INSTITUT TEKNOLOGI PADANG
https://e-journal.itp.ac.id/index.php/jtm e-ISSN: 2598-8263
Vol. 10, No. 1, April 2020 p-ISSN: 2089-4880
Published by Lembaga Penelitian dan Pengabdian Masyarakat (LP2M) - ITP
Sistem Kendali Mesin Pemotong Rumput
Berbasis Arduino Menggunakan Koneksi Bluetooth
Android-Based Control System of Lawn Mower Using Bluetooth Connection
Asmara Yanto 1*, Anrinal 1, Prasetyo Subekti 2
1 Department of Mechanical Engineering, Institut Teknologi Padang
2 Undergraduated Program of Mechanical Engineering, Institut Teknologi Padang Jl. Gajah Mada Kandis Nanggalo, Padang, Indonesia
doi.10.21063/jtm.2020.v10.i1.33-40
Correspondence should be addressed to [email protected]
Copyright © 2020 A. Yanto. This is an open access article distributed under the CC BY-NC-SA 4.0.
Article Information Abstract
Received:
March 12, 2020 Revised:
April 5, 2020 Accepted:
April 12, 2020 Published:
April 30, 2020
The purpose of this research is to build and test the android-based control system of lawn mower using bluetooth connection. The lawn mower has 4 DC motor actuators, where a DC motor for moving the rear wheels that serves to move the lawn mower back and forth, a DC motor to drive the front wheels that serves to turn the lawn mower, a DC motor to adjust the cutting blade elevation and a DC motor for turning the cutter blade. The four DC motors are controlled by Arduino. The command or input to control the motion of the mower is sent via android with bluetooth connection to arduino. The lawn mower control system testing is carried out to cut the grass. From the tests was conducted, it can be concluded that the lawn mower control system works well.
Keywords: lawn mower, control system, arduino, bluetooth, android
1. Pendahuluan
Mesin pemotong rumput adalah jenis mesin yang telah banyak digunakan oleh orang dimanapun. Dengan menggunakan mesin pemotong rumput ini, pekerjaan akan lebih ringan dan lebih cepat. Namun, pisau dari mesin pemotong rumput dapat membahayakan operatornya dan ketinggian pisau pemotong pada pemotongan rumput tidak dapat diatur konstan sehingga hasil pemotongan sangat bergantung kepada keahlian operatornya. Oleh karena itu, perlu diterapkan suatu sistem kontrol agar mesin pemotong rumput dapat dioperasikan tanpa membahayakan operatornya dan dapat pula melakukan pemotongan rumput dengan ketinggian yang merata.
Paala et. al.
[1] telah merancang mesinpemotong rumput untuk membersihkan
lapangan sekolah dengan cara yang lebih mudah, lebih cepat, lebih aman dan lebih hemat biaya. Mesin ini memiliki perangkat keras berikut: mikrokontroler Arduino Uno, modul Bluetooth HC-05, modul WIFI, dua motor wiper 12 volt penggerak roda, motor blade EBike 24 volt, driver motor, roda kastor, saklar dan dua 12 volt 7 Ampere yang dapat diisi ulang baterai asam timbal yang terhubung secara seri. Perangkat dapat digunakan menggunakan ponsel Android dengan Aplikasi ENIRO yang diinstal.
Aplikasi ENIRO dibangun menggunakan
Inventor Aplikasi MIT. Dalam
mengendalikan mesin pemotong rumput,
koneksi Bluetooth dan WIFI dapat
digunakan. Jarak maksimum Bluetooth
hingga 58 meter atau 190 kaki. Jarak maksimum koneksi WIFI hingga 152 meter atau 500 kaki. Jika terus menerus menggunakan perangkat hingga dua jam, luas rumput yang dipangkas adalah 30 meter kali 20 meter.
Ramachandran et. al. [2] telah mengembangkan mesin pemotong rumput semi-otomatis yang dapat menjadi pengganti mesin pemotong rumput manual komersial yang sedang digunakan secara luas. Perangkat ini tidak memerlukan tenaga kerja apa pun untuk operasi mereka, ini dapat dioperasikan oleh perangkat android. Mesin ini dapat dioperasikan dengan menggunakan baterai atau sumber tenaga surya.
Derander et. al [3] telah membuat rototipe mesin pemotong rumput yang dinavigasi tanpa kabel. Sebagai gantinya ia menggunakan kombinasi kamera, GPS, dan sensor ultrasonik.
