RANCANG BANGUN SISTEM PENGENDALI JARAK JAUH
PADA TRAKTOR RODA EMPAT DENGAN PEMANDU
CITRA DARI KAMERA
SETIA TRIANTO
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Rancang Bangun Sistem Pengendali Jarak Jauh pada Traktor Roda Empat dengan Pemandu Citra dari Kamera adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, Januari 2014 Setia Trianto NIM F14090109
ABSTRAK
SETIA TRIANTO. Rancang Bangun Sistem Pengendali Jarak Jauh pada Traktor Roda Empat dengan Pemandu Citra dari Kamera. Dibimbing oleh I DEWA MADE SUBRATA dan RADITE PRAEKO AGUS SETIAWAN.
Traktor roda empat pengendali jarak jauh merupakan traktor konvensional yang telah dimodifikasi dengan menambahkan sistem remote pengendali jarak jauh berupa modul antarmuka SPC wireless gamepad serta kamera nirkabel sebagai pemandu citra bagi operator yang mengendalikannya. Tujuan dari penelitian ini ialah melakukan modifikasi sistem pengendalian serta menambahkan kamera nirkabel pada traktor roda empat mini Kubota B6100. Pada penelitian ini, daya minimum untuk steering ialah sebesar 22.87 Watt, tuas akselerasi ialah 0.31 Watt, sedangkan untuk tuas kopling ialah sebesar 17.54 Watt. Pengendali kopling pada penelitian bertujuan untuk menghentikan laju traktor di lahan dan memudahkan untuk pengendalian transmisi. Modul remote control digunakan untuk mengendalikan traktor dan menerima transmisi data video dari kamera nirkabel pada traktor. Kotak controller pada traktor digunakan untuk menerima perintah dari remote control pada operator dan terdiri dari komponen-komponen pendukung. Fungsi kamera nirkabel pada penelitian ini ialah untuk membantu operator dalam memantau kondisi di depan traktor dan menghindari halangan.
Kata kunci: Traktor roda empat, modul antarmuka SPC wireless gamepad, kamera nirkabel.
ABSTRACT
SETIA TRIANTO. Design of Wireless Controller System on Four Wheels Drive Tractor Equipped with Image Guiding Techology of Wireless Camera. Supervised by I DEWA MADE SUBRATA and RADITE PRAEKO AGUS SETIAWAN.
A wireless remote controlled tractor is a conventional tractor which is modified and added with a wireless remote controller such as SPC wireless gamepad interface module and wireless camera as an image guide for the operator. This research aimed at modifying the wireless remote controlled system and attaching a wireless camera on mini four wheels drive tractor Kubota B6100. In this research, the minimum power requirements were 22.87 Watts, 0.31 Watts, and 17.54 Watts for steering, acceleration, and clutch, respectively. The clutch controller functions as a brake and a transmission aid. The remote control module helps the operator control the tractor and enables him to receive video data from the wireless camera attached to the tractor. The controller box, consisting of several supporting components, functions to receive command from the remote control. The wireless camera provides the operator with some guides to monitor conditions in front of the tractor and to avoid obstacles.
Keywords: Four wheels drive tractor, SPC wireless gamepad interface module, wireless camera.
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknologi Pertanian
pada
Departemen Teknik Mesin dan Biosistem
RANCANG BANGUN SISTEM PENGENDALI JARAK JAUH
PADA TRAKTOR RODA EMPAT DENGAN PEMANDU
CITRA DARI KAMERA
SETIA TRIANTO
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
Judul Skripsi : Rancang Bangun Sistem Pengendali Jarak Jauh pada Traktor Roda Empat dengan Pemandu Citra dari Kamera
Nama : Setia Trianto NIM : F14090109
Disetujui oleh
Dr Ir I Dewa Made Subrata, MAgr Pembimbing I
Dr Ir Radite Praeko Agus S, MAgr Pembimbing II
Diketahui oleh
Dr Ir Desrial, MEng Ketua Departemen
PRAKATA
Puji syukur penulis panjatkan kepada Tuhan Yesus Kristus atas segala berkat dan karunianya sehingga karya ilmiah ini berhasil diselesaikan dengan baik. Tema yang dipilih dalam penelitian yang dilaksanakan sejak bulan Februari 2013 ini ialah traktor berpengendalian nirkabel, dengan judul Rancang Bangun Sistem Pengendali Jarak Jauh pada Traktor Roda Empat dengan Pemandu Citra dari Kamera.
Terima kasih penulis ucapkan kepada Bapak Dr Ir I Dewa Made Subrata, M.Agr selaku dosen pembimbing I dan Bapak Dr Ir Radite Praeko Agus Setiawan, M.Agr selaku pembimbing II. Ungkapan terima kasih juga sampaikan kepada mendiang ayah (Alm. Ralin. Diris) yang selalu memberikan motivasi sejak kecil kepada penulis. Terima kasih juga kepada ibu tercinta (Yulinawati) yang selalu memberi arahan, nasehat dan doa kepada penulis serta kepada saudara penulis (Distersianto, Pristersianto, dan Asih Setia Purwati) yang selalu memberi doa dan harapan. Terima kasih juga penulis sampaikan kepada PT. Pupuk Kaltim yang telah memberikan beasiswa kepada penulis selama menempuh pendidikan. Terima kasih juga penulis ucapkan kepada petugas dan teman-teman dari Laboratorium Instrumentasi dan Kontrol juga kepada teman-teman LaboratoriumTeknik Mesin dan Otomasi serta kepada petugas di Bengkel Lapangan Siswadhi Soepardjo di Leuwikopo. Terima kasih juga kepada yang terkasih (Wahyu Susi Kaniawati) yang senantiasa menemani dan memdampingi penulis dalam menyelesaikan penelitian hingga dapat menyelesaikan penulisan karya ilmiah ini, juga kepada teman-teman sejurusan AE 46 yang memberikan bantuan dan dukungannya.
Semoga karya ilmiah ini bermanfaat.
Bogor, Januari 2014 Setia Trianto
DAFTAR ISI
DAFTAR TABEL x DAFTAR GAMBAR x DAFTAR LAMPIRAN xi PENDAHULUAN 1 Latar Belakang 1 Perumusan Masalah 2 Tujuan Penelitian 2 Manfaat Penelitian 2Ruang Lingkup Penelitian 2
TINJAUAN PUSTAKA 3
METODE 5
Bahan 5
Alat 5
Prosedur Penelitian 5
HASIL DAN PEMBAHASAN 14
Pembuatan Sistem Pengendali 14
Pengujian Lapangan 21
SIMPULAN DAN SARAN 24
Simpulan 24
Saran 25
DAFTAR PUSTAKA 25
LAMPIRAN 27
DAFTAR TABEL
1 Perbandingan modifikasi 12
2 Pilihan mode operasi pada gamepad 17
3 Kondisi sistem pengendali 21
4 Waktu respon penekanan kopling 21
5 Uji pandangan melalui kamera nirkabel 22
DAFTAR GAMBAR
1 SPC wireless gamepad interface 4
2 Mekanisme tuas kopling 7
3 Mekanisme pengendali steering 8
4 Mekanisme pengendali akselerasi 8
5 Kamera nirkabel 2.4 GHz 9
6 Pembidik dan kamera nirkabel 11
7 Pembuatan lintasan 20 meter 12
8 Diagram alir pelaksanaan penelitian 13
9 Rangkaian power supply 14
10 Modul antarmuka transmitter SPC wireless gamepad 15
11 Bagian-bagian tombol gamepad 15
12 LCD TV 7 inci merek Hollywood 15
13 Video receiver 16
14 Rangkaian modul transmitter (remote control) 16
15 Cara pengaturan mode operasi 17
16 Tombol tuas kendali 18
17 Modul receiver SPC wireless gamepad interface 18
18 Modul EMS 30 A H-Bridge 19
19 Rangkaian modul receiver (RX) pada kotak controller 19
20 Mekanisme pengendali kopling 20
21 Hasil rancangan sistem pengendali jarak jauh pada traktor dan
dilengkapi kamera nirkabel 20
22 Uji jangkauan pengendali dan kamera nirkabel 21 23 Grafik perbandingan jangkauan SPC wireless gamepad dengan kamera
nirkabel terhadap posisi traktor 22
24 Pengamatan kondisi di depan traktor 23
25 Pembuatan baseline setengah lingkaran 24
DAFTAR LAMPIRAN
1 Spesifikasi traktor mini 27
2 Sirkuit modul SPC wireless gamepad interface 28 3 Hubungan SPC wireless gamepad interface dengan EMS 30A H-Bridge 29
4 Pembuatan mekanisme pengendali kopling 31
5 Spesifikasi kamera nirkabel dengan merek "Wireless Surveillance
System" dan contoh pemasangannya 32
6 Uji lurus Traktor nirkabel 33
7 Uji traktor nirkabel mengikuti baseline setengah lingkaran (diameter 5
1
PENDAHULUAN
Latar Belakang
Penerapan teknologi sistem kontrol otomatis di bidang pertanian ialah agar tercapainya pertanian yang presisi. Selain itu, tujuan lainnya ialah sebagai alat bantu bagi operator untuk mengurangi tingkat kelelahan dan meningkatkan efisiensi dalam penggunaan energi sehingga meningkatkan produktivitas pertanian. Salah satu alat bantu tersebut ialah traktor yang mampu dikendalikan dari jarak jauh sehingga operator tidak perlu mengendarainya secara langsung di lapangan.
