RANCANG BANGUN SISTEM KENDALI OTOMATIS
TRAKTOR RODA EMPAT
SKRIPSI
Oleh:
TRISNAWAHYUDI
F14052423
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM
FAKULTAS TEKNOLOGI PERTANIAN
DESIGN OF FOUR-WHEEL-
DRIVE TRACTOR’
S
AUTOMATIC CONTROL SYSTEM
Trisnawahyudi and I Dewa Made Subrata
Department of Mechanical and Biosystem Engineering, Faculty of Agricultural Technology,
Bogor Agricultural University, IPB Darmaga Campus, PO BOX 220, Bogor, West Java, Indonesia
Phone +62 878 7412 7617, e-mail : [email protected]
ABSTRACT
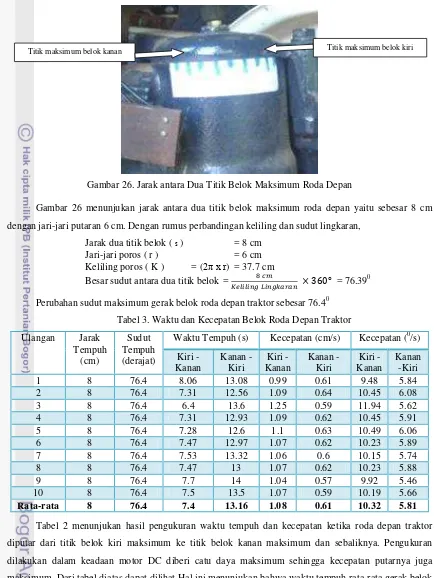
Automation of four-wheel-drive tractor is an alternative of solution to the lack of manpower operator in the future. With the automated control system, the tractors can be operated without interruption as long as the fuel still available, workload and fatigue experienced by operators can be reduced, can also improve the accuracy of productivity, and reduce the possibility of overlapping while processing of land. In this current research, control of tractor is limited to the operation of acceleration pedal, clutch system, and steering systems. The main components of the control system consists of a DC-motor as a driving power transmission system that connects actuators, and sensors that monitor the position of the movement of the actuator position. These components were designed to work according to the steps of manually operation. Data research showed the system to function properly. Speed of the clutch lever operation until it reaches the point of maximum point is onesecond, and the release rate to the point of minimum pressure is two seconds. Average rotary speed of steering wheel to deflect to the right is the 7.40°/s, and for a left turn is 13.16°/s. Acceleration lever presses speed is 17.91 cm/s and the speed of release is 20.99 cm/s.
Trisnawahyudi. F14052423. Rancang Bangun Sistem Kendali Otomatis Traktor Roda Empat.Di bawah bimbingan I Dewa Made Subrata. 2012
RINGKASAN
Penggunaan traktor secara terus-menerus dapat mengakibatkan kelelahan bagi operatornya.
Dalam keadaan lelah, operator tidak dapat bekerja secara optimal. Hal ini dapat menyebabkan
produktivitas dan efisiensi pekerjaan menurun sehingga dibutuhkan penggantian operator atau waktu
istirahat yang cukup untuk melanjutkan pekerjaannya. Untuk mengatasi masalah tersebut, otomasi
sistem pengendalian traktor merupakan salah satu solusinya. Dengan melakukan otomasi sistem
pengendalian pada traktor, beban kerja dan kelelahan yang dialami operator dapat dikurangi serta
dapat pula meningkatkan produktivitas operasi traktor dan mengurangi kemungkinan terjadinya
overlapping hasil pengolahan tanah.
Tujuan penelitian ini adalah membuat rancang bangun mekanisme pengendali otomatis traktor
roda empat yang dapat membantu mengurangi kelelahan operator selama mengoperasikannya. Sistem
pengendalian traktor yang akan dirancang mencakup sistem pengendali kemudi, sistem pengendali
tuas akselerasi, dan sistem pengendali kopling. Sistem pengendali harus dirancang tanpa
memodifikasi bentuk asli traktor dan menghindari pengeboran, pengelasan, dan sebagainya pada
traktor.
Hasil perancangan yang terpasang pada traktor diatur agar tidak mengganggu kenyamanan
operator dalam pengoperasian secara manual sehingga traktor tetap dapat dioperasikan dengan atau
tanpa mekanisme pengendali otomatis. Metode yang digunakan dalam penelitian kali ini adalah
metode rancang bangun dengan pendekatan rancangan fungsional dan struktural. Masing-masing
komponen mekanisme pengendali dirancang dan kemudian dilakukan uji statis untuk mengetahui
fungsi dan performanya.
Dari hasil analisis rancangan, komponen penyusun mekanisme pengendali kopling terdiri atas,
motor DC 24 volt, dudukan motor DC, perpanjangan tuas kopling, klem, puli, dan kabel penarik.
Komponen penyusun mekanisme pengendali kemudi yaitu motor DC sebagai penggerak kemudi,
rotary encoder sebagai sensor pendeteksi posisi roda depan, sistem transmisi tenaga T-Belt yang menyalurkan tenaga dari motor DC ke kemudi, dudukan motor dan tiang penyangga. Komponen
sistem pengendali akselerasi terdiri atas motor DC, potensiometer, batang transmisi, dudukan motor,
puli, dan kabel penarik.
Pengujian dilakukan dengan menggerakkan sistem hasil rancangan sesuai dengan langkah
pengoperasian traktor roda empat secara manual. Tuas kopling dikendalikan dengan menariknya
hingga ke posisi maksimum penekanan, ditahan pada posisi tersebut kemudian dilepaskan secara
perlahan. Selama traktor beroperasi, sensor yang terpasang pada roda depan dan motor DC pengendali
hingga kecepatan traktor kembali seperti semula, dan jika sudut roda depan traktor berubah (berbelok)
maka sistem kontrol akan memutar kemudi ke posisi roda depan lurus.
Uji coba mekanisme dilakukan dalam dua tahap yaitu uji coba kalibrasi dan validasi. Uji coba
kalibrasi bertujuan menetapkan hubungan nilai encoder terhadap sudut putar roda depan traktor, dan
hubungan nilai ADC keluaran dari potensiometer terhadap persentase penekanan pedal akselerasi.
Sebaliknya uji validasi bertujuan untuk membuktikan persamaan hasil uji kalibrasi.
Data hasil pengujian menunjukkan lama waktu yang dibutuhkan untuk menekan tuas kopling
ke posisi maksimum penekanan adalah satu detik dan untuk melepaskannya dibutuhkan waktu dua
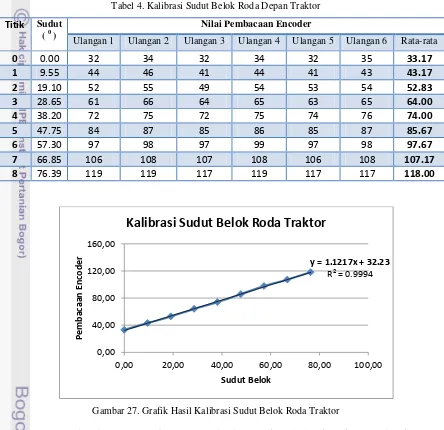
detik. Sedangkan untuk mekanisme pengendali kemudi traktor, hubungan nilai encoder (y) yang
terbaca terhadap sudut putar roda depan traktor (x) ditunjukkan dengan persamaan; y = 1.019x+32.23, dengan kecepatan putar rata-rata kemudi untuk berbelok ke kanan adalah 7.40 °/s , dan untuk berbelok
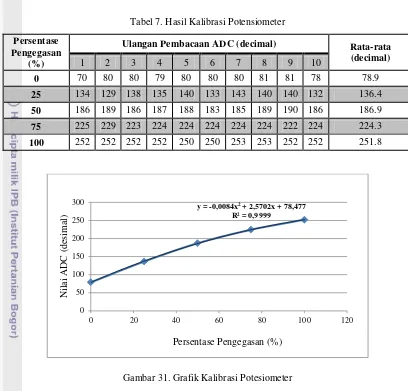
ke kiri adalah 13.16°/s. Untuk mekanisme pengendali akselerasi, nilai ADC keluaran dari
potensiometer (y) terhadap persentase penekanan pedal akselerasi (x) dapat diketahui dengan
RANCANG BANGUN SISTEM KENDALI OTOMATIS
TRAKTOR RODA EMPAT
SKRIPSI
Sebagai salah satu syarat untuk memperoleh gelar
SARJANA TEKNOLOGI PERTANIAN
Pada Departemen Teknik Mesin dan Biosistem
Fakultas Teknologi Pertanian
Institut Pertanian Bogor
Oleh :
TRISNAWAHYUDI
F14052423
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM
FAKULTAS TEKNOLOGI PERTANIAN
Judul Skripsi : Rancang Bangun Sistem Kendali Otomatis Traktor Roda Empat
Nama : Trisnawahyudi
NIM : F14052423
Menyetujui,
Pembimbing Akademik,
Dr. Ir. I Dewa Made Subrata, M.Agr NIP. 19620803 198703 1 002
Mengetahui :
Ketua Departemen Teknik Mesin dan Biosistem,
Dr. Ir. Desrial, M.Eng NIP. 19661201 199103 1 004
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASINYA
Saya menyatakan dengan sebenar-benarnya bahwa skripsi dengan judul Rancang Bangun Sistem Kendali Otomatis Traktor Roda Empat adalah hasil karya saya sendiri dengan arahan Dosen Pembimbing Akademik, dan belum diajukan dalam bentuk apapun pada perguruan tinggi manapun.
Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari
penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi.
Bogor, Desember 2012
Yang membuat pernyataan
© Hak cipta milik Trisnawahyudi, tahun 2012
Hak cipta dilindungi
BIODATA PENULIS
Trisnawahyudi. Lahir di Prabumulih, 19 Juli 1988 sebagai anak kedua dari empat bersaudara
pasangan Marwah dan Yuningsih. Sejak sekolah dasar hingga sekolah menengah atas, penulis
menjalankan pendidikannya di provinsi Sumatera Selatan. Di tahun 1993-1999, penulis bersekolah
dasar di SDN 1 Desa Ketiau. Dan tahun 1999-2002 melanjutkan di SLTP Cinta Manis. Di tingkat
sekolah menengah atas, penulis melanjutkan pendidikannya di SMA N 3 Unggulan Kayu Agung pada
tahun 2002-2005 dan kemudian di bulan Juli tahun 2005 penulis diterima di IPB melalui jalur
Undangan Seleksi Masuk IPB di Departemen Teknik Pertanian yang saat ini berubah nama menjadi
Teknik Mesin dan Biosistem. Pada saat yang sama penulis juga diterima sebagai salah satu penerima
program beasiswa Beastudi Etos dari lembaga Dompet Dhuafa Republika selama tiga tahun.
