7 2.1 SISTEM TENAGA LISTRIK [1]
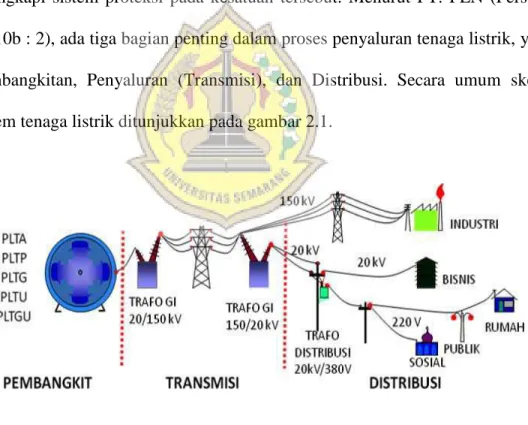
Sistem tenaga listrik merupakan suatu kesatuan yang terintegrasi mulai dari unit pembangkit listrik, unit transmisi listrik, sampai unit distribusi listrik dalam upaya menyalurkan listrik dari produsen kepada konsumen dengan dilengkapi sistem proteksi pada kesatuan tersebut. Menurut PT. PLN (Persero) (2010b : 2), ada tiga bagian penting dalam proses penyaluran tenaga listrik, yaitu Pembangkitan, Penyaluran (Transmisi), dan Distribusi. Secara umum skema sistem tenaga listrik ditunjukkan pada gambar 2.1.
Gambar 2.1 Sistem Tenaga Listrik
Sumber : http://ehendra.wordpress.com/stl-01/
[1](Adib Gustian Nigara, Analisis Aliran Daya Sistem Tenaga Listrik : 2015 :Hal 6)
Komponen dasar yang membentuk suatu sistem tenaga listrik adalah generator, transformator, saluran transmisi dan beban.Untuk keperluan analisis sistem tenaga, diperlukan suatu diagram yang dapat mewakili setiap komponen sistem tenaga listrik tersebut. Diagram yang sering digunakan adalah diagram satu garis dan diagram impedansi atau diagram reaktansi. Gambar 2.2 merupakan diagram satu garis sistem tenaga listrik yang sederhana. [2]
Pembangkit trafo step up Penghantar trafo step down
Sistem distribusi
Gambar 2.2 Diagram Satu Garis Sistem Tenaga Listrik
2.2 STUDI ALIRAN DAYA [2]
Studi aliran daya mengungkapkan kinerja dan aliran daya (nyata dan reaktif) untuk keadaan tertentu tatkala sistem bekerja saat tunak (steady state).
Studi aliran daya juga memberikan informasi mengenai beban saluran transmisi di sistem, tegangan di setiap lokasi untuk evaluasi regulasi kinerja sistem tenaga dan bertujuan untuk menentukan besarnya daya nyata (real power), daya reaktif (reactive power) di berbagai titik pada sistem daya yang dalam keadaan
[2](Ferry Jusmedy, Studi Aliran Daya Sistem 115 KV : 2007 :Hal 9)
G
berlangsung atau diharapkan untuk operasi normal. Studi aliran daya merupakan studi yang penting dalam perencanaan dan desain perluasan sistem tenaga listrik dan menentukan operasi terbaik pada jaringan yang sudah ada. Studi aliran daya sangat diperlukan dalam perencanaan serta pengembangan sistem di masa-masa yang akan datang. Seiring dengan bertambahnya konsumen akan kebutuhan tenaga listrik, maka akan selalu terjadi perubahan beban, perubahan unit-unit pembangkit, dan perubahan saluran transmisi. [2]
Menurut Ir. Sulasno, 1993, kegunaan studi analisis aliran daya ini antara lain adalah sebagai berikut: [3]
1. Untuk mengetahui tegangan-tegangan pada setiap simpul yang ada.
2. Untuk mengetahui semua peralatan apakah memenuhi batas-batas yang ditentukan untuk menyalurkan daya yang diinginkan.
3. Untuk memperoleh kondisi mula pada perencanaan sistem yang baru.
4. Pada hubung singkat, stabilitas, dan pembebanan ekonomis.
Untuk melakukan perhitungan aliran daya, diperlukan data-data untuk menganalisisnya. Referensi data yang diperlukan antara lain : [4]
1. Data Saluran
Data yang diperoleh dari diagram segaris (single line diagram) 2. Data Bus
Data bus yang diperlukan adalah besaran daya, tegangan, arus, sudut fasa
[3](Sulasno, Analisis Sistem Tenaga Listrik :1993: Hal12)
[4](Prabowo, Analisis Aliran Daya PT. PLN UPT Semarang :2007 :Hal16)
3. Data Spesifikasi
Data yang didapat dari rating-rating setiap komponen, type komponen, merk komponen, frekuensi, dan data asli dari setiap komponen.
Pada umumnya, perhitungan aliran daya diasumsikan sistem dalam keadaan seimbang. Data dan informasi yang didapatkan berguna dalam merencanakan perluasan sistem tenaga listrik dan dalam menentukan operasi terbaik untuk sistem jaringan kelistrikan. Perencanaan sistem aliran daya listrik industri meliputi beban terpasang dan beban operasi pada industry tersebut, sehingga dapat diperhitungkan besarnya daya pada transformator yang dibutuhkan, jadi dengan perencanaan yang baik dan matang maka aliran daya listrik pada sistem tersebut dapat sesuai dengan kebutuhan pemakaian energi listrik, serta mengurangi terjadinya losses. Menentukan perencanaan operasi terbaik dari sistem aliran daya listrik meliputi pengontrolan alokasi daya reaktif yang optimal.
Studi aliran daya membutuhkan parameter-parameter dengan besaran yang dalam keadaan tetap (stabil). Beban yang berupa mesin-mesin yang tidak berputar, kecil pengaruhnya terhadap arus saluran pada waktu terjadinya gangguan, oleh karena itu biasanya diabaikan. Beban yang berupa motor serempak selalu dimasukkan dalam perhitungan aliran daya listrik.
Berdasarkan beban yang bekerja dapat dibagi menjadi dua golongan yaitu;
beban statis (static load) dan beban campuran antara beban motor dan beban statis (lumped load). [4]
2.3 KLASIFIKASI SISTEM ALIRAN DAYA [5]
Menurut Sigit (2015 : 40) dalam penelitiannya, klasifikasi sistem aliran daya dibagi dalam beberapa bagian, antara lain :
1. Representasi Transformator
Transformator berfungsi untuk menurunkan tegangan primer 20 kV (dari PLN) menjadi tegangan sekunder 380/220 V. Transformator merupakan komponen yang sangat penting dalam sistem tenaga listrik.
Penggunaan transformator dalam sistem tenaga listrik memungkinkan pemilihan tegangan yang sesuai dan ekonomis unntuk tiap-tiap keperluan misalnya kebutuhan akan tegangan tinggi dalam pengiriman daya listrik jarak jauh. Dalam bidang tenaga listrik pemakaian transformator dikelompokkan menjadi :
a. Transformator daya b. Transformator distribusi
c. Transformator pengukuran (transformator arus dan transformator tegangan)
Transformator direpresentasikan sebagai resistan R dan reaktansi bocor X, karena R dan X akan mempunyai nilai persatuan yang sama baik pada sisi tegangan rendah maupun sisi tegangan tinggi pada transformator.
2. Representasi Generator
Generator listrik adalah sebuah alat yang memproduksi energi listrik dari sumber energi mekanik, biasanya dengan menggunakan
induksi elektromagnetik. Proses ini dikenal sebagai pembangkit listrik.
Meskipun generator dan motor punya banyak kesamaan, tapi motor adalah alat yang mengubah energi listrik menjadienergi mekanik.