Penggunaan kontrol otomatis dalam berbagai bidang saat ini ialah karena memiliki banyak keuntungan jika dibandingkan dengan sistem kontrol yang manual. Salah satu keuntungan dari penggunaan kontrol otomatis ialah kecepatan, keakuratan dan kehematan dalam penggunaan energi yang lebih baik. Semakin berkembangnya ilmu mekatronika, yaitu gabungan ilmu teknik elektronika, teknik kelistrikan, teknik komputer dan teknik kontrol dengan teknik mesin maka akan meningkat peranan pentingnya di dalam bidang desain, bidang produksi dan bidang perawatan dari proses maupun produksi yang kompleks (Bolton 1996).
Menurut Wardhana (2006) menyebutkan bahwa sistem kendali telah berkembang dengan sangat pesat, berbagai macam metode pengendalian telah diciptakan dan dikembangkan, tetapi pengendalian sistem jarak jauh masih kurang. Oleh karena itu, diperlukan adanya pengembangan sistem kendali secara jarak jauh. Sistem kendali mobil robot akan memudahkan dan meningkatkan prestasi kerja mesin, serta membantu manusia untuk menggantikan sebagian tugasnya.
Goering (1986) menyebutkan bahwa traktor-traktor pertanian merupakan sebuah elemen kunci dalam mekanisasi pertanian. Traktor mampu menyediakan tenaga untuk kegiatan pengolahan tanah, kegiatan penanaman, penyiangan rumput maupun kegiatan pemanenan. Tiga tujuan utama dari penerapan mekanisasi dalam pertanian ialah mengurangi jumlah pekerja, meningkatkan produktivitas pekerja, serta meningkatkan efisiensi waktu pekerjaan.
Salah satu tujuan penggunaan sistem navigasi otomatis pada traktor ialah mengurangi kelelahan operator serta meningkatkan ketelitian dan produktivitas operasi traktor dalam kegiatan budidaya pertanian. Oleh karena itu, sudah saatnya di Indonesia dilakukan penelitian yang berkaitan dengan pertanian yang presisi, dimana otomasi penggunaan traktor serta alat dan mesin pertanian sangat diperlukan (Desrial et al. 2010).
Penerapan sistem kontrol otomatis dan pengendalian jarak jauh pada traktor di masa yang akan datang akan sangat diperlukan. Oleh karena itu, penyempurnaan tahap demi tahap perlu dilakukan untuk terciptanya traktor yang canggih, perawatan yang mudah, harga yang terjangkau, serta mudah dalam penggunaan. Penelitian ini merupakan langkah pengembangan dari traktor pintar yang sudah ada, yaitu traktor dengan sistem pegendalian jarak jauh dan menggunaan SPC wireless gamepad interface dengan memanfaatkan jaringan nirkabel sebagai komunikasi data antartraktor dengan operator pengendalinya. Akan tetapi, traktor pada penelitian sebelumnya masih belum dilengkapi dengan pengontrol kopling dan belum dilengkapi dengan monitor pada pengendali dan
2
kamera nirkabel yang dipasang pada traktor yang fungsinya untuk memudahkan operator dalam mengendalikan traktor tersebut. Harapan dari penelitian ini ialah terciptanya traktor pintar yang mampu mengontrol kopling serta memudahkan pengguna dalam mengendalikan traktor tersebut karena dilengkapi monitor dan kamera nirkabel.
Perumusan Masalah
Traktor berpengendali jarak jauh dan didukung oleh pemandu citra dari kamera merupakan salah satu langkah pengembangan traktor pintar yang dapat meningkatkan produktivitas pertanian serta demi tercapainya pertanian yang presisi. Apakah traktor biasa dapat diubah menjadi traktor yang dapat dikendalikan dari jarak jauh? Apakah kondisi di depan traktor dapat terpantau oleh operator dari jarak jauh? Untuk menjawab pertanyaan tersebut maka dilakukan pembuatan prototipe traktor yang dapat dikendalikan secara jarak jauh serta kondisi di depan traktor dapat dipantau oleh operator melalui monitor dan kamera nirkabel.
Tujuan Penelitian
Tujuan dari penelitian ini adalah untuk memodifikasi mekanisme pengedalian seperti steering (roda kemudi), gas dan kopling pada traktor mini roda empat Kubota B6100 serta memasangkan perangkat pemandu citra dengan kamera nirkabel dan melakukan pengujian seperti uji kondisi komponen pendukung sistem pengendali, uji statis penekanan kopling, uji jangkauan maksimum pengendali dan kamera nirkabel, uji jarak objek terhadap traktor melalui kamera nirkabel, uji simpangan traktor baik uji mengikuti baseline lurus maupun belok.
Manfaat Penelitian
Manfaat dari penelitian ini adalah sebagai salah satu langkah dalam pengembangan traktor pintar di Indonesia dengan memodifikasi traktor biasa agar dapat dikendalikan dari jarak jauh yang juga dilengkapi pemandu citra dari kamera nirkabel. Manfaat lainnya dari penelitian ini ialah sebagai motivasi bagi generasi muda, baik di tingkat mancanegara dan terkhusus di Indonesia agar tertarik dalam mengembangkan peralatan pertanian yang lebih canggih, sehingga harapannya Indonesia dapat mengulang kembali kejayaan dalam swasembada pangan.
Ruang Lingkup Penelitian
Ruang lingkup dari penelitian ini adalah melakukan modifikasi traktor Kubota B6100 pada sistem pengendali traktor terutama pada bagian kopling, memodifikasi remote pengendali, melakukan penyusunan ulang rangkaian elektronik, memasangkan perangkat pemandu citra dan melakukan pengujian sistem pengendalian serta pengujian prototipe di lapangan.
3
TINJAUAN PUSTAKA
Penelitian tentang aplikasi sistem navigasi otomatis pada traktor pertanian menjadi salah satu topik penelitian yang penting pada dua dekade terakhir, khususnya pada negara-negara maju dimana isu tentang aplikasi “Precision Farming (PF)”. Keterbatasan tenaga kerja dan lingkungan sudah menjadi hal yang harus dipertimbangkan (Desrial et al. 2010).
Traktor yang memiliki kemampuan untuk menghindari rintangan pada lahan kerja berupa pohon, batu, lubang, pematang, manusia dan benda lainnya yang tidak mungkin dilewati oleh traktor yang dioperasikan oleh traktor tanpa awak (unmanned tractor) berbasis Global Positioning System (GPS) ialah sangat diperlukan. Sistem pengindera lingkungan sekitar menggunakan kamera Charge Coupled Device (CCD) memungkinkan untuk mendeteksi rintangan yang berada di depan traktor secara realtime, namun dengan kemungkinan beragamnya objek yang ditangkap oleh kamera, pengolahan citra menjadi kompleks dan membutuhkan waktu yang relatif lama sehingga tidak cocok untuk diaplikasikan (Ahmad et al. 2011).
Sistem otomasi traktor dapat mengurangi kelelahan operator dan memiliki peranan penting pada abad mendatang, terutama sistem kendaraan yang menghasilkan kerja lebih efisien dan mengurangi biaya produksi (Annas 2012).
Sofana (2008) menyebutkan bahwa jaringan nirkabel adalah jaringan tanpa kabel yang menggunakan media penghantar gelombang radio atau cahaya inframerah.
Menurut Ariyus dan Rum (2008), tujuan utama dari komunikasi data adalah untuk menukar informasi antara dua perantara.
1. Data adalah sebuah gambaran dari kenyataan, konsep atau instruksi dalam bentuk formal yang sesuai untuk komunikasi, interpretasi atau proses oleh manusia atau oleh peralatan otomatis.
2. Informasi adalah pengertian yang diperuntukan bagi data dengan persetujuan pemakaian data tersebut.
Menurut Annas (2012), roda kemudi (steering) dapat bergerak jika torsi motor dan puli di poros roda kemudi lebih besar dari torsi roda kemudi. Artinya besar torsi motor setelah perbandingan puli harus lebih besar dari torsi maksimum saat pengujian.
Menurut Priyadi (2012), rancangan mekanisme pengendali tuas akselerasi menggunakan mekanisme batang hubung sebaiknya ditarik menggunakan tali yang dihubungkan dengan motor DC yang memiliki torsi lebih besar dari torsi tuas akselerasi. Hal tersebut dibuat agar pengendalian mekanisme tuas akselerasi dapat dilakukan melalui putaran motor DC.
SPC (Smart Pheripheral Controller) wireless gamepad interface merupakan modul antarmuka antara manusia dengan peralatan elektronika, robot, maupun mesin-mesin listrik lainnya. Sistem ini terdiri dari gamepad biasa yang digunakan pada console PlayStation®, sebuah modul berbasis mikrokontroler (modul TX) yang digunakan untuk membaca data-data penekanan pada tombol-tombol digital dan joystick analog pada gamepad dan memancarkan data-data tersebut pada Radio Frequency (RF). Modul yang berbasis mikrokontroler (modul RX) yang digunakan untuk menerima data-data yang dipancarkan tersebut dan
4
menerjemahkannya menjadi sinyal-sinyal digital dan Pulse Width Modulation (PWM).