Prototipe dapat bernavigasi secara memadai di area tertutup dan mendeteksi hambatan. Akan tetapi, mesin tidak dapat mendeteksi tepi non fisik misalnya garis property yang tidak terlihat Kesimpulan yang dicapai adalah bahwa teknik yang digunakan berguna untuk mengembang- kan mesin atau robot pemotong rumput. Tetapi, teknik ini masih membutuhkan beberapa penyesuaian. Khususnya GPS perlu diganti atau ditingkatkan untuk mendapatkan deteksi tepi dengan benar.
Rao et. al [4] telah menggunakan energi surya dalam proses pemotongan rumput halaman. Mesin pemotong rumput dikontrol ganda yaitu oleh PC dan modul Bluetooth.
Pengontrol PC menggunakan sistem pemantauan waktu nyata oleh perangkat lunak LabView. LabView digunakan untuk cakupan langsung dari halaman / bidang bersama dengan nilai-nilai tegangan yang dikembangkan dalam sel fotovoltaik. Sistem pemantauan waktu nyata telah membantu memanfaatkan matahari secara efisien dari penelitiannya ini.
Yusup, dkk [5] merancang dan menguji model alat pemotong rumput otomatis berbasis mikrokontroler AT89C51sebagai pengem- bangan dari alat pemotong rumput manual.
Route perjalanan alat ini berbentuk zig-zag dengan sudut belok sebesar 180 derajat.
Rancangan sistem ini terdiri dari keypad sebagai peripheral input untuk memasukkan data area rumput yang akan dipotong yaitu berupa jarak tempuh dan jumlah belok yang dilakukan oleh alat, sensor putaran roda untuk menghitung jarak yang ditempuh, kendali motor untuk mengendalikan arah putaran motor
DC untuk arah maju dan mundur, motor DC untuk arah belok kanan dan belok kiri, dan motor DC untuk pemotong rumput. Setting jarak, jumlah belok, dan jarak yang ditempuh oleh alat ketika berjalan ditampilkan oleh rangkaian display yang terdiri dari seven segment dan decoder BCD ke seven segment.
Hasil pengujian berupa perbandingan jarak tempuh dengan setting pada keypad, jumlah belok yang dilakukan dengan setting pada keypad, dan sudut belok yang dilakukan oleh pemotong rumput. Perbandingan setting keypad dengan jarak yang ditempuh oleh alat adalah linear dan jarak yang diinginkan dapat diperoleh. Alat ini mempunyai ketepatan sudut belok kanan untuk mencapai sudut 180o adalah 95,7% dan ketepatan sudut belok kiri 98%.
Aryani, dkk [6] telah mengembangkan robot cerdas tunggal memotong rumput berbasis Pi B + raspberry. Aplikasi sistem robotik ini bertujuan untuk mengendalikan 2 motor Driver l298n yang berguna untuk menjalankan gear boxwheel robot dan pemotong rumput pada alat pemotong rumput tanpa operator. Bahasa pemrograman yang digunakan adalah bahasa yang dijalankan dengan pyton Apache Web Server. Desain prototipe robot cerdas pemotong rumput rasber Pibased B + ini menggunakan browser web pada saat rumput sudah mulai tumbuh tinggi, Intelejen robot akan memerintahkan pemotongan rumput dapat dilakukan melalui browser web yang terkontrol.
Penelitian-penelitian sejenis lainnya dapat diihat di referensi [7], [8], [9] dan [10].
2. Metode
A. Mesin Pemotong Rumput
Performa fisik mesin pemotong rumput yang digunakan pada penelitian ini dapat dilihat pada Gambar 1.
Gambar 1. Mesin pemotong rumput
Mesin pemotong rumput yang dikontrol disini adalah jenis mesin pemotong rumput daratan yang bergerak dengan menggunakan dua buah roda depan dan dua buah roda belakang. Kedua roda depan terhubung dengan kendali steering roda depan dan kedua roda belakang terhubung dengan poros transmisi roda belakang. Pisau pemotong mesin ini terhubung pada sistem pengerak motor baik untuk naik-turun maupun untuk berputar.