Selama mengikuti perkuliahan, penulis aktif dalam berbagai organisasi dakwah kampus. Pada
tahun 2005-2006 penulis menjadi Ketua Divisi Informasi dan Komunikasi IKMT (Ikatan Keluarga
Muslim TPB), di tahun 2006-2007 penulis aktif dalam organisasi FBI (Forum Bina Islami) hingga
kemudian diangkat menjadi Ketua Divisi Syiar di tahun 2007-2008, dan di tahun 2008-2009 penulis
menjadi Ketua Divisi Internal Asistensi Pendidikan Agama Islam.
Selain berorganisasi, penulis juga memiliki pengalaman sebagai asistensi mata kuliah Ilmu
Ukur Wilayah dan mata kuliah Motor dan Tenaga Pertanian di semester genap tahun ajaran
2008-2009, asistensi mata kuliah Pendidikan Agama Islam di tahun 2009-2010, dan asisten mata kuliah Ilmu
Ukur Tanah di semester genap tahaun ajaran 2009-2010.
KATA PENGANTAR
Segala sembah, pujian, dan syukur penulis panjatkan hanya pada Allah SWT, Dzat yang
menggenggam takdir semua makhluk-Nya. Atas berkah, rahmat, dan hidayahNya penulis dapat
menyelesaikan penelitian serta penulisan skripsi dengan judul Rancang Bangun Sistem Kendali Otomatis Traktor Roda Empat. Skripsi ini disusun sebagai salah satu syarat untuk memenuhi tugas akhir pada Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, Institut Pertanian
Bogor.
Ucapan terima kasih saya sampaikan kepada pihak-pihak yang telah membantu, baik
dalam kegiatan penelitian di lapangan maupun dalam penyusunan skripsi ini. Secara khusus saya
sampaikan rasa terima kasih saya kepada :
1. Dr. Ir. I Dewa Made Subrata, M.Agr selaku dosen pembimbing akademik atas nasehat, kesabaran, motivasi, dan pengarahannya selama penulis melaksanakan tugas akhir dan
penyusunan skripsi.
2. Dr. Ir. Desrial, M.Agr selaku ketua departemen Teknik Mesin dan Biosistem sekaligus ketua proyek penelitian, yang telah memberi kesempatan penulis bergabung dan melakukan penelitian
dan tugas akhirnya.
3. Eno Sumarno, dan Cecep Saepul Rahman, STP sebagai rekan penelitian yang telah banyak membantu hingga selesai penelitian.
4. Staff Fakultas Teknologi Pertanian dan Departemen Teknik Mesin dan Biosistem khususnya staff Laboratorium Lapangan Departemen Teknik Mesin dan Biosistem di Leuwikopo atas
bantuan selama penelitian
5. Kedua orang tua, kakak, dan adik-adikku yang tak pernah bosan mendoakan dan memberi dukungan.
6. Teman-teman TEP 44, terima kasih atas kebersamaannya
Masih terdapat banyak kekurangan dalam tulisan ini. Oleh karena itu kritik dan saran sangat
diharapkan oleh penulis. Mohon maaf penulis sampaikan atas segala kekurangan dan kesalahan.
Semoga skripsi ini bermanfaat bagi penulis dan semua pembaca.
Bogor, Desember 2012
DAFTAR ISI
Halaman
KATA PENGANTAR ... iii
DAFTAR TABEL... vi
DAFTAR GAMBAR ... v
DAFTAR LAMPIRAN ... vi
I. PENDAHULUAN ... 1
1.1. Latar Belakang ... 1
1.2. Tujuan ... 2
1.3. Batasan Penelitian ... 2
II. TINJAUAN PUSTAKA ... 3
2.1 Traktor ... 3
2.2 Sistem Kontrol ... 10
2.3 Motor Listrik ... 13
2.4 Perancangan (Desain) ... 15
III. METODE PENELITIAN ... 16
3.1. Tempat dan Waktu ... 16
3.2. Alat dan Bahan ... 16
3.3. Tahapan Proses Penelitian ... 16
IV. ANALISIS STRUKTURAL DAN FUNGSIONAL ... 21
4.1. Mekanisme Kopling... 21
4.2. Mekanisme Kemudi ... 25
4.3. Mekanisme Akselerasi ... 28
V. HASIL DAN PEMBAHASAN ... 31
5.1. Mekanisme Pengendali Kopling ... 31
5.2. Mekanisme Pengendali Kemudi ... 34
5.3. Mekanisme Pengendali Akselerasi ... 39
VI. KESIMPULAN DAN SARAN ... 43
6.1. Kesimpulan ... 43
6.2. Saran ... 43
DAFTAR PUSTAKA ... 44
DAFTAR TABEL
Halaman
Tabel 1. Klasifikasi Traktor Roda Empat ... 3
Tabel 2. Istilah-Istilah dalam Sistem Kontrol... 11
Tabel 3. Waktu dan Kecepatan Belok Roda Depan Traktor ... 37
Tabel 4. Kalibrasi Sudut Belok Roda Depan Traktor ... 38
Tabel 5. Validasi Sudut Belok Roda Depan Traktor ... 39
Tabel 6. Waktu dan Kecepatan Kendali Akselerasi ... 41
DAFTAR GAMBAR
Halaman
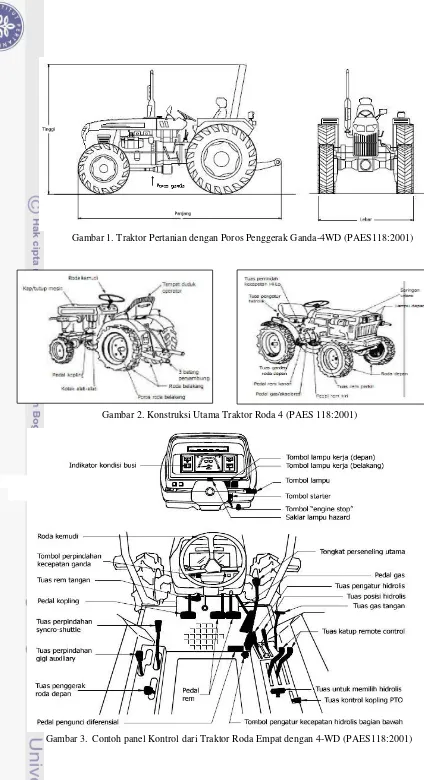
Gambar 1. Traktor Pertanian Dengan Poros Penggerak Ganda-4WD (PAES 118:2001) ... 4
Gambar 2. Konstruksi Utama Traktor Roda 4 (PAES 118:2001) ... 4
Gambar 3. Contoh Panel Kontrol Dari Traktor Roda Empat Dengan 4-WD (PAES 118:2001) ... 4
Gambar 4. Pemberat Tambahan Pada Traktor ... 6
Gambar 5. Konstruksi Pedal Rem Traktor Roda Empat ... 6
Gambar 6. Alat Kemudi Traktor Roda Empat... 7
Gambar 7. Pengendali Traktor Roda Empat... 7
Gambar 8. Diagram Sistem Kontrol ... 10
Gambar 9. Diagram Jenis-Jenis Motor Listrik ... 13
Gambar 10. Diagram Alir Proses Perancangan (Harsokoesoemo, 1999) ... 15
Gambar 11. Diagram Alir Perancangan Mekanisme Pengendali Kopling, Kemudi, Akselerasi ... 16
Gambar 12. Desain Mekanisme Pengendali Kopling ... 21
Gambar 13. Desain Bentuk Klem... 23
Gambar 14. Desain Bentuk Puli ... 23
Gambar 15. Motor DC Dengan Transmisi Worm Gear ... 24
Gambar 16. Desain Mekanisme Pengendali Kemudi ... 25
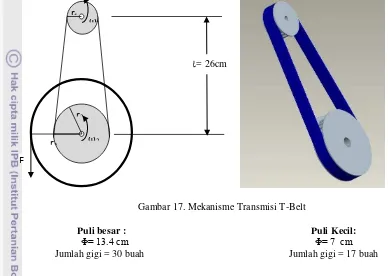
Gambar 17. Mekanisme Transmisi T-Belt ... 26
Gambar 18. Tiang Penyangga ... 27
Gambar 19. Desain Mekanisme Pengendali Akselerasi ... 28
Gambar 20. Batang Transmisi ... 29
Gambar 21. Desain Dudukan Motor ... 30
Gambar 22. Potensiometer ... 30
Gambar 23. Hasil Rancangan Mekanisme Pengendali Kopling ... 32
Gambar 24. Pemasangan Komponen Mekanisme Pengendali Kemudi ... 35
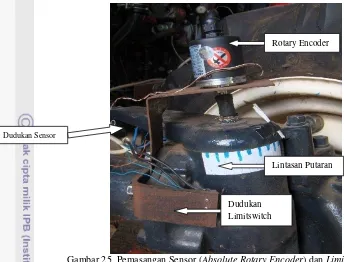
Gambar 25. Pemasangan Sensor (Absolute Rotary Encoder) dan Limitswitch ... 36
Gambar 26. Jarak Antara Dua Titik Belok Maksimum Roda Depan ... 37
Gambar 27. Grafik Hasil Kalibrasi Sudut Belok Roda Traktor ... 38
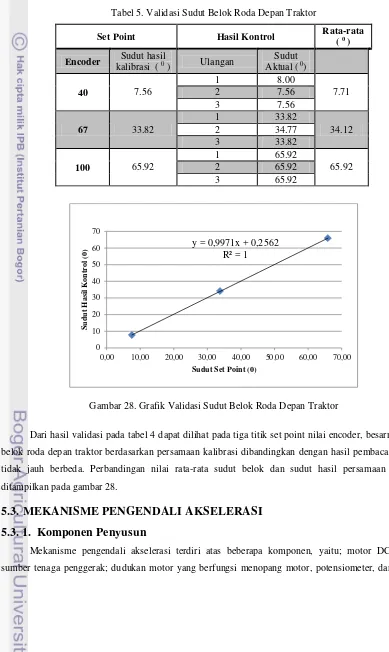
Gambar 28. Grafik Validasi Sudut Belok Roda Depan Traktor ... 39
Gambar 29. Pemasangan dan Pengaplikasian Komponen Pengendali Akselerasi ... 40
Gambar 30. Posisi Limitswitch Atas dan Bawah ... 40
DAFTAR LAMPIRAN
Halaman
Lampiran 1. Alternatif Desain ... 45
Lampiran 2. Analisis Perhitungan ... 48
Lampiran 3. Gambar Desain Puli ... 51
Lampiran 4. Gambar Desain Klem... 52
Lampiran 5. Gambar Desain Batang Transmisi ... 54
Lampiran 6. Gambar Desain Dudukan Motor ... 55
Lampiran 7. Gambar Desain Sistem Transmisi T-Belt ... 56
1
I.
