Sistem Pengendalian Suhu Menggunakan Kontroller Pid Dan Sistem Pengendalian Kelembaban Menggunakan Kontroller On/Off Pada Ruang Sauna
Bebas
14
0
0
Teks penuh
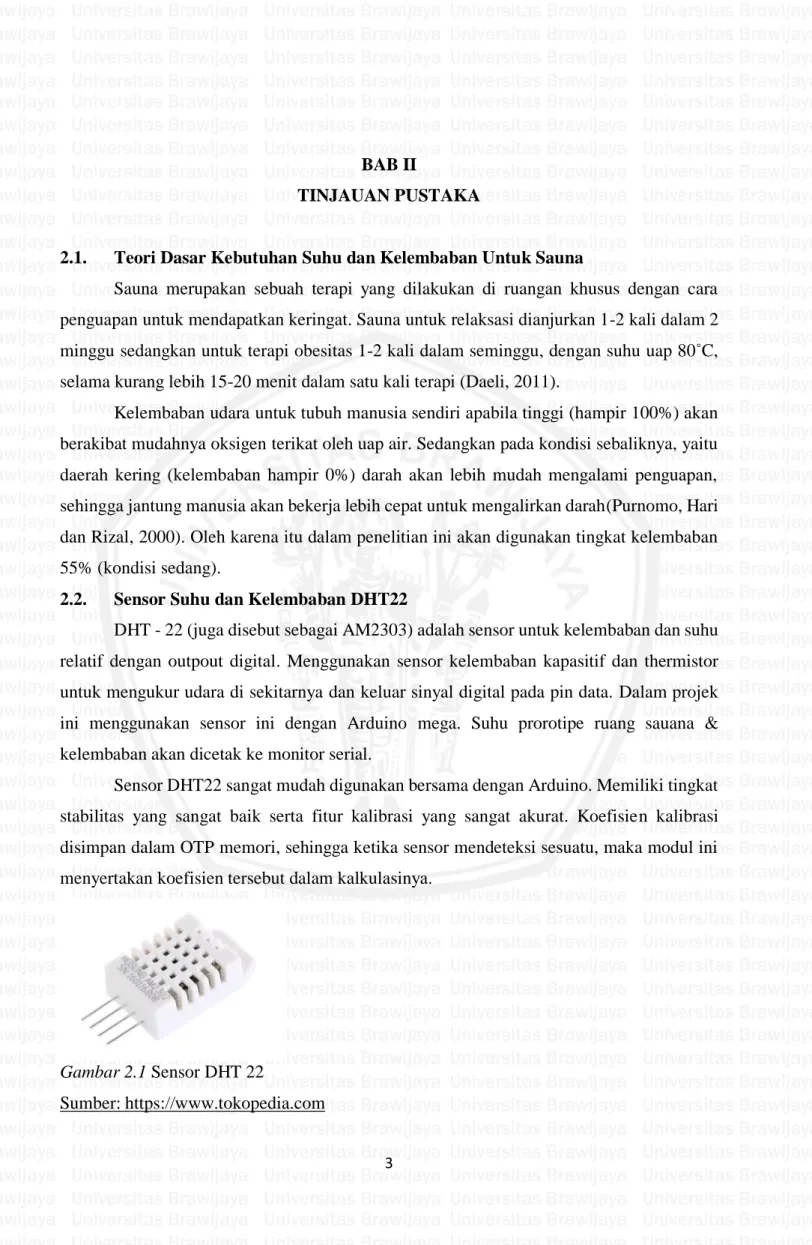
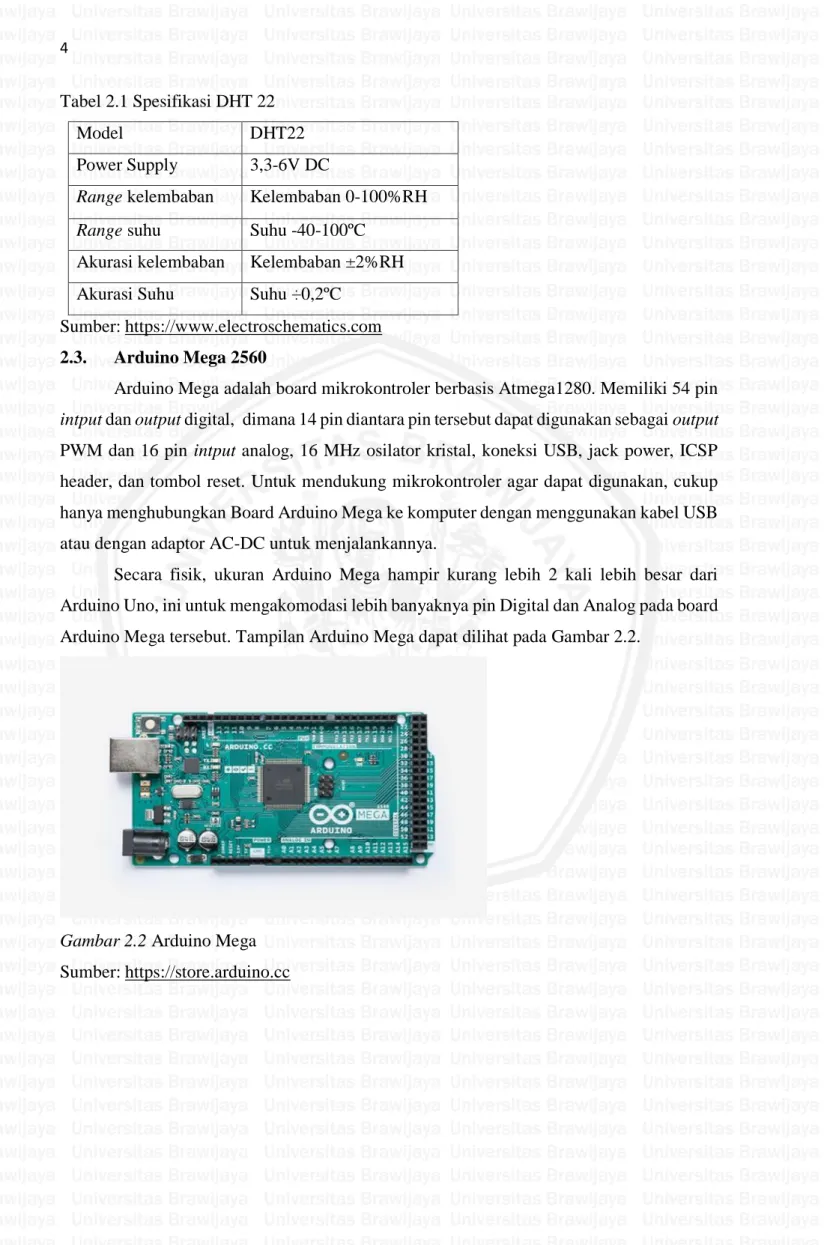
(2) 4. Tabel 2.1 Spesifikasi DHT 22 Model. DHT22. Power Supply. 3,3-6V DC. Range kelembaban. Kelembaban 0-100%RH. Range suhu. Suhu -40-100ºC. Akurasi kelembaban. Kelembaban ±2%RH. Akurasi Suhu. Suhu ÷0,2ºC. Sumber: https://www.electroschematics.com 2.3.. Arduino Mega 2560 Arduino Mega adalah board mikrokontroler berbasis Atmega1280. Memiliki 54 pin. intput dan output digital, dimana 14 pin diantara pin tersebut dapat digunakan sebagai output PWM dan 16 pin intput analog, 16 MHz osilator kristal, koneksi USB, jack power, ICSP header, dan tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya menghubungkan Board Arduino Mega ke komputer dengan menggunakan kabel USB atau dengan adaptor AC-DC untuk menjalankannya. Secara fisik, ukuran Arduino Mega hampir kurang lebih 2 kali lebih besar dari Arduino Uno, ini untuk mengakomodasi lebih banyaknya pin Digital dan Analog pada board Arduino Mega tersebut. Tampilan Arduino Mega dapat dilihat pada Gambar 2.2.. Gambar 2.2 Arduino Mega Sumber: https://store.arduino.cc.