B. Rancangan Sistem Kendali
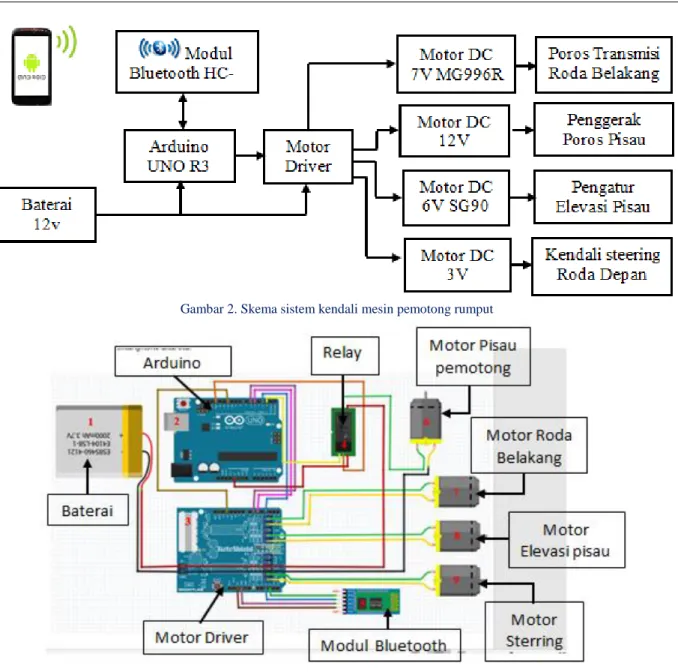
Berdasarkan konstruksi mesin pemotong rumput yang digunakan pada penelitian ini, maka dapat dibuat sebuah sistem kendali mesin dengan skema seperti pada Gambar 2.
Rangkaian sistema kendali secara menyeluruh dapat dilihat pada Gambar 3.
Gambar 2. Skema sistem kendali mesin pemotong rumput
Gambar 3. Rangkaian sistem kendali mesin pemotong rumput
Adapun baterai yang digunakan adalah baterai dengan spesifikasi berikut:
Jenis : kering
Tegangan nominal : 12 volt
Kapasitas yang ternilai : 17 Ah
Panjang : 181 mm
Lebar : 76 mm
Tinggi : 167 mm
Arduino yang dipakai adalah jenis UNO R3, motor driver yang digunakan adalah jenis
L293D, modul bluetoothnya adalah jenis
HC-05. Relay yang dipakai adalah relay
5V 1 channel. Sedangkan masing-masing
motor yang digunakan disini dengan
spesifikasi sebagai berikut:
Motor DC pengendali steering roda depan:
Vsuplai : 3 VDC
Arus : 500 mA
Dimensi : L 2.5 cm x D 2 cm
Motor penggerak poros roda belakang
V suplai : 4.8V - 7.2V
Operating speed : 0.20 s/60 deg (4.8V)
Torsi : 10 kg.cm
Dimensi : 40.7x19.7x42.9 mm
Shaft : L 0.4 cm x D 0.4 cm
Motor pemutar pisau pemotong:
Tegangan : 12- 14 Volt
Berat : 0.13 kg
Diameter motor : 30 mm
Panjang : 47 mm
Diameter shaft : 3 mm
Panjang shaft : 8 mm
Motor pengatur elevasi pisau pemotong:
No load speed : 0.12 s/ 60 deg (4.8V)
Stall Torque : 1.6 kg/cm (4.8V)
Operating Temp. : -30 ~ +60
oC.
Op. Voltage : 4.8V - 6V.
Working Current : less than 500 mA.
Gambar 4. Tampilan awal panel pengendali mesin pemotong rumput pada Android
Gambar 5. Panel utama pengendali mesin pemotong rumput pada Android
3. Hasil dan Pembahasan
A. Panel Pengendali pada Android
Tampilan awal panel pengendali mesin pemotong rumput pada Android dapat dilihat pada Gambar 4 dan panel utama pengendali mesin pemotong rumput dapat dilihat pada Gambar 5. Panel pengendali ini dibuat dengan
perangkat lunak MIT App Inventor. secara daring. Pada panel pengendali ini terdapat
7
jenis perintah yang dapat dikirimkan ke
modul bluetooth, yaitu maju, mundur, belok
kanan, belok kiri, pisau diangkat, pisau
diturunkan dan pisau on/off.