PENDAHULUAN
1.1.
LATAR BELAKANG
Penggunaan Mekanisasi di Indonesia masih belum merata pemakaiaannya di bidang pertanian.
Walaupun sebagian kegiatan telah digantikan dengan peralatan mekanis tetapi tetap kebutuhan tenaga
manusia sebagai operator peralatan dan mesinnya diperlukan. Pertanian tradisional yang ditandai dengan
penggunaan tenaga manusia secara dominan yang memiliki batasan kelelahan dalam bekerja sehingga
menyebabkan efisiensi di setiap bidang pekerjaan pertanian masih rendah dan berdampak pada
produktivitas yang rendah pula. Pertanian modern merupakan pertanian yang berbasis pada peningkatan
efisiensi, produktivitas, dan juga konservasi sumberdaya. Dalam upaya peningkatan efisiensi dan
produktivitas dalam pertanian modern sekarang ini, penggunaan mesin- mesin pertanian semakin sering
digunakan.
Efisisensi pada bidang pertanian terkait erat dengan penggunaan teknologi Alat dan Mesin
Pertanian. Umumnya, penggunaan teknologi Alat dan Mesin Pertanian akan meningkatkan kapasitas
kerja dan produktivitas pekerjaan. Traktor merupakan salah satu contoh penggunaan mekanisasi untuk
persiapan dan pengolahan lahan pertanian. Kelebihan traktor selain sebagai sumber penggerak utama
bagi implemen pertanian seperti bajak, juga memiliki power, durability, precission yang jauh lebih baik dibanding tenaga manusia dan hewan.
Akan tetapi, penggunaan traktor secara terus-menerus masih dapat mengakibatkan kelelahan bagi
operatornya sehingga pekerjaan menjadi kurang optimal. Hal ini dapat menyebabkan produktivitas dan
efisiensi pekerjaan menurun sehingga dibutuhkan penggantian oleh operator baru yang tenaganya masih
segar. Namun, di zaman sekarang ini tenaga di bidang pertanian semakin berkurang, hal ini terkait dengan
paradigma masyarakat bahwa pekerjaan di bidang pertanian adalah bukan pekerjaan yang menjanjikan.
Kesimpulannya, penggantian terhadap operator yang mengalami kelelahan adalah bukan solusi yang tepat
Untuk mengatasi masalah tersebut, otomasi sistem kendali pada traktor merupakan salah satu
solusinya. Dengan melakukan otomasi pada traktor ini dapat mengurangi beban kerja, kelelahan yang
dialami operator dan kemungkinan terjadinya overlapping hasil pengolahan tanah serta dapat pula meningkatkan ketelitian dan produktivitas operasi traktor.
Pada penelitian ini dilakukan perancangan sistem pengendalian traktor secara otomatis. Sistem
pengendalian traktor yang dirancang mencakup sistem kemudi, sistem kopling, dan sistem pengendali
pedal akselerasi. Sedangkan sistem persneling, sistem pengendali tuas implement dan navigasi masih tetap dikendalikan oleh operator. Hasil rancangan/modifikasi kendali mekanis menjadi otomatis
kemudian akan terintegrasi dengan sistem kontrol otomatis yang menggunakan sebuah mikrokontroler
DT-51 minimum sistem versi 3.3 sehingga pengontrolan sistem sepenuhnya dilakukan secara otomatis
tanpa operator (stand alone). Hasil rancangan sistem pengendalian ini diharapkan tidak mengganggu kenyamanan operator saat mengendarai traktor secara manual sehingga traktor masih tetap bisa
2
1.2.
TUJUAN
Tujuan umum penelitian ini adalah membuat rancang bangun mekanisme pengendali otomatis
traktor roda empat yang dapat membantu mengurangi kelelahan operator selama mengoperasikannya.
Sedangkan tujuan khusus dari penelitian ini adalah :
1. Memodifikasi sistem kendali mekanis traktor menjadi sistem kendali.otomatis. 2. Merancang bangun prototype pengendali otomatis traktor roda empat.
3. Melakukan kalibrasi, dan uji statis mekanisme pengendalian otomatis traktor roda empat.
1.3.
BATASAN PENELITIAN
Rancang bangun dalam penelitian kali ini perlu memperhatikan beberapa hal yang menjadi batasan
masalahnya:
1. Sistem pengendalian yang dirancang terbatas pada rancangan pengendalian kemudi, pengendalian kopling, dan pengendalian pedal akselerasi.
2. Modifikasi harus dirancang tanpa merubah bentuk asli traktor dan menghindari pengeboran, pengelasan, dan sebagainya pada traktor.
3. Hasil modifikasi kemudi, kopling, dan pedal akselerasi tidak mengganggu kenyamanan operator dalam pengoperasian secara manual sehingga traktor tetap dapat dioperasikan dengan atau tanpa
3
II.
TINJAUAN PUSTAKA
2.1.
TRAKTOR
Traktor adalah suatu mesin traksi yang utamanya dirancang dan dinyatakan sebagai penyedia
tenaga bagi peralatan pertanian dan perlengkapan usaha tani (Sembiring N. dkk, 1998). Traktor didesain secara spesifik untuk keperluan traksi tinggi pada kecepatan rendah, atau untuk menarik trailer atau
instrumen yang digunakan dalam pertanian atau konstruksi.
Menurut SNI 7416:2010, traktor roda empat adalah mesin berdaya gerak sendiri berupa motor
diesel, beroda empat (ban karet atau ditambah roda sangkar dari baja) mempunyai tiga titik gandeng,
berfungsi untuk menarik, menggerakkan, mengangkat, mendorong alat dan mesin pertanian dan juga
sebagai sumber daya penggerak. Berdasarkan besaran daya sumber penggerak motor diesel dan kategori
tiga titik-gandeng, traktor roda empat diklasifikasikan atas empat kelas, seperti tertera pada Tabel.1 di
bawah ini.
Tabel 1. Klasifikasi Traktor Roda Empat
Klasifikasi Traktor Klasifikasi Traktor
Dayamotor (kW) Kategori 3-titik-gandeng
Traktor Mini 9-15 1
Traktor Kecil 15 - 35 1
Traktor Sedang 30 – 75 2
Traktor Besar 60 – 168 2 dan 3
Traktor Sangat 135- 300 3 dan 4
Berdasarkan jumlah poros penggeraknya, traktor roda empat dapat diklasifikasikan ke dalam dua
jenis yaitu:
a) Traktor dengan poros penggerak tunggal (two wheel drive, 2WD); yaitu traktor yang digerakkan oleh kedua roda belakang.
b) Traktor dengan poros penggerak ganda (four wheel drive, 4WD); yaitu traktor yang digerakkan oleh keempat roda.
2.1.1.
Konstruksi Utama Traktor
Konstruksi utama traktor roda empat yaitu: - Mesin sebagai sumber penggerak
- Transmisi daya, biasanya berupa roda gigi, sabuk dan sproket, atau kombinasi keduanya - Alat penggerak, yaitu roda, roda rantai, dsb
- Alat pengendali, yaitu berupa kemudi, kopling, kopling kemudi, rem, stir, dsb - Alat yang bekerja, yaitu implemen atau trailer yang ditarik
Menurut SNI 7416:2010, Konstruksi traktor pertanian ditunjukkan pada Gambar 1, Gambar 2, dan
4
Gambar 1. Traktor Pertanian dengan Poros Penggerak Ganda-4WD (PAES118:2001)Gambar 2. Konstruksi Utama Traktor Roda 4 (PAES 118:2001)
5
Dalam media E-learning TEP FATETA IPB, dijelaskan secara rinci tentang konstruksi dan fungsi traktor roda empat. Traktor roda empat secara mendasar terdiri dari bagian-bagian utama sebagai berikut:1. Enjin (engine)
2. Alat untuk penyaluran tenaga (power transmission device) 3. Alat untuk bergerak (running device)
4. Alat untuk kemudi (steering device) 5. Alat untuk bekerja (working device) 1. Enjin
Kebanyakan dari traktor roda empat dilengkapi dengan enjin diesel, 4-tak, berpendingin air.
Banyak diantaranya memiliki 2 hingga 6 silinder. Enjin traktor nampak seperti enjin truk atau bus tetapi
dilengkapi dengan sistem governor yang efektif untuk keperluan dapat menjaga putaran konstan dengan
tanpa memandang beban yang diberikan.
Enjin dari sebuah traktor roda empat umumnya dilengkapi dengan:
a) Sistem bahan bakar. Enjin traktor biasanya memiliki sebuah pompa injeksi untuk setiap silinder. Untuk mengalirkan bahan bakar, diperlukan pompa bahan bakar
b) Sistem pelumasan. Minyak pelumas dialirkan secara paksa oleh pompa minyak pelumas ke berbagai bagian enjin.
c) Sistem pendingin. Radiator dan kipas pendingin selalu melengkapi enjin yang berpendingin air. Pompa harus dilengkapi untuk memastikan terjadinya sirkulasi air.
d) Sistem listrik. Ada alat motor starter untuk memutar flywheel yang memanfaatkan aki sebagai sumber tenaganya. Aki juga digunakan untuk menyalakan lampu, klakson dan aksesoris lainnya.
Aki dicharge oleh generator, yang selalu berputar bersama putaran enjin.
