i
PERANGKAT PENGENDALI DAN PEMANTAU FISH FEEDER
PADA SISTEM OTOMASI RUMAH MENGGUNAKAN
LAYANAN
SHORT MESSAGE SERVICE (SMS)
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh :
FERIAWAN MURTI NIM : 065114003
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
CONTROLLINNG AND MONITORING EQUIPMENT FISH FEEDER AT HOME OTOMATION SYSTEM USING
SHORT MESSAGE SERVICE (SMS)
Presented as Partial Fulfillment of the Requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
FERIAWAN MURTI NIM : 065114003
ELECTRICAL ENGINERING STUDY PROGRAM
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
iii
LEMBAR PERSETUJUAN
TUGAS AKHIR
PERANGKAT PENGENDALI DAN PEMANTAU FISH FEEDER
PADA SISTEM OTOMASI RUMAH MENGGUNAKAN
LAYANAN
iv
HALAMAN PENGESAHAN
PERANGKAT PENGENDALI DAN PEMANTAU FISH FEEDER
PADA SISTEM OTOMASI RUMAH MENGGUNAKAN
LAYANAN
SHORT MESSAGE SERVICE (SMS)
Oleh :
FERIAWAN MURTI
v
HALAMAN PERSEMBAHAN DAN MOTTO
“
““ iii nnniii bbbuuukkkaaannn aaakkkhhhiii rrr mmmeeelll aaaiii nnnkkkaaannn aaawwwaaalll uuunnnttt uuukkk ttt eeerrr uuusss mmmeeennngggeeejjj aaarrr aaannngggaaannn ccciiittt aaa---ccciii ttt aaa”””
“
““ kkkeeerrrjjj aaa kkkeeerrraaasss dddeeemmmiii iii mmmpppiii aaannn yyyaaannnggg bbbeeesssaaarrr”””
“
““ bbbeeerrr ggguuunnnaaa bbbaaagggiii dddiiirrr iii ssseeennndddiii rrriii dddaaannn ssseeesssaaammmaaa “““
“
““GGGBBBUUU”””
Kupersembahkan karya tulis ini kepada :
Tuhan Yesus Kristus,
Bapak dan Ibu Tercinta,
Kedua saudaraku Mas Sigit dan Ratih,
vi
HALAMAN PERNYATAAN KEASLIAN KARYA
Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis ini tidak memuat
karya atau bagian karya orang lain, kecuali yang telah disebutkan dalam kutipan dan daftar pustaka,
sebagaimana layaknya karya ilmiah.
Yogyakarta, 23 September 2010
vii
LEMBAR PERNYATAAN PERSETUJUAN
PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma :
Nama : Feriawan Murti
Nomor Mahasiswa : 065114003
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan Universitas Sanata
Dharma karya ilmiah saya yang berjudul :
PERANGKAT PENGENDALI DAN PEMANTAU FISH FEEDER PADA SISTEM OTOMASI RUMAH MENGGUNAKAN LAYANAN
SHORT MESSAGE SERVICE (SMS)
beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan kepada
Perpustakaan Universitas Sanata Dharma hak untuk menyimpan, me-ngalihkan dalam bentuk media
lain, mengelolanya dalam bentuk pangkalan data, mendistribusikan secara terbatas, dan
mempublikasikannya di Internet atau media lain untuk kepentingan akademis tanpa perlu meminta
ijin dari saya maupun memberikan royalti kepada saya selama tetap mencantumkan nama saya
sebagai penulis.
Demikian pernyataan ini yang saya buat dengan sebenarnya.
Yogyakarta, 29 September 2010
viii
INTISARI
Seseorang yang memiliki aktivitas tinggi untuk memenuhi kebutuhan hidup, memiliki waktu yang singkat ketika berada di rumah guna menjaga kenyamanan rumah. Salah satu kebutuhannya adalah untuk melakukan pengendalian dan pemantauan fish feeder pada kolam rumah maupun aquariam secara efisien. Perancangan pengendalian dan pemantauan fish feeder memberikan solusi kendali jarak jauh agar penghuni rumah dapat merasa nyaman.
Perangkat pengendali dan pemantau fish feeder dilakukan untuk mempermudah pengguna dalam proses pengendalian dan pemantauan pada sistem otomasi rumah menggunakan layanan Short Message Service (SMS) pada jaringan Global System for Mobile Communications (GSM). SMS digunakan sebagai media pengiriman pesan yang berisi format untuk mengendalikan dan memantau fish feeder. Sistem minimum berfungsi untuk melakukan proses pengendalian dan pemantauan saat ada SMS masuk.
Sistem pengendali dan pemantau fish feeder menggunakan SMS dapat bekerja dengan baik. SMS yang masuk diolah dengan baik oleh sistem minimum dan perintah yang dikirimkan dengan yang terjadi pada pengendalian fish feeder sudah sesuai. Kekurangan dalam perancangan ini adalah dalam pembuatan perangkat fish feeder yang masih butuh perbaikan, terutama dalam mendesain penutup lubang pembukaan agar dapat bekerja dengan baik
ix
ABSTRACT
Someone who has high activity in there life, has a limited time at there home. One of there need is having capability to control and monitor fish feeder at the fish pond or aquarium in a efficient way. Fish feeder controlling and monitoring system is a solution tothe need of remote controlling
This system is using SMS in the GSM network to control and monitoring the home automation system. SMS is used as message transmission medium that consist of certain format to control and monitor the system.
Minimum system is used to process controlling and monitoring when there is SMS coming in. SMS that is received, is well processed by the minimum system and the command that have been transmited can control the fish feeder accordingly. The lack of this design is the fish feeder device that still have to forter developed, specially for opening door at the feeding hole.
x
KATA PENGANTAR
Syukur dan terima kasih kepada Tuhan Yesus Kristus atas segala rahmat dan karunia-Nya sehingga tugas akhir dengan judul “PerangkatPengendali dan Pemantau Fish Feeder
pada Sistem Otomasi Rrumah Menggunakan Layanan Short Message Service (SMS)” ini dapat diselesaikan dengan baik.