B. Pengujian Sistem Kendali
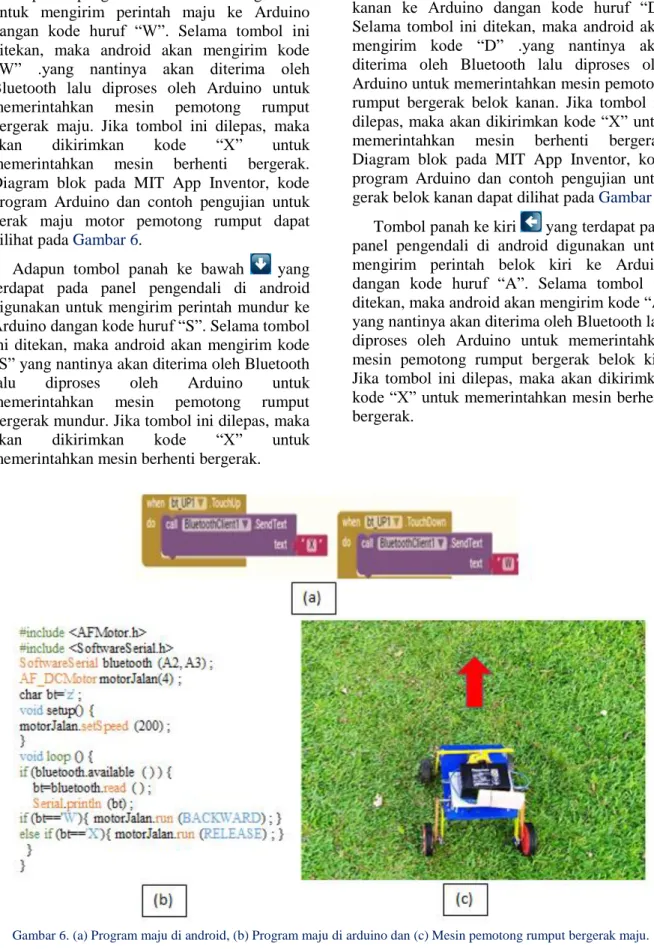
Tombol panah ke atas yang terdapat pada panel pengendali di android digunakan untuk mengirim perintah maju ke Arduino dangan kode huruf “W”. Selama tombol ini ditekan, maka android akan mengirim kode
“W” .yang nantinya akan diterima oleh Bluetooth lalu diproses oleh Arduino untuk memerintahkan mesin pemotong rumput bergerak maju. Jika tombol ini dilepas, maka akan dikirimkan kode “X” untuk memerintahkan mesin berhenti bergerak.
Diagram blok pada MIT App Inventor, kode program Arduino dan contoh pengujian untuk gerak maju motor pemotong rumput dapat dilihat pada Gambar 6.
Adapun tombol panah ke bawah yang terdapat pada panel pengendali di android digunakan untuk mengirim perintah mundur ke Arduino dangan kode huruf “S”. Selama tombol ini ditekan, maka android akan mengirim kode
“S” yang nantinya akan diterima oleh Bluetooth lalu diproses oleh Arduino untuk memerintahkan mesin pemotong rumput bergerak mundur. Jika tombol ini dilepas, maka akan dikirimkan kode “X” untuk memerintahkan mesin berhenti bergerak.
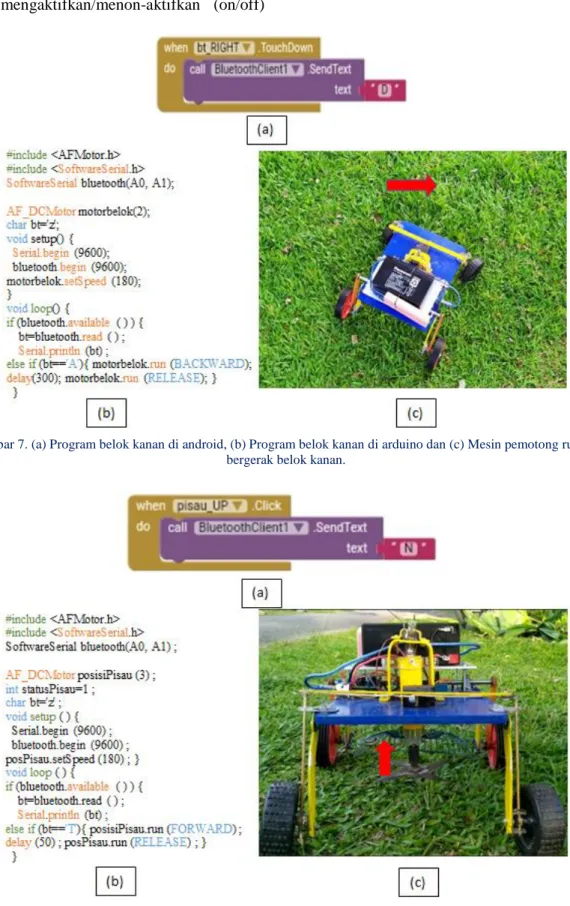
Sedangkan tombol panah ke kanan yang terdapat pada panel pengendali di android digunakan untuk mengirim perintah belok kanan ke Arduino dangan kode huruf “D”.