(3) 5. Tabel 2.2 Penggunaan Pin Pada Arduino Mega No.. Pin. Fungsi. 1.. 2. Jalur masukan Zero Cross Interrupt. 2.. 4. Jalur keluaran untuk rangkaian dimmer. 3.. 8. DHT22. 4.. 9. DHT22. 5.. 10. DHT22. 6.. 11. Driver kipas. 7.. 12. Driver kipas. 8.. 13. Enable driver kipas. 9.. 31. Relay humidifier. 10.. 22. LCD pin. 11.. 24. LCD pin. 12.. 26. LCD pin. 13.. 28. LCD pin. 14.. 30. LCD pin. 15.. 32. LCD pin. 16.. 34. LCD pin. 17.. 3,3V. Vcc dimmer. 18. 5V. Vcc DHT22, driver kipas, humidifier, LCD. 19. GND Pin ground. 2.4.. Dimmer Rangkaian Dimmer berfungsi untuk mengatur panas dari kawat yang digunakan. sebagi pemanas di prorotipe ruang sauna ini. Sehingga kawat dapat menyesuaikan temperatur yang dibutuhkan pada prorotipe ruang sauna. Didalam rangkaian dimmer ini, terdapat 3 komponen penting guna mengatur kerja dimmer ini. Komponen TRIAC berfungsi untuk mengatur besaran tegangan AC yang masuk. Sementara komponen DIAC dan VR berfungsi untuk mengatur bias TRIAC guna mentukan titik on dan off pada komponen TRIAC..