Selama menulis tugas akhir ini, penulis menyadari bahwa ada begitu banyak pihak yang telah
memberikan bantuan dengan caranya masing-masing, sehingga tugas akhir ini bisa diselesaikan. Oleh
karena itu penulis ingin mengucapkan terima kasih kepada:
1. Bapak Yosef Agung Cahyanta, selaku Dekan Fakultas Sains dan Teknologi Universitas Sanata Dharma Yogyakarta.
2. Bapak Damar Wijaya, S.T., M.T., selaku dosen pembimbing yang telah dengan sabar
membimbing, memberi semangat dan saran yang membantu penulis dalam menyelesaikan
tulisan ini.
3. Seluruh dosen teknik elektro dan laboran yang telah banyak memberikan pengetahuan kepada
penulis selama kuliah.
4. Kedua Orang Tua tercinta terimakasih atas doa, kesabaran, dan dukungan baik secara moril
ataupun materil.
5. Kedua saudaraku tercinta, trimaskasih atas dukungannya selama mengerjakan tugas akhir ini.
6. Kelompok kerja GSM, terimakasih atas kekompakan, kerjasama, dan solidaritasnya.
7. Angkatan 2006 yang selalu kompak, terimakasih atas kebersamaan selama ini.
8. Anak kost wisma jago, terimakasih atas persahabatan kita selama hidup di perantauan.
9. Berbagai pihak yang tidak bisa penulis sebutkan satu-persatu atas bantuan, dukungan,
xi
Dengan rendah hati penulis menyadari bahwa tugas akhir ini masih jauh dari sempurna, oleh
karena itu berbagai kritik dan saran untuk perbaikan tugas akhir ini sangat diharapkan. Akhir kata,
semoga tugas akhir ini dapat bermanfaat bagi semua pihak. Terima kasih.
Yogyakarta, 29 September 2010
xii
DAFTAR
ISI
HALAMAN JUDUL... i
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA... v
HALAMAN PERSEMBAHAN ... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xii
DAFTAR GAMBAR ... xvi
DAFTAR TABEL ... xix
BAB I PENDAHULUAN ... 1
1.1. Latar belakang masalah ... 1
1.2.Tujuan dan Manfaat penelitian ... 2
1.3. Batasan Masalah ... 2
1.4.Metodologi Penelitian ... 3
1.5. Sistematika Penulisan ... 4
BAB II DASAR TEORI ... 5
2.1. Global System for Mobile Communications ... 5
2.1.1.Mobile station ... 6
2.1.2. Base Station Subsystem ... 6
2.1.3. Switching System ... 7
xiii
2.2. Short Message Service ... 8
2.2.1. Mekanisme Store dan Forward pada SMS ... 8
2.2.2. SMS Gateway ... 9
2.3. Gammu ... 10
2.4. Software XAMPP ... 10
2.5. Komunikasi Serial RS-232 ... 12
2.5.1. Konfigurasi Null Modem ... 13
2.5.2.
Transmisi Data pada RS-232
... 142.5.3. IC MAX 232 ... 14
2.6. Telepon Seluler SiemensC55 ... 15
2.7. Mikrokontroler ATMega8535 ... 15
2.7.1. Arsitektur ATMega8535 ... 16
2.7.2. Fitur ATMega8535 ... 16
2.7.3. Konfigurasi Pin ATMega8535 ... 16
2.8. Motor Servo ... 17
2.8.1. Konsep Motor Servo ... 19
BAB III PERANCANGAN ALAT ... 20
3.1. Proses Kerja Sistem Otomatis Fish Feeder ... 20
3.2. Identifikasi Kebutuhan Perangkat ... 21
3.3. Format SMS yang Digunakan ... 21
3.4. Perancangan Database ... 22
3.5. Perancangan Perangkat Keras (Hardware) ... 23
3.5.1. Perancangan Motor Servo Dengan Perangkat Fish Feeder ... 24
3.5.2. Perancangan RS-232 ... 24
3.5.3. Perancangan Switch ... 25
3.5.4. Perancangan Sistem Mimimum dengan Beban ... 26
xiv
3.6. Perancangan Perangkat Lunak (Software) ... 28
3.6.1. Perancangan Program pada Mikrokontroler ... 28
3.6.1.1. PerancanganPengendalian Beban ... 28
3.6.1.2. Subroutine Pemantauan Mikrokontroler ... 30
3.6.2. Perancangan Program pada Komputer ... 31
3.6.2.1. Subroutine SMS Pengiriman ... 33
3.6.2.2. Subroutine Konfirmasi Kesalahan ... 34
3.6.2.3. Subroutine Pemantauan pada Komputer ... 35
BAB IV HASIL DAN PEMBAHASAN ... 36
4.1. Gambar Alat ... 36
4.2. Pembahasan Data Hasil Pengujian Sistem ... 38
4.3. Pembahasan Perangkat Lunak (Software) ... 39
4.3.1. Pembahasan Program pada Komputer... 39
4.3.1.1. Pembahasan Database ... 39
4.3.1.2. Menu ... 41
4.3.1.3. Pengiriman Pesan Error Pembukaan ke Pengguna ... 48
4.3.1.4. Add Nomor ... 49
4.3.1.5. Add Pesan ... 50
4.3.1.6. Record ... 51
4.3.1.7. Keluar ... 52
4.3.2. Pembahasan Komunikasi Serial RS232 ... 52
4.3.3. Pembahasan Program Pada Mikrokontroler ... 53
4.4. Pembahasan Perangkat Keras (Hardware) ... 55
4.4.1. Pembahasan Sistem Minimum Mikrokontroler ... 55
4.4.2. Pengendalian Motor Servo pada Perangkat Fish Feeder ... 56
BAB V KESIMPULAN DAN SARAN ... 59
xv
5.2. Saran ... 59
DAFTAR PUSTAKA ... 60
xvi
DAFTAR GAMBAR
Gambar 1.1 Diagram Blok Pengendalian dan Pemantau Fish Feeder ... 3