Generator mendorong muatan listrik untuk bergerak melalui sebuah sirkuit listrik eksternal, tapi generator tidak menciptakan listrik yang sudah ada di dalam kabel lilitannya. Hal ini bisa dianalogikan dengan sebuah pompa air, yang menciptakan aliran air tapi tidak menciptakan air di dalamnya. Sumber enegi mekanik bisa berupa resiprokat maupun turbin mesin uap, air yang jatuh melalui sebuah turbin maupun kincir air, mesin pembakaran dalam, turbin angin, engkol tangan, energi surya atau matahari, udara yang dimamfaatkan, atau apa pun sumber energi mekanik yang lain.
Generator dalam dunia industri biasanya digunakan sebagai sumber energi cadangan (pembangkit listrik pabrik) jika terjadi pemadaman dari PLN sehingga proses produksi tetap berjalan. Tidak hanya sebagai sumber energi cadangan, dalam industri yang berskala besar pembangkitan listrik melalui genertor menjadi pilihan sumber listrik utama dalam pabrik sehingga dapat menghemat biaya konsumsi listrik.
3. Representasi bus (busbar)
Busbar adalah suatu penghantar impedansi rendah dimana beberapa sirkuit listrik dapat dihubungkan secara terpisah dengan setiap keluaran tertuju ke dasar kerangka tiga busbar fasa dan satu netral.
Busbar pada dasarnya merupakan ril penghubung dua atau lebih rangkaian listrik. Busbar dapat disebut ril penghubung rangkaian. Semua generator atau sumber listrik dalam pusat tenaga listrik disalurkan melalui bus atau ke ril pusat listrik. Dalam sistem tenaga listrik terdapat jenis-jenis bus yaitu :
a. Bus beban
Setiap bus yang tidak memiliki generator disebut dengan loadbus.
Pada bus ini daya aktif dan daya reaktif diketahui sehingga sering disebut bus PQ. Daya aktif dan daya reaktif yang disuplay kedalam sistem tenaga listrik adalah mempunyai nilai positif, sementara daya aktif dan daya reaktif yang dikonsumsi bernilai negative.
b. Bus generator
Bus generator dapat disebut juga dengan voltage controlled bus karena tegangan pada bus selalu dibuat konstan. Setiap bus generator memiliki daya Mega Watt yang dapat diatur melalui prime mover (penggerakk mula dan besaran tegangan yang dapat diatur melalui arus eksitaasi generator sehingga bus ini sering juga disebut PV bus. Besaran yang dapat dihitung dari bus ini adalah P dan Q.
c. Bus berayun (swing bus atau slack bus)
Suatu sistem tenaga biasanya didesain untuk memiliki bus ini yang dijadikan sebagai referensi. Besaran yang dapat diketahui dari bus ini
adalah tegangan dan sudut beban. Sedangkan besaran yang dapat dihitung dari bus ini adalah daya aktif dan daya reaktif.
d. Bus tnggal (Single bus)
Bus tunggal adalah susunan bus yang paling sederhana dan paling murah. Keandalan serta fleksibilitas operasinya sangat terbatas. Apabila ada kerusakan pada bus ini maka seluruh pusatlistrik harus dipadamkan untuk dapat melakukan perbaikan. Olehsebab itu bus tunggal sebaiknya hanya digunakan pada pusat listrik yang tidak terlalu vital peranannya dalam sistem jaringan kelistrikan.
e. Bus ganda (multiple bus)
Multiple bus adalah suatu bus yang terdiri dari dua, tiga atau empat bus dalam saluran.
f. Bus gelang (ring bus)
Ring bus hanya memerlukan ruangan yang kecil dan baik untuk pemutusan sebagai bagian dari pelayanan dan pemeriksaan pemutus beban. Sistem ini jarang dipakai karena mempunyai kelemahan dari segi operasi yakni bus ini tidak begitu leluasa seperti sistem dua bus. Lagi pula rangkaian kontrol dan pengamannya menjadi lebih komplek dan kapasitas arus dari alat-alat yang terpasang seri harus lebih besar.
4. Representasi Kapasitor Bank
Kapasitor bank berfungsi sebagai salah satu alternatif dalam peralatan listrik terhadap kereksi faktor daya (power factor). Kapasitor akan memberikan daya reaktif lebih tinggi jika bekerja pada tegangan
yang lebih tinggi, meskipun bekerja pada tegangan yang lebih tinggi dari pada tegangan jaringan standar, kapasitor akan bekerja secara efektif dan tahan lama.
5. Representasi beban
Jenis beban terbagi menjadi dua jenis, yaitu : a. Static Load (Beban statis)
Beban statis dalam pemakaiannya selalu stabil dan tidak membutuhkan daya yang besar saat awalan atau mulai mengoperasikannya. Contoh dari beban statis adalah bebann penerangan atau lampu.
b. Dinamic Load (Beban dinamis)
Dinamic load adalah beban yang membutuhkan daya yangbesar dalam pengoperasiannya. Biasanya beban ini merupakan beban motor (induksi, sinkron, atau serempak). Motor induksi merupakan motor arus bolak balik (AC) yang paling banyak digunakan.
6. Representasi Sistem Proteksi
Representasi sistem proteksi adalah sebagai pengaman baik untuk mengamankan peralatan listrik maupun pengguna peralatan listrik (manusia). Sistem pengaman diharapkan dapat mencegah masalah- masalah yang disebabkan akibat hubung singkat (short circuit) dan kelebihan beban (over load) dalam aliran daya listrik.
2.4 KONSEP DASAR ALIRAN DAYA [6]
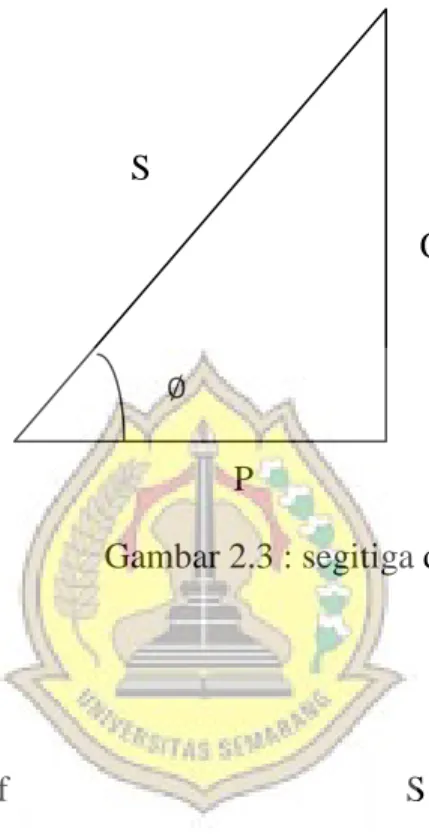
Dalam persamaan maupun perhitungan daya, hal pokok yang harus dipahami adalah dengan memahami konsep segitiga daya. (Stevenson, 1990) Ilustrasi konsep segitiga daya ditunjukkan pada gambar 2.3
S
Q
P
Gambar 2.3 : segitiga daya
Keterangan : P : Daya aktif Q : Daya reaktif
S : Daya semu Cos ∅ : Faktor daya
Dalam sistem tenaga listrik dikenal tiga jenis daya, yaitu daya aktif atau real power (P), daya reaktif atau reactive power (Q), dan daya nyata atau apparent power (S).