Adapun spesifikasi SPC wireless gamepad interface sebagai berikut :
Daya bisa diperoleh dari baterai 4.8 – 5.4 Volt atau sumber catu daya lain dengan tegangan 9 – 12 V.
Bekerja pada pita frekuensi 433 Mhz.
Jangkauan maksimum 100 meter (tanpa halangan).
Tersedia 60 kanal komunikasi.
Auto scanning kanal komunikasi yang kosong (secara bergantian).
Tersedia antarmuka UART untuk mengirimkan data tambahan secara wireless.
Pin Input/Output kompatibel dengan level tegangan TTL dan CMOS.
Kompatibel dengan modul-modul EMS H-Bridge.
Terdapat 2 set output PWM dengan frekuensi 300 Hz.
Kompatibel dengan gamepadDUALSHOCK® 2 untuk PlayStation® 2.
Mendukung 12 tombol aksi, 4 tombol arah, dan 2 joystick analog pada gamepad.
Mendukung mode getar pada gamepad (Innovative Electronics 2013).
Gambar 1 SPC wireless gamepad interface
Al Farisi (2012) menyebutkan uji jalan lurus bertujuan untuk menentukan kestabilan gerak traktor dengan mengikuti satu baseline di lahan. Operator mengendalikan arah laju traktor dengan memposisikan traktor di tengah baseline, baik dengan kemudi secara konvensional dan motor DC maupun dengan metode radio control melalui transmitter. Uji ini dilakukan dengan menentukan panjang lintasan tertentu di lapangan dan melihat besarnya simpangan yang terjadi pada jarak yang ditempuh.
5
METODE
Kegiatan penelitian dilaksanakan mulai bulan Februari 2013 sampai dengan September 2013 dan bertempat di Laboratorium Lapang Siswadhi Soepardjo, Leuwikopo, Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, IPB.
Bahan
Bahan yang diperlukan ialah SPC wireless gamepad interface, LCD TV 7 inci, kamera nirkabel, video receiver, joystick Playstation 2, aki 12 V (6Ah), papan PCB, komponen-komponen elektronika, saklar, kipas angin DC, black housing 1 pin, motor driver 30A, kabel, motor listrik DC, puli plastik, kawat baja, plat baja, tangkai baja, mur dan baut 10 mm, papan akrilik, kotak plastik, spacer.
Alat
1. Traktor roda empat mini Kubota B6100 2. - Perangkat lunak
a. Proses pembuatan gambar rangkaian elektronika : ISIS Proteus 7.0 Professional.
- Perangkat keras
a. Laptop : Toshiba Satellite L645D b. Multimeter digital Sanwa CD800a c. Aki 12 Volt (45Ah)
d. Solder e. Pasta solder f. Kawat solder g. Pemotong kabel h. Obeng (+)/(-) i. Meteran
j. Patok bambu1 meter k. Timbangan l. Penggaris m. Stopwatch n. Tachometer o. Busur derajat p. Bor listrik Prosedur Penelitian
Kegiatan penelitian ini terdiri dari tahapan meliputi :
A. Perancangan dan Perhitungan
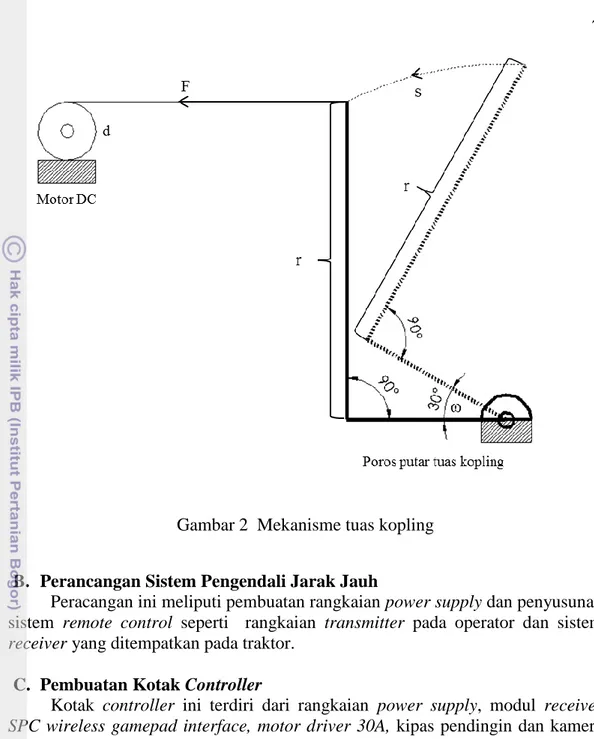
Perancangan dan perhitungan meliputi pengukuran gaya dan torsi dari tuas kopling. Perhitungan digunakan untuk menentukan panjang tuas ekstensi dari kopling serta menentukan torsi dan kecepatan putar dari motor DC penggerak. Selain itu, perhitungan digunakan untuk menentukan kecepatan penekanan
6
kopling oleh motor DC penggerak. Proses perhitungan diperoleh dari persamaan berikut:
1. Menghitung torsi kopling dengan tuas ekstensi
F = m x g (1)
T = F x r (2)
2. Menghitung daya kopling dengan tuas ekstensi ω = 2π x
6 (3)
P = T x ω (4)
P = F x r x ω (5)
3. Menghitung rpm penekanan kopling dengan tuas ekstensi n = ω x 6
2π (6)
4. Menghitung daya motor DC penggerak T = F x r n = r
(rpm) (7)
P = T x 2π
6 (8)
5. Menghitung diameter puli penggerak
Putaran motor (rps) = r (9) k = r r r (10) (11) Dimana : F = gaya (N) m = massa (kg) g = percepatan gravitasi (m/s2) r = jari-jari tuas kopling (m) T = torsi (Nm)
ω = kecepatan sudut (rad/s) π = phi (3.1415927)
= kecepatan sudut (°/s) P = daya (W)
n = putaran per menit (rpm) k = keliling lingkaran puli (m) d = diameter lingkaran puli (m) S = jarak tekan kopling (cm)
7
Gambar 2 Mekanisme tuas kopling
B. Perancangan Sistem Pengendali Jarak Jauh
Peracangan ini meliputi pembuatan rangkaian power supply dan penyusunan sistem remote control seperti rangkaian transmitter pada operator dan sistem receiver yang ditempatkan pada traktor.
C. Pembuatan Kotak Controller
Kotak controller ini terdiri dari rangkaian power supply, modul receiver SPC wireless gamepad interface, motor driver 30A, kipas pendingin dan kamera nirkabel.
D. Pembuatan Modul Remote Control
Modul ini terdiri dari rangkaian modul transmitter SPC wireless gamepad interface, joystick Playstation 2, video receiver dan LCD TV 7 inci. Modul ini berfungsi sebagai alat pengendali oleh operator sekaligus sebagai alat pemantau kondisi di depan traktor secara realtime. Modul ini mengonsumsi arus sebesar 0.5 A 12 Volt dan ditenagai oleh aki kering 12 Volt (6Ah) dan cukup untuk operasi selama kurang lebih 8 jam perhari.
E. Perancangan Mekanisme Sistem Pengendali
Perancangan mekanisme sistem pengendali bertujuan untuk menentukan bagian traktor yang akan dilakukan modifikasi. Bagian dari traktor yang dimodifikasi ialah bagian kendali steering, bagian kendali tuas akselerasi dan
8
bagian kendali tuas kopling. Pada perancangan mekanisme sistem pengendali ini meliputi beberapa tahapan yaitu:
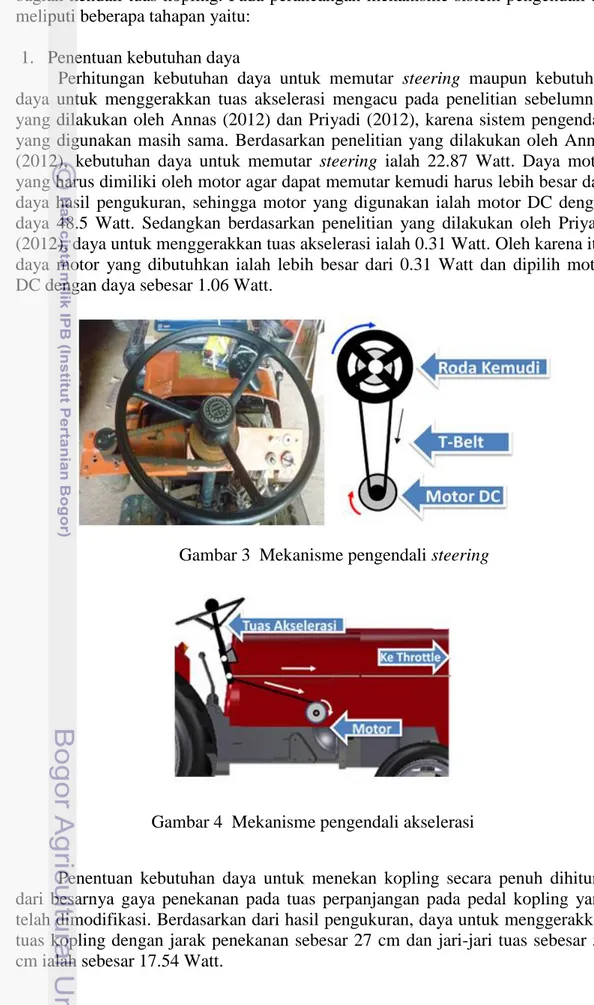
1. Penentuan kebutuhan daya
Perhitungan kebutuhan daya untuk memutar steering maupun kebutuhan daya untuk menggerakkan tuas akselerasi mengacu pada penelitian sebelumnya yang dilakukan oleh Annas (2012) dan Priyadi (2012), karena sistem pengendali yang digunakan masih sama. Berdasarkan penelitian yang dilakukan oleh Annas (2012), kebutuhan daya untuk memutar steering ialah 22.87 Watt. Daya motor yang harus dimiliki oleh motor agar dapat memutar kemudi harus lebih besar dari daya hasil pengukuran, sehingga motor yang digunakan ialah motor DC dengan daya 48.5 Watt. Sedangkan berdasarkan penelitian yang dilakukan oleh Priyadi (2012), daya untuk menggerakkan tuas akselerasi ialah 0.31 Watt. Oleh karena itu, daya motor yang dibutuhkan ialah lebih besar dari 0.31 Watt dan dipilih motor DC dengan daya sebesar 1.06 Watt.
