LAPORAN JARINGAN SAFAR TIRUAN
PADA PERAMALAN RPM TERHADAP TEGANGAN DAN ARUS
MENGGUNAKAN METODE FEED-FORWARD BACKPROPAGATION
BERBASIS ARTIFICIAL NEURAL NETWORK
Nama : Nuharizka Intan Fauziyah
NIM :141910201087
Mata kuliah : Sistem Kendali Cerdas
JURUSAN TEKNIK ELEKTRO STRATA 1
FAKULTAS TEKNIK
PERAMALAN RPM TERHADAP TEGANGAN DAN ARUS
MENGGUNAKAN METODE FEED-FORWARD BACKPROPAGATION
BERBASIS ARTIFICIAL NEURAL NETWORK
A. Landasan Teori
Rotary per minute atau revolution per minute ( revolusi per menit ) atau biasa disingkat dengan RPM. Umumnya, RPM tersebut digunakan oleh kendaraan bermotor seperti motor dan mobil. Angka yang ditunjukkan dengan berapa kali putaran ( revolusi ) poros engkol atau crank shaft mesin dalam hitungan waktu satu menit.
Pada motor DC berlaku persamaan-persamaan berikut : V = E+I a Ra, E = C n Ф, n =E/C.Ф Dari persamaan-persamaan diatas didapat :
n = (V-Ra.Ra) / C.Ф dengan:
n = Jumlah putaran (rpm) V = tegangan jepit (V) Ia = Arus jangkar (A)
Ra = Hambatan Jangkar (Ohm) C = Konstanta motor
Sehingga dengan memperhatikan persamaan tersebut, putaran motor akan dipengaruhi oleh tegangan motor, arus jangkar, tahanan jangkar dan medan magnet. Jika salah satu besaran diabuat variabel dengan besaran lain tetap maka banyaknya putaran akan sebanding dengan besarnya besaran tersebut.
B. Data yang digunakan
Data yang akan digunakan oleh penulis merupakan data pengujian yang telah dilakukan oleh mahasiswa tingkat akhir dan yang juga digunakan untuk tugas akhir beliau, namun di sini penulis hanya menggunakan 200 data dari 700 data pengujian RPM.
No Input Output RPM Arus Tegangan
1 256 1,68 52,25
2 255,95 1,6812 52,26041 3 255,9 1,6824 52,2708 4 255,85 1,6836 52,28118 5 255,8 1,6848 52,29155 6 255,75 1,686 52,3019 7 255,7 1,6872 52,31223 8 255,65 1,6884 52,32255 9 255,6 1,6896 52,33286 10 255,55 1,6908 52,34315 11 255,5 1,692 52,35343 12 255,45 1,6932 52,36369 13 255,4 1,6944 52,37394 14 255,35 1,6956 52,38417 15 255,3 1,6968 52,39439 16 255,25 1,698 52,40459 17 255,2 1,6992 52,41478 18 255,15 1,7004 52,42496 19 255,1 1,7016 52,43512 20 255,05 1,7028 52,44527
21 255 1,704 52,4554
22 254,95 1,7052 52,46552 23 254,9 1,7064 52,47562 24 254,85 1,7076 52,48571 25 254,8 1,7088 52,49579 26 254,75 1,71 52,50585 27 254,7 1,7112 52,5159 28 254,65 1,7124 52,52593 29 254,6 1,7136 52,53595 30 254,55 1,7148 52,54595 31 254,5 1,716 52,55594 32 254,45 1,7172 52,56592 33 254,4 1,7184 52,57588 34 254,35 1,7196 52,58583 35 254,3 1,7208 52,59577 36 254,25 1,722 52,60569 37 254,2 1,7232 52,6156 38 254,15 1,7244 52,62549
79 252,1 1,7736 53,01962 80 252,05 1,7748 53,02896 81 252 1,776 53,03829 82 251,95 1,7772 53,0476 83 251,9 1,7784 53,05691 84 251,85 1,7796 53,06619 85 251,8 1,7808 53,07547 86 251,75 1,782 53,08474 87 251,7 1,7832 53,09399 88 251,65 1,7844 53,10323 89 251,6 1,7856 53,11246 90 251,55 1,7868 53,12167 91 251,5 1,788 53,13087 92 251,45 1,7892 53,14006 93 251,4 1,7904 53,14924 94 251,35 1,7916 53,15841 95 251,3 1,7928 53,16756 96 251,25 1,794 53,1767 97 251,2 1,7952 53,18583 98 251,15 1,7964 53,19495 99 251,1 1,7976 53,20405 100 251,05 1,7988 53,21314