(4) 6. Gambar 2.3 AC Dimmer Module Sumber: www.seeedstudio.com 2.4.1. Rangkaian TRIAC TRIAC atau Triode for Alternating Current (Trioda untuk arus bolak-balik) adalah. komponen yang tersusun atas dua buah thyristor antiparalel dengan terminal gate yang sama. Nama resmi untuk TRIAC adalah Bidirectional Triode Thyristor. Ini menunjukkan sakelar dwiarah yang dapat mengalirkan arus listrik ke kedua arah ketika dipicu (dihidupkan). Konfigurasi tersebut membuat TRIAC merupakan komponen yang digunakan untuk mengatur tegangan AC sehingga pemicuan dari gate TRIAC juga dapat dilakukan dengan pulsa negatif atau pulsa positif (sesuai tegangan AC) (Ardhito, 2013). Dalam penggunaannya dibutuhkan DIAC sebagai driver dari TRIAC. Selain itu dibutuhkan juga komponen yang mampu berfungsi sebagai isolator antara tegangan 220V dan 5V untuk melindungi mikrokontroler dari tegangan balik. Sehingga komponen yang sesuai dengan spesifikasi di atas adalah optocoupler. Optocoupler yang komponen utamanya berupa DIAC adalah MOC3022.. Gambar 2.4 Bentuk, Kontruksi, dan Simbol TRIAC Sumber: teknikelektronika.com 2.4.2. Rangkaian Zero Cross Detector Zero crossing detector adalah rangkaian yang digunakan untuk mendeteksi. gelombang sinus AC 220 volt saat melewati titik tegangan nol. Seberangan titik nol yang dideteksi adalah peralihan dari positif menuju negatif dan peralihan dari negatif menuju.
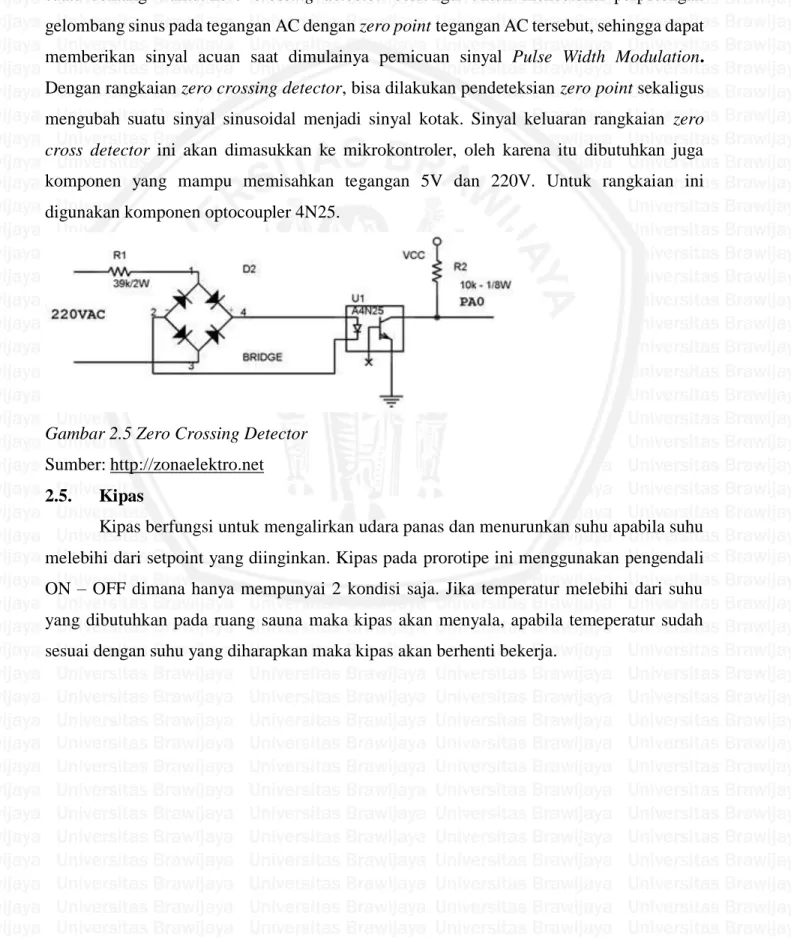
(5) 7. positif. Seberangan-seberangan titik nol ini merupakan acuan yang digunakan sebagai awal pemberian nilai waktu tunda untuk pemicuan TRIAC. Pada rangkaian zero cross detector dibutuhkan rangkaian yang bisa mendeteksi persimpangan antara gelombang tegangan bolak-balik dengan titik nol agar pengaturan fasa dapat dilakukan pada titik nol gelombang tegangan bolak-balik. Metode ini berfungsi untuk menentukan frekuensi suatu gelombang dengan cara mendeteksi banyaknya zero point pada suatu rentang waktu. Zero crossing detector berfungsi untuk mendeteksi perpotongan gelombang sinus pada tegangan AC dengan zero point tegangan AC tersebut, sehingga dapat memberikan sinyal acuan saat dimulainya pemicuan sinyal Pulse Width Modulation. Dengan rangkaian zero crossing detector, bisa dilakukan pendeteksian zero point sekaligus mengubah suatu sinyal sinusoidal menjadi sinyal kotak. Sinyal keluaran rangkaian zero cross detector ini akan dimasukkan ke mikrokontroler, oleh karena itu dibutuhkan juga komponen yang mampu memisahkan tegangan 5V dan 220V. Untuk rangkaian ini digunakan komponen optocoupler 4N25.. Gambar 2.5 Zero Crossing Detector Sumber: http://zonaelektro.net 2.5.. Kipas Kipas berfungsi untuk mengalirkan udara panas dan menurunkan suhu apabila suhu. melebihi dari setpoint yang diinginkan. Kipas pada prorotipe ini menggunakan pengendali ON – OFF dimana hanya mempunyai 2 kondisi saja. Jika temperatur melebihi dari suhu yang dibutuhkan pada ruang sauna maka kipas akan menyala, apabila temeperatur sudah sesuai dengan suhu yang diharapkan maka kipas akan berhenti bekerja..