Selama tombol ini ditekan, maka android akan mengirim kode “D” .yang nantinya akan diterima oleh Bluetooth lalu diproses oleh Arduino untuk memerintahkan mesin pemotong rumput bergerak belok kanan. Jika tombol ini dilepas, maka akan dikirimkan kode “X” untuk memerintahkan mesin berhenti bergerak.
Diagram blok pada MIT App Inventor, kode program Arduino dan contoh pengujian untuk gerak belok kanan dapat dilihat pada Gambar 7.
Tombol panah ke kiri yang terdapat pada panel pengendali di android digunakan untuk mengirim perintah belok kiri ke Arduino dangan kode huruf “A”. Selama tombol ini ditekan, maka android akan mengirim kode “A”
yang nantinya akan diterima oleh Bluetooth lalu diproses oleh Arduino untuk memerintahkan mesin pemotong rumput bergerak belok kiri.
Jika tombol ini dilepas, maka akan dikirimkan kode “X” untuk memerintahkan mesin berhenti bergerak.
Gambar 6. (a) Program maju di android, (b) Program maju di arduino dan (c) Mesin pemotong rumput bergerak maju.
Tombol digunakan untuk mengirim perintah menaikkan pisau pemotong dangan
kode huruf “N”. Jika tombol tersebut ditekan maka android akan mengirim kode “N” yang nantinya akan diterima oleh Bluetooth agar
pisau pemotong rumput bergerak naik.
Sedangkan tombol digunakan untuk mengirim perintah menurunkan pisau pemotong dangan kode huruf “T”. Jika tombol tersebut ditekan maka android akan mengirim kode “T”
yang nantinya akan diterima oleh Bluetooth agar pisau pemotong rumput bergerak turun.
Untuk mengaktifkan/menon-aktifkan (on/off)
putaran pisau pemotong digunakan tombol power . Diagram blok pada MIT App Inventor, kode program Arduino dan contoh pengujian untuk contoh gerak pisau naik dapat dilihat pada Gambar 8.
Gambar 7. (a) Program belok kanan di android, (b) Program belok kanan di arduino dan (c) Mesin pemotong rumput bergerak belok kanan.
Gambar 8. (a) Program pisau naik di android, (b) Program pisau naik di arduino dan (c) Pisau pemotong bergerak naik.
Pengujian sistem dilakukan untuk mengetahui apakah sistem kendali yang telah diterapkan ke mesin pemotong rumput dapat bekerja dengan baik. Pengujian dilakukan di lapangan yang berumput dengan hasil pengujian secara lengkap dapat dilihat pada Table 1. Sedangkan untuk pemotongan rumput diperoleh hasil seperti pada Tabel 2.
Tabel 1. Hasil pengujian sistem kendali dilihat dari gerak mesin pemotong runput yang dikendalikan.
No Kendali Gerak Hasil Pengujian
1 Maju Berhasil
2 Mundur Berhasil
3 Belok kanan Berhasil
4 Belok kiri Berhasil
5 Pisau pemotong naik Berhasil 6 Pisau pemotong turun Berhasil 7 Pisau pemotong on/off Berhasil
Tabel 2. Hasil pengujian sistem kendali dilihat dari proses pemotongan runput.
No Area (m2)
Waktu (detik)
Tinggi Mata Pisau
(cm)
Tinggi rumput (cm)
1 1 105 1.5 3 cm
2 1 168 4.5 6 cm
3 1 140 3.0 5 cm
Pada pengujian pertama dilakukan pemotongan rumput gajah besar. Rumput ini memiliki tinggi sekitar 3 cm. Luas rumput yang dipotong sekitar 1 m2. Pemotongan rumput ini dilakukan dengan menyetel tinggi pisau pemotong 1.5 cm dari permukaan tanah. Dari pengujian pertama ini diperoleh waktu pemotongan rata-rata 105 detik. Kemudian pada pengujian kedua dengan tinggi penyetelan mata pisau 4,5 cm dari permukaan tanah, tinggi rumput 6 cm dan luas pemotongan yaitu 1 m2. Dari pengujian kedua diperoleh waktu pemotongan selama 168 detik. Jenis rumput yang dipotong yaitu rumput gajah besar dan rumput teki. Berbeda dengan pengujian pertama pada pengujian ini tinggi rumput yang dipotong dan juga medan yang dilalui oleh mesin sedikit berlubang yang membuat roda belakang dari mesin pemotong rumput ini sedikit slip. Lalu pada pengujian ketiga dengan tinggi penyetelan mata pisau dari permukaan tanah 3 cm. jenis rumput yang di potong adalah rumput gajah besar yang bercampur dengan rumput teki.