[5](Sigit A P, Analisis Aliran Daya (Load Flow) dalam Sistem Tenaga Listrik : 2015 : Hal 40-45) [6](Stevenson, Jr. W.D, Analisis Sistem Tenaga Listrik :1990)
∅
Daya aktif (P) adalah daya listrik yang dibangkitkan disisi keluaran generator, kemudian termanfaatkan oleh konsumen, dapat dikonversi ke bentuk energi lainnya seperti energi gerak pada motor, energy juga menjadi energi panas pada heater; ataupun dapat diubah kebentuk energi listrik lainnya. Perlu diingat bahwa daya ini memiliki satuan watt (W), kilowatt (kW) atau tenaga kuda (HP).
Sedangkan daya reaktif (Q) adalah suatu besaran yang digunakan untuk menggambarkan adanya fluktuasi daya pada saluran transmisi dan distribusi akibat dibangkitkannya medan/daya magnetik atau beban yang bersifat induktif (seperti : motor listrik, trafo, dan las listrik). Walaupun namanya adalah daya, namun daya reaktif ini tidak nyata dan tidak bisa dimanfaatkan. Daya ini memiliki satuan volt-ampere-reaktif (VAR) atau kilovar (kVAR).
Daya semu (S) merupakan jumlah daya total yang terdiri dari daya aktif (P) dan daya reaktif (Q).
Konsep dasar aliran daya listrik sangat penting untuk membantu perhitungan dalam analisis aliran daya listrik. Dalam suatu analisis sistem tenaga listrik khususnya pada analisis aliran daya selalu mengacu pada konsep-konsep dasar aliran daya sebagai berikut :
1. Daya listrik pada rangkaian satu fasa [6]
Daya yang diserap oleh suatu beban pada setiap saat sama dengan jatuh tegangan (voltage drop) pada beban tersebut dalam volt dikalikan dengan arus yang mengalir lewat beban dalam ampere, jika terminal
terminal beban digambarkan sebagai a dan n serta jika tegangan dan arusdinyatakan dengan (Stevenson, 1990 : 14 )
Van = Vmax cos ωt dan Ian = Imaxcos (ωt –𝜃) (2.1) 𝜃= positif (+), untuk arus lagging
𝜃 = 18egative (-), untuk arus leading Maka daya sesaat (S) :
S = Vmax Imax cos ωt cos (ωt – 𝜃) (2.2) S = V x I
= 𝑉𝑚𝑎𝑥𝐼𝑚𝑎𝑥2 𝑐𝑜𝑠𝜃(1 + cos ωt)+𝑉𝑚𝑎𝑥𝐼𝑚𝑎𝑥2 sin𝜃 sin 2ωt (2.3) Atau,
S= V 𝐼 cos θ(1+ cos 2ωt) + V 𝐼 sin θ sin 2ωt (2.4) Keterangan :
|V|dan |I|adalah harga efektif dari tegangan dan arus
|V||I|cosθ(1+ sin 2ωt) selalu positif, dengan harga rata-rata :
P= |V||I|cos θ (2.5)
|V||I|sin θ sin 2ωt mempunyai harga positif dan negative dengan harga rata-rata nol
Q = |V||I|sin θ (2.6)
[6](Stevenson, Jr. W.D, Analisis Sistem Tenaga Listrik :1990 :Hal 14)
Keterangan :
P = disebut daya nyata atau aktif (watt) cos∅ = faktor kerja
Q = disebut daya reaktif
“positif” untuk beban induktif “negative” untuk beban kapasitif
2. Daya Listrik Pada Rangkaiam 3 Fasa [7]
Daya yang diberikan oleh generator tiga fasa ataua yang diserap oleh beban tiga fasa adalah jumlah daya dari tiap-tiap fasa. Pada sistem tiga fasa seimbang berlaku rumus-rumus:
P = 3VpIpcos θp (2.7)
Q = 3VpIpsinθp (2.8)
Keterangan :
Θp = sudut antara arus fasa (lagging) dan tegangan fasa
Hubungan yang terjadi pada rangkaian sistem tiga fasa umumnya ada dua hubungan yaitu hubungan bintang (Y) dan segitiga (Δ).
Hubungan bintang (Y) : Vp = 𝑉1
3; Ip = I1 (2.9)
[7](Stevenson, Jr. W.D, Analisis Sistem Tenaga Listrik :1990 :Hal 15)
Hubungan segitiga (Δ) : Vp= V1; Ip = 𝐼1
3 (2.10)
Kemudian dimasukkan ke persamaan di atas menjadi :
P = 3V1 I1 cos θp (2.11)
Q = 3V1 I1 sin θp (2.12)
Sehingga :
S = 𝑃2+ 𝑄2 = 3V1 I1 (2.13)
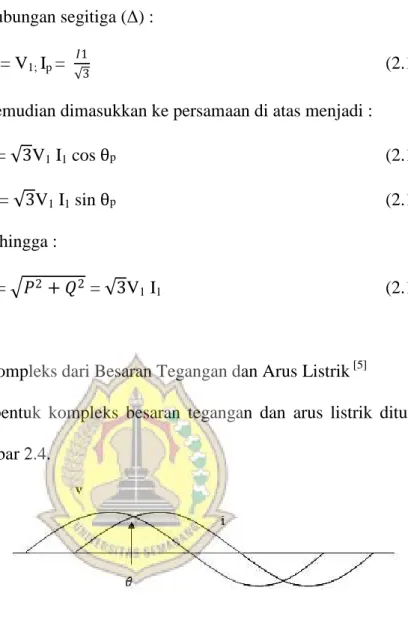
3. Bentuk Kompleks dari Besaran Tegangan dan Arus Listrik [5]
Ilustrasi bentuk kompleks besaran tegangan dan arus listrik ditunjukkan pada gambar 2.4.
Gambar 2.4 Bentuk kompleks dari Besaran Tegangan dan Arus Listrik
V dan I mempunyai bentuk gelombang yang sama (sinus) dengan frekuensi yang sama pula. Tetapi yang membedakan hanya magnitude (harge efektif) dan satu fasanya. Dalam bentuk kompleks besaran dari arus dan tegangan adalah :
v = |V|∠θ0 (digunakan sebagai referensi) (2.14)
[5](Sigit A P, Analisis Aliran Daya (Load Flow) dalam Sistem Tenaga Listrik : 2015 : Hal16)
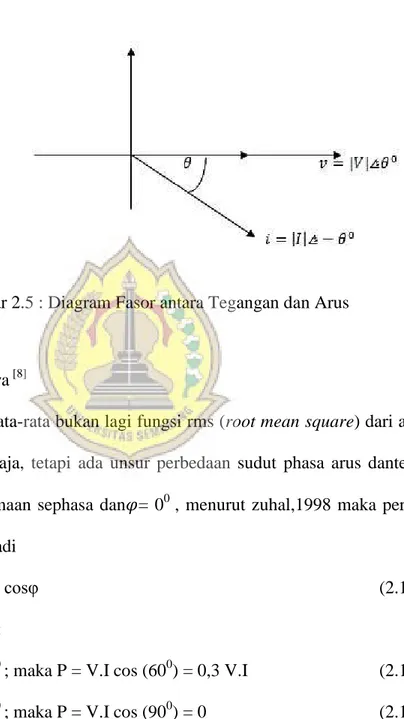
I = |I|∠- θ0 (Lagging) (2.15) Diagram fasor antara tegangan dan arus ditunjukkan pada gambar 2.5
Gambar 2.5 : Diagram Fasor antara Tegangan dan Arus
4. Faktor Daya [8]
Daya rata-rata bukan lagi fungsi rms (root mean square) dari arus dan tegangan saja, tetapi ada unsur perbedaan sudut phasa arus dantegangan dari persamaan sephasa dan𝜑= 00 , menurut zuhal,1998 maka persamaan daya menjadi
P = V.I cosφ (2.16)
Untuk :
φ = 600; maka P = V.I cos (600) = 0,3 V.I (2.17) φ = 900; maka P = V.I cos (900) = 0 (2.18)
Arus yang mengalir pada sebuah tahanan akan menimbulkan tegangan pada tahanan tersebut, yaitu sebesar :
P = Vr . Im cos φ (2.19)
Keterangan :
P : daya aktif (Watt) Vr : tegangan (Volt)
Im : arus maksimal (Ampere) cos φ : faktor daya
Tidak ada sudut fasa antara arus dengan tegangan pada tahanan, maka sudut φ = 00. Sehingga :
P = V . I (2.20)
Tegangan dikalikan dengan arus disebut daya semu.Daya ratarata dibagi daya semu disebut dengan faktor daya. Untuk arus dan tegangan sinusoid, faktor daya dapat dihitung (Dhimas, 2014 : 18) :
Faktor daya = 𝑉.𝐼𝑃 = 𝑉.𝐼.cos ∅𝑉.𝐼 = cos∅ (2.21)
∅adalah sudut factor daya, sudut ini menentukan kondisi terdahulu atau tertinggal tegangan terhadap arus. Bila sebuah beban diberikan tegangan, impedansi dari beban tersebut maka dapat menentukan besar arus dan sudut phasa yang mengalir pada beban tersebut.Faktor daya merupakan petunjuk yang menyatakan sifat suatu beban.