(6) 8. Gambar 2.6 Kipas DC 12V Sumber: www.globalindustrial.com 2.6. LCD Liquid Crystal Display (LCD) adalah suatu jenis media tampil yang menggunakan kristal cair sebagai penampil utama. LCD sudah digunakan di berbagai bidang misalnya alat–alat elektronik seperti televisi, kalkulator ataupun layar komputer. Tipe LCD dot matrik dengan jumlah karakter 16*2. LCD sangat berfungsi sebagai penampil yang nantinya akan digunakan untuk menampilkan status kerja alat. Bentuk LCD 16*2 dapat dilihat dalam Gambar 2.6.. Gambar 2.7 Bentuk LCD 16*2 Sumber: engineersgarage.com 2.7.. Humidifier Humidifier berfungsi untuk menambah kelembaban dengan cara menyemburkan uap. air dari proses kavitasi. Aktuator yang digunakan berupa penambah kelembaban ruangan yang banyak terdapat dipasaran. Humidifier ini menggunakan pengendali ON – OFF..
(7) 9. Gambar 2.8 Humidifier USB Sumber : www.tokopedia.com 2.8.. Pengendali Sistem pengendalian dirancang untuk melakukan dan menyelesaikan tugas. tertentu.Syarat utama sistem pengendalian adalah harus stabil. Di samping kestabilan mutlak, maka sistem harus memiliki kestabilan secara relatif, yakni tolak ukur kualitas kestabilan sistem dengan menganalisis sampai sejauh mana batas-batas kestabilan sistem tersebut jika dikenai gangguan (Ogata K.,1997). Selain itu analisis juga dilakukan untuk mengetahui bagaimana kecepatan sistem dalam merespons input, dan bagaimana peredaman terhadap adanya lonjakan (over shoot). Suatu sistem dikatakan stabil jika diberi gangguan maka sistem tersebut akan kembali ke keadaan steady state di mana output berada dalam keadaan tetap seperti tidak ada gangguan. Sistem dikatakan tidak stabil jika outputnya berosilasi terus menerus ketika dikenai suatu gangguan. Karena suatu sistem pengendalian biasanya melibatkan penyimpanan energi maka output sistem ketika diberi suatu input, tidak dapat mengikuti input secara serentak, tapi menunjukkan respons transien berupa suatu osilasi teredam sebelum mencapai steady state. Dalam sistem pengendalian terdapat 2 macam loop: 1. Pengendalian dengan loop terbuka Sistem kontrol loop terbuka adalah sistem kontrol yang keluarannya tidak berpengaruh pada aksi pengontrolan. Jadi pada sistem kontrol loop terbuka, keluaran tidak diukur atau diumpan balikan untuk dibandingkan dengan masukan. 2. Pengendalian dengan loop tertutup Sistem kontrol loop tertutup adalah sistem kontrol yang keluarannya mempunyai pengaruh langsung pada aksi pengontrolan. Disebut juga sistem kontrol yang menggunakan umpan balik untuk memperkecil kesalahan sistem..