Gambar 3 Mekanisme pengendali steering
Gambar 4 Mekanisme pengendali akselerasi
Penentuan kebutuhan daya untuk menekan kopling secara penuh dihitung dari besarnya gaya penekanan pada tuas perpanjangan pada pedal kopling yang telah dimodifikasi. Berdasarkan dari hasil pengukuran, daya untuk menggerakkan tuas kopling dengan jarak penekanan sebesar 27 cm dan jari-jari tuas sebesar 57 cm ialah sebesar 17.54 Watt.
9 2. Penentuan mekanisme penyaluran tenaga
Mengacu pada Annas (2012), mekanisme penyaluran tenaga pada steering menggunakan timing belt (T-Belt) sesuai yang telah dirancang pada penelitian sebelumnya. Pemilihan mekanisme ini berdasarkan perbandingan tenaga yang diteruskan dari sumber penggerak dengan komponen yang akan digerakkan besarnya sama dikarenakan transmisi T-Belt tidak mengalami slip saat berputar jika dibandingkan dengan transmisi V-Belt. Sedangkan pada transmisi daya untuk menggerakkan tuas akselerasi menggunakan transmisi tali yang digerakkan oleh motor, sesuai dengan rancangan sebelumnya oleh Priyadi (2012). Pada transmisi daya untuk menggerakkan tuas kopling menggunakan tali baja yang ditarik oleh motor menggunakan puli plastik.
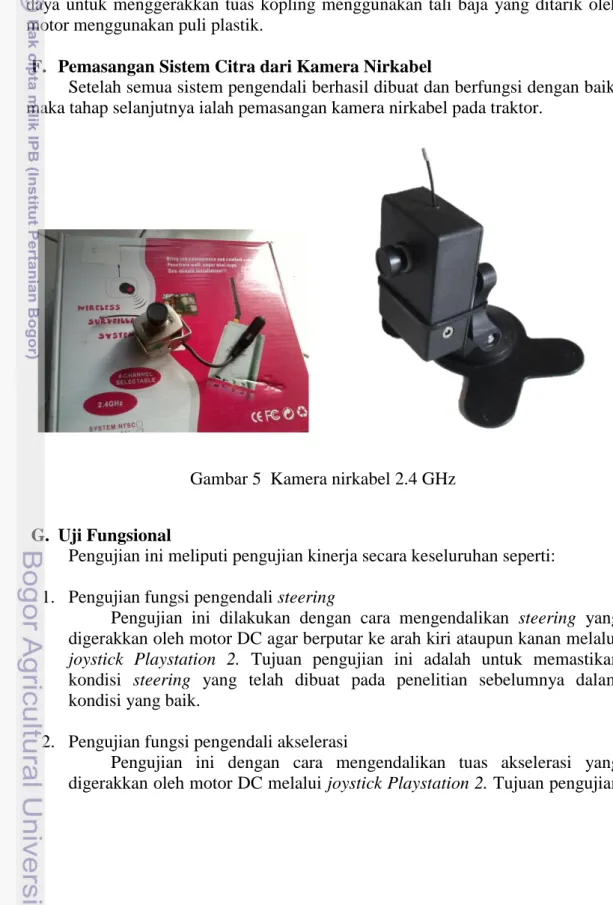
F. Pemasangan Sistem Citra dari Kamera Nirkabel
Setelah semua sistem pengendali berhasil dibuat dan berfungsi dengan baik, maka tahap selanjutnya ialah pemasangan kamera nirkabel pada traktor.
Gambar 5 Kamera nirkabel 2.4 GHz
G. Uji Fungsional
Pengujian ini meliputi pengujian kinerja secara keseluruhan seperti: 1. Pengujian fungsi pengendali steering
Pengujian ini dilakukan dengan cara mengendalikan steering yang digerakkan oleh motor DC agar berputar ke arah kiri ataupun kanan melalui joystick Playstation 2. Tujuan pengujian ini adalah untuk memastikan kondisi steering yang telah dibuat pada penelitian sebelumnya dalam kondisi yang baik.
2. Pengujian fungsi pengendali akselerasi
Pengujian ini dengan cara mengendalikan tuas akselerasi yang digerakkan oleh motor DC melalui joystick Playstation 2. Tujuan pengujian
10
ini ialah memastikan kondisi pengendali akselerasi yang telah dibuat pada penelitian sebelumnya masih dalam kondisi yang baik.
3. Pengujian fungsi pengendali tuas kopling
Pengujian ini dengan cara mengendalikan pedal kopling yang digerakkan oleh motor DC melalui joystick Playstation 2. Jika kopling dapat menekan penuh dan mampu kembali ke posisi netral, berarti pengendali kopling ini dalam kondisi yang baik. Pengujian lainnya ialah mengukur waktu penekanan kopling sampai kondisi menekan penuh.
4. Pengujian fungsi remote control
Remote control dalam kondisi baik jika joystick Playstation 2 dapat ditekan dengan mudah dan mampu mengeksekusi perintah dari operator, transmitter SPC wireless gamepad interface mampu mengirimkan sinyal pengendali dari joystick Playstation 2 ke traktor sampai jarak maksimum, video receiver mampu menerima data video dari kamera nirkabel yang terpasang pada traktor sampai jarak maksimum serta LCD TV 7 inci mampu menampilkan gambar yang dikirimkan oleh kamera nirkabel. Pada pengujian ini, remote control dalam kondisi baik.
5. Pengujian kamera nirkabel
Pengujian ini dengan cara mengaktifkan kamera tersebut agar mengirimkan gambar video yang ditangkap oleh kamera ke video receiver dan menampilkannya pada LCD TV 7 inci pada remote control.
6. Pengujian kipas pendingin pada kotak controller
Memastikan dua buah kipas bekerja dengan baik untuk mensirkulasikan udara agar mendinginkan komponen di dalam kotak controller.
H. Pengujian Lapangan
Pengujian lapangan ini dilakukan untuk memastikan alat yang dibuat pada penelitian ini dapat bekerja dengan baik di lapangan serta dilakukan pengambilan data-data di lapangan. Tahapannya meliputi:
1. Pengujian jangkauan maksimum transmisi SPC wireless gamepad interface Pengujian ini dilakukan dengan mengukur jarak maksimum pengendalian traktor dari empat posisi remote control terhadap traktor, yaitu posisi depan, belakang, kiri dan kanan.
2. Pengujian jangkauan maksimum kamera nirkabel
Pengujian ini dilakukan dengan cara mengukur jangkauan maksimum transmisi video oleh kamera nirkabel yang terpasang pada traktor ke video receiver pada remote control. Pengukuran ini dilakukan dengan membandingkan empat posisi remote control terhadap traktor, yaitu posisi depan, belakang, kiri dan kanan.
11 3. Membandingkan jangkauan maksimum SPC wireless gamepad interface
dengan kamera nirkabel
Tahapan ini ialah membandingkan jangkauan keduannya. Hal tersebut dilakukan untuk mengetahui perbedaan jangkauan maksimum dari kedua komponen tersebut.
4. Mengukur jarak objek terhadap traktor yang terlihat melalui kamera nirkabel
Tujuannya ialah untuk mengetahui jarak objek terhadap traktor. Objek yang digunakan ialah patok bambu dengan tinggi 1 meter. Patok bambu tersebut diletakkan di depan traktor pada jarak maksimum yang masih terlihat jelas melalui kamera dan diletakkan pada jarak terdekat yang masih bisa ditangkap oleh kamera. Pengujian ini agar halangan yang ada di depan traktor dapat dihindari walaupun berada pada jarak yang paling dekat. 5. Uji simpangan traktor
Uji lurus bertujuan untuk mengetahui kestabilan gerak traktor dengan mengikuti baseline di lahan saat dikendalikan secara nirkabel. Lintasan lurus yang disiapkan sepanjang 20 meter. Pada ujung lintasan ditancapkan patok bambu dengan tinggi 1 meter. Bambu tersebut dibidik melalui kamera nirkabel yang di dapannya dipasang tiang pembidik. Simpangan yang dibentuk oleh pembuat garis yang dipasangkan pada implement traktor, diukur pada setiap jarak 2 meter dari titik start. Selain itu, uji lainnya ialah agar traktor mengikuti baseline putih setengah lingkaran agar mengetahui kemampuan pemandu dari kamera.