Gambar 2.1. Elemen Jaringan GSM ... 6
Gambar 2.2. Alur Pengiriman SMS ... 8
Gambar 2.3. Aplikasi Teknologi yang Menunjang SMS Gateway ... 9
Gambar 2.4. Konektor RS-232(DB9) ... 12
Gambar 2.5. Kaki DTR ... 13
Gambar 2.6. IC MAX232 ... 14
Gambar 2.7. Pin Eksternal Siemens C55 ... 15
Gambar 2.8. ATMega8535 ... 17
Gambar 2.9. Motor Servo ... 17
Gambar 2.10. Sudut dari Sumbu Motor Servo ... 18
Gambar 2.11. Pin Output Kabel Motor Servo ... 18
Gambar 2.12. Arah Putaran Servo ... 19
Gambar 3.1. Diagram Blok SistemOtomatis Fish Feeder... 20
Gambar 3.2. Perancangan Motor Servo dengan Perangkat Fish Feeder ... 24
Gambar 3.3. Rancangan RS-232 ... 25
Gambar 3.4. Rancangan Switch ... 25
Gambar 3.5. Rancangan Mimimum Sistem dengan Beban ... 26
Gambar 3.6. Rancangan Keseluruhan ... 27
Gambar 3.7. Flowchart Pengendalian Beban ... 29
Gambar 3.8. FlowchartSubroutine Pemantauan pada Mikrokontroler ... 31
Gambar 3.9. Flowchart Program pada Komputer ... 32
Gambar 3.10. Flowchart Subroutine SMS Pengiriman ... 33
Gambar 3.11. FlowchartSubroutine Konfirmasi Kesalahan ... 34
xvii
Gambar 4.1. Gambar Fisik Alat Secara Keseluruhan ... 36
Gambar 4.2. Gambar Rangkaian Elektronis ... 36
Gambar 4.3. Gambar Rangkaian RS-232 ... 37
Gambar 4.4. Gambar Regulator Tegangan ... 37
Gambar 4.5. Gambar Sistem Minimum ... 37
Gambar 4.6. Tampilan Form Keseluruhan Program ... 42
Gambar 4.7. Tampilan Ketika Tombol Menu Diaktifkan ... 43
Gambar 4.8 Form2 Nomor Pengirim Tidak Sesuai Database. ... 43
Gambar 4.9.Kesalahan Nomor Pengirim... 44
Gambar 4.10. Form2 Isi Pesan Tidak Sesui dengan Database ... 44
Gambar 4.11. Kesalahan Isi Pesan yang Diterima Pengirim ... 45
Gambar 4.12. Form2 Nomor dan Isi Pesan Sudah Sesuai Database ... 45
Gambar 4.13. Form2 Ketika Mendapat Balasan dari Mikrokontroler ... 48
Gambar 4.14. Pesan Balasan Setelah Pengendalian ... 48
Gambar 4.15. Form2 Menampilkan Pesan Error dari Mikrokontroler ... 49
Gambar 4.16. Pesan Error yang Diterima Pengguna ... 49
Gambar 4.17. Form3 untuk Menambah Nomor Pengirim dalam Database ... 49
Gambar 4.18. Form3 Ketika Menambah Nomor Pengguna dalam Database ... 50
Gambar 4.19. Form4 untuk Menambah Isi Pesan dalam Database ... 51
Gambar 4.20. Form4 Ketika Menambah Isi Pesan dalam Database... 51
Gambar 4.21. Form5 untuk Data Record ... 51
xix
DAFTAR
TABEL
Tabel 2.1. Keterangan Pin RS-232 ... 13
Tabel 2.2. Keterangan Susunan Pin Eksternal Siemens C55 ... 15
Tabel 3.1. Format SMS untuk Pengendalian dan Pemantauan ... 21
Tabel 4.1. Format SMS yang Tersimpan pada Database ... 38
Tabel 4.2. Data Hasil Pengujian ... 38
Tabel 4.3. DatabaseMicrosoft Access yang Digunakan ... 41
Tabel 4.4. DatabaseMySQLServer yang Digunakan ... 41
1
BAB I
PENDAHULUAN
1.1
Latar Belakang
Dalam kehidupan sehari-hari, masyarakat masih bergantung pada alat seperti remote control untuk mengendalikan perangkat elektronik jarak jauh, misalnya televisi, radio, dan lain lain. Pengendalian remote control hanya dapat dilakukan pada jarak tertentu. Apabila jarak alat yang dikendalikan melewati batas toleransi, maka peralatan tersebut tidak dapat berfungsi sesuai dengan keinginan. Salah satu cara untuk mengatasi masalah tersebut yaitu dengan membuat perangkat yang berfungsi seperti remote control tetapi menggunakan Short Message Service (SMS) yang terdapat dalam telepon seluler (ponsel) dengan memanfaatkan jaringan Global System For Mobile Communication (GSM).
Ponsel merupakan contoh teknologi yang sangat membantu dalam hal komunikasi. Pengguna ponsel saat ini tidak hanya berada pada golongan tertentu, namun sudah menjadi kebutuhan semua lapisan masyarakat. SMS merupakan salah satu layanan yang terdapat pada ponsel yang hampir setiap orang mengenalnya [1]. SMS menyediakan pengiriman pesan text secara cepat, mudah dan murah [2]. Saat ini SMS tidak terbatas untuk komunikasi antar manusia pengguna saja, namun juga bisa dibuat otomatis dikirim/diterima oleh peralatan (komputer, mikrokontroler) untuk mencapai suatu tujuan tertentu. Pada penelitian ini, aplikasi SMS dimanfaatkan untuk pengendali dan pemantau fish feeder sebagai bagian dari sistem otomasi rumah. Sistem otomasi rumah atau dikenal dengan Home Automation System adalah suatu sistem yang bekerja untuk sebuah rumah agar nyaman ditempati pemiliknya [3].