101 251 1,8 53,22222
102 250,97 1,8017 53,19143 103 250,94 1,8034 53,1607 104 250,91 1,8051 53,13002 105 250,88 1,8068 53,0994 106 250,85 1,8085 53,06884 107 250,82 1,8102 53,03834 108 250,79 1,8119 53,00789 109 250,76 1,8136 52,9775 110 250,73 1,8153 52,94717 111 250,7 1,817 52,9169 112 250,67 1,8187 52,88668 113 250,64 1,8204 52,85652 114 250,61 1,8221 52,82641 115 250,58 1,8238 52,79636 116 250,55 1,8255 52,76637 117 250,52 1,8272 52,73643 118 250,49 1,8289 52,70654 119 250,46 1,8306 52,67672 120 250,43 1,8323 52,64695 121 250,4 1,834 52,61723 122 250,37 1,8357 52,58757
D. Pengujian Data
Setelah membuat Artificial Neural Network pada MATLAB, penulis melakukan pengujian pada data untuk memastikan bahwa sistem yang telah dibuat sudah cerdas. Akan tetapi penulis tidak melakukan pengujian pada seluruha data yang dimasukkan. Sehingga diperoleh data 15 pengujian dari 200 data memiliki error sebagai berikut :
No Input Target Hasil Output Error
RPM Arus Tegangan Arus Tegangan Arus Tegangan
1 256 1,68 52,25 1,68 52,25 0 0
2 255,95 1,6812 52,26041 1,68 52,26 0,000714 7,83059E-06 3 255,9 1,6824 52,2708 1,687 52,27 -0,00273 1,5374E-05 4 255,85 1,6836 52,28118 1,687 52,28 -0,00202 2,26311E-05 5 255,8 1,6848 52,29155 1,688 52,29 -0,0019 2,96025E-05 6 255,75 1,686 52,3019 1,689 52,3 -0,00178 3,62889E-05 7 255,7 1,6872 52,31223 1,689 52,31 -0,00107 4,26915E-05 8 255,65 1,6884 52,32255 1,689 52,32 -0,00036 4,88107E-05 9 255,6 1,6896 52,33286 1,69 52,33 -0,00024 5,46473E-05 10 255,55 1,6908 52,34315 1,691 52,34 -0,00012 6,02021E-05
11 255,5 1,692 52,35343 1,692 52,35 0 6,54761E-05
E. Code Program
Berikut kode program yang diperoleh dari MATLAB:
val =
Neural Network object:
architecture:
numInputs: 1
numLayers: 2
biasConnect: [1; 1]
inputConnect: [1; 0]
layerConnect: [0 0; 1 0]
outputConnect: [0 1]
numOutputs: 1 (read-only)
numInputDelays: 0 (read-only)
numLayerDelays: 0 (read-only)
subobject structures:
inputs: {1x1 cell} of inputs
layers: {2x1 cell} of layers
outputs: {1x2 cell} containing 1 output
biases: {2x1 cell} containing 2 biases
inputWeights: {2x1 cell} containing 1 input weight
layerWeights: {2x2 cell} containing 1 layer weight
functions:
adaptFcn: 'trains'
gradientFcn: 'gdefaults'
initFcn: 'initlay'
performFcn: 'mse'
plotFcns: {'plotperform','plottrainstate','plotregression'}
trainFcn: 'trainlm'
parameters:
adaptParam: .passes
divideParam: .trainRatio, .valRatio, .testRatio
gradientParam: (none)
initParam: (none)
performParam: (none)
trainParam: .show, .showWindow, .showCommandLine, .epochs,
.time, .goal, .max_fail, .mem_reduc,
F. Langkah Kerja
Langkah yang harus dilakukan adalah :
1. Membuka software matlab terlebih dahulu
Gambar 1.1
2.