Penempatan kamera nirkabel dan pembidik seperti yang ditunjukkan pada gambar 6 di bawah ialah bertujuan agar lebih mendekati cara pandang operator saat mengemudikan traktor secara manual. Selain itu, tujuan lainnya ialah agar transmisi data video dari kamera nirkabel ke remote control tidak terganggu karena terhalang oleh komponen ataupun bodi traktor tersebut.
12
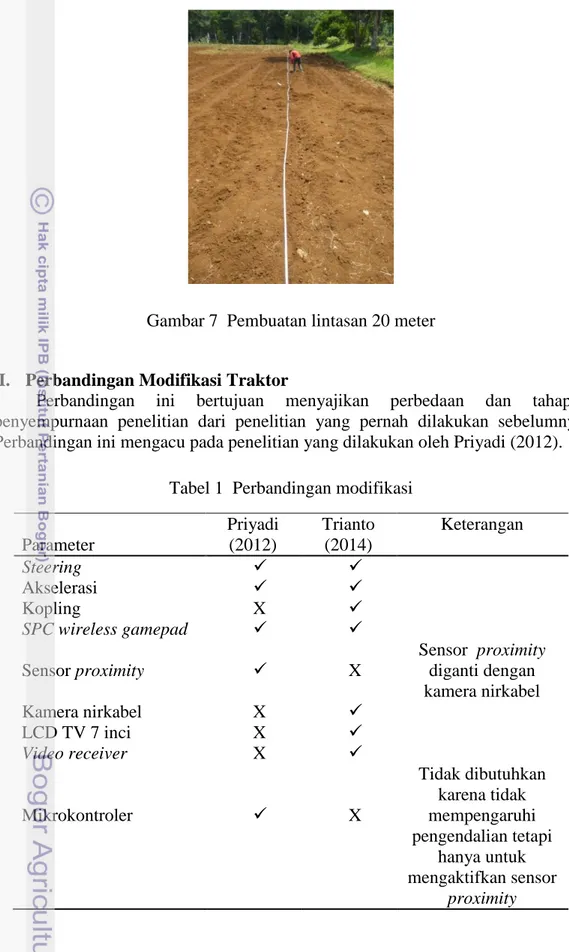
Gambar 7 Pembuatan lintasan 20 meter
I. Perbandingan Modifikasi Traktor
Perbandingan ini bertujuan menyajikan perbedaan dan tahapan penyempurnaan penelitian dari penelitian yang pernah dilakukan sebelumnya. Perbandingan ini mengacu pada penelitian yang dilakukan oleh Priyadi (2012).
Tabel 1 Perbandingan modifikasi Parameter Priyadi (2012) Trianto (2014) Keterangan Steering Akselerasi Kopling X SPC wireless gamepad Sensor proximity X Sensor proximity diganti dengan kamera nirkabel Kamera nirkabel X LCD TV 7 inci X Video receiver X Mikrokontroler X Tidak dibutuhkan karena tidak mempengaruhi pengendalian tetapi hanya untuk mengaktifkan sensor proximity
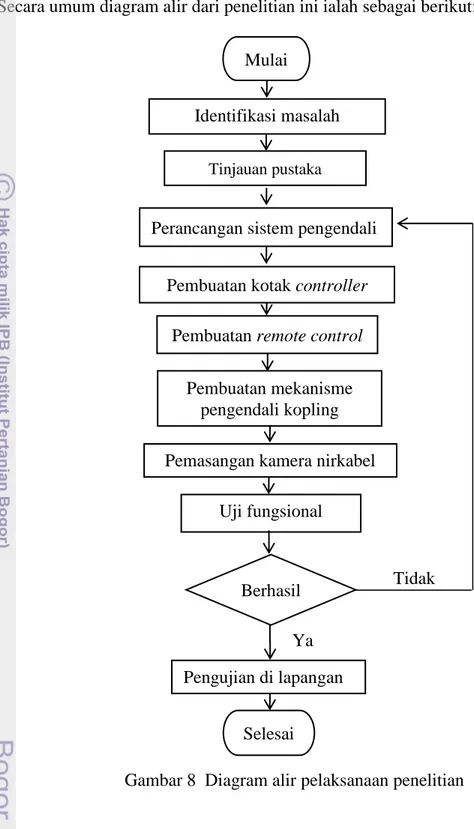
13 Secara umum diagram alir dari penelitian ini ialah sebagai berikut:
Gambar 8 Diagram alir pelaksanaan penelitian Ya
Mulai
Identifikasi masalah
Tinjauan pustaka
Perancangan sistem pengendali Pembuatan kotak controller
Berhasil Tidak
Selesai Pengujian di lapangan Pembuatan remote control
Pembuatan mekanisme pengendali kopling Pemasangan kamera nirkabel
14
HASIL DAN PEMBAHASAN
Pembuatan Sistem Pengendali A. Pembuatan Rangkaian Power Supply
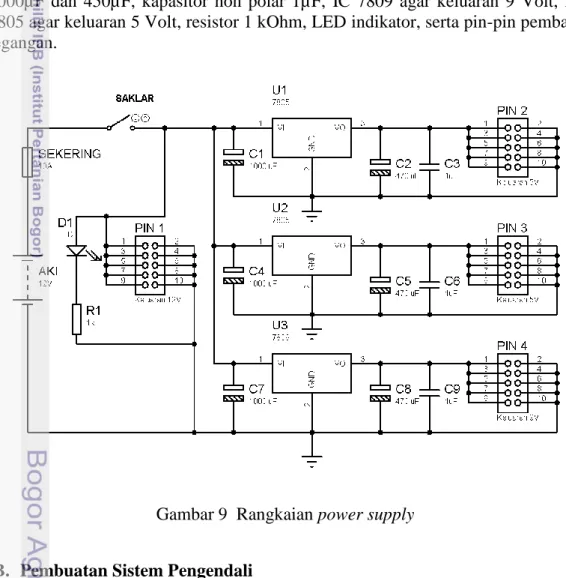
Rangkaian ini berfungsi sebagai pembagi tegangan untuk seluruh rangkaian. Keluarannya yaitu 12 Volt, 9 Volt dan 5 Volt. Keluaran 12 Volt digunakan untuk menggerakkan motor DC pengendali dan kipas pendingin. Keluaran 9 Volt digunakan untuk mengaktifkan kamera nirkabel, sedangkan keluaran 5 Volt digunakan untuk mengaktifkan rangkaian penerima pada SPCwireless gamepad interface.
Rangkaian ini mengambil sumber tegangan dari aki traktor sebesar 12 Volt. Terdiri dari komponen elektronika seperti saklar, sekering, kapasitor polar 1000µF dan 450µF, kapasitor non polar 1µF, IC 7809 agar keluaran 9 Volt, IC 7805 agar keluaran 5 Volt, resistor 1 kOhm, LED indikator, serta pin-pin pembagi tegangan.
Gambar 9 Rangkaian power supply
B. Pembuatan Sistem Pengendali
Rangkaian utama sistem pengendali ini terdiri dari tiga bagian utama yaitu rangkaian transmitter untuk mengirim perintah, rangkaian receiver untuk menerima dan mengolah data perintah serta rangkaian EMS 30A H – Bridge untuk menggerakkan motor DC berdasarkan instruksi yang dilakukan oleh operator.
Modul rangkaian transmitter berfungsi untuk mengirimkan perintah – perintah ke modul receiver dalam bentuk logika high ataupun low. Perintah
15 tersebut dikirimkan secara nirkabel dengan frekuensi kerja 433 Mhz. Modul transmitter ini dihubungkan dengan joystick Playstation 2 yang digunakan sebagai pengendali dari operator. Pada rangkaian transmitter ini digabungkan dengan rangkaian video receiver dan LCD TV 7 inci menjadi satu modul (remote control) yang digunakan oleh operator untuk mengendalikan traktor sekaligus memantau keadaan di depan traktor secara realtime.
Gambar 10 Modul antarmuka transmitter SPC wireless gamepad
Gambar 11 Bagian-bagian tombol gamepad
Gambar 12 LCD TV 7 inci merek Hollywood Keterangan tombol:
1. Tombol arah digital 2. Joystick analog kiri 3. Joystick analog kanan 4. Tombol aksi 5. Tombol left (L1 dan L2) 6. Tombol right (R1 dan R2) 7. Tombol select analog
16
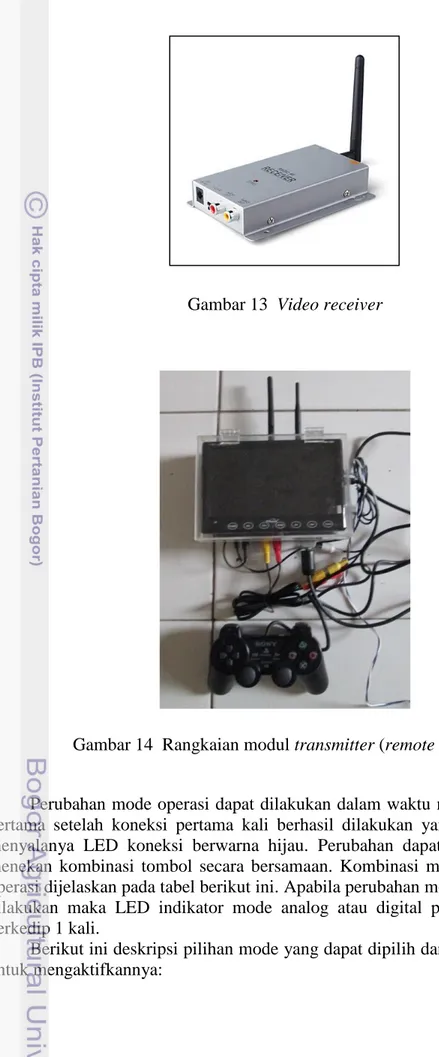
Gambar 13 Video receiver
Gambar 14 Rangkaian modul transmitter (remote control)
Perubahan mode operasi dapat dilakukan dalam waktu maksimum 10 detik pertama setelah koneksi pertama kali berhasil dilakukan yang ditandai dengan menyalanya LED koneksi berwarna hijau. Perubahan dapat dilakukan dengan menekan kombinasi tombol secara bersamaan. Kombinasi masing-masing mode operasi dijelaskan pada tabel berikut ini. Apabila perubahan mode operasi berhasil dilakukan maka LED indikator mode analog atau digital pada gamepad akan berkedip 1 kali.