2
1.2
Tujuan dan Manfaat
Penelitian ini bertujuan untuk menghasilkan alat yang dapat membantu kenyamanan penghuni rumah dalam hal ini perangkat pengendali dan pemantau fish feeder pada sistem otomasi rumah menggunakan layanan SMS.
Manfaat penulisan ini adalah : a. Bagi masyarakat
Penelitian ini untuk memberikan kemudahan kepada masyarakat, khususnya masyarakat menengah keatas dalam keamanan dan kenyaman rumah dengan memanfaatkan fitur SMS pada jaringan GSM, serta pengembangan lebih lanjut dari pemanfaatan teknologi terutama teknologi wireless dalam membantu menjawab tantangan yang ada.
b. Bagi mahasiswa
Penelitian ini akan menambah wawasan mahasiswa Teknik Elektro tentang pengendalian dan pemantauan fish feeder pada sistem otomasi rumah menggunakan layanan SMS pada ponsel dengan memanfaatkan jaringan GSM
c. Bagi lembaga pendidikan
Penelitian ini dapat memberikan informasi pada lembaga pendidikan tentang home automation system atau sistem otomasi rumah untuk memberikan kenyamanan pemilik rumah yang berupa alat pengendalian dan pemantau fish feeder menggunakan layanan SMS pada ponsel dengan memanfaatkan jaringan GSM, sehingga memperkaya kepustakaan yang ada.
1.3 Batasan Masalah
Batasan masalah pada penelitian ini adalah:
a. Pengontrol jarak jauh menggunakan ponsel melalui jaringan GSM .
b. Menggunakan RS-232 sebagai komunikasi serial antara komputer dengan Mikrokontroler.
c. Menggunakan Mikrokontroler ATMega8535. d. Software interface menggunakan gammu
e. Motor servo sebagai beban penggerak sistem dengan pembukaan berjenjang. f. Menggunakan ponsel GSM tipe Siemens model C55 sebaggai pengendali
1.4 Metodologi Penelitian
3
a. Studi Literatur
Mempelajari karakteristik GSM, prinsip kerja dari sistem otomatis fish feeder
menggunkan teknologi SMS, gammu, komunikasi serial RS-232, mikrokontroler ATMega8535, dan motor servo sebagai penggerak sistem fish feeder.
b. Pra pembuatan/penelitian alat
Pra pembuatan alat ini dilakukan untuk memperoleh data awal tentang kondisi pembukan beban (derajad putaran motor servo) dan lama waktu yang dibutuhkan untuk pembukaan yang sesungguhnya. Pra pembuatan alat dilakukan dengan menguji motor servo dengan torsi 10-13 kg.
c. Perencanaan dan Pembuatan Alat
Perencanaan dan pembuatan alat bertujuan untuk mendapatkan bentuk yang optimal dari sistem yang akan dibuat. Perancangan alat ini meliputi perancanagan perangkat lunak
(software) dan perangkat keras (hardware). Hal ini dilakukan dengan mempertimbangkan permasalahan dan kebutuhan yang telah ditentukan. Blok sistem yang akan dirancang ditunjukkan pada Gambar 1.1.
Berdasarkan Gambar 1.1, rangkaian akan bekerja bila ponsel pada sisi pengguna memberikan interupsi melalui jaringan GSM ke ponsel pengendali yang terhubung dengan komputer. Interupsi tersebut akan diteruskan komputer ke Mikrokontroler. Kemudian Mikrokontroler akan mengolah interupsi untuk mengendalikan beban.
d. Pengujian Alat dan Pengambilan Data
Rangkaian akan bekerja apabila antara ponsel dengan komputer telah tersinkronisasi. Dalam keadaan tersinkronisasi, ponsel pada sisi pengguna dapat memberi interupsi melalui komputer. Mikrokontroler akan mengolah interupsi dari komputer untuk menggerakkan beban/motor servo. Setelah itu mikrokontroler akan mengirim kembali keadaan terakhir beban ke komputer dan menyajikan dalam bentuk informasi ke ponsel pengguna. Teknik
ponsel ponsel komputer
AVR ATMega8535
Beban /motor servo Mikro
switch
operator
GSM USB port RS-232
Power supply
5V
4
pengujian alat dilakukan dengan mengaplikasikan sistem antara perangkat lunak dengan perangkat keras. Pengambilan data dapat dilakukan dengan pengujian alat tersebut yaitu pengujian antar subsistem perangkat keras.
e. Analisa dan Pengambilan Kesimpulan
Analisa data dilakukan dengan perbandingan antara data yang diperoleh pada perancangan dengan teori. Pengambilan kesimpulan dapat dilakukan dengan menghitung
error yang terjadi.
1.5. Sistematika Penulisan
Sistematika penulisan laporan ini adalah sebagai berikut: BAB I PENDAHULUAN
Pendahuluan berisi latar belakang masalah, tujuan dan manfaat penelitian, batasan masalah, metodologi penelitian dan sistematika penulisan.
BAB II DASAR TEORI
Bab ini berisi teori-teori yang mendukung kerja sistem dan teori yang digunakan dalam perancangan perangkat keras serta perangkat lunak.
BAB III RANCANGAN PENELITIAN
Bab ini berisi penjelasan alur perancangan sistem, format SMS yang digunakan, perancangan perangkat keras, dan perancangan perangkat lunak.
BAB IV HASIL DAN PEMBAHASAN
Bab ini berisi pembahasan data yang diperoleh, pembahasan program, dan pengujian alat yang dibuat
BAB V KESIMPULAN DAN SARAN
5
BAB II
DASAR TEORI
Bab ini membahas teori-teori tentang Global System for Mobile Communications
(GSM), Short Message Service (SMS), gammu, XAMPP, komunikasi serial RS-232, Mikrokontroler ATMega8535, dan motor servo.