2. Alat untuk penyaluran tenaga
Alat ini berfungsi menyalurkan tenaga dari enjin menuju roda, poros PTO, pompa oli untuk
menggerakkan tiga-titik gandeng (thre-point linkage/hitch), dan lain-lainnya, pada berbagai tingkat kecepatan putaran. Penyaluran tenaga ke roda, mirip dengan yang ada pada mobil, yaitu memiliki urutan
dari enjin – kopling -- gigi kecepatan -- gigi diffrensial -- poros roda. Karena traktor bergerak dengan
kecepatan yang sangat bervariasi, mulai dari 0,3 hingga 10 km/jam di lahan, dan 15–24 km/jam di jalan
raya, jumlah gigi perubahan kecepatan umumnya bervariasi dari 6 hingga 12, atau lebih. Gigi differensial
dapat dikunci dengan diffrential lock, ini akan membuat kedua roda penggerak berputar bersamaan bila salah satu roda mengalami slip. Blok enjin dan sistem transmisi biasanya menjadi satu sebagai badan
utama traktor, maka dia dibuat dengan konstruksi yang sangat kuat. 3. Alat untuk bergerak
Bagian utama untuk bergerak adalah roda ban. Roda ban traktor ukurannya besar, untuk
memberikan ground clearance yang besar, juga untuk mempermudah gerak pada lahan tidak rata, dan juga untuk meningkatkan kemampuan traksi. Namun demikian, untuk lebih meningkatkan kemampuan
traksinya, kembang roda ban dibuat lebih tinggi. Demikian juga sering dilengkapi dengan berat tambahan
6
Gambar 4. Pemberat Tambahan Pada TraktorNamun demikian, pada lahan sawah yang berlumpur, beban yang berat akan malah menghambar
gerak traktor. Oleh sebab itu, traktor untuk lahan sawah biasanya dilengkapi roda sangkar, untuk
mengurangi tekanan kontak.
Rem hanya disediakan pada roda belakang. Rem roda kiri dan kanan dapat dipergunakan
sendiri-sendiri untuk memudahkan belok (Gambar 5). Traktor untuk lahan sawah biasanya dilengkapi dengan
rem yang memilik bearing dengan seal kedap air.
Beberapa traktor dengan berpenggerak empat roda memiliki empat buah roda yang sama besar,
dan ada yang memiliki roda depan yang lebih kecil. Traktor yang memiliki empat roda yang sama besar
umumnya memberikan traksi yang lebih besar, tapi lebih sulit untuk dikemudikan dibandingkan dengan
yang roda depannya lebih kecil.
7
4. Alat untuk kemudiTraktor roda empat umumnya dikemudikan dari ruang kemudi dengan mengendalikan roda depan
melalui roda kemudi (stir), sebagaimana umumnya mobil. Namun ada juga kemudi dilakukan dengan
mengatur roda belakang, seperti traktor buatan Thailand (Gambar 6). Gigi differential sangat penting
untuk poros roda penggerak, dan jangan gunakan differential lock saat berbelok. Sistem power steering
digunakan untuk traktor besar. Ini akan membantu memperingan pengemudian traktor. Saat berbelok,
diperlukan juga bantuan rem kiri bila berbelok tajam ke kiri atau sebaliknya.
Gambar 6. Alat Kemudi Traktor Roda Empat
2.1.2.
Sistem Kendali Traktor Roda Empat
Menurut Sihotang (2010), Pengendali adalah indikator, saklar, tuas dan pedal yang digunakan
untuk mengendalikan jalannya traktor. Pengendali yang ada pada traktor roda empat dapat dibagi menjadi
dua kelompok, yaitu:
8
1. Indikator dan saklar pada dashboard, antara lain:a) Kunci kontak (saklar utama) b) Saklar lampu depan
c) Saklar lampu sein d) Tombol klakson
e) Indikator pemanas mesin f) Indikator pengisian accu
g) Indikator temperatur air h) Indikator sirkulasi oli pelumas i) Tuas dekompresi
j) Tachometer dan meter jam k) Sikring
2. Tuas dan pedal pengatur, antara lain: a) Tuas pengatur gas
Kecepatan (gas) akan besar apabila tuas ditarik. Gas akan kecil apabila disorong ke depan.
Apabila gas didorong lebih lanjut, gas akan berhenti. Ada juga jenis traktor yang dilengkapi
dengan tuas khusus untuk mematikan motor penggerak. Tuas gas ini berfungsi untuk menjaga
kecepatan jalan traktor akan tetap pada saat dioperasikan. b) Tuas hidrolik
Tuas hidrolik berfungsi untuk menggerakkan sistem hidrolik yang umumnya digunakan
untuk menggerakkan lengan pengangkat implemen. Bila tuas didorong ke depan, implemen akan
turun, bila ditarik ke belakang implemen akan naik (terangkat). Apabila tuas pada posisi netral,
implemen akan berhenti ada posisi tertentu. c) Tuas persneleng utama
Biasanya tuas perneleng terdiri dari 3 atau 4 kecepatan maju dan satu kecepatan mundur. d) Tuas persneleng cepat/ lambat
Tuas persneleng cepat/lambat (Hi-Low) digunakan untuk membedakan kecepatan di lahan (pada saat mengolah tanah) dan kecepatan di jalan. Dengan tuas persneleng cepat lambat,
kombinasi kecepatan menjadi 6 atau 8 maju dan 2 mundur. e) Tuas persneleng PTO
Berfungsi untuk mengubah kecepatan putar poros PTO yang diinginkan. Setiap jenis trator
berbeda beda jumlah kecepatannya. Ada yang hanya satu, dua atau tiga macam kecepatan. f) Tuas gardan depan
Khusus untuk traktor yang mempunyai dobel gadan, dilengkapi dengan tuas gardan depan.
Tuas ini berfungsi untuk menyambung gardan depan apabila diperlukan. Gardan depan digunakan
untuk memperbesar daya tarik traktor. g) Pedal kopling
Gunanya untuk menghubungkan dan melepaskan, hubungan antara motor penggerak
dengan transmisi. Apabila pedal kopling diinjak, hubungan motor dengan transmisi terputus.
h) Pedal rem (kiri dan kanan)
Pedal rem roda kiri dan rem roda kanan terpisah satu sama lain. Dengan terpisahnya pedal
rem, dapat membantu berbeloknya traktor secara tajam. Pada saat traktor berjalan di jalan, pedal
rem harus dikunci (disatukan kembali). Menginjak satu rem saja pada saat traktor berjalan cepat
9
i) Pedal gas (pedal akselerasi)Beberapa jenis traktor dilengkapi dengan pedal gas, selain tuas gas. Tekan pedal gas
apabila ingin mempercepat putaran motor penggerak. Lepaskan pedal gas apabila ingin
memperlambat. j) Tuas rem parkir
Tuas rem parkir berfungsi menahan rem tetap pada posisi mengerem. Bebapa jenis traktor
ada juga yang mengunakan tuas rem parkir tersendiri. k) Pedal pengunci differensial (gardan)
Gardan berfungsi untuk memungkinkan roda kanan dan roda kiri belakang dapat berputar
dengan kecepatan berbeda, sehingga traktor dapat berbelok. Namun dengan adanya gardan
menyebabkan salah satu roda akan slip. Dengan menginjak pedal pengunci differensial, putaran
kedua roda belakang akan sama, sehinga slip bisa diatasi.
l) Pengunci kap motor
Apabila kita ingin memeriksa motor traktor, kap motor harus dibuka terlebih dahulu. Untuk
membuka kap motor, pengunci harus dilepas terlebih dahulu. m) Pengatur tempat duduk
Tempat duduk dapat diatur maju atau mundur sesuai dengan keinginan operator. Caranya
dengan memindah pen ke lubang lain yang diinginkan.
2.1.3.
Langkah Pengoperasian Traktor Roda Empat
Sangat penting memahami langkah-langkah pengoperasian traktor roda empat sehingga operator
lebih mudah mengendalikannya. Hal paling dasar yang harus diketahui adalah cara menghidupkan dan
mematikan traktor. Sebagian besar, traktor roda empat menggunakan motor diesel sebagai tenaga
penggerak dan dihidupkan dengan motor stater. Sihotang (2010) menjelaskan, sebelum traktor
dihidupkan, harus diperiksa terlebih dahulu, sehingga traktor siap untuk dioperasikan. Kran bahan bakar
dalam posisi “OPEN”. Rem terkunci. Berikut ini akan dijelaskan lebih detail cara menghidupkan dan mematikan traktor roda empat, beserta tujuannya.
a) Menghidupkan traktor roda empat:
- Naik ke traktor dengan posisi maju, karena sekalian melihat bagian pengendali. Hati -hati tidak boleh menyentuh bagian pengendali, baik tangan maupun kaki.
- Duduklah yang baik di tempat duduk, karena seluruh anggota badan diperlukan untuk mengendalikan traktor.
- Semua saklar diposisikan “OFF”, untuk menghemat arusaccusaat kunci kontak pada posisi “ON”
- Semua tuas dan pedal netral. Sehingga pada saat traktor dihidupkan, seluruh peralatan traktor tidak berjalan.
- Masukkan kunci kontak dan putar ke kanan ke arah “ON”
- Lihat, apakah lampu indikator pengisian accu dan indikator sirkulasi oli pelumas menyala.
- Putar kunci kontak ke kanan ke arah “PREHEAT” selama kurang lebih 10 – 20 detik. Atau sampai indikator pemanas mesin berpijar, sebagai tanda ruang pembakaran sudah cukup panas. Dengan panasnya ruang pembakaran, akan mempermudah terjadinya proses pembakaran.
10
- Putar kunci kontak ke kanan penuh ke arah “START”, sehingga motor stater akan memutar motorpenggerak.
- Setelah motor hidup, segera lepaskan kunci kontak, sehingga kunci kontak secara otomatis kembali ke
posisi “ON”. Untuk mematikan motor stater
- Setelah motor hidup, lampu indikator pengisian accu dan indikator sirkulasi oli pelumas mati. - Kecilkan posisi gas ke idle
- Lepaskan pedal kopling pelan-pelan
2.2.
SISTEM KONTROL
2.2.1.