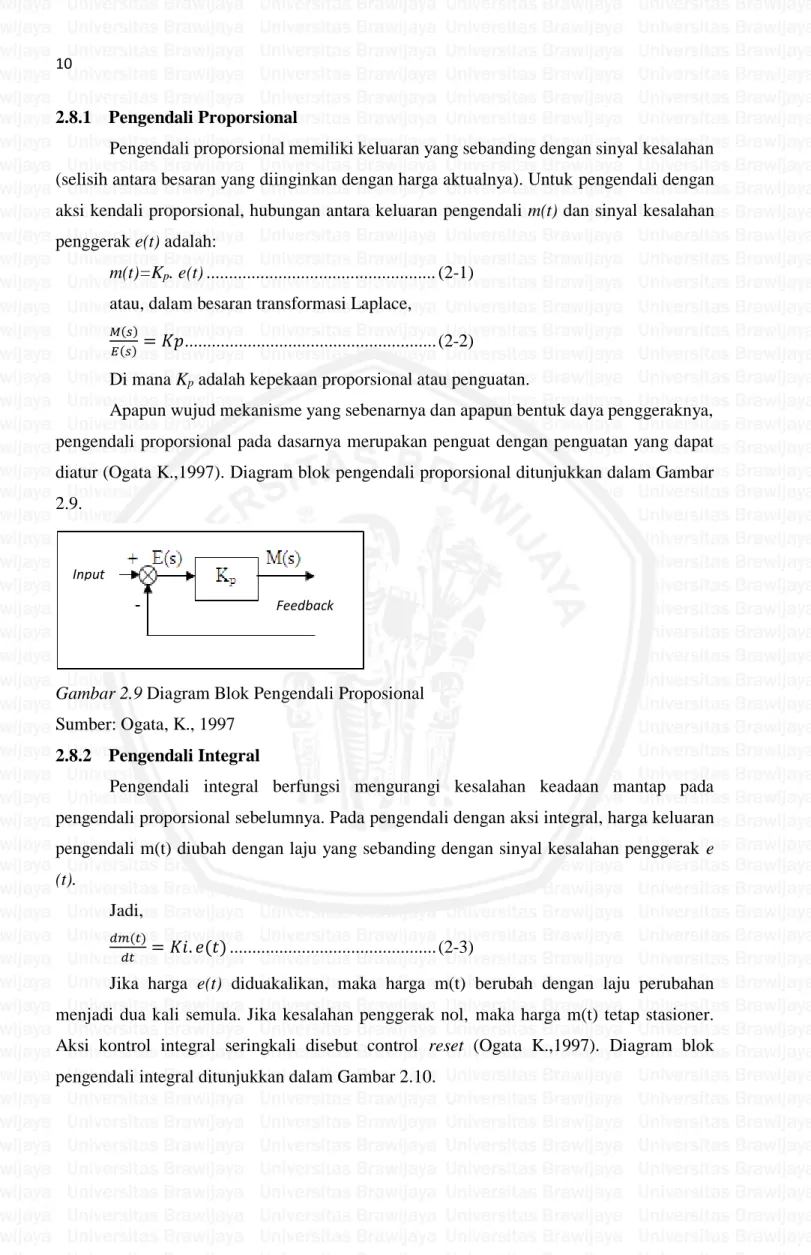
(8) 10. 2.8.1 Pengendali Proporsional Pengendali proporsional memiliki keluaran yang sebanding dengan sinyal kesalahan (selisih antara besaran yang diinginkan dengan harga aktualnya). Untuk pengendali dengan aksi kendali proporsional, hubungan antara keluaran pengendali m(t) dan sinyal kesalahan penggerak e(t) adalah: m(t)=Kp. e(t) ................................................... (2-1) atau, dalam besaran transformasi Laplace, 𝑀(𝑠) 𝐸(𝑠). = 𝐾𝑝........................................................ (2-2). Di mana Kp adalah kepekaan proporsional atau penguatan. Apapun wujud mekanisme yang sebenarnya dan apapun bentuk daya penggeraknya, pengendali proporsional pada dasarnya merupakan penguat dengan penguatan yang dapat diatur (Ogata K.,1997). Diagram blok pengendali proporsional ditunjukkan dalam Gambar 2.9.. Input Feedback. Gambar 2.9 Diagram Blok Pengendali Proposional Sumber: Ogata, K., 1997 2.8.2 Pengendali Integral Pengendali integral berfungsi mengurangi kesalahan keadaan mantap pada pengendali proporsional sebelumnya. Pada pengendali dengan aksi integral, harga keluaran pengendali m(t) diubah dengan laju yang sebanding dengan sinyal kesalahan penggerak e (t). Jadi, 𝑑𝑚(𝑡) 𝑑𝑡. = 𝐾𝑖. 𝑒(𝑡) .............................................. (2-3). Jika harga e(t) diduakalikan, maka harga m(t) berubah dengan laju perubahan menjadi dua kali semula. Jika kesalahan penggerak nol, maka harga m(t) tetap stasioner. Aksi kontrol integral seringkali disebut control reset (Ogata K.,1997). Diagram blok pengendali integral ditunjukkan dalam Gambar 2.10..