2.1 Global System for Mobile Communications
Global System for Mobile Communications (GSM) muncul pada pertengahan 1991 dan dijadikan standar telekomunikasi selular untuk seluruh Eropa oleh ETSI (European Telecomunication Standard Institute) [4]. Pengoperasian GSM secara komersil dimulai pada awal kuartal terakhir 1992. GSM merupakan teknologi yang kompleks dan butuh pengkajian yang mendalam untuk bisa dijadikan standar. Standar type approval untuk ponsel disepakati dengan mempertimbangkan dan memasukkan puluhan item pengujian dalam memproduksi GSM.
GSM telah mengantisipasi perkembangan jumlah penggunanya yang sangat pesat dan arah pelayanan per area yang tinggi. GSM mengatasi perkembangan tersebut dengan
Digital Cellular System (DCS) pada alokasi frekuensi 1800 Mhz. Pada frekuensi tersebut, kapasitas pelanggan yang semakin besar per satuan sel akan dicapai. Selain itu, DCS akan dapat menurunkan kekuatan daya pancar ponsel dengan luas sel yang semakin kecil, sehingga bahaya radiasi yang timbul dapat dikurangi. Sel merupakan unit dasar sistem selular. Setiap sel memiliki sebuah base station yang terdiri dari tower dan bangunan kecil berisi perangkat radio.
Pemakaian GSM kemudian meluas ke Asia dan Amerika, termasuk Indonesia. Indonesia awalnya menggunakan sistem ponsel analog yang bernama Advances Mobile Phone System (AMPS) dan Nordic Mobile Telephone (NMT). Namun dengan hadir dan dijadikan standar sistem komunikasi selular membuat sistem analog perlahan menghilang, tidak hanya di Indonesia, tapi juga di Eropa. Pengguna GSM pun semakin lama semakin bertambah. Akhirnya GSM tumbuh dan berkembang sebagai sistem telekomunikasi seluler yang paling banyak digunakan di seluruh dunia.
Jaringan GSM dibagi menjadi 4 sistem utama: mobile station (MS), system switching
and Support System (OSS). Secara umum, network element dalam jaringan GSM ditunjukkan pada Gambar 2.1.
Gambar 2.1. Elemen Jaringan GSM [4]
2.1.1 Mobile Station
Mobile station (MS) merupakan perangkat yang digunakan oleh pelanggan untuk melakukan proses komunikasi. MS terdiri atas :
a. Mobile Equipment(ME)
Mobile Equipment atau ponsel merupakan perangkat GSM yang berada di sisi pengguna atau user yang berfungsi sebagai terminal transceiver (pengirim dan penerima sinyal) untuk berkomunikasi dengan perangkat GSM lainnya. ME diidentifikasikan dengan
International Mobile Equipment Identity (IMEI) tertentu. IMEI merupakan nomor seri perangkat dengan tipe code tertentu.
b. Subscriber Identity Module (SIM)
Subscriber Identity Module atau SIM Card atau smart card merupakan kartu yang berisi seluruh informasi pelanggan dan beberapa informasi pelayanan. ME tidak dapat digunakan tanpa SIM di dalamnya.
2.1.2 Base station Subsystem
a. Base Transceiver Station
Base Transceiver Station (BTS) merupakan perangkat pemancar dan penerima yang memberikan pelayanan radio kepada MS. BTS juga terdapat kanal trafik yang digunakan untuk komunikasi.
b. Base Station Controller
Base Station Controller (BSC) membawahi satu atau lebih BTS serta mengatur trafik yang datang dan pergi dari BSC menuju MSC atau BTS. BSC mengatur sumber radio dalam pemberian frekuensi untuk setiap BTS dan mengatur handover ketika MS melewati batas antar sel
2.1.3 Switching System
Switching System (SS) bertanggung jawab untuk melakukan pemrosesan panggilan dan fungsi yang berhubungan dengan pelanggan. SS meliputi unit fungsional yang terdiri atas:
a. Mobile Switching Center
Mobile Switching Center (MSC) didesain sebagai switch ISDN (Integrated Service Digital Network) yang dimodifikasi agar berfungsi untuk jaringan seluler. MSC juga dapat menghubungkan jaringan seluler dengan jaringan fixed.
b. Home Location Register
Home Location Register (HLR) merupakan database yang berisi data pelanggan yang tetap. Data tersebut antara lain, layanan pelanggan, layanan tambahan serta informasi mengenai lokasi pelanggan yang paling akhir (update).
c. Visitor Location Register
Visitor Location Register (VLR) merupakan database yang berisi informasi sementara mengenai pelanggan, terutama mengenai lokasi dari pelanggan pada cakupan area jaringan.
d. Authentication Center
Authentication Center (AuC) merupakan database informasi rahasia yang disimpan dalam bentuk format kode. AuC digunakan untuk mengontrol penggunaan jaringan yang sah dan mencegah semua pelanggan yang melakukan kecurangan.
e. Equipment Identity Registration
2.1.4 Operation and Support System
Operation and Support System (OSS) berfungsi sebagai pusat pengendalian, di antaranya fault management, configuration management, performance management, dan
inventory management.
2.2 Short Message Service
Short Message Service (SMS) merupakan layanan messaging yang pada umumnya terdapat pada setiap sistem jaringan wireless digital. SMS adalah layanan untuk mengirim dan menerima pesan tertulis (teks) dari maupun ke perangkat bergerak (Device Mobile) [1]. Pesan teks yang dimaksud tersusun dari huruf, angka, atau karakter alfanumerik. Pesan teks
dikemas dalam satu paket/ frame yang berkapasitas maksimal 160 byte yang dapat direpresentasikan berupa160 karakter huruf latin atau 70 karakter alfabet non-latin seperti alfabet Arab atau Cina.
2.2.1 Mekanisme store dan forward pada SMS
SMS adalah data tipe asynchronous message dengan pengiriman data dilakukan dengan mekanisme protocol store and forward. Pengirim dan penerima SMS tidak perlu berada dalam status berhubungan satu sama lain ketika akan saling bertukar pesan. Operator menyediakan SMS Center (SMSC) untuk implemantasi mekanisme SMS. Secara fisik SMSC dapat berwujud sebuah komputer biasa yang mempunyai interkonektivitas dengan jaringan GSM. Alur pengiriman SMS pada standar teknologi GSM ditunjukkan pada Gambar 2.2 [2].