Pengertian Sistem Kontrol
Menurut Ogata (1997) sistem adalah kombinasi dari beberapa komponen yang bekerja
bersama-sama dan melakukan sasaran tertentu sedangkan kontrol merupakan usaha pengaturan operasi-operasi
terhadap obyek atau proses agar sesuai dengan tujuan tertentu tersebut. Sehingga kontrol otomatik adalah
usa ha pengaturan operasi-operasi terhadap obyek atau proses dengan kombinasi dari beberapa
komponen yang bekerja secara bersama-sama untuk mencapai sasaran atau tujuan tertentu
Komponen dasar dari sistem kontrol (Kuo, 1982), yaitu tujuan kontrol, komponen sistem kontrol
dan hasil atau keluaran. Dalam istilah yang lebih teknis tujuan dapat dihubungkan erat dengan masukan
atau sinyal dan hasilnya disebut keluaran atau variabel yang dikendalikan.
Sistem kontrol adalah suatu proses pengaturan atau pengendalian terhadap satu atau beberapa
besaran (variable, parameter) sehingga berada pada suatu harga atau pada suatu rangkaian harga (range)
tertentu. Komponen-komponen dari suatu sistem kontrol digambarkan dalam suatu blok diagram dibawah
ini.
Gambar 8. Diagram Blok Sistem Kontrol
Dari blok diagram di atas dapat dilihat komponen dari suatu sistem kontrol terdiri dari input set point
(R(t)), sinyal eror (e(t)), kontroler, sinyal kontrol (U(t)), actuator, plant/proses, output (c(t)), dan eror
detector dengan fungsi masing-masing sebagai berikut:
- Input set point (R(t)) adalah nilai variable yang diinginkan oleh selama pengontrolan atau pengendalian oleh system.
- Signal eror (e(t)) adalah selisih antara nilai input set point (R(t)) dengan outpu (c(t)). Signal eror ini merupakan input bagi kontroler dan nilainya harus sekecil mungkin, eror signal diolah atau
diproses oleh kontroler agar diperoleh niali output yang diinginkan.
11
- Kontrol signal adalah signal yang dihasilkan oleh kontroler dan berfungsi untuk pengontrolan proses yang diinginkan dan berfungsi untuk menyamakan input signal dengan output signal.- Actuator adalah komponen yang melakukan proses yang diperintahkan oleh kontroler.
- Plant/proses adalah objek tertentu yang dikontrol oleh sistem. Biasanya berupa proses mekanis,
hidrolis, pneumatic, atau kombinasinya.
- Output (c(t)) adalah harga atau nilai yang akan dipertahankan oleh kontroler dan merupakan nilai yang ingin dicapai oleh sistem.
- Eror detector adalah komponen yang membandingkan nilai input dengan output dan menghasilkan signal eror.
Dalam sistem kontrol terdapat istilah-istilah yang sering dipakai dan memiliki arti tersendiri.
Untuk memudahkan pembahasan dalam sistem kontrol perlu didefinisikan sebuah terminologi dari
istilah-istilah tersebut yaitu:
Tabel 2. Istilah-istilah dalam Sistem Kontrol
Setpoint (Set Point): Nilai set dalam skala sistem kontrol dalam hal untuk memperoleh kondisi yang diinginkan
Nilai yang diinginkan (Desired Value):
Nilai yang diinginkan dan diperbolehkan berayun disekitar kondisi ideal
Nilai Kontrol (Kontrol Value):
Nilai dari kondisi kontrol pada kenyataannya dipelihara agar menjadi kondisi matap
Deviasi (Deviation): Perbedaan antara nilai setpoint dan nilai kontrol Offset (Offset): Ayunan dari deviasi
Sensor (Sensor): Elemen yang merespon secara langsung Media Terkontrol
(Kontrolled Medium):
Media yang dikontrol oleh sistem. Media yang terkontrol dalam contoh di atas adalah air dalam tangki
Kondisi Terkontrol (Kontrolled Condition):
Kondisi fisik dari media terkontrol. Dalam contoh diatas adalah level air dalam tangki
Kontroler (Kontroller): Perangkat yang menerima sinyal dari sensor dan
mengirimkan sinyal koreksi (atau pengontrolan) ke aktuator Aktuator (Actuator): Elemen yang menyetel perangkat terkontrol dalam hal
merespon sinyal dari kontroler Perangkat Terkontrol
(Kontrolled Device):
Elemen pengontrolan paling akhir didalam sebuah sistem kontrol, sperti pengontrolan klep atau variabel kecepatan pompa
2.2.2.
Jenis-Jenis Sistem Kontrol
a) Sistem kontrol manual (open loop kontrol)
Sistem kontrol manual adalah sistem pengontrolan yang masih menggunakan tenaga manusia
untuk melakukan proses pengontrolan. Pengontrlan secara manual biasanya digunakan pada proses yang
tidak banyak mengalami perubahan beban (load). Kelebihan sistem kontrol manual adalah lebih murah, karena tidak memerlukan rangkaian elektronik seperti sensor, mikrokontroler, dan elemen elektronik yang
12
hal ini berkaitan dengan sifat manusia yang akan merasa lelah, letih, bosan jika bekerja dalam jangkawaktu yang lama.
b) Sistem kontrol otomatis (closed loop kontrol)
Sistem kontrol otomatis adalah sistem pengontrolan yang dilakukan dengan menggunakan alat
atau rangkaian elektronik. Pengontrolan otomatis sering digunakan untuk mengontrol atau mengendalikan
proses yang sering mengalami perubahan beban. Proses pengontrolan dapat dilakukan lebih cepat dan
akurat dibandingkan dengan pengontrolan manual.
(Sutiarso, at al. 2001). Sistem kontrol umpan balik diintroduksi untuk mengatasi
keterbatan-keterbatasan yang ada pada sistem kontrol jaringan terbuka. Sistem kontrol umpan balik telah digunakan
untuk mengontrol pengendalian pada kebanyakan mesin-mesin industri. Kendaraan dengan pemandu
otomatis dilengkapi perlengkapan kontrol umpan balik (Suzuki, at al. 1986).
Kontroler otomatis membandingkan nilai sebenamya dari keluaran sistem secara keseluruhan
(plant) dengan mengacu pada masukan (nilai yang dikehendaki), menentukan penyimpangan, dan
menghasilkan sinyal kontrol yang akan mengurangi penyimpangan menjadi nol atau nilai yang kecil.
Bagaimana kontroler otomatis tersebut menghasilkan sinyal kontrol dinamakan aksi/control.
Dalam suatu sistem kontrol terhadap hubungan timbal balik antara komponen-komponen yang
membentuk suatu konfigurasi sistem yang memberikan suatu hasil atau respon yang dikehendaki.
Hubungan antara masukan dan keluaran akan menggambarkan bagaimana proses yang terjadi pada sinyal
masukan untuk menghasilkan variable sinyal keluaran.
Gunterus di dalam Tamrin (1997) mengemukakan, sistem kontrol proses adalah kumpulan dan
kerja alat-alat kontrol proses otomatis. Semua komponen yang membentuk sistem kontrol disebut
instrumentasi kontrol proses. Pembahasan tentang sistem kontrol terfokus pada kerja dan komponen
sistem. Aplikasi instrumen pengukuran dikelompokkan menjadi tiga, yaitu pemantauan proses dan
operasi, analisis teknik eksperimen, serta kontrol proses dan operasi (Doeblin di dalam Tamrin 1997).
Elemen pengukuran merupakan elernen yang penting dalam menentukan aksi dan respon sistem untuk
mengoreksi keadaan yang tidak dikehendaki.
Untuk menerjemahkan sinyal sistem pengukuran dari sensor menjadi sinyal yang dapat dimengerti
oleh kontrol dibutuhkan unit transduser. Pemilihan sinyal pengukuran ditentukan oleh jenis kontrol yang
akan dipakai. Sinyal dapat dianggap sebagai suatu fungsi waktu yang mewakili peubah fisik dalam suatu
sistem. Sistem pengukuran umumnya terdiri atas dua elemen, yaitu sensor dan tansduser, kedua unit ini
dapat berupa satu bagian yang utuh atau terpisah.
Sensor adalah alat yang mengubah variabel keluaran menjadi vaiabel yang sesuai, seperti
perpindahan, perubahann posisi, atau tegangan yang dapat digunakan untuk membandingkan keluaran
dengan sinyal masukan acuan. Elemen ini berada dalam jalur umpan balik dari sistem loop tertutup. Titik
"set" dari kontroler harus diubah ke masukan acuan dengan unit yang sama dengan sinyal umpan balik
dari sensor (Ogata, 1997).
13
kontroler otomatis dirnasukkan ke aktuator, seperti misalnya motor atau katup pneumatik, motorhidrolik,atau motor listrik.
2.3.
MOTOR LISTRIK
Motor listrik merupakan sebuah perangkat elektromagnetis yang mengubah energi listrik menjadi
energi mekanik. Energi mekanik ini digunakan untuk, misalnya, memutar impeller pompa, fan atau
blower, menggerakan kompresor, mengangkat bahan, dan lain-lain. Dalam memahami sebuah motor, penting untuk mengerti apa yang dimaksud dengan beban motor. Beban mengacu kepada keluaran tenaga
putar/torque sesuai dengan kecepatan yang diperlukan. Beban umumnya dapat dikategorikan ke dalam
tiga kelompok (BEE India, 2004):
Beban torque konstan adalah beban dimana permintaan keluaran energinya bervariasi dengan kecepatan operasinya namun torque nya tidak bervariasi. Contoh beban dengan torque konstan adalah conveyors, rotary kilns, dan pompa displacement konstan.
Beban dengan variabel torque adalah beban dengan torque yang bervariasi dengan kecepatan operasi. Contoh beban dengan variabel torque adalah pompa sentrifugal dan fan (torque
bervariasi sebagai kwadrat kecepatan).
Beban dengan energi konstan adalah beban dengan permintaan torque yang berubah dan berbanding terbalik dengan kecepatan. Contoh untuk beban dengan daya konstan adalah
peralatan-peralatan mesin.