Perbandingan antara daya aktif (P) dan daya nyata (S) inilah yang dikenal dengan istilah faktor daya atau power factor (PF). Apabila dilihat
pada segitiga daya, perbandingan daya aktif (P) dan daya nyata (S) merupakan nilai cos φ.
Oleh karena hal ini, istilah faktor daya juga sering dikenal dengan sebutan nilai cos φ.
5. Losses (Rugi daya) [9]
Konduktor pada bagian penyaluran energi listrik mempunyairesistansi terhadap arus listrik, jadi ketika sistem beroperasi pada bagian penyaluran ini akan terjadi rugi daya yang berubah menjadi energi panas. Rugi daya pada gardu induk relatif kecil, sehingga rugi daya dalam sistem tenaga listrik dapat dianggap terdiri dari rugi daya pada jaringan transmisi dan jaringan distribusi. Jika energi listrik disalurkan melalui jaringan arus bolak-balik tiga fasa, maka rugi daya pada jaringan tersebut adalah :
Plosses = 3. I2. R. L (2.22)
Keterangan :
I : Arus yang mengalir (A)
R : resistansi konduktor (ohm/km) L : panjang saluran (km)
2.5 Persamaan Aliran Daya [5]
Aliran daya listrik akan selalu mengalir ke beban, sehingga aliran daya disebut juga aliran beban. Beban-beban tersebut direpresentasikan sebagai impedansi tetap (Z), daya yang tetap (P), tegangan (V), dan arus yang tetap (I).Pada dasarnya beban dapat digolongkan menjadi dua macam, yaitu beban statis (static load) dan beban dinamis (dinamic load).
Besarnya aliran daya yang diserap oleh saluran transmisi beserta rugiruginnya dapat diketahui dengan menghitung lebih dahulu besaran (magnitude) tegangan dan sudut fasornya pada setiap simpul saluran. Menurut Sigit (2015 : 25) dalam penelitiannya, pada setiap simpul saluran terdapat empat parameter, yaitu :
1. Daya nyata (P) dengan satuan megawatt (MW)
2. Daya reaktif (Q) dengan satuan megavolt ampere reaktif (MVAR) 3. Besaran tegangan (V) dengan satuan kilovolt (KV)
4. Sudut fasa tegangan (∅) dengan satuan radian
Bila simpul sendiri mempunyai beban, daya pada simpul adalah selisih daya yang dibangkitkan dengan bebannya, tetapi bila simpulnya tidak mempunyai generator, beban pada saluran tersebut dianggap sebagai generator yang membangkitkan daya negatif ke simpul tersebut.
Keempat parameter, untuk mendapatkan penyelesaian aliran daya pada setiap simpul perlu diketahui dua buah parameternya, tergantung pada parameter-parameter yang diketahui maka setiap simpul pada sistem diklasifikasikan dalam tiga kategori : [5]
1. Simpul beban (Bus PQ)
Parameter yang diketahui adalah P dan Q, parameter yang tidak diketahui adalah V dan φ.
2. Simpul kontrol (Bus generator)
Parameter-parameter yang diketahui adala P dan V, dimana padasimpul ini mempunyai kendala untuk daya semu (Q) yang melalui smpul, bila kendala ini dalam perhitungan integrasinya tidak dapat dipenuhi maka simpul ini akan berganti menjadi simpul beban.
Sebaliknya bila daya memenuhi kendala maka akan dihitung sebagai simpul kontrol kembali. Parameter-parameter yang tidak diketahui adalah φ dan Q.
3. Simpul ayun (Swing bus atau slack bus)
Parameter-parameter yang diketahui adalah V dan φ (biasanya φ= 0). Simpul ayun selalu mempunyai generator, dalam perhitungan aliran daya, P dan Q pada simpul ini tidak perlu dihitung. Simpul ini menentukan dalam perhitungan aliran daya untuk memenuhi kekurangan daya (rugi-rugi dan beban) seluruhnya karena kerugian pada jaringan tidak dapat diketahui sebelun perhitungan selesai dilakukan.
Besaran daya pada setiap bus dapat dinyatakan dengan persamaan :
Si = SGi – STi – SLi (2.23)
Keterangan :
SGi : daya yang masuk ke bus i (MVA)
STi : daya yang keluar dari bus i (MVA) SLi : beban daya yang keluar dari bus i (MVA) Dalam bentuk kompleks :
Pi + Qi = (PGi + jQGi) – (PTi + jQTi) – (PLi + jQLi)
= (PGi – PTi – PLi) + j(QGi – QTi – QLi) (2.24) Daya yang mengalir dari setiap bus juga dapat dinyatakan oleh persamaan :
STi = Vi . Ii (2.25)
Persamaan aliran daya secara sederhana dapat dilihat pada Gambar 2.6 dibawah, untuk sistem yang memiliki 2 rel. Pada setiap rel memiliki sebuah generator dan beban, walaupun pada kenyatannya tidak semua rel memiliki generator. Penghantar menghubungkan antara rel 1 dengan rel 2. Pada setiap rel memiliki 6 besaran elektris yang terdiri dari : PD, PG, QD, QG, V, dan δ.[10] Diagram satu garis sistem 2 rel ditunjukkan pada gambar 2.6
SG1= PG1+ JQG1 SG2= PG2+ JQG2
rel 1 penghantar rel 2 V1∠ 𝛿1 V2∠ 𝛿2
beban 1 beban 2
SD1= PD1+ JQD1 SD2= PD2+ JQD2
Gambar 2.6 Diagram satu garis sistem 2 rel
G1 G2
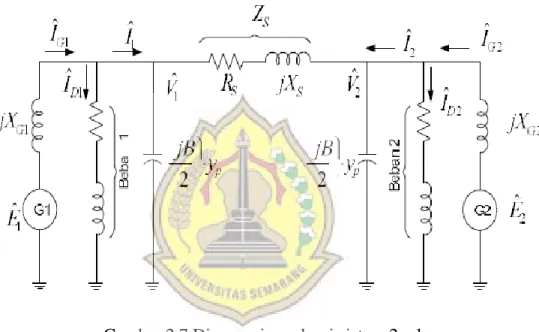
Pada Gambar 2.6 dapat dihasilkan persamaan aliran daya dengan menggunakan diagram impedansi. Pada Gambar 2.7 merupakan diagram impedansi dimana generator sinkron direpresentasikan sebagai sumber yang memiliki reaktansi dan transmisi model π (phi). Beban diasumsikan memiliki impedansi konstan dan daya konstan pada diagram impedansi. Diagram impedansi sistem 2 rel ditunjukkan pada gambar 2.7
Gambar 2.7 Diagram impedansi sistem 2 rel Besar daya pada rel 1 dan rel 2 adalah
S1 = SG1-SD1 = (PG1-PD1) + j(QG1-QD1) (2.26) S2 = SG2-SD2 = (PG2-PD2) + j(QG2-QD2) (2.27)
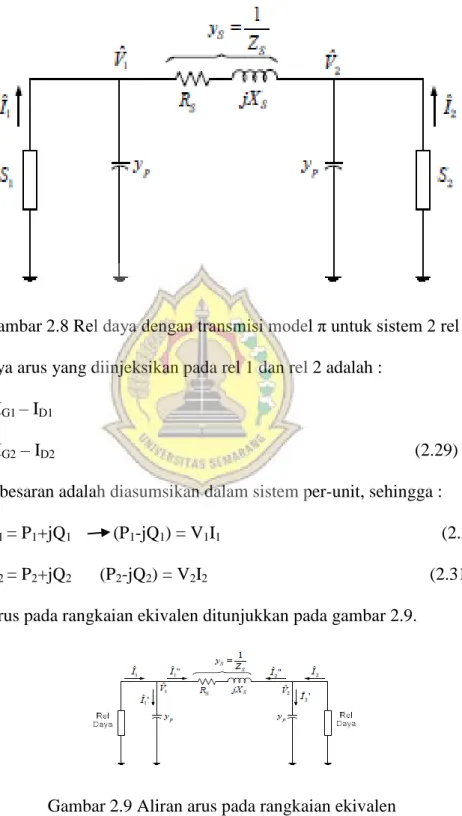
Pada Gambar 2.8 merupakan penyederhanaan dari Gambar 2.7 menjadi daya rel (rel daya) untuk masing-masing rel.