Pengiriman pesan secara store and forward berarti pengirim pesan SMS menuliskan pesan dan nomor tujuan dan kemudian mengirimkannya (store) ke server SMS
(SMS-Center) yang kemudian bertanggung jawab untuk mengirim pesan tersebut (forward) ke nomor tujuan [2]. Jika ponsel sedang tidak aktif, maka pesan tetap disimpan di SMSC itu sendiri, menunggu MSC memberitahukan bahwa ponsel sudah aktif kembali dan SMS dikirim dengan batas maksimum waktu tunggu yaitu validity period dari pesan SMS itu sendiri. Jika ponsel tujuan aktif, maka pesan disampaikan MSC lewat jaringan yang sedang mengendalikan penerima (BSC dan BTS).
2.2.2 SMS Gateway
SMS adalah sebuah perangkat lunak yang menggunakan bantuan komputer dan memanfaatkan teknologi cellphone [5]. Gambar 2.3 menunjukkan aplikasi teknologi yang menunjang SMS Gateway agar dapat berfungsi. Fungsi komputer dan teknologi cellphone
adalah untuk mengintegrasikan dan mendistribusikan pesan-pesan yang disatukanmelalui sistem informasi yaitu media SMS yang diatasioleh jaringan seluler.
Gambar 2.3 Aplikasi Teknologi yang Menunjang SMS Gateway [5]
Secara khusus, sistem ini akan memiliki fungsi-fungsi sebagai berikut: 1. Message Management dan Delivery
a. Pengaturan pesan yang meliputi manajemen prioritas pesan, manajemen pengirimanpesan, dan manajemen antrian.
b. Pesan yang dilalukan harus sedapat mungkin fail safe. Artinya, jika terdapat gangguan pada jaringan telekomunikasi, maka sistem secara otomatis akan mengirim ulang pesan tersebut.
Berfungsi untuk melakukan korelasi data untuk menghasilkan data baru. Pada sistem yang terpasang saat ini, arsitektur lalu lintas data melalui SMS sudah terjalin cukup baik. Hanya saja, keterbatasan akses data dan tujuan informasi SMS yang belum terfokus menyebabkan banyaknya jawaban standar (default replies) masih banyak terjadi. SMS Gateway banyak digunakan dalam berbagai proses bisnis dan usaha.
2.3 Gammu
Gammu merupakan sebuah perangkat lunak gratis yang bisa digunakan untuk kepentingan pribadi maupun komersial. Gammu memberikan akses dari PC ke berbagai macam fungsi perangkat selular yang terkoneksi. Fungsi-fungsi tersebut adalah mengirim atau menerima SMS, menerima MMS, menyalin atau menulis phonebook, dan sebagainya.
Beberapa contoh perintah gammu yang digunakan untuk memanggil data – data jaringan dari cellphone adalah :
1. –identify untuk menunjukkan informasi penting data cellphone.
2. –getdisplaystatus
3. --monitor [times] untuk menerima status telepon dan menuliskannya secara berkala dalam bentuk standar\
4. –getsecuritystatus untuk menunjukkan telepon ketika membutuhkan kode keamanan untuk aktif (seperti PIN, PUK, dan lainnya).
5. –nokiasecuritycode untuk mengijinkan user untuk mengetahui kode keamanan dari komputer
6. –setautonetworklogin
7. –listnetworks untuk menunjukkan nama atau kode jaringan GSM yang dikenal 8. --getgprspoint start [stop]
9. –networkinfo
10.–siemenssatnetmon
11.--siemensnetmonact
12.--siemensnetmonitor test
13.–nokiagetoperatorname
2.4 Software XAMPP
server yang berdiri sendiri (localhost), yang terdiri atas program Apache HTTP Server, MySQL database, dan penerjemah bahasa yang ditulis dengan bahasa pemrograman PHP dan Perl. Nama XAMPP merupakan singkatan dari:
1. X yang artinya Program ini dapat dijalankan dibanyak sistem operasi, seperti Windows, Linux, Mac OS, dan Solaris.
2. A yaitu Apache, merupakan aplikasi web server. Tugas utama Apache adalah menghasilkan halaman web yang benar kepada user berdasarkan kode PHP yang dituliskan oleh pembuat halaman web. jika diperlukan juga berdasarkan kode PHP yang dituliskan,maka dapat saja suatu database diakses terlebih dahulu (misalnya dalam MySQL) untuk mendukung halaman web yang dihasilkan.
3. M yaitu MySQL, merupakan aplikasi database server. Perkembangannya disebut SQL yang merupakan kepanjangan dari Structured Query Language. SQL merupakan bahasa terstruktur yang digunakan untuk mengolah database. MySQL dapat digunakan untuk membuat dan mengelola database beserta isinya. Kita dapat memanfaatkan MySQL untuk menambahkan, mengubah, dan menghapus data yang berada dalam database. 4. P yaitu PHP, bahasa pemrograman web. PHP memungkinkan kita untuk membuat
halaman web yang bersifat dinamis. Sistem manajemen basis data yang sering digunakan bersama PHP adalah MySQl. Namun PHP juga mendukung sistem manajemen database Oracle, Microsoft Access, Interbase, d-base, PostgreSQL, dan sebagainya.
5. P yaitu Perl, bahasa pemrograman.
Bagian-bagian XAMPP yang biasa digunakan pada umumnya adalah sebagai berikut :
a) htdoc adalah folder tempat meletakkan berkas-berkas yang akan dijalankan, seperti berkas PHP, HTML dan skrip lain.
b) phpMyAdmin merupakan bagian untuk mengelola basis data MySQL yang ada dikomputer. Untuk dapat mengaksesnya, maka buka pada halaman browser lalu ketikkan http://localhost/phpMyadmin, maka akan muncul halaman PHP Myadmin.