Gambar 9. Diagram Jenis-jenis Motor Listrik
Motor arus searah, sebagaimana namanya, menggunakan arus langsung yang tidak
langsung/direct-unidirectional. Motor DC digunakan pada penggunaan khusus dimana diperlukan penyalaan torque yang tinggi atau percepatan yang tetap untuk kisaran kecepatan yang luas. Sebuah motor DC yang memiliki tiga komponen utama, yaitu:
Kutub medan. Secara sederhada digambarkan bahwa interaksi dua kutub magnet akan menyebabkan perputaran pada motor DC. Motor DC memiliki kutub medan yang stasioner dan
dinamo yang menggerakan bearing pada ruang diantara kutub medan. Motor DC sederhana
memiliki dua kutub medan: kutub utara dan kutub selatan. Garis magnetik energi membesar
melintasi bukaan diantara kutub-kutub dari utara ke selatan. Untuk motor yang lebih besar atau
lebih komplek terdapat satu atau lebih elektromagnet. Elektromagnet menerima listrik dari sumber
14
Dinamo. Bila arus masuk menuju dinamo, maka arus ini akan menjadi elektromagnet. Dinamo yang berbentuk silinder, dihubungkan ke as penggerak untuk menggerakan beban. Untuk kasus
motor DC yang kecil, dinamo berputar dalam medan magnet yang dibentuk oleh kutub-kutub,
sampai kutub utara dan selatan magnet berganti lokasi. Jika hal ini terjadi, arusnya berbalik untuk
merubah kutub-kutub utara dan selatan dinamo.
Commutator. Komponen ini terutama ditemukan dalam motor DC. Kegunaannya adalah untuk membalikan arah arus listrik dalam dinamo. Commutator juga membantu dalam transmisi arus antara dinamo dan sumber daya.
Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang tidak mempengaruhi
kualitas pasokan daya. Motor ini dapat dikendalikan dengan mengatur:
Tegangan dinamo: meningkatkan tegangan dinamo akan meningkatkan kecepatan
Arus medan: menurunkan arus medan akan meningkatkan kecepatan. Motor DC tersedia dalam banyak ukuran, namun penggunaannya pada umumnya dibatasi untuk beberapa penggunaan
berkecepatan rendah, penggunaan daya rendah hingga sedang seperti peralatan mesin dan rolling mills, sebab sering terjadi masalah dengan perubahan arah arus listrik mekanis pada ukuran yang lebih besar. Juga, motor tersebut dibatasi hanya untuk penggunaan di area yang bersih dan tidak
berbahaya sebab resiko percikan api pada sikatnya. Motor DC juga relatif mahal dibanding motor
AC.
Hubungan antara kecepatan, flux medan dan tegangan dinamo ditunjukkan dalam persamaan berikut:
Dimana:
E =gaya elektromagnetik yang dikembangkan pada terminal dinamo (volt)
Φ = flux medan yang berbanding lurus dengan arus medan
N = kecepatan dalam RPM (putaran per menit)
T = torqueelectromagnetik Ia = arus dinamo
K = konstanta persamaan
Menurut Cooper (1992), motor listrik sering digunakan sebagai tenaga penggerak dibandingkan
dengan jenis tenaga-tenaga yang lain karena :
1. Dapat disesuaikan : motor dapat digunakan di hampir setiap lokasi termasuk di dalam air.
2. Otomatis : motor dengan mudah dikontrol dengan alat otomatis.
3. Rapi : sebuah unit kecil memperkembangkan sejumlah kekuatan besar secara bersama-sama.
4. Dapat dipercaya : motor listrik secara khusus untuk pekerjaan jarang mengalami gangguan.
6. Efisien : motor listrik memiliki efisiensi hingga 95 %.
7. Perawatan mudah
8. Tenang : motor secara umum lebih tenang dari pada mesin yang di jalankan.
9. Aman : apabila dipasang dengan tepat, dipelihara, dan digunakan
15
Identifikasi kebutuhanAnalisa masalah, spesifikasi produk dan perancangan proyek
Perancangan konsep produk
Perancangan produk
Evalusai produk hasil rancangan
Dokumen untuk pembuatan produk
2.4.
PERANCANGAN (DESAIN)
Menurut Gieecke et al (2000) perancangan adalah cara untuk menghayati dan menciptakan gagasan baru yang kemudian mengkomunikasikannya kepada orang lain dengan cara yang lebih mudah.
Sedangkan Harsokoesoemo (1999) mendefinisikan perancangan sebagai kegiatan awal dari usaha
merealisasikan suatu produk yang keberadaannya dibutuhkan oleh masyarakat untuk meringankan
hidupnya. Perancangan itu sendiri terdiri dari serangkaian kegiatan yang berurutan. Kegiatan-kegiatan
dalam proses perancangan dinamakan fase perancangan. Berikut diagram alir perancangan secara umum:
16
III.
METODE PENELITIAN
3.1.
WAKTU DAN TEMPAT
Kegiatan Penelitian ini dilaksanakan mulai bulan Juni hingga Desember 2011 dan dilaksanakan di
laboratorium lapang Siswadhi Soepardjo (Leuwikopo), Departemen Teknik Mesin dan Biosistem,
Fakultas Teknologi Pertanian, Institut Pertanian Bogor.
3.2.
ALAT DAN BAHAN
Alat dan bahan yang digunakan pada penelitian ini antara lain : 1. Traktor roda empat, merk Yanmar tipe EF 435 T
2. Rangkaian sistem kontrol dengan menggunakan DT-51 Minimum System (Minsys) Ver. 3.3 yang berfungsi mengontrol gerakan sistem kendali.
3. Potensiometer linier dan absolute encoder sebagai sensor putaran. 4. Timbangan gaya, dan Multimeter
5. Elektro motor DC sebagai aktuator untuk menggerakkan kemudi, akselerasi, dan kopling. 6. Tachometer untuk mengukur rpm motor
7. Plat besi, plat strip, dan pipa silinder berbagai diameter dan ketebalan.
8. Laptop untuk merekam, menyimpan, mengolah data, dan merancang desain prototype.
9. Alat pendukung lainnya seperti; Power Supply, tang, obeng, bor listrik, las listrik, dan lain-lain.
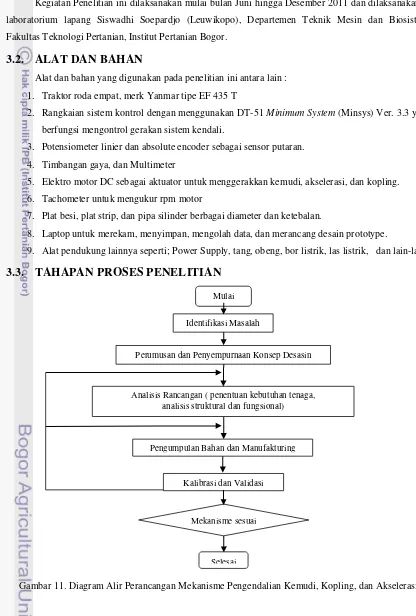
[image:30.595.93.509.157.773.2]3.3.
TAHAPAN PROSES PENELITIAN
Gambar 11. Diagram Alir Perancangan Mekanisme Pengendalian Kemudi, Kopling, dan Akselerasi Pengumpulan Bahan dan Manufakturing
Mulai
Identifikasi Masalah
Perumusan dan Penyempurnaan Konsep Desasin
Analisis Rancangan ( penentuan kebutuhan tenaga, analisis struktural dan fungsional)
Kalibrasi dan Validasi
17
3.3.1.
Identifikasi Masalah
Dalam mengoperasikan traktor secara manual, ada beberapa hal yang harus dilakukan, antara lain;
cara menghidupkan dan mematikan mesin, saat-saat yang tepat untuk menginjak kopling, memasukkan
gigi persneling, menginjak akselerasi, mengatur kemudi, menginjak rem, dan sebagainya. Perancangan
mekanik sistem pengendalian traktor secara otomatis tentunya harus mengikuti langkah-langkah
pengoperasian secara manual tersebut. Ini berarti bahwa setiap mekanisme yang akan dirancang perlu
memperhatikan waktu, lama pengoperasian, kecepatan, dan hal-hal lainnya.
Pada mekanisme kopling, pedal kopling harus ditekan dan ditahan tetap berada pada posisi
penekanan maksimum selama waktu yang dibutuhkan operator untuk memindahkan persneling. Setelah
itu pedal kopling harus dilepas perlahan-lahan hingga posisi terlepas total, tidak boleh dalam keadaan
setengah tertekan (menggantung kopling) karena selain berpotensi merusak komponen traktor juga sangat
berbahaya bagi operator. Waktu penahanan kopling sangat relative tergantung dari skill operator, umumnya waktu penahanan antara 5-10 detik.
Pada mekanisme kemudi dan akselerasi, traktor akan selalu dioperasikan lurus kecuali pada saat
tertentu seperti berbelok atau memutar mengikuti pola pengolahan tanah. Saat dioperasikan lurus, traktor
akan dilajukan dengan kecepatan konstan. Jika selama pengoperasian terjadi gangguan yang mengubah
sudut roda depan, kemudi akan diputar untuk mengembalikan traktor ke posisi semula sesegera mungkin.
Begitupun jika ada hambatan berupa guludan tanah atau sebagainya yang menghambat laju traktor, pedal
akselerasiakan ditekan untuk mempercepat laju traktor.
Masing-masing mekanisme perlu dilengkapi dengan aktuator pengendali, sistem transmisi daya,
sensor posisi, limitswitch, dan komponen lainnya yang nantinya akan dikendalikan secara otomatis dengan sebuah sistem program pengendalian.
3.3.2.
Perumusan dan Penyempurnaan Konsep desain
Pada tahap ini permasalahan yang ada diselesaikan melalui desain konseptual yang meliputi
beberapa alternatif desain. Dalam desain konseptual ini mulai menentukan komponen, mekanisme, dan
konfigurasi sistem pengendali dengan tetap mempertimbangkan batasan masalah. Selanjutnya dipilih
desain untuk masing-masing mekanisme yang paling baik untuk diproses ke tahap selanjutnya.
Mekanisme yang akan didesain diharapkan mampu menggerakkan masing-masing sistem
pengendalian traktor yaitu sistem kopling, sistem kemudi, dan sistem akselerasi baik dari segi ketepatan
waktu, kekuatan, dan durasi. Dikarenakan waktu pengoperasian yang berbeda, maka dalam
perancangannya masing-masing sistem didesain secara terpisah untuk kemudian disatukan dan
dikendalikan oleh suatu sistem pengendalian pada penelitian selanjutnya. Beberapa alternatif desain untuk
masing-masing mekanisme pengendalian dapat dilihat pada lampiran.