[5](Sigit A P, Analisis Aliran Daya (Load Flow) dalam Sistem Tenaga Listrik : 2015 : Hal 25-26)
[8](Zuhal, Dasar Teknik Tenaga Listrik dan Elektronika Daya : 1998: Hal31)[9](Bonggas L Tobing, Peralatan Tegangan Tinggi : 2003: Hal 2)
Penyederhanaan diagram impedansi sistem 2 rel ditunjukkan pada gambar 2.8
Gambar 2.8 Rel daya dengan transmisi model π untuk sistem 2 rel Besarnya arus yang diinjeksikan pada rel 1 dan rel 2 adalah :
I1 = IG1 – ID1 (2.28) I2 = IG2 – ID2 (2.29)
Semua besaran adalah diasumsikan dalam sistem per-unit, sehingga : S1 = V1I1 = P1+jQ1 (P1-jQ1) = V1I1 (2.30) S2 = V2I2 = P2+jQ2 (P2-jQ2) = V2I2 (2.31) Aliran arus pada rangkaian ekivalen ditunjukkan pada gambar 2.9.
Gambar 2.9 Aliran arus pada rangkaian ekivalen
Aliran arus dapat dilihat pada Gambar 2.9, dimana arus pada rel 1 adalah : I1 = I1’
+ I1”
I1 = V1 + yp + (V1-V2) ys
I1 = (yp+ ys)V1 + (-ys)V2 (2.32)
I1 = Y11V1 + Y12V2 (2.33) Dimana :
Y11 adalah jumlah admitansi terhubung pada rel 1 = yp + ys
Y12 adalah admitansi negative antara rel 1 dan rel 2= -ys Untuk aliran arus pada rel 2 adalah :
I2 = I2’ + I2”
I2 = V2 + yp + (V2-V1) ys
I2 = (-ys)V1 + (yp+ys)V2 (2.34) I1 = Y21V1 + Y22V2 (2.35)
Dimana :
Y22 adalah jumlah admitansi terhubung pada rel 2 = yp + ys Y21 adalah admitansi negative antara rel 2 dengan rel 1 = -ys =Y12
Dari Persamaan (2.33) dan (2.35) dapat dihasilkan Persamaan dalam bentuk matrik, yaitu :
I1I2 = 𝑌11 𝑌12 𝑌21 𝑌22 V1
V2 (2.36)
Notasi matriks dari persamaan 2.36 adalah
Ibus = Ybus Vbus (2.37) Persamaan 2.30 hingga 2.37 yang diberikan sistem 2 rel dapat dijadikan sebagai dasar untuk penyelesaian persamaan aliran daya sistem n-rel.
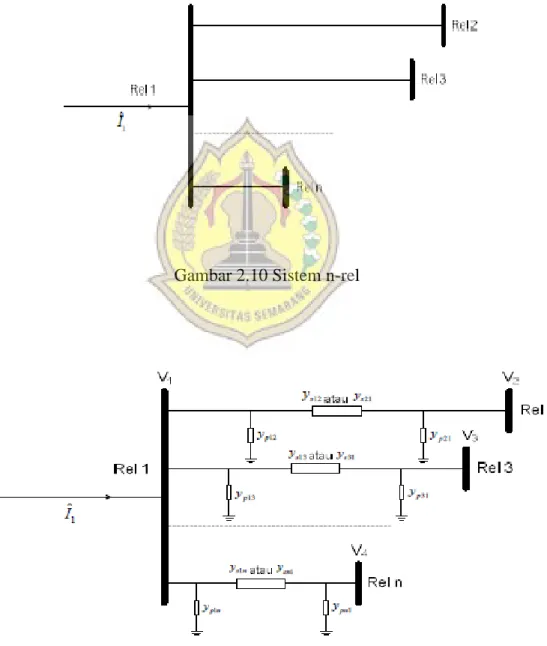
Gambar 2.10 menunjukan sistem dengan jumlah n-rel dimana rel 1 terhubung dengan rel lainya. Gambar 2.11 menunjukan model transmisi untuk sistem n-rel.
Gambar 2.10 Sistem n-rel
Gambar 2.11 Model transmisi π untuk sistem n-rel
Persamaan yang dihasilkan dari gambar 2.9.2 adalah
I1 = V1yp12 + V1yp13 +…..+ V1yp1n + (V1-V2) ys12 + (V1-V3) ys13+….+(V1-Vn)
I1 = (yp12 + yp13 +….+yp1n+ys12+ys13+….+ys1n)Vn-ys12V2-ys13V3+…-ys1nVn (2.38) I1 = Y11V1+Y12V2+Y13V3+….+Y1nVn (2.39) Dimana :
Y11 = Yp12 + Yp13 +….+ Yp1n+Ys12+Ys13+….+Ys1n (2.40) = jumlah semua admitansi yang dihubungkan dengan rel 1
Y12 = -ys12; Y13= -ys13 ; Y1n = -yS1n (2.41) Persamaan 2.42 dapat disubtitusikan ke persamaan 2.30 menjadi persamaan 2.43, yaitu :
(2.42)
(2.43)
(2.44) Persamaan (2.44) merupakan representasi persamaan aliran daya yang nonlinear. Untuk sistem n-rel, seperti persamaan (2.36) dapat dihasilkan persamaan (2.24), yaitu :
(2.45) Notasi matrik dari Persamaan (2.45) adalah :
Ibus = Ybus Vbus (2.46)
Dimana :
(2.47)
2.6 Metode Perhitungan Aliran Daya [10]
Pada sistem multi-rel, penyelesaian aliran daya dengan metode Persamaan aliran daya. Metode yang digunakan pada umumnya dalam penyelesaian aliran daya, yaitu metode :Newton-Raphson, Gauss-Seidel, dan Fast Decoupled. Tetapi metode yang dibahas pada Tugas Akhir ini adalah metode Newton-Raphson
Dalam metode Newton-Raphson secara luas digunakan untuk permasalahan Persamaan non-linear.Penyelesaian Persamaan ini menggunakan permasalahan yang linear dengan solusi pendekatan.Metode ini dapat
diaplikasikan untuk satu Persamaan atau beberapa Persamaan dengan beberapa variabel yang tidak diketahui.