Berikut ini deskripsi pilihan mode yang dapat dipilih dan kombinasi tombol untuk mengaktifkannya:
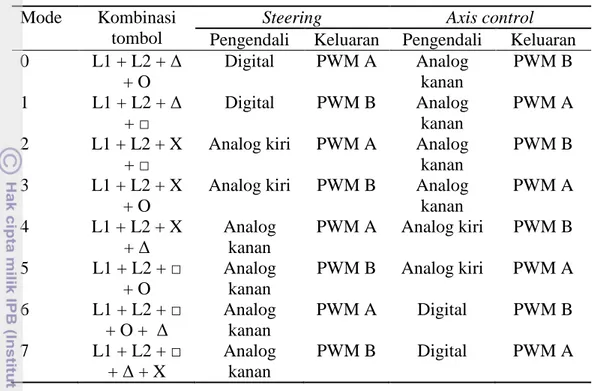
17 Tabel 2 Pilihan mode operasi pada gamepad
Mode Kombinasi tombol
Steering Axis control Pengendali Keluaran Pengendali Keluaran 0 L1 + L2 + Δ + O Digital PWM A Analog kanan PWM B 1 L1 + L2 + Δ + □ Digital PWM B Analog kanan PWM A 2 L1 + L2 + X + □
Analog kiri PWM A Analog kanan
PWM B 3 L1 + L2 + X
+ O
Analog kiri PWM B Analog kanan PWM A 4 L1 + L2 + X + Δ Analog kanan PWM A Analog kiri PWM B 5 L1 + L2 + □ + O Analog kanan PWM B Analog kiri PWM A 6 L1 + L2 + □ + O + Δ Analog kanan PWM A Digital PWM B 7 L1 + L2 + □ + Δ + X Analog kanan PWM B Digital PWM A
Pada penelitian ini menggunakan mode operasi yaitu mode 6. Cara pengaturan mode 6 ditunjukkan pada gambar 15. Mode 6 memiliki keluaran PWM A pada analog kanan dan PWM B pada digital. PWM B dipakai untuk kendali belok dan kendali tuas akselerasi, maka tombol digital digunakan sebagai tombol kendali.
Gambar 15 Cara pengaturan mode operasi
Tombol arah “LEFT – RIGHT” untuk kendali belok dan tombol arah “UP – DOWN” untuk kendali tuas akselerasi (Gambar 16). Pengendalian kopling dapat dilakukan dengan cara menekan tombol “ANALOG” terlebih dahulu sebagai aktivasi kopling (lampu LED merah menyala). Penekanan tombol analog “Kopling” seperti yang ditunjukkan arah panah pada gambar 16, penekanan ke arah atas (ON) ataupun ke kanan (ON) untuk penekanan tuas kopling dan jika ke
18
arah bawah (OFF) ataupun ke arah kiri (OFF) maka kopling kembali pada posisi netral. Jika diinginkan penekanan tuas kopling secara perlahan-lahan, maka dapat dilakukan dengan cara penekanan tombol analog “Kopling” secara perlahan-lahan.
Gambar 16 Tombol tuas kendali
Modul receiver yang dipasang pada traktor berfungsi sebagai penerima logika yang dikirim oleh modul transmitter pada operator, kemudian mengolahnya menjadi set output dalam bentuk sinyal PWM (Pulse Width Modulation) yang terdiri dari PWM A dan PWM B. Penekanan tombol akan menghasilkan sinyal PWM 100%. Pada penelitian ini diperlukan modul EMS 30A H Bridge sebagai pengendali putaran motor.
19 EMS 30A H-Bridge merupakan H-Bridge berbasis IC VNH3SP30 yang didesain untuk menghasilkan 2 arah dengan arus kontinyu sampai dengan 30 A pada tegangan 5.5 Volt sampai 36 Volt (IC VNH2SP30 hanya sampai 16 Volt). Modul ini dilengkapi dengan rangkaian sensor arus beban yang dapat digunakan sebagai umpan balik ke pengendali. Modul ini mampu men-drive beban-beban induktif seperti misalnya relay, selenoida, motor DC, motor stepper dan berbagai macam beban lainnya. Pada penelitian ini dipasang 3 buah modul EMS yaitu modul 1 untuk menggerakkan motor pada steering, modul 2 untuk menggerakkan motor pada tuas akselerasi dan modul 3 untuk menggerakkan motor pada tuas pengendali kopling.
Modul receiver SPC wireless gamepad interface dapat dihubungkan dengan 4 buah modul EMS 30A H-Bridge, sehingga mampu mengendalikan 4 buah motor sekaligus.
Gambar 18 Modul EMS 30A H-Bridge
Hubungan pin-pin antara SPC wireless gamepad dengan EMS 30A H-Bridge secara lengkap pada penelitian ini dapat dilihat pada lampiran 3.
20
C. Pembuatan Mekanisme Pengendali Kopling
Pembuatan mekanisme pengendali kopling dilakukan dengan memodifikasi pada bagian pedal kopling dengan menambahkan tuas perpanjangan. Setelah mekanisme pengendali kopling berhasil dibuat sesuai rencana, tahap selanjutnya ialah melakukan pengukuran dan perhitungan daya agar kopling tersebut dapat digerakkan oleh motor DC. Dari hasil perhitungan menunjukkan kebutuhan daya minimal sebesar 17.56 Watt. Oleh karena itu, motor yang digunakan sebaiknya memiliki daya lebih besar dari 17.56 Watt. Daya motor DC yang dipilih ialah memiliki daya sebesar 75.5 Watt dengan kecepatan putar sebesar 150 rpm. Dipilihnya motor ini dengan daya sekitar 4 kali kebutuhan daya mekanisme pengendali kopling karena terbatasnya jenis motor yang dijual di pasar.
Jika diasumsikan waktu yang dibutuhkan kopling untuk menekan penuh dari posisi netral selama 1 detik dan jarak tempuh ujung tuas perpanjangan yang bergerak sejauh 27 cm, maka besar diameter puli yang digunakan untuk untuk menarik tuas perpanjangan ialah sebesar 3.44 cm. Perhitungan lengkapnya pada lampiran 4.
Gambar 20 Mekanisme pengendali kopling
Gambar 21 Hasil rancangan sistem pengendali jarak jauh pada traktor dan dilengkapi kamera nirkabel
21
Pengujian Lapangan A. Uji Kondisi Komponen Sistem Pengendali
Tabel 3 Kondisi sistem pengendali
Komponen Kondisi
Pengendali steering Baik
Pengendali akselerasi Baik
Pengendali kopling Baik
Joystick Baik
Modul SPC wireless gamepad Baik
LCD TV 7 inci Baik
Kotak controller Baik
Kamera nirkabel Baik
Video veceiver Baik
Kabel-kabel Baik
Berdasarkan tabel diatas, secara keseluruhan kondisi sistem pengendali pada traktor penelitian ini berfungsi dengan baik.
B. Uji Statis Penekanan Kopling
Table 4 Lama waktu penekanan kopling Ulangan ke- Lama waktu penekanan
1 1 detik
2 1 detik
3 1 detik
4 1 detik
5 1 detik
Berdasarkan tabel di atas, lama waktu yang dibutuhkan untuk penekanan kopling hingga menekan penuh ialah sebesar 1 detik.
C. Data Uji Jangkauan Maksimum Pengendalian dan Kamera Nirkabel
22
Gambar 23 Grafik perbandingan jangkauan SPC wireless gamepad dengan kamera nirkabel terhadap posisi traktor
Berdasarkan gambar 23 di atas, diketahui bahwa jangkauan transmisi data pada kamera nirkabel lebih besar daripada jangkauan SPC wireless gamepad. Posisi remote control terhadap traktor juga mempengaruhi jarak jangkauan maksimum baik SPC wireless gamepad maupun kamera nirkabel. Hal tersebut kemungkinan disebabkan posisi antena keduanya yang terhalang oleh komponen-komponen elektronik pada kotak controller maupun oleh papan akrilik penutup kotak controller. Oleh karena itu, jarak jangkauan SPC wireless gamepad diupayakan seimbang dengan kamera nirkabel agar traktor tidak kehilangan kendali walaupun kamera nirkabel masih mengirimkan data video.