Dalam desain pengendalian kopling, mekanisme terdiri atas lengan tambahan kopling yang diikat
erat pada lengan kopling menggunakan klem, diujung lengan dimasukkan kabel penarik yang akan
digulung oleh puli yang terpasang pada poros motor DC. Saat kabel tergulung, lengan akan tertarik dan
pedal kopling akan tertekan hingga posisi maksimum. Setelah itu motor akan menahan lengan tetap pada
18
akan terulur karena kekuatan pegas yang mengembalikan lengan kopling secara perlahan ke posisinyasemula.
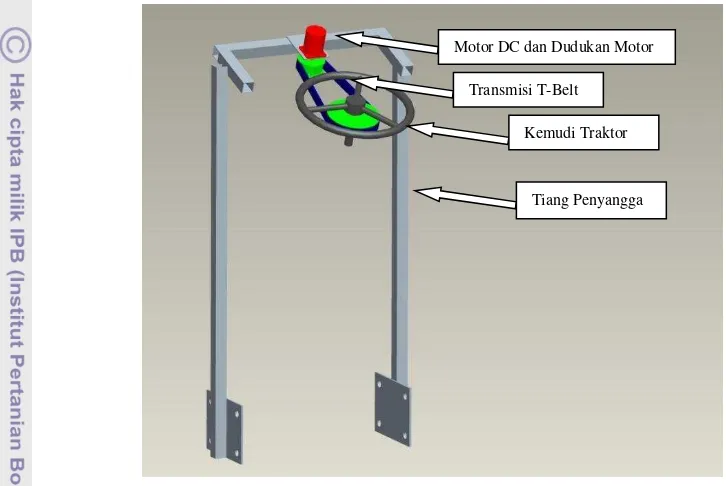
Mekanisme kemudi traktor menggunakan Timing Belt (T-Belt) sebagai transmisi daya dari motor DC ke kemudi. Motor dan puli T-belt dipasang pada bagian depan kemudi yang tidak mengganggu
pandangan ataupun kenyamanan operator. Motor diberi dudukan yang ditopang oleh tiang penyangga di
kiri dan kanan badan traktor. Pada bagian poros perputaran roda depan dipasang absolut encoder yang
berfungsi sebagai sensor posisi belok roda. Motor DC akan memutar kemudi ke kanan ataupun ke kiri
dan mengkondisikan agar roda selalu berada pada posisi lurus.
Pada mekanisme pengendalian akselerasi, ruang kerja yang terbatas sangat menyulitkan dalam
mengukur dan menentukan mekanisme yang sesuai. Sebagai solusinya, mekanisme pengendalian pedal
akselerasi dirancang serupa dengn mekanisme pengendalian kopling, mekanisme pengendali pedal
akselerasi menggunakan batang transmisi sebagai penyalur daya dari motor DC ke pedal akselerasi.
3.3.3.
Analisis Rancangan
Dalam tahap analisisrancanganini, akan ditentukan kebutuhan spesifik masing-masing komponen
yang digunakan untuk membuat mekanisme pengendalian. Analisis tersebut terdiri atas analisis
fungsional dan struktural yang dilengkapi dengan analisis teknik. Dalam analisis fungsional dilakukan
penentuan komponen-komponen penyusun yang sesuai dengan fungsi dan kegunaannya dalam sistem
kendali otomatis pada traktor. Sedangkan analisis struktural menentukan bahan dasar, bentuk, ukuran, dan
kekuatan yang tepat untuk setiap komponen mekanisme yang sesuai dengan kebutuhan yang telah
dianalisis melalui pendekatan-pendekatan teoritis.
Lebih spesifik lagi, dalam melakukan perancangan fungsional dan struktural perlu memperhatikan
berbagai hal antara lain; desain traktor yang meliputi posisi, bentuk, dan ukuran kemudi, pedal kopling,
dan pedal akselerasi, kebutuhan tenaga untuk memutar kemudi dan menginjak pedal akselerasi dan
kopling, panjang langkah dan lama waktu yang dibutuhkan saat menginjak pedal akselerasi dan kopling
ke posisi maksimum, kecepatan putar kemudi saat hendak membelokkan traktor, serta laju traktor saat
melakukan pengolahan tanah.
a. Perhitungan Kebutuhan Tenaga
Besarnya gaya yang dibutuhkan untuk memutar kemudi, menggerakan pedal kopling, atau pedal
akselerasi harus diukur terlebih dahulu, hal ini bertujuan agar kesalahan dalam memilih sumber tenaga
(dalam hal ini Motor Listrik DC) dapat dikurangi. Dengan mengukur kebutuhan gaya maka besarnya
sumber tenaga dapat dihitung. Pengukuran gaya ini dilakukan dengan menggunakan timbangan.
Pengukuran dilakukan pada kebutuhan gaya pengoperasian maksimum.
Kebutuhan gaya maksimum untuk menggerakkan kopling dan pedal akselerasi adalah pada saat
melakukan penekanan pada pedal kopling dan pedal akselerasi. Kebutuhan tenaga maksimum untuk
memutar kemudi yaitu pada saat lingkaran kemudi traktor diputar dari keadaan maksimum kiri ke kanan
19
Perhitungan kebutuhan tenagan maksimum yang dibutuhkan, digunakan rumus berikut:
Dimana :
P = daya (Watt)
T = Torsi (N.m)
F = Gaya (N)
l = panjang lengan (m)
ω = kecepatan sudut (rpm)
r = jari-jari (m)
N = rotasi per menit
Data hasil dari penentuan kebutuhan tenaga tersebut menjadi referensi untuk memilih motor
sebagai tenaga penggerak. Tenaga yang harus dimiliki motor agar dapat memutar kemudi ataupun
menekan pedal akselerasi dan kopling harus lebih besar dari kebutuhan tenaga hasil pengukuran.
b. Analisis Fungsional dan Struktural
Setelah sumber tenaga ditentukan, langkah berikutnya adalah melakukan analisis fungsional dan
struktural masing-masing komponen mekanisme yang akan didesain. Analisis struktural dan fungsional
untuk masing-masing komponen dari ketiga sistem tersebut akan dijelaskan lebih rinci pada bab IV.
3.3.4
Pengumpulan Bahan dan Manufakturing
Tahap terakhir dari penentuan mekanisme pengendalian kemudi adalah pengumpulan bahan,
pemasangan dan pengaplikasian alat. Pemilihan jenis bahan yang akan digunakan disesuaikan dengan
hasil analisis fungsional dan struktural untuk kemudian dirangkai sesuai dengan hasil analisis rancangan
tersebut.
3.3.5
Kalibrasi dan Validasi
Kalibrasi dan validasi dilakukan dengan menggunakan sistem kontrol yang dirangkai sedemikian
hingga masing-masing mekanisme dapat diuji secara terpisah maupun diuji secara menyeluruh tanpa
perlu membongkar rangkaiannya. Kalibrasi pada umumnya merupakan proses untuk menyesuaikan
keluaran atau indikasi dari suatu perangkat pengukuran agar sesuai dengan besaran dari standar yang
digunakan dalam akurasi tertentu. Kalibrasi perlu dilakukan sebelum dilakukan pengujian statis sistem.
Berikut beberapa hal yang akan dikalibrasi pada tahap ini:
- Pengukuran dan pengkonversian besaran jarak terhadap besaran sudut putar.
Perpindahan posisi pada mekanisme yang dirancang terdapat pada perpindahan pedal kopling dan
pedal akselerasi (bergerak dari atas ke bawah dan sebaliknya). Jarak yang ditempuh dan besarnya
sudut putar motor listrik saat digerakkan dari posisi minimum ke posisi maksimum diukur kemudian
dikonversi sehingga didapat persamaan nilai keduanya. Selanjutnya persamaan ini dijadikan tolak
20
- Pengukuran dan pengkonversian besaran sudut putar terhadap nilai keluaran sensor.Terdapat dua jenis sensor sudut yang digunakan pada penelitian ini. Absolute rotary encoder
digunakan pada sistem pengendali kemudi dan potensiometer linier digunakan pada sistem pengendali
akselerasi. Pada sistem pengendali kemudi, perubahan sudut roda depan traktor pada saat dibelokkan
akan mempengaruhi nilai keluaran dari absolute rotary encoder. Dan pada sistem pengendali akselerasi, perputaran puli motor yang membentuk sudut tertentu terhadap porosnya akan
mempengaruhi nilai hambatan potensiometer. Setiap perubahan sudut dan nilai keluaran sensor diukur
dan dikonversi untuk mendapatkan persamaan hubungan keduanya. Hasil persamaan yang didapat
menjadi tolak ukur pengkalibrasian sudut putar puli motor pengendali akselerasi, sudut belok roda
depan traktor, dan nilai keluaran sensor pada masing-masing sistem pengendalian.
Setelah kalibrasi dilakukan, langkah selanjutnya adalah validasi yaitu proses pembuktian dari hasil
kalibrasi. Pada proses ini, sistem kontrol menetapkan suatu nilai posisi untuk masing-masing mekanisme
kemudi, akselerasi, dan kopling berdasarkan persamaan yang didapat pada uji kalibrasi. Kemudian sistem
kontrol akan menggerakkan masing-masing mekanisme secara otomatis hingga berhenti. Jika posisi
berhentinya sesuai dengan posisi yang ditetapkan sebelumnya, maka uji validasi dinyatakan berhasil.
Setelah kalibrasi dan validasi dilakukan, langkah terakhir dalam penelitian ini adalah melakukan
pengujian statis pada mekanisme hasil perancangan. Pengujian dilakukan dengan menggerakkan
semuamekanisme pengendali secara terpisah maupun secara bersamaan untuk memastikan apakah
keseluruhan rancangan yang telah dipasang sudah sesuai dengan perintah yang dimasukkan ke sistem
21
IV.
ANALISIS STRUKTURAL DAN FUNGSIONAL
Tahapan analisis rancangan merupakan tahap yang paling utama karena di tahap inilah kebutuhan
spesifik masing-masing komponen ditentukan. Dengan mengacu pada hasil konsep desain yang telah
disempurnakan, masing-masing komponen mekanismeakan dianalisis fungsi dan strukturnya guna
mendapatkan hasil perancangan yang sesuai. Perhitungan kebutuhan daya untuk masing-masing
mekanisme diuraikan dalam lampiran 1. Berdasarkan hasil perhitungn kebutuhan tenaga, analisis
masing-masing komponen secara spesifik diuraikan sebagai berikut.