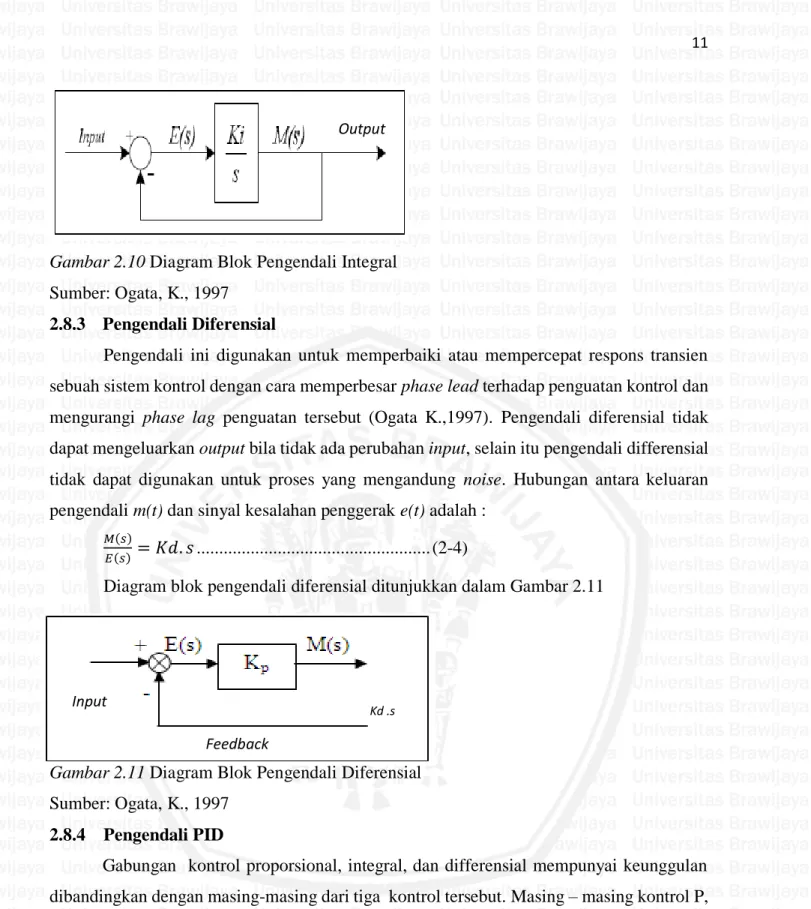
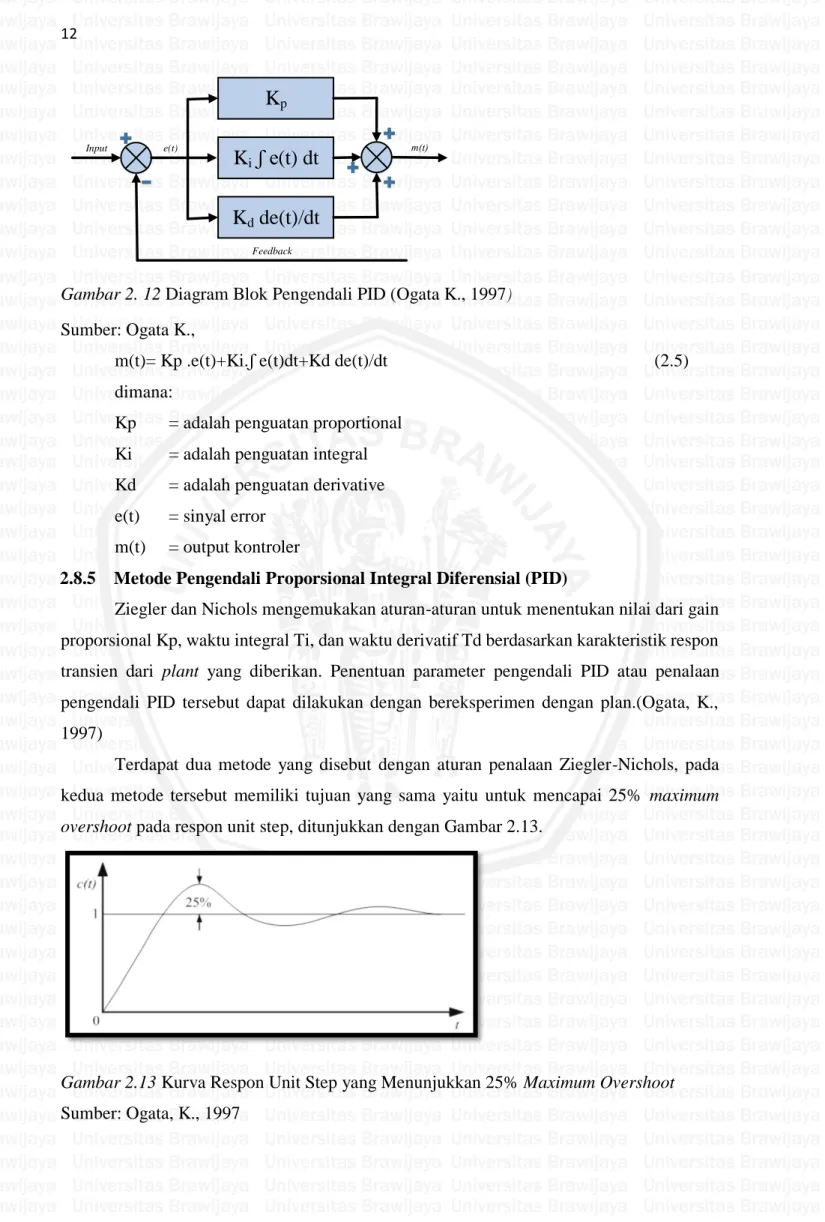
(9) 11. Output. Gambar 2.10 Diagram Blok Pengendali Integral Sumber: Ogata, K., 1997 2.8.3 Pengendali Diferensial Pengendali ini digunakan untuk memperbaiki atau mempercepat respons transien sebuah sistem kontrol dengan cara memperbesar phase lead terhadap penguatan kontrol dan mengurangi phase lag penguatan tersebut (Ogata K.,1997). Pengendali diferensial tidak dapat mengeluarkan output bila tidak ada perubahan input, selain itu pengendali differensial tidak dapat digunakan untuk proses yang mengandung noise. Hubungan antara keluaran pengendali m(t) dan sinyal kesalahan penggerak e(t) adalah : 𝑀(𝑠) 𝐸(𝑠). = 𝐾𝑑. 𝑠 .................................................... (2-4). Diagram blok pengendali diferensial ditunjukkan dalam Gambar 2.11. Input. Kd .s. Feedback. Gambar 2.11 Diagram Blok Pengendali Diferensial Sumber: Ogata, K., 1997 2.8.4. Pengendali PID Gabungan kontrol proporsional, integral, dan differensial mempunyai keunggulan. dibandingkan dengan masing-masing dari tiga kontrol tersebut. Masing – masing kontrol P, I, maupun D berfungsi untuk mempercepat reaksi sistem, menghilangkan offset, dan mendapatkan energy ekstra ketika terjadi perubahan load. Persamaan kontrol PID ini dapat dinyatakan dalam persamaan 2.5 : Ti adalah waktu integral dan Td adalah waktu derivatif. Gambar 2.12 menunjukkan diagram blok kontrol PID..