Untuk Persamaan non-linear yang diasumsikan memiliki sebuah variable seperti persamaan :
y =f (x) (2.26)
Persamaan (2.26) dapat diselesaikan dengan membuat Persamaan menjadi persamaan (2.27).
f(x)=0 (2.27)
Menggunakan deret taylor Persamaan (2.27) dapat dijabarkan menjadi persamaan (2.28).
f(x) = f (x0) +1!1 𝑑𝑓 x𝑑𝑥0 (𝑥 − 𝑥0)+1𝑑𝑓2! 𝑑𝑥2 𝑥20 (𝑥 − 𝑥0)2+ ⋯ +𝑛!1 𝑑𝑓
𝑛 𝑥0
𝑑𝑥𝑛 (𝑥 − 𝑥0)2 = 0 (2.28) Turunan pertama dari Persamaan (2.28) diabaikan, pendekatan linear
menghasilkan Persamaan (2.29)
f(x) = f (x0)+𝑑𝑓 (𝑥𝑑𝑥0)(x-𝑥0)= 0 (2.29) Dari :
𝑥1= 𝑥0 – 𝑑𝑓 (𝑥𝑓(𝑥0
0)/𝑑𝑥 (2.30)
Bagaimana pun, untuk mengatasi kesalahan notasi, maka Persamaan (2.30) dapat diulang seperti Persamaan (2.31).
𝑥(1)= 𝑥(0)- 𝑓(𝑥 0 )
𝑑𝑓 (𝑥 0 )/𝑑𝑥 (2.31)
Dimana :𝑥(0)= pendekatan perkiraan 𝑥(1)= pendekatan pertama
Oleh karena itu, rumus dapat dikembangkan sampai iterasi terakhir (k+1), menjadi Persamaan (2.32).
𝑥(𝑘+1) = 𝑥(𝑘) – 𝑓(𝑥 𝑘 )
𝑑𝑓 (𝑥 𝑘 )/𝑑𝑥 (2.32) 𝑥(𝑘+1) = 𝑥(𝑘)- 𝑓𝑓(𝑥′(𝑥 𝑘 𝑘 )) (2.33)
Jadi,
∆𝑥 = −𝑓𝑓(𝑥′(𝑥 𝑘 𝑘 )) (2.34)
∆𝑥 = 𝑥(𝑘+1)- 𝑥(𝑘) (2.35)
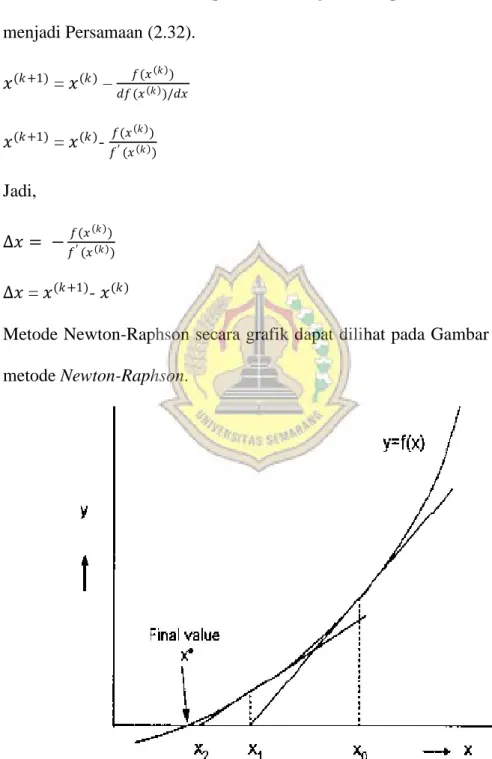
Metode Newton-Raphson secara grafik dapat dilihat pada Gambar 2.12 ilustrasi metode Newton-Raphson.
Gambar 2.12 : ilustrasi metode Newton Raphson
Pada Gambar 2.9.3 dapat dilihat kurva garis melengkung diasumsikan grafik Persamaan y =f(x) .Nilai 𝑥0pada garis x merupakan nilai perkiraan awal kemudian dilakukan dengan nilai perkiraan kedua hingga perkiraan ketiga.
Metode Newton Raphson dengan koordinat polar, besaran-besaran listrik yang digunakan untuk koordinat polar, pada umumnya seperti Persamaan (2.36)
V1= 𝑉𝑖 ∠𝛿𝑖 ; Vj = 𝑉𝑗 ∠𝛿𝑗 ; dan Yij = 𝑌𝑖𝑗 𝜃𝑖𝑗 (2.36) Persamaan arus (2.42) pada Persamaan sebelumnya dapat diubah kedalam Persamaan polar (2.37).
(2.37) Persamaan (2.37) dapat disubtitusikan kedalam persamaan daya (2.43) pada persamaan sebelumnya menjadi Persamaan (2.38).
P1-jQ1 = V1*
I1
Vi*= 𝑉𝑖 ∠- 𝛿I Vi*
= conjugate dari Vi
(2.38)
Dimana :
𝑒𝑗 (𝜃𝑖𝑗 −𝛿𝑖 + 𝛿𝑗 ) ≅ cos (𝜃ij – 𝛿I +𝛿j) + j sin (𝜃ij – 𝛿I +𝛿j) (2.39) Persamaan (2.38) dan (2.39) dapat diketahui Persamaan daya aktif (2.40) dan Persamaan daya reaktif (2.41).
(2.40)
(2.41) Persamaan (2.40) dan (2.41) merupakan langkah awal perhitungan aliran daya menggunakan metode Newton-Raphson. Penyelesaian aliran daya menggunakan proses iterasi (k+1). Untuk iterasi pertama (1) nilai k= 0, merupakan nilai perkiraan awal (initial estimate) yang ditetapkan sebelum dimulai perhitungan aliran daya.
Hasil perhitungan aliran daya menggunakan persamaan (2.40) dan (2.41) dengan nilai P1(k) dan Q1(k) . Hasil ini digunakan untuk menghitung nilai ∆P1(k) dan ∆Q1(k).
Menghitung nilai ∆P1(k) dan ∆Q1(k)
menggunakan persamaan (2.42) dan (2.43)
∆P1(k) = P1,spec – 𝑃𝑖,𝑐𝑎𝑙𝑐(𝑘) (2.42)
∆Q1(k)
= Q1,spec - 𝑄𝑖,𝑐𝑎𝑙𝑐(𝑘) (2.43)
Hasil perhitungan ∆P1(k)
dan ∆Q1(k)
digunakan untuk matriks jacobian untuk persamaan (2.44)
(2.44) Persamaan (2.44) dapat dilihat bahwa perubahan daya berhubungan dengan perubahan besar tegangan dan sudut phasa.
Secara umum Persamaan (2.44) dapat disederhanakan menjadi Persamaan (2.45).