Rumput yang dipotong memiliki ketinggian 5 cm dengan luas pemotongan 1 m2 dengan
waktu pemotongan yaitu 140 detik, Dari ketiga pengujian pemotongan rumput diperoleh kemampuan pemotongan rumput rata-rata sebesar 0.4358 m2/min dengan tinggi rumput rata-rata 4.67 cm.
4. Simpulan
Berdasarkan hasil pembuatan dan pengujian sistem kendali mesin pemotong rumput dapat disimpulkan hal-hal berikut:
1. Sistem kendali pada mesin pemotong rumput berbasis mikrokontroler menggunakan Android dengan koneksi bluetooth telah berhasil dirakit dengan baik.
2. Mesin pemotong rumput dapat bergerak sesuai dengan perintah yaitu: maju, mundur, belok kanan, belok kiri, pisau naik, pisau turun dan mesin on/off.
3. Mesin pemotong rumput akan bergerak untuk memotong rumput sesuai dengan pengendalian dari pengguna dengan panel kendali/navigasi pada Android.
4. Dari pengujian yang telah dilakukan maka dapat disimpulkan bahwa hasil pemotongan rumput tergantung kepada jenis rumput, dan area pengujian. Pada penelitian ini, diperoleh kemampuan pemotongan rumput rata-rata sebesar 0.4358 m2/min dengan tinggi rumput rata-rata 4.67 cm.
Referensi
[1] N.M.A. Paala, N.M.M. Garcia, R.A.
Supetran and M.E.LB. Fontamilas (2019): “Android Controlled Lawn Mower Using Bluetooth and WIFI Connection”, IEEE 4th International Conference on Computer and Communication Systems (ICCCS), Singapore, 2019.
[2] N. Ramachandran, N.N. Kumar, S.K.
Rajeshwaran, R. Jeyaseelan R and S.S Harrish (2019): “Design And Fabrication Of Semi-Automated Lawn Mower”, International Journal of Innovative Technology and Exploring Engineering (IJITEE), ISSN: 2278-3075, Volume-8 Issue-10, August 2019.
[3] J.M. Derander, P. Andersson, E.
Wennerberg and A. Nitsche (2018):
“Smart robot lawn mower”, Department of Computer Science and Engineering Chalmers University of Technology
University of Gothenburg Gothenburg, Sweden.
[4] B.H. Rao, K. Varm, S. Jainwar and H.
Tamrakar (2016): “Bluetooth Cum Pc Controlled Solar Lawn Mower With Real”, International Research Journal of Engineering and Technology (IRJET), Volume: 03 Issue: 09, pp.786-790.
[5] Yusup, M. Arkanuddin dan T. Sutikno (2015):” Perancangan Model Alat Pemotong Rumput Otomatis Berbasis Mikrokontroler AT89C51”, urnal Ilmiah Teknik Elektro Komputer dan Informatika, Vol. 1, No.1, pp.21-32.
[6] D. Aryani, M. Wahyudin, and M. Fazri,
“Prototype Robot Cerdas Pemotong Rumput Berbasis Raspberry Pi B+
Menggunakan Web Browser”, Journal CERITA, vol. 1, no. 1, pp. 1-10, Feb.
2015.
[7] P. Harahap, Cholish dan A.K. Zaman,
“Perancangan Alat Pemotong Rumput Otomatis Berbasis Arduino Uno Memakai Joystick”, Prosiding Seminar Nasional Teknik Elektro ISBN. 978-602- 8692-34-2, Batu-Malang, 11-13 Oktober 2018, pp.181-184.
[8] F.D. Muhammad, “Perancangan Prototipe Mesin Pemotong Rumput Taman Yang Dikendalikan Menggunakan Smartphone Via Bluetooth”, Program Studi D3 Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember, Surabaya, 2016.
[9] L.N. Wonokusumo, “Mesin Pemotong Foil Otomatis”, Jurnal Teknik Elektro, Vol. 9, No. 1, 2016, pp.8-12.
[10] H. Wijaya, “Pemotong Rumput Elektrik”, Program Studi Teknik Elektronika, Politeknik Negeri Batam, 2014.