(10) 12. Kp Input. e(t). Ki ʃ e(t) dt Kd de(t)/dt Feedback. Gambar 2. 12 Diagram Blok Pengendali PID (Ogata K., 1997) Sumber: Ogata K., m(t)= Kp .e(t)+Ki.ʃ e(t)dt+Kd de(t)/dt. (2.5). dimana:. 2.8.5. Kp. = adalah penguatan proportional. Ki. = adalah penguatan integral. Kd. = adalah penguatan derivative. e(t). = sinyal error. m(t). = output kontroler. Metode Pengendali Proporsional Integral Diferensial (PID) Ziegler dan Nichols mengemukakan aturan-aturan untuk menentukan nilai dari gain. proporsional Kp, waktu integral Ti, dan waktu derivatif Td berdasarkan karakteristik respon transien dari plant yang diberikan. Penentuan parameter pengendali PID atau penalaan pengendali PID tersebut dapat dilakukan dengan bereksperimen dengan plan.(Ogata, K., 1997) Terdapat dua metode yang disebut dengan aturan penalaan Ziegler-Nichols, pada kedua metode tersebut memiliki tujuan yang sama yaitu untuk mencapai 25% maximum overshoot pada respon unit step, ditunjukkan dengan Gambar 2.13.. Gambar 2.13 Kurva Respon Unit Step yang Menunjukkan 25% Maximum Overshoot Sumber: Ogata, K., 1997.