∆P∆Q(𝑘)(k) = 𝑗1 𝑗2
𝑗3 𝑗4 ∆𝛿(𝑘)
∆ 𝑉 (𝑘) (2.45) Besaran elemen matriks jacobian persamaan (2.45) adalah :
J1
(2.46)
(2.47)
J2
(2.48)
(2.49)
J3
(2.50)
(2.51)
J4
(2.52)
(2.53) Setelah nilai matriks jacobian dimasukkan kedalam persamaan (2.45) maka nilai ∆𝛿1(k)
dan ∆ 𝑉 1(𝑘) dapat dicari dengan menginverskan matrik jacobian seperti persamaan (2.54)
∆𝛿(𝑘)
∆ 𝑉 (𝑘) = 𝑗1 𝑗2 𝑗3 𝑗4
−1
∆P(𝑘)
∆Q(k) (2.54)
Setelah nilai ∆𝛿1(k) dan ∆ 𝑉 1(𝑘) diketahui nilainya maka nilai ∆𝛿1(𝑘+1) dan ∆ 𝑉 1(𝑘+1) dapat dicari dengan menggunakan nilai ∆𝛿1(k)
dan ∆ 𝑉 1(𝑘) kedalam persamaan (2.55) dan (2.56)
𝛿1(k+1) = 𝛿1(k) + ∆𝛿1(k)
(2.55)
𝑉1(𝑘+1) = 𝑉1(𝑘) + ∆ 𝑉1(𝑘) (2.56)
Nilai 𝛿1(k+1) dan 𝑉 1(𝑘+1) hasil perhitungan dari persamaan (2.55) dan (2.56) merupakan perhitungan pada iterasi pertama. Nilai ini digunakan kembali untuk perhitungan iterasi kedua dengan cara memasukkan nilai ini kedalam persamaan (2.40) dan (2.41) sebagai langkah awal perhitungan aliran daya
Perhitungan aliran daya pada iterasi kedua mempunyai nilai k = 1.
Iterasi perhitungan aliran daya dapat dilakukan sampai iterasi ke-n.
Perhitungan aliran daya menggunakan metode Newton-Raphson : 1. Membentuk matrik admitansi Yrel sistem
2. Menentukan nilai awal V(0) , 𝛿(0), Pspec, Qspec
3. Menghitung daya aktif dan daya reaktif berdasarkan Persamaan (2.40) dan (2.41)
4. Menghitung nilai ∆𝑃1(k)
dan ∆𝑄1(𝑘) berdasarkan persamaan (2.42) dan (2.43)
5. Membuat matrik jacobian berdasarkan persamaan (2.45) sampai (2.53)
6. Menghitung nilai 𝛿(k+1) dan 𝑉(𝑘+1) berdasarkan persamaan (2.55) dan (2.56)
7. Hasil nilai 𝛿(k+1) dan 𝑉(𝑘+1) dimasukkan kedalam persamaan (2.40) dan (2.41) untuk mencari nilai ∆𝑃 dan ∆𝑄.
8. Jika sudah konvergensi maka perhitungan selesai, jika belum konvergensi maka perhitungan dilanjutkan untuk iterasi berikutnya.
Pada sistem yang terdiri n bus, persamaan untuk penyelesaian aliran daya sebanyak (n-1), yang dalam matriks dapat dinyatakan dalam bentuk (Stevenson, 1990:187) : [7]
Persamaan di atas dapat disederhanakan menjadi :
∆𝑄∆𝑃 = J1 J2 J3 J4 ∆∅
∆𝑉
Atau
∆∅
∆𝑉 = J1 J2 J3 J4
−1 ∆𝑃
∆𝑄
Keterangan :
ΔP dan ΔQ : Selisih daya aktif dan daya reaktif antara nilai yang diketahui dan nilai yang dihitung.
ΔV dan ΔΦ : Selisih tegangan bus dan sudut fasa
J1, J2, J3, dan J4 disebut sub matriks Jacobian dari matriks Jacobian J.
Sub matrik jacobian disebut sebagai matrik jacobian yang mempunyai elemen sebagi berikut : [3]
Sub matrik J1 :
Elemen bukan diagonalnya adalah :
𝜕𝑃1
𝜕∅2, 𝜕𝑃1𝜕∅3, 𝜕𝑃1𝜕∅4, ……𝜕∅𝑛−1𝜕𝑃1 , atau 𝜕𝑃1𝜕∅𝑞…(p≠q) Elemen diagonalnya adalah :
∂P1
∂∅1, ∂P2∂∅2, ∂P3∂∅3,……. ∂Pn −1∂∅n−1, atau ∂Pp∂∅p Sub matrik J2 :
Elemen bukan diagonalnya adalah :
∂P1
∂𝑉2, ∂P1∂𝑉3, ∂P1∂𝑉4, …….𝜕𝑉𝑛 −1𝜕𝑃1 , atau ∂Pp∂𝑉p…(p≠q) Elemen diagonalnya adalah :
∂P1
∂𝑉1, ∂P2∂𝑉2, ∂P3∂𝑉3,…….. ∂Pn −1∂𝑉n−1, atau ∂Pp∂𝑉q Sub matrik J3 :
Elemen bukan diagonalnya adalah :
∂Q1
∂∅2, ∂Q1∂∅3, ∂Q1∂∅4,……. ∂∅n−1∂Q1 , atau ∂Qp∂∅q…(p≠q) Elemen diagonalnya adalah :
∂Q1
∂∅1, ∂Q2
∂∅2, ∂Q3
∂∅3,……. ∂Qn −1∂∅n−1, atau ∂Qp
∂∅p
Sub matrik J4 :
Elemen bukan diagonalnya adalah :
∂Q1
∂𝑉2, ∂Q1∂𝑉3, ∂Q1∂𝑉4,…….. 𝜕𝑉𝑛 −1𝜕𝑄1 , atau ∂Qp∂𝑉q….(p≠q) Elemen diagonalnya adalah :
∂Q1
∂𝑉1, ∂Q2∂𝑉2, ∂Q3∂𝑉3, ……..∂Qn −1∂𝑉n−1, atau ∂Qp∂𝑉p
Metode Newton Raphson secara pendekatan, bila perubahan kecil pada suatu tegangan dianggap tidak banyak berpengaruh terhadap perubahan daya aktif, demikian pula perubahan kecil pada sudut fasa juga dianggap tidak banyak berpengaruh terhadap perubahan daya reaktif, maka perubahan koordinat kutub untuk menyelesaikan aliran beban dapat dianggap elemen matrik jacobian.
J2 dan J3 adalah sama dengan nol, oleh karena itu persamaan menjadi
∆𝑄∆𝑃 = J1 0 0 J4 ∆∅
∆𝑉
Hanya melakukan proses iterasi sebanyak 1 kali, sudah diperoleh suatu harga yang konvergen. Penyelesaian aliran daya dengan menggunakan koordinat kartesian juga dapat diperoleh dengan cara mengabaikan harga elemen- elemen bukan diagonal dari sub matrik J1, J2, J3 dan J4 dari matrik jacobiannya.
2.7 ETAP Power Station 12.6 [1]
ETAP (Electric Transient and Analysis Program) merupakan suatu perangkat lunak yang mendukung sistem tenaga listrik.Perangkat ini mampu bekerja dalam keadaan offline untuk simulasi tenaga listrik, online untuk pengelolaan data real-time atau digunakan untuk mengendalikan sistem secara real-time. Fitur yang terdapat di dalamnya pun bermacam-macam antara lain fitur yang digunakan untuk menganalisa pembangkitan tenaga listrik, sistem transmisi maupun sistem distribusi tenaga listrik.ETAP ini awalnya dibuat dan dikembangkan untuk meningkatkan kualitas kearnanan fasiitas nuklir di Arnerika Serikat yang selanjutnya dikembangkan menjadi sistem monitor manajemen energi secara real time, simulasi, kontrol, dan optimasi sistem tenaga listrik, (Awaluddin, 2007). ETAP dapat digunakan untuk membuat proyek sistem tenaga listrik dalam bentuk diagram satu garis (one line diagram) dan jalur sistem pentanahan untuk berbagai bentuk analisis, antara lain: aliran daya, hubung singkat, starting motor, trancient stability, koordinasi relay proteksi dan sistem harmonisasi. Proyek sistem tenaga listrik memiliki masing-masing elemen rangkaian yang dapat diedit langsung dari diagram satu garis dan atau jalur sistem pentanahan. Untuk kemudahan hasil perhitungan analisis dapat ditampilkan pada diagram satu garis.