Memasukkan data input dan output pada workspace3. Mentranspose Input dan Output, dikarenakan penginputan dilakukan secara vertikal. dengan mengetikkan perintah “transpose” pada common windows
Gambar 1.3
4. Kemudian ketikkan “nntool” pada command windows untuk menampilkan network/data manager.
5. Menklik import pada neural network dan memasukkan input1 sebagi input dan output1 sebagai target data
Gambar 1.5
6. Kemudian klik new pada neural network untuk menampilkan creat network or data lalu ubah input data menjadi kelembaban dan target data sebagi kecepatan angin
7. Menklik network 1 pada neural network untuk menampilkan skema network 1
Gambar 1.7
8. Menklik train kemudiah memasukkan input1 sebagai input dan output1 sebagai target kemudian menklik train network untuk melatih data yang dimasukkan
Gambar 1.8
Gambar 1.9
9. Setelah itu export network1 untuk mengexport network1 ke workspace
Gambar 1.11
11. Ketikkan gensim(network1) pada command windows untuk bentuk dari Neural Network.
Gambar 1.13
12. Setelah itu untuk melakukan pengujian data dapat dilakukan dengan menambahkan display yang diperoleh dari Simulink Library, dan mengubah input sesuai dengan data ysng ingin diuji.
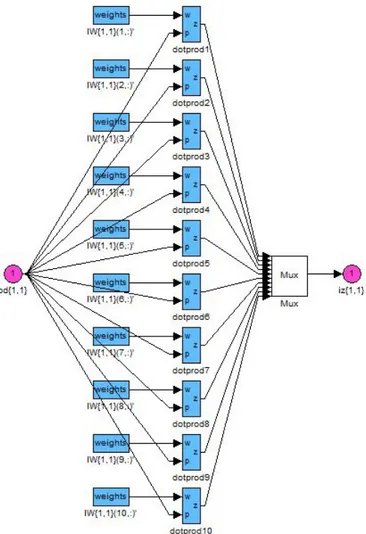
Berikut merupakan gambar dari Neural Network yang telah dibuat oleh penulis
Gambar 1.15 Bentuk Neural Network dari masing-masing Layer
G. Pembahasan
Rotary per minute atau revolution per minute ( revolusi per menit ) atau biasa disingkat dengan RPM. Umumnya digunakan oleh kendaraan bermotor seperti motor dan mobil. Angka yang ditunjukkan dengan berapa kali putaran ( revolusi ) poros engkol atau crank shaft mesin dalam hitungan waktu satu menit.
Putaran motor dipengaruhi oleh tegangan motor, arus jangkar, tahanan jangkar dan medan magnet. Jika salah satu besaran diabuat variabel dengan besaran lain tetap maka banyaknya putaran akan sebanding dengan besarnya besaran tersebut.
Dengan demikian jika tegangan dibuat variabel dan besaran lainya dibuat tetap maka, besarnya tegangan akan berbanding lurus dengan kecepatan putaran. Untuk mendapatkan putaran rendah diberi tegangan rendah dan untuk mendapatkan putaran tinggi tegangan harus tinggi. Dengan demikian, masalah yang harus diselesaikan pada rangkaian pengemudi motor adalah bagaimana membuat tegangan output dapat bervariasi (dapat diatur mulai dai 0 Volt hingga tegangan maksimum secara linier).
Dari data yang digunakan sebagai sampel, semakin besar input rpm pada motor maka arus dan tegangannya pun akan semakin besar. Selanjutnya untutuk dapat melakukan peramalan rpm terhadap arus dan tegangan, dilakukan cara kerja seperti yang telah tertulis di atas. Sehingga diperoleh data hasil output yang mendekati output target, dan error yang dihasilkan pun kecil. Dapat disimpulkan bahwa jaringan syaraf tiruan yang telah dibuat merupakan sistem yang cerdas karena memiliki error yang kecil.
Selanjutnya untuk pengujian jaringan syaraf tiruan sebagai peramalan rpm terhadap arus dan tegangan juga dapat dilakukan menggunakan data yang tidak terdapat pada data yang dimasukkan.
H. Kesimpulan
Setelah dilakukan pengujian terhadap jaringan syaraf tiruan dan diperoleh erro dengan persentase sangat kecil, maka dapat disimpulkan bahwa jaringan syaraf tiruan yang dibuat dapat dikatakan cerdas, dan dapat digunakan untuk peramalan rpm terhadap arus dan tegangan.
F. Daftar Pustaka
https://www.scribd.com/doc/99101485/Pengertian-Rpm