(11) 13. 1. Metode Pertama Metode pertama atau sering disebut metode kurva reaksi, respon dari plan dapat diperoleh secara eksperimental dengan masukan berupa unit step, seperti yang ditunjukkan dengan Gambar 2.14.. Gambar 2.14 Respon Plant Terhadap Masukan Berupa Unit Step Sumber: Ogata, K. 1997 Jika dalam plan tersebut terdapat integrator atau dominan complex-conjugate poles, maka kurva respon unit step berbentuk seperti huruf S, seperti ditunjukkan dengan Gambar 2.14 jika respon tidak memberikan bentuk kurva S, maka metode ini tidak berlaku.(Ogata, K., 1997).. Gambar 2.15 Kurva Respon yang Berbentuk S Sumber: Ogata, K. 1997 Kurva berbentuk S tersebut dapat dikarakteristikkan menjadi dua konstanta yaitu waktu tunda L dan konstanta waktu T. Waktu tunda dan konstanta waktu ditentukan dengan menggambar sebuah garis tangen pada titik pembelokan dari kurva S, dan menentukan perpotongan antara garis tangen dengan sumbu waktu t dan sumbu c(t) =K, seperti yang telah ditunjukkan dalam Persamaan (2-6). Fungsi alih C(s)/U(s) dapat dilakukan pendekatan dengan sistem orde satu dengan persamaan sebagai berikut: 𝐶(s) U (𝑠). =. 𝐾𝑒 −𝐿𝑠 𝑇𝑠+1. ................. (2-6). Ziegler dan Nichols menyarankan untuk menentukan nilai-nilai dari Kp, Ti dan Td berdasarkan pada formula yang ditunjukkan dalam Tabel 2.3 (Ogata, K., 1997).
(12) 14. Tabel 2.3 Aturan Penalaan Ziegler-Nichols Berdasarkan Respon Unit Step Dari Plan Tipe 𝐾𝑝 𝑇𝑖 𝑇𝑑 Pengendali 𝑇 P ∞ 0 𝐿 𝑇 𝐿 PI 0 0,9 𝐿 0,3 𝑇 PID 2L 0,5 L 1,2 𝐿 Sumber: Ogata, K. 1997 2. Metode Kedua Dalam metode kedua ziegler-nichols, mula-mula yang dilakukan adalah membuat Ti = ∞ dan Td = 0. Kemudian hanya dengan menggunakan tindakan kontrol proporsional, harga ditingkatkan dari nol ke suatu nilai kritis Kcr, disini mula-mula keluaran memiliki osilasi yang berkesinambungan (Jika keluaran tidak memiliki osilasi berkesinambungan untuk nilai Kp manapun yang telah diambil, maka metode ini tidak berlaku). Dari keluaran yang berosilasi secara berkesinambungan, penguatan kritis Kcr dan periode Pcr dapat ditentukan. Diagram blok sistem loop tertutup dengan pengendali proporsional ditunjukkan dengan Gambar 2.16 dan untuk osilasi berkesinambungan dengan periode Pcr ditunjukkan dengan Gambar. Gambar 2.16 Sistem Loop Tertutup dengan Pengendali Proporsional Sumber: Ogata, K., 51997. Gambar 2.17 Osilasi Berkesinambungan dengan Periode Pcr Sumber : Ogata, K., 1997.
(13) 15. Ziegler dan Nichols menyarankan penyetelan nilai parameter Kp,Ti ,Td dan berdasarkan rumus yang diperlihatkan dalam Tabel 2.4(Ogata, K., 1997) Tabel 2.4 Aturan Dasar Ziegler-Nichols Berdasarkan Critical Gain Kcr dan Critical Period Pcr 𝐾𝑝. Tipe Pengendali P. 0.5 Kcr. PI. 0.45 Kcr. PID. 0.60 Kcr. 𝑇𝑖 ∞ 1 1,2. 𝑇𝑑 0. Pcr. 0.5 Pcr. 0 0.125 Pcr. Sumber : Ogata, K., 1997 2.9. PWM PWM (Pulse Width Modulation) digunakan untuk mengatur tegangan yang masuk. pada heater. Gambar 2.18 menunjukkan sinyal PWM untuk mengatur tegangan AC yang masuk pada heater.. Gambar 2.18 Pengaturan Tegangan AC dengan PWM Sumber: http://playground.arduino.cc 2.10. Elemen Pemanas Pemanas yang digunakan adalah heater 220 volt/ 600 watt. Bentuknya yang tidak. tertutup isolator dipilih karena cepat untuk memanaskan udara di sekitarnya. Pemasangan heater ini dengan cara dililitkan pada keramik kemudian diletakkan dibawah prototipe ruang sauna yang sudah diberikan lubang untuk menyalurkan panas ke dalam ruangan..
(14) 16. Gambar 2.19 Elemen Pemanas yang dililitkan pada Keramik.
(15)
Gambar

+7
Dokumen terkait