Etap Power Station memungkinkan anda untuk bekerja secara langsung dengan tampilan gambar single line diagram/diagram satu garis . Program ini dirancang sesuai dengan tiga konsep utama:
1. Virtual Reality Operasi
Sistem operational yang ada pada program sangat mirip dengan sistem operasi pada kondisi real nya. Misalnya, ketika Anda membuka atau menutup sebuah sirkuit breaker, menempatkan suatu elemen pada sistem, mengubah status operasi suatu motor, dan utnuk kondisi de-energized pada suatu elemen dan sub-elemen sistem ditunjukkan pada gambar single line diagram dengan warna abu-abu.
2. Total Integration Data
Etap Power Station menggabungkan informasi sistem elektrikal, sistem logika, sistem mekanik, dan data fisik dari suatu elemen yang dimasukkan dalam sistem database yang sama. Misalnya, untuk elemen subuah kabel, tidak hanya berisikan data kelistrikan dan tentang dimensi fisik nya, tapi juga memberikan informasi melalui raceways yang di lewati oleh kabel tersebut. Dengan demikian, data untuk satu kabel dapat digunakan untuk dalam menganalisa aliran beban (load flow analysis) dan analisa hubung singkat (short circuit analysis) yang membutuhkan parameter listrik dan parameter koneksi serta perhitungan ampacity derating suatu kabel -yang memerlukan data fisik routing.
3. Simplicity in Data Entry
Etap Power Station memiliki data yang detail untuk setiap elemen yang digunakan. Dengan menggunakan editor data, dapat mempercepat proses
entri data suatu elemen. Data-data yang ada pada program ini telah di masukkan sesuai dengan data-data yang ada di lapangan untuk berbagai jenis analisa atau desain
ETAP PowerStation dapat melakukan penggambaran single line diagram secara grafis dan mengadakan beberapa analisa/studi yakni Load Flow (aliran daya), Short Circuit (hubung singkat), motor starting, harmonisa, transient stability, protective device coordination, dan cable derating.
ETAP PowerStation juga menyediakan fasilitas Library yang akan mempermudah desain suatu sistem kelistrikan. Library ini dapat diedit atau dapat ditambahkan dengan informasi peralatan bila perlu.
Beberapa hal yang perlu diperhatikan dalam bekerja dengan ETAP PowerStation adalah :
1. One Line Diagram, menunjukkan hubungan antar komponen/peralatan listrik sehingga membentuk suatu sistem kelistrikan.
2. Library, informasi mengenai semua peralatan yang akan dipakai dalam sistem kelistrikan. Data elektris maupun mekanis dari peralatan yang detail/lengkap dapat mempermudah dan memperbaiki hasil simulasi/analisa.
3. Standar yang dipakai, biasanya mengacu pada standar IEC atau ANSII, frekuensi sistem dan metode – metode yang dipakai.
4. Study Case, berisikan parameter – parameter yang berhubungan dengan metode studi yang akan dilakukan dan format hasil analisa.
Elemen AC Proteksi Sistem Tenaga Listrik
Komponen elemen AC pada software power station ETAP dalam bentuk diagram satu garis ditunjukkan pada gambar, kecuali elemen-elemen IDs, penghubung bus dan status. Semua data elemen AC dimasukkan dalam editor yang telah dipertimbangkan oleh para ahli teknik. Daftar seluruh elemen AC pada software power station ETAP ada pada AC toolbar ditunjukkan pada gambar 2.13
Gambar 2.13 : Gambar AC toolbar di ETAP Elemen-elemen AC di ETAP
1. Transformator
Transformator 2 kawat sistem distribusi dimasukkan dalam editor power station software transformator 2 kawat pada power station software ETAP ditunjukkan Gambar 2.14 Simbol transformator 2 kawat.
Gambar 2.14 : Simbol transformator 2 kawat di ETAP 2. Generator
Generator sinkron sistem distribusi tenaga listrik dimasukkan dalarn editor power station ETAP berupa rating KV, rating MW, dan mode kerja yang ditampilkan pada bagian atas informasi editor generator. Simbol generator sinkron pada power station software ETAP ditunjukkan pada gambar 2.15
Gambar 2.15 : Simbol Generator di ETAP 3. Load
Beban listrik sistem distribusi tenaga listrik dimasukkan dalarn editor power station ETAP berupa rated kV dan MVA yang ditampilkan pada bagian atas iriformasi editor load. Di ETAP terdapat dua macam beban, yaitu beban statis dan beban dinamis. Simbol load pacla power station software ETAP ditunjukkan pada gambar 2.16
Gambar 2.16 : Simbol beban statis dan dinamis di ETAP
4. Pemutus Rangkaian
Merupakan sebuah saklar otomatis yang dirancang untuk melindungi sebuah rangkaian listrik dari kerusakan yang disebabkan oleh kelebihan beban atau hubungan pendek. Simbol pemutus rangkaian di ETAP ditunjukkan pada gambar 2.17
Gambar 2.17 : Simbol pemutus rangkaian di ETAP 5. Bus
Bus AC atau node sistem distribusi tenaga listrik dimasukkan dalam editor power station software ETAP.Editor bus sangat membantu untuk pemodelan berbagai tipe bus dalam sistem tenaga listrik.Generator, motor dan beban statik adalah elemen yang dapat dihubungkan dengan beberapa bus yang diinginkan.Simbol bus pada power station software ETAP ditunjukkan garnbar 2.18.
Gambar 2.18 : Simbol bus di ETAP
Elemen-elemen di ETAP
Suatu sistem tenaga terdiri atas sub-sub bagian, salah satunya adalah aliran daya dan hubung singkat. Untuk membuat sirnulasi aliran daya dan hubung singkat, maka data-data yang dibutuhkan untuk menjalankan program simulasi antara lain:
1. Data Generator 2. Data Transformator 3. Data Kawat Penghantar 4. Data Beban
5. Data Bus Elemen Aliran Daya
Program analisis aliran daya pada software ETAP dapat menghitung tegangan pada tiap-tiap cabang, aliran arus pada sistem tenaga listrik, dan aliran daya yang mengalir pada sistem tenaga listrik.Metode perhitungan aliran daya dapat dipilih untuk efisiensi perhitungan yang lebih baik. Metode perhitungan aliran daya pada software ETAP ada tiga, yaitu: Newton Raphson, Fast-Decouple dan Gauss Seidel seperti yang telah diuraikan sebelumnya.
Elemen toolbar aliran daya ditunjukkan pada gambar 2.19
Gambar 2.19 : Toolbar Load Flow di ETAP
Gambar dari kiri ke kanan menunjukkan tool dan toolbar aliran daya, yaitu:
1. Run Load Flow adalah icon toolbar aliran daya yang menghasilkan atau menampilkan hasil perhitungan aliran daya sistem distribusi tenaga listrik dalam diagram satu garis.
2. Update Cable Load Current adalah icon toolbar untuk merubah kapasitas arus pada kabel sebelum load flow di running
3. Display Option adalah bagian tombol untuk menampilkan hasil aliran daya.
4. Alert adalah icon untuk menampilkan batas kritis dan marginal dari hasil keluaran aliran daya sistem distribusi tenaga listrik.
5. Report Manager adalah icon untuk menampilkan hasil aliran daya dalam bentuk
6. report yang dapat dicetak.