4.1.
MEKANISME KOPLING
Sistem ini berfungsi untuk mengontrol pedal kopling traktor. Sistem kontrol dirancang untuk
mengontrol pergerakan kopling agar sesuai dengan waktu dan kecepatan pergerakan yang dapat
diatur.Pengontrolan dilakukan dengan menggunakan motor DC yang dikontrol oleh mikrokontroler
melalui perangkat H-Bridge. Pedal kopling dikontrol untuk mencapai dua kondisi, yaitu kondisi minimum
dan maksimum penekanan.
Gambar 12. Desain Mekanisme Pengendali Kopling
4.1.1.
Pedal Kopling
a. Fungsional
Kopling berfungsi untuk menghubungkan dan melepaskan kontak antara motor penggerak dengan
transmisi traktor. Dalam pengoperasiannya, pedal kopling harus selalu dalam posisi penekanan
maksimum selama waktu yang diperlukan operator untuk memindahkan persneling, karena apabila pedal
kopling diinjak, hubungan motor dengan transmisi terputus sehingga tidak ada tenaga yang disalurkan
dari motor ke batang transmisi. Dan sebaliknya apabila pedal kopling dilepas, tenaga akan disalurkan ke
batang transmisi sehingga roda traktor dapat berputar.
b. Struktural
Kopling sudah menjadi bagian dari traktor yg digunakan. Pedal kopling terletak pada bagian kaki
sebelah kiri pengemudi, dengan struktur pedal kopling tegak lurus terhadap lengan sehingga torsi yang
dihasilkan saat menginjak pedal kopling bernilai maksimal.
Klem
Lengan Kopling
Kabel penarik
Puli
22
Panjang lengan kopling adalah 26 cm, dengan sudut yg terbentuk antara posisi minimum danmaksimum penekanan sebesar 18°. Lengan kopling berupa silinder baja pejal berdiameter 2cm dan
bagian pedalnya terbuat dari plat baja dengan dimensi 40mmx50mmx5mm.
4.1.2.
Lengan Kopling
a. Fungsional
Lengan kopling berfungsi menghubungkan antara pedal kopling dan poros putarnya. Setelah
dilakukan pengukuran, didapatkan nilai gaya yang dibutuhkan untuk menekan pedal kopling sebesar 24
kgf. Kebutuhan gaya yang sangat besar tidak memungkinkan tersedianya sumber tenaga (motor DC) yang
mampu menahan posisi maksimum penekanan koplimg dengan gaya sebesar itu, sehingga diperlukan
perpanjangan tuas kopling (lengan tambahan). Lengan tambahan ini berfungsi untuk memperkecil
kebutuhan gaya penggerak lengan kopling dengan besaran tenaga yang dihasilkan tetap sama. b. Struktural
Desain struktural lengan tambahan pada kopling terlihat pada gambar 12. Lengan tambahan
kopling terbuat dari pipa silinder baja berdiameter 1 inch, dan panjang total 76cm. Lengan kopling perlu
dibengkokkan kearah luar traktor agar tidak membentur badan traktor maupun komponen lain saat
pengoperasian. Semakin panjang lengan, semakin kecil kebutuhan gaya untuk menekan kopling yang
semula adalah 24 kgf dapat diperkecil menjadi 8.21 kgf.
Pada ujung lengan tambahan yang berbentuk pipa silinder dimasukkan sebuah baut berdiameter
sama dengan diameter dalam lengan tambahan kopling, kemudian keduanya dilubangi secara vertikal
sebagai tempat memasukkan kabel penarik. Bagian kepala baut dimilling menggunakan bor berdiameter 5mm hingga menembus lubang tempat kabel terpasang. Dari lubang hasil pengeboran dimasukkan sebuat
baut kecil yang akan menekan dan menghimpit kabel penarik sehingga posisi kabel akan fix dan tidak
berubah saat mekanisme dioperasikan.
4.1.3.
Klem
a. Fungsional
Klem berfungsi untuk mengikat lengan kopling dan lengan tambahannya agar tidak bergeser.
Struktur kedua lengan yang berbentuk silinder sangat memungkinkan terjadi pergeseran posisi ataupun
puntiran antar keduanya dikarenakan bidang kontak antara dua silinder sangat kecil.Untuk itu, klem
dipastikan mengikat kuat agar hal tersebut tidak terjadi. Terdapat tiga buah klem yang dipasang
masing-masing pada bagian pangkal, tengah, dan ujung lengan kopling.Lebar masing-masing-masing-masing klem adalah 3cm. b. Struktural
Klem terbuat dari plat setebal 2mm dan lebar 2cm yang ditekuk menyerupai huruf U terbalik.
Klem dipasang di tiga titik pada bagian pangkal lengan kopling.Bagian bawah klem dilubangi sebagai
tempat memasukkan mur dan baut sehingga klem benar-benar mengunci posisi kedua lengan agar tidak
23
Gambar 13. Desain Bentuk Klem4.1.4.
Puli dan Kabel Penarik
a. Fungsional
Kabel penarik yang dipasang pada ujung lengan berfungsi untuk menarik lengan kopling hingga
ke titik maksimum penekanan. Sedangkan puli yang dipasang pada poros motor berfungsi menggulung
kabel selama motor dioperasikan. Ketegangan kabel diatur sehingga pada saat puli diputar, kabel akan
langsung tergulung tanpa ada jeda waktu. b. Struktural
Puli dibuat dari bahan PVC karena selain harganya lebih murah, bahan PVC sangat mudah
dibentuk dan disesuaikan dengan kebutuhan, kuat menahan tekanan dan panas yang timbul selama
pengoperasian sistem. Sedangkan kabel penarik menggunakan tali kopling sepeda motor yang umum
dijual di pasaran. Desain puli terlihat pada gambar 14. Puli pada mekanisme pengendali kopling
ditempelkan langsung pada poros motor dengan diameter poros puli sama dengan diameter poros motor,
dan dengan menambahkan sebuah baut sebagai pasak agar ikatan puli dan poros motor tidak bergeser.
Dari hasil analisis perhitungan diketahui panjang stroke kopling sebesar 22 cm, dengan mengatur kecepatan putar puli menjadi 1 rps maka didapat diameter puli adalah 7cm.
24
4.1.5.
Dudukan Motor
a. Fungsional
Dudukan motor berfungsi sebagai tempat meletakkan sekaligus menempelkan motor DC ke badan
traktor. Batasan masalah penelitian yang tidak mengizinkan untuk memodifikasi traktor, maka dudukan
motor didesain menggunakan lubang baut yang tersedia pada badan traktor.
Dudukan motor terdiri atas dua bagian. Bagian pertama berupa pipa kolom segi empat yang
memiliki dua lubang baut untuk menempelkannya pada badan traktor, dan bagian kedua berupa plat
setebal 5mm sebagai tempat meletakkan motor DC. b. Struktural
Pipa kolom yang digunakan berdimensi 60cmx4cmx2cm terbuat dari bahan baja yang cukup kuat
menahan beban berat motor.Pada bagian pangkalnya terdapat dua lubang baut yang jarak keduanya
dengan lubang baut yang ada pada badan traktor. Pada bagian ujungnya juga diberi dua lubang baut
sebagai tempat menempelkan plat dudukan. Plat dudukan traktor berdimensi 20cmx30cm. pada beberapa
bagian plat diberi lubang sebagai tempat pemasangan motor.
4.1.6.
Motor
a. Fungsional
Motor DC adalah sumber tenaga penggerak lengan kopling.Dalam pengoperasian traktor secara
manual kopling harus ditekan selama waktu yang dibutuhkan operator untuk memindahkan persneling.Ini
berarti bahwa motor DC selain berfungsi menggerakkan kopling juga harus mampu menahannya selama
waktu tersebut. b. Struktural
Berdasarkan hasil analisis perhitungan pada lampiran 2, maka dipilih motor DC 24V, 60 RPM,
dan daya 35 Watt. Motor DC yang dipilih memiliki transmisi wormgear yang berfungsi mencegah poros motor berputar akibat tarikan dari gaya pegas kopling saat arus listrik ke motor DC diputus. Dengan
[image:38.595.237.411.569.723.2]adanya worm gear ini, posisi lengan kopling dapat ditahan pada kondisi maksimum penekanan selama mungkin.
25
4.2
MEKANISME KEMUDI
Sistem ini berfungsi untuk mengontrol gerakan roda depan dengan mengatur putaran stir traktor.
Pengontrolan putaran stir dilakukan dengan menggunakan motor DC yang dikontrol oleh mikrokontroler
melalui perangkat H-Bridge agar bergerak sesuai dengan yang diperintahkan dengan kecepatan putar
yang dapat diatur. Perubahan sudut putar pada roda depan dibaca dengan menggunakan absolute encoder
[image:39.595.110.473.190.433.2]dan menjadi feedback ke mikrokontroler.
Gambar 16. Desain Mekanisme Pengendali Kemudi
4.2.1.
Kemudi
a. Fungsional
Kemudi traktor berfungsi memutar roda penggerak sehingga arah pergerakan maju dan mundur
traktor dapat dikendalikan.Kecepatan putar kemudi diukur saat membelokkan roda penggerak dari posisi
belok maksimum kanan ke posisi belok maksimum kiri. Nilai kecepatan kemudi dan besarnya gaya yang
dibutuhkan menjadikan acuan perhitungan kebutuhan daya dan sistem transmisi yang digunakan. b. Struktural
Kemudi traktor berada di depan kursi pengemudi. Diameter kemudi sebesar 30 cm. dengan
kemiringan 45°.
4.2.2.
Sistem Transmisi Sabuk Bergilir (T-Belt)
a. Fungsional
Mekanisme pengontrol kemudi dilakukan dengan menggunakan motor DC dan sistem transmisi timing belt. Adapun mekanismenya dapat dilihat pada Gambar 17. Mekanisme timing belt dipilih karenaperbandingan transmisi daya atau putaran sumber tenaga dengan komponen yang digerakan besarnya tetap, hal ini dikarenakan T-Belt dapat melakukan transmisi seperti pada rantai sehingga tidak terjadi slip saat putaran ber