D. Uji Jarak Objek Terhadap Traktor Melalui Kamera Nirkabel
Uji ini bertujuan untuk mengetahui jarak pandangan maksimum ataupun minimum suatu objek di lapangan terhadap traktor yang masih terlihat jelas dan mampu ditangkap oleh kamera. Hal itu bertujuan agar operator dapat menghindarkan traktor tersebut dari risiko tabrakan saat ada halangan di depannya.
Tabel 5 Uji pandangan melalui kamera nirkabel
Parameter Ukuran Jarak pandang terjauh 7.60 m Jarak pandangan terdekat 1.55 m 103.5 m 107 m 92 m 80 m 129 m 113.7 m 118.7 m 135m
Depan Belakang Kiri Kanan
Perbandingan jangkauan SPC wireless gamepad
dengan kamera nirkabel terhadap posisi traktor SPC wireless gamepad Kamera nirkabel
23
E. Uji Simpangan Traktor
Berdasarkan pengujian jalan lurus pada traktor yang sama dilakukan oleh Al Farisi (2012), baik secara manual maupun melalui pengendalian jarak jauh dengan cara mengendalikan traktor untuk mengikuti baseline lurus sejauh 20 meter dan simpangan yang dibentuk oleh jejak traktor diukur pada jarak setiap 2 meter. Simpangan maksimum traktor terhadap baseline 20 meter yang dikendalikan secara manual ialah sebesar 10.5 cm, sedangkan dikendalikan melalui pengendalian jarak jauh ialah sebesar 7 cm. Hal yang dilakukan pada penelitian ini ialah uji simpangan dengan pengendali jarah jauh. Simpangan maksimum traktor dengan pengendalian jarak jauh pada penelitian ini ialah 10.7 cm. Data pengujian ini dapat dilihat pada lampiran 6.
Gambar 24 Pengamatan kondisi di depan traktor
Selain itu, pengujian lainnya ialah traktor nirkabel mengikuti baseline berwarna putih setengah lingkaran dengan diameter 5 meter dan setiap sudut 20° diukur simpangannya. Tujuannya ialah menguji traktor seperti line follower. Simpangan yang dibentuk ialah +72.68 cm (ke arah dalam lingkaran) saat pengujian belok searah jarum jam dan +63.90 cm (ke arah dalam lingkaran) saat pengujian belok berlawanan arah jarum jam. Dari data simpangan ini, terlihat bahwa traktor kurang stabil saat mengikuti baseline setengah lingkaran. Hal itu mungkin disebabkan pembidik pada kamera kurang akurat yang hanya mampu menangkap gambar dengan jarak pandang minimum sebesar 1.55 meter ataupun karena radius lingkaran yang kecil dan belum berfungsinya rem kiri dan kanan untuk pengendalian jarak jauh yang dapat memaksimalkan radius belok.
Lintasan traktor pada kondisi riil tidak diberi suatu penanda, tetapi mengikuti pemandu belok di depan kamera. Oleh karena itu, penelitian selanjutnya diharapkan untuk mengembangkan komponen pemandu traktor untuk memudahkan saat berbelok. Data pengujian traktor mengukuti garis lingkaran dapat dilihat pada lampiran 7.
24
Gambar 25 Pembuatan baseline setengah lingkaran
Gambar 26 Baseline setengah lingkaran yang diikuti traktor nirkabel
SIMPULAN DAN SARAN
Simpulan
Berdasarkan hasil penelitian ini dapat disimpulkan bahwa pengendalian steering, akselerasi dan kopling dapat dilakukan dengan modul SPC wireless gamepad. Rancangan pengendali steering dan akselerasi yang pernah dibuat pada penelitian sebelumnya telah berhasil dimodifikasi dengan sistem pengkabelan yang lebih rapi dan aman. Kotak controller telah berhasil dibuat dengan sistem pengkabelan yang lebih rapi dan dilengkapi dengan sekering agar meminimalisasi kerusakan komponen saat terjadi hubungan arus pendek. Sistem pengendali kopling telah berhasil dibuat dan dapat dikendalikan melaui remote control serta berfungsi sebagai rem pada lahan yang datar. Kamera nirkabel berhasil dipasang dan berfungsi sebagai pemandu operator dalam mengendalikan traktor dan mengetahui kondisi di depan traktor dengan ketelitian jarak pandang maksimum 7.60 meter dan jarak pandang minimum 1.55 meter. Kondisi di depan traktor tersebut dapat dipantau melalui monitor LCD TV 7 inci pada remote control.
25
Saran
Saran yang dapat diberikan ialah perlu dilakukan penelitian lanjutan dalam penyetaraan jangkauan maksimum antara SPC wireless gamepad dengan kamera nirkabel. Selain itu, perlu dilakukan modifikasi pada sistem pengereman dan implemen agar dapat dikendalikan melalui remote control. Perlunya dibuat suatu pemandu di depan kamera nirkabel agar memudahkan operator dalam menentukan jarak halangan terhadap traktor dan memudahkan traktor saat pengolahan lahan.
DAFTAR PUSTAKA
Priyadi BA. 2012. Rancang Bangun Pengendali Nirkabel pada Pengemudian Traktor Mini [skripsi]. Bogor (ID): Institut Pertanian Bogor.
Ahmad U, Desrial, Saksono M. 2011. Pengembangan Metoda Deteksi Rintangan Menggunakan Kamera CCD untuk Traktor Tanpa Awak. Di dalam: Ahmad U, Desrial, Saksono M, editor. Pengembangan Metoda Deteksi Rintangan Menggunakan Kamera CCD untuk Traktor Tanpa Awak. Seminar Nasional PERTETA [Internet]. [6-8 Desember 2011 Bandung]. Bogor (ID): Fakultas Teknologi Pertanian, IPB. hlm 1-9; [diunduh 2013 Agu 12]. Tersedia pada: http://repository.ipb.ac.id/bitstream/handle/123456789/56653/Semnas%20P erteta_Usman_03.pdf
Al Farisi S. 2012. Pengujian Kinerja Traktor Mini dengan Kendali Nirkabel [skripsi]. Bogor (ID): Institut Pertanian Bogor.
Annas MS. 2012. Otomasi Kemudi pada Traktor 4 Roda Menggunakan LabView dan RTK-DGPS (Studi Kasus Traktor Kubota Mini Empat Roda) [desertasi]. Bogor (ID): Institut Pertanian Bogor.
Ariyus D, Rum AKR. 2008. Komunikasi Data. Yogyakarta : Penerbit ANDI. Bolton W. 1996. Mechatronics. Electronic Control Systems in Mechanical
Engineering. London : Addison Wesley Longman Limited.
Desrial, Subrata IM, Ahmad U, Annas S, Saeful C. 2010. Pengembangan Sistem Kemudi Otomatis Pada Traktor Pertanian Menggunakan Navigasi GPS. Di dalam: Desrial, Subrata IM, Ahmad U, Annas S, Saeful C, editor. Pengembangan Sistem Kemudi Otomatis Pada Traktor Pertanian Menggunakan Navigasi GPS Prosiding. Seminar Nasional Mekanisasi Pertanian [Internet]. [2010]. Bogor (ID): Departemen Teknik Mesin dan Biosistem, FATETA, IPB. hlm 1-10; [diunduh 2013 Agu 12]. Tersedia pada:http://digilib.litbang.deptan.go.id/repository/index.php/repository/dow nload/2308/2342
26
Sofana I. 2008. Membangun Jaringan Komputer. Bandung : Informatika.
Wardhana L. 2006. Belajar sendiri Mikrokontroler AVR Seri ATMega8535 Simulasi, Harware danAplikasi.Yogyakarta: Andi Yogyakarta
[Innovative Electronics]. Manual SPC Gamepad Interface [diunduh 2013 Mei 17].
Tersedia pada:
http://innovativeelectronics.com/innovative_electronics/download_files/man ual/Manual%20SPC%20Gamepad%20Interface.pdf
[Kamera CCTV Murah]. Kamera CCTV Wireless Anboqi, Mini & Terkamuflase Sempurna [diunduh 2013 Desember 03]. Tersedia pada: http://kameracctvmurah.net/wp-content/uploads/2011/06/kamera-cctv-wireless.jpg
[Lightinthebox]. Radio AV Receiver [diunduh 2013 November 20]. Tersedia pada: http://www.lightinthebox.com/Radio-AV-receiver---Wireless-transmitting-audio-video-with-Easy-installation_p186841.html#
[Mikron123]. EMS 30A H-Bridge[diunduh 2013 November 20]. Tersedia pada: http://www.mikron123.com/components/com_virtuemart/shop_image/produ ct/5f56a35e126d0a7ff9dc7e8e393d892a.jpg
[Mikron123]. SPC Wireless Gamepad Interface [diunduh 2013 November 20].