2.5 Komunikasi Serial RS-232
Standar RS-232 ditetapkan oleh Electronic Industry Association and Telecomunication Industry Association pada tahun 1962. Istilah lengkapnya adalah EIA/TIA-232 Interface Between Data Terminal Equipment and Data Circuit-Terminating Equipment Employing Serial Binary Data Interchange [7]. Standar ini berisi tentang komunikasi data antara komputer dengan alat-alat pelengkap komputer. Beberapa parameter yang ditetapkan EIA (Electronics Industry Association) antara lain:
a. Sebuah ‘spasi’ (logika 0) antara tegangan +3 s/d +25 volt. b. Sebuah ‘tanda’ (logika 1) antara tegangan -3 s/d -25 volt. c. Daerah tegangan antara +3 s/d -3 volt tidak didefenisikan. d. Tegangan rangkaian terbuka tidak boleh lebih dari 25 volt. e. Arus hubung singkat rangkaian tidak boleh lebih dari 500 mA.
Sebuah penggerak (driver) harus mampu menangani arus ini tanpa mengalami kerusakan. Standar RS-232 menentukan jenis-jenis sinyal yang dipakai untuk mengatur pertukaran informasi antara DTE dan DCE. Terdapat 24 jenis sinyal pada standar RS-232, tapi yang umum dipakai hanya 9 jenis sinyal. Konektor yang dipakai ditentukan dalam standar RS-232. Sinyal yang lengkap menggunakan konektor DB25, sedangkan konektor DB9 hanya bisa dipakai untuk 9 sinyal yang umum dipakai. Sinyal-sinyal yang digunakan pada standar RS232 tersebut ada yang menuju ke DCE ada pula yang berasal dari DCE. Bagi sinyal yang menuju ke DCE artinya DTE berfungsi sebagai output dan DCE berfungsi sebagai input, misalnya sinyal TD, pada sisi DTE kaki TD adalah output, dan kaki ini dihubungkan ke kaki TD pada DCE yang berfungsi sebagai input. Kebalikan sinyal TD adalah RD, sinyal ini berasal dari DCE dan dihubungkan ke kaki RD pada DTE yang berfungsi sebagai output. Gambar 2.4 menunjukkan bentuk dari konektor RS-232, sedangkan Tabel 2.1 menunjukkan keterangan dari pin RS-232.
Tabel 2.1. Keterangan Pin RS-232 [7]
2.5.1 Konfigurasi Null Modem
Konfigurasi Null Modem digunakan untuk menghubungkan dua DTE dengan diagram pengkabelan yang dapat dilihat pada Gambar 2.6. Konfigurasi Null Modem hanya membutuhkan tiga kabel antar DTE, yakni untuk TxD, RxD dan Gnd. Cara kerjanya adalah bagaimana membuat komputer agar berpikir bahwa komputer berkomunikasi dengan modem
(DCE) bukan dengan komputer lainnya.
Gambar 2.5. Kaki DTR [7]
Pada Gambar 2.5 terlihat bahwa kaki DTR (Data Terminal Ready) dihubungkan ke DSR (Data Set Ready) dan juga ke CD (Carrier Detect) pada masing masing computer. Pada saat sinyal DTR diaktifkan, maka sinyal DSR dan CD juga ikut aktif (konsep Modem
Semu atau Virtual Modem). Karena komputer dalam hal ini melakukan pengiriman data No
pin
Nama
pin Deskripsi Fungsi
1 DCD Data Carrier Detect
Saluran sinyal ini akan diaktifkan ketika DTE mendeteksi suatu carrier dari DCE.
2 RXD Received Data Sebagai penerimaan data serial.
3 TXD Transmit Data Sebagai pengiriman data serial.
4 DTR Data Terminal Ready
Dengan saluran ini, DTE memberitahukan kesiapan terminalnya.
5 GND Ground Saluran ground.
6 DSR Data Set Ready Dengan saluran ini, DTE memberitahukan bahwa siap melakukan komunikasi.
7 RST Request To Send Dengan saluran ini , DCE diminta mengirim data oleh DTE.
8 CTS Clear To Send Dengan saluran ini, DCE memberitahukan bahwa DTE boleh mulai mengirim data.
dengan kecepatan yang sama, maka kontrol aliran (flow control) belum dibutuhkan sehingga RTS (Request To Send) dan CTS (Clear to Send) pada masing masing komputer saling dihubungkan.
2.5.2 Transmisi Data pada RS-232
Komunikasi pada RS-232 dengan PC adalah komunikasi asinkron. Pada komunikasi asinkron sinyal clock tidak dikirim bersamaan dengan data. Masing-masing data disinkronkan menggunakan clock internal pada tiap-tiap sisi. Data akan ditransmisikan, tetapi sebelumnya akan diawali oleh start bit dengan logika 0 (0 Volt), kemudian 8 bit data dan diakhiri oleh satu stop bit dengan logika 1 (5 Volt).
2.5.3 IC MAX 232
Komunikasi data serial sangat berbeda dengan format pemindahan data paralel. Pengiriman bits tidak dilakukan sekaligus melalui saluran pararel, tetapi setiap bit
dikirimkan satu persatu melalui saluran tunggal. Pada pengiriman data secara serial, sinkronisasi atau penyesuaian antara pengirim dan penerima harus ada, agar data yang dikirimkan dapat diterima dengan tepat dan benar oleh penerima. Salah satu mode transmisi dalam komunikasi serial adalah mode asynchronous [8]. Format data komunikasi serial terdiri dari parameter-parameter yang dipakai untuk menentukan bentuk data serial yang dikomunikasikan. Elemen-elemen format data pada komunikasi seria terdiri dari :
1. Kecepatan mobilisasi data per bit (baud rate) 2. Jumlah bit data per karakter (data length) 3. Parity yang digunakan
4. Jumlah stop bit dan start bit
IC MAX232 dibutuhkan pada mode transmisi asynchronous yang dapat berfungsi sebagai buffer. IC MAX232 mempunyai dua receiver yang berfungsi sebagai pengubah level tegangan dari level RS232 ke level TTL dan dua drivers yang berfungsi mengubah level tegangan dari level TTL ke level RS-232. IC MAX232 ditunjukkan pada Gambar 2.6.