Tersedia pada:
http://www.mikron123.com/components/com_virtuemart/shop_image/produ ct/c7389c6735848123bc651209a3d9017c.jpg
27 Lampiran 1 Spesifikasi traktor mini
Merk/Tipe Kubota B6100
Tahun pembuatan 1981
Bahan bakar Diesel
Jumlah silinder 3
Isi silinder 700cc
Jumlah power 14 HP
Putaran 2800 rpm
Pendingin air
Kapasitas oli mesin 3.9 liter Kapasitas tangki solar 12.9 liter
Jarak sumbu 124 cm
Ukuran ban depan 4 – 9 Ukuran ban belakang 7 – 16 Jenis sistem kemudi Manual
Transmisi Manual
Tipe transmisi Tanpa sinkron Jumlah gigi 6 maju, 2 mundur Kapasitas oli transmisi 11.5 liter
28
29 Lampiran 3 Hubungan SPC wireless gamepad interface dengan EMS 30A
H-Bridge
M3 & M4 Header (J5) pada SPC wireless gamepad interface dapat dihubungkan ke EMS 30A H-Bridge. Berikut adalah hubungan pin-pin untuk menggerakkan Steering dan Akselerasi:
SPC GAMEPAD INTERFACE J5 EMS 30 A H-Bridge ke-1 J1 Catatan
Pin Nama Pin Nama
1 M3DIR1 1 MIN1
2 M3DIR2 2 MIN2
3 M3PWM 6 MPWM
4 VCC 7 atau
9 VCC
Jika catu daya digital (+5V) untuk modul EMS H-Bridge sudah diperoleh dari sumber lain, maka ke-2 pin ini tidak perlu dihubungkan
5 GND 8 atau
10 PGND Ke-2 pin ini harus dihubungkan EMS 30 A
H-Bridge ke-2 J2
Pin Nama
6 GND 8 atau
10 PGND Ke-2 pin ini harus dihubungkan
7 M4DIR1 1 MIN1
8 M4DIR2 2 MIN2
9 M4PWM 6 MPWM
10 VCC 7 atau
9 VCC
Jika catu daya digital (+5V) untuk modul EMS H-Bridge sudah diperoleh dari sumber lain, maka ke-2 pin ini tidak perlu dihubungkan
30
Berikut adalah hasil modifikasi hubungan (J6) SPC wireless gamepad dengan (J1) EMS 30A H-Bridge agar pengendalian tuas kopling dapat digerakkan dengan oleh motor driver 30A:
M l receiver J6
EMS H Bridge 30A K – J P N P N M DIR MIN 2 M DIR2 2 MIN2 NC - - 4 M PWM 6 MPWM 5 VCC 7 9 VCC 6 GND 8 PGND
31 Lampiran 4 Pembuatan mekanisme pengendali kopling
Penentuan kebutuhan tenaga untuk menggerakkan mekanisme pengendali kopling:
Diketahui: F = 6 kgf = 58.86 N r = 57 cm = 0.57 m
= 30°/s ; ω = 0.523 rad/s (asumsi waktu penekanan kopling selama1 detik )
S = 27 cm Daya kopling: P = F x r x ω
= 58.86 x 0.57 x 0.523 = 17.56 Watt
Berdasarkan perhitungan di atas, kebutuhan daya minimal agar kopling bergerak adalah 17.56 Watt, sehingga motor yang digunakan mesti memiliki daya lebih besar dari daya kopling.
Daya motor yang dipakai :
Diketahui : F = 14 kgf r = 3.5 cm = 0.035 m T = F x r = 14 x 0.035 = 0.49 kgfm = 4.806 Nm n = 150 rpm = 2.5 rps Daya motor : P = T x ω P = T x 26 = 4.806 x 2 x 6 = 75.5 Watt
Jadi, motor yang digunakan dengan daya maksimum sebesar 75.5 Watt. Dipilih motor ini yang memiliki daya 4 kali lipat dibandingkan daya kopling dikarenakan terbatasnya tipe motor yang dijual di pasar yang sesuai keinginan.
Penentuan ukuran diameter puli penggerak:
Diketahui : n = 150 rpm = 2.5 rps S = 27 cm
Diameter puli : Jika diharapkan kopling menekan penuh dalam waktu 1 detik , maka: k = r r k = 27 k = 10.8 cm d = d = 8 d = 3.44 cm
32
Lampiran 5 Spesifikasi kamera nirkabel dengan merek “Wireless Surveillance System” dan contoh pemasangannya
N P r r N l
Image pickup device
1/3 1/4 inch CMOS 2 TV system PAL/CCIR NT C/EIA Definition 8 TV l 4 Scan frequency PAL/CCIR : 5 Hz NT C/EIA : 6 Hz 5 Min. illumination L x 6 Output power 5 W 2 W 7 Output frequency 24 4/24 2/245 /2468 MHz 8 Power supple DC 9~ 2 V l
33 Lampiran 6 Uji lurus traktor nirkabel
Percobaan 1
No Jarak dari titik start (m)
Selisih dari baseline (cm) 1 2 9 2 4 17.6 3 6 21 4 8 40 5 10 3 6 12 10.5 7 14 6.8 8 16 0.5 9 18 2 10 20 5 Rata – rata 11.5 Maksimal 40 Minimal 0.5 Standar deviasi 12 Percobaan 2
No Jarak dari titik start (m)
Selisih dari baseline (cm) 1 2 0.5 2 4 1.7 3 6 3.4 4 8 10.5 5 10 7.9 6 12 5.5 7 14 11.9 8 16 30 9 18 21.6 10 20 5.3 Rata – rata 9.8 Maksimal 30 Minimal 0.5 Standar deviasi 9.4
34
Percobaan 3
No Jarak dari titik start (m)
Selisih dari baseline (cm) 1 2 2 2 4 4 3 6 10.6 4 8 12.2 5 10 9.1 6 12 41 7 14 20 8 16 4.4 9 18 9.0 10 20 2 Rata – rata 11.4 Maksimal 41 Minimal 2 Standar deviasi 11.8
Hasil ketiga percobaan
No Parameter Selisih dari baseline (cm)
1 Rata – rata 10.9
2 Maksimal 41
3 Minimal 0.5
35 Lampiran 7 Uji traktor nirkabel mengikuti baseline setengah lingkaran (diameter
5 meter)
a. Searah jarum jam
No Sudut (°) Simpangan (cm) 1 0 +70 2 20 +90 3 40 +70.8 4 60 +70 5 80 +81 6 100 +95 7 120 +100 8 140 +70 9 160 +50 10 180 +30 Rata – rata +72.68
b. Berlawanan arah jarum jam
No Sudut (°) Simpangan (cm) 1 180 +90 2 160 +110 3 140 +114 4 120 +110 5 100 +70 6 80 +50 7 60 0 8 40 +25 9 20 +40 10 0 +30 Rata – rata +63.9
(-) : arah keluar baseline (+): arah kedalam baseline
36
RIWAYAT HIDUP
Penulis dilahirkan dengan nama lengkap Setia Trianto dan nama panggilan Ade (nama kecil) pada tanggal 15 Januari 1991 di Wuran, Kalimantan Tengah. Penulis merupakan anak ketiga dari almarhum Ralin. Diris (Bapak) dan Yulinawati (Ibu). Penulis menamatkan Sekolah Menengah Kejuruan di SMK YPTK Rigomasi Kota Bontang tahun 2009 dengan bidang keahlian Teknik Mekanik Otomotif dan pada tahun yang sama diterima sebagai mahasiswa Institut Pertanian Bogor melalui jalur Beasiswa Utusan Daerah (BUD) yang disponsori oleh PT Pupuk Kaltim. Penulis memilih Mayor Teknik Pertanian, Departemen Teknik Pertanian (sekarang berubah nama menjadi Departemen Teknik Mesin dan Biosistem), Fakultas Teknologi Pertanian.
Selama menjadi mahasiswa penulis aktif diberbagai kegiatan Persekutuan Mahasiswa Kristen IPB (PMK IPB), Himpunan Mahasiswa Teknik Pertanian, anggota Electronic Robotic Club 2010/2011, ketua divisi elektronika di Electronic Robotic Club 2011/2013. Penulis juga pernah mendapatkan penghargaan dari Direktorat Jendral Pendidikan Tinggi (DIKTI) atas partisipasi dan prestasi sebagai finalis Pekan Ilmiah Mahasiswa Nasional ke-26 Tahun 2013 (PIMNAS XXVI) dengan judul “JPD (Jail Phone Detector): Teknologi Pendeteksi Keberadaan Sinyal Handphone untuk Mengurangi Penyalahgunaan Alat Komunikasi di Lembaga Pemasyarakatan (LP)”. Selain itu, penulis mendapatkan penghargaan dan masuk sebagai 11 besar finalis Tanoto Student Research Award 2013 atas penelitian dengan judul “JPD (Jail Phone Detector): Teknologi Pendeteksi Keberadaan Sinyal Handphone untuk Mengurangi Penyalahgunaan Alat Komunikasi di Lembaga Pemasyarakatan (LP)”. Menjadi juara ke-3 Tanoto Student Research Award 2013 atas penelitian yang sama, yaitu “JPD (Jail Phone Detector): Teknologi Pendeteksi Keberadaan Sinyal Handphone untuk Mengurangi Penyalahgunaan Alat Komunikasi di Lembaga Pemasyarakatan (LP)”. Penulis juga pernah menjadi peserta dan membawakan presentasi pada kegiatan The 20th Anniversary International Tri – University International Joint Seminar & Symposium Tahun 2013 di Mie University - Jepang, dengan judul prosiding “Analysis of Energy Demand on Wireless Remote Controlled Tractor”.