2.6
Telepon Seluler Sie
Siemens C55 memil pengendalian telepon selule Telepon seluler pada umum keperluan umum. Fungsi term
handsfree, dankomunikasi d dengan baud rate 19200 bps 2.8 Keterangan dari pin-pin e
Ga
Tabel 2.2. K
No pin Nama
1 Vin
2 Ground
3 Tx
4 Rx
5 CTS
6 RTS
7 DCD
8 Audio AP
9 No connec
10 Audio N 11 Ground mi
12 EPP
2.7 Mikrokontroler AT
Mikrokontroler Alf an Instruction Set Computing (R (16-bits word) dan sebagian MCS-51 yang memiliki ar instruksinya membutuhkan s 51 berbeda.
Siemens
C55miliki pin konektor eksternal yang dapat di uler dari luar dengan piranti bantu mikrokon umnya menyediakan terminal I/O khusus yang terminal I/O biasanya digunakan untuk pengisia i data. Komunikasi data pada telepon selular b ps [9]. Pin konektor dari Siemens C55 dapat d eksternal Siemens C55 terdapat pada Tabel 2.
Gambar 2.7. Pin Eksternal Siemens C55
Keterangan Susunan Pin Eksternal Siemens C5
ma pin Deskripsi
Power Charging
Saluran ground
Data output
Data input
Data line for accessory Data line for accessory or se Clock line for accessory
P Kutub positif audio
nection Tidak ada koneksi Kutub negatif audio mic Saluran ground untuk mic
External mic
ATMega8535
f and Vegard’s Risc Processor (AVR) memiliki RISC) 8 Bit, dengan semua instruksi dikemas an besar instruksi dieksekusi dalam satu siklus arsitektur Complex Instruction Set Computi
n siklus 12 clock, hal ini yang membuat ATMe
dimanfaatkan untuk ontroler ataupun PC. ang digunakan untuk isian baterai, terminal r bekerja secara serial t dilihat pada Gambar
2.2.
C55
serial cable
iki arsitektur Reduced
as dalam kode 16-bit
us instruksi clock [1].
MCS-AVR dikelompokkan kedalam 4 kelas, yaitu ATtiny, keluarga AT90Sxx, keluarga ATMega, dan keluarga AT86RFxx. Empat kelas AVR tersebut yang membedakan satu sama lain adalah ukuran onboard memori, on-board peripheral dan fungsinya. AVR menggunakan arsitektur dan instruksi yang bisa dikatakan hampir sama.
2.7.1 Arsitektur ATMega8535
Arsistektur dari ATMega8535 adalah:
a. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C dan Port D. b. ADC 10 bit sebanyak 8 saluran.
c. Tiga buah timer / counter dengan kemampuan pembandingan.
d. Komputer yang terdiri atas 32 register.
e. Watchdog Timer dengan oscilator internal. f. SRAM sebesar 512 byte.
g. Memori Flash sebesar 8 kb dengan kemampuan Read While Write.
h. Sumber interupsi internal dan eksternal.
i. Port Serial Pheriperal Interface (SPI).
j. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. k. Antarmuka komparator analog.
l. Port Universal Shynchronous Ashynchronous Receiver Transmitter(USART) untuk komunikasi serial.
2.7.2 Fitur ATMega8535
ATMega8535 memiliki karakteristik sebagai berikut:
a. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz.
b. Ukuran memory flash 8 KB, SRAM sebesar 512 byte, EEPROM sebesar 512 byte.
c. ADC internal dengan resolusi 10 bit sebanyak 8 channel.
d. Port komunikasi serial USART dengan kecepatan maksimal 2.5 Mbps. e. Enam pilihan mode sleep untuk penghematan penggunaan daya listrik.
2.7.3 Konfigurasi Pin ATMega8535
Keterangan Pin ATMega8535:
c. Port A (PA0...PA7) meru d. Port B (PB0...PB7) meru yaitu Timer/Counter, kom e. Port C (PC0...PC7) mer khusus, yaitu komparator f. Port D (PD0...PD1) m komparator analog, interr
g. RESET merupakan pin ya h. XTAL1 dan XTAL2 mer i. AVCC merupakan pin m j. AREF merupakan pin ma
Gambar 2.8 menunjukkan
2.8 Motor Servo
Motor servo adalah se motor akan diinformasikan [10]. Motor servo terdiri dari kontrol. Motor servo ditunjuk
erupakan pin I/O dua arah dan pin masukan AD erupakan pin I/O dua arah dan pin yang mempu
omparator Analog dan SPI.
erupakan port I/O dua arah dan pin yang tor analog dan Timer Oscillator.
merupakan port I/O dua arah dan pin fu
terrupt eksternal, dan komunikasi serial. yang digunakan untuk mereset mikrokontroler erupakan pin masukan clock eksternal.
masukan untuk tegangan ADC.
masukan tegangan referensi untuk ADC. kan konfigurasi dari pin ATMega 8535.
Gambar 2.8. ATMega8535[1]
h sebuah motor dengan sistem closed feedback
n kembali ke rangkaian kontrol yang ada di d ari sebuah motor, serangkaian gear, potensiom jukkan pada Gambar 2.9.
Gambar 2.9. Motor Servo[10]
DC.
punyai fungsi khusus
g mempunyai fungsi
fungsi khusus yaitu
ler.
Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Pada sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor. Pada Gambar 2.10 dapat diketahui bahwa dengan pulsa 1.5 mS pada periode selebar 2 mS maka sudut dari sumbu motor akan berada pada posisi tengah. Semakin lebar pulsa OFF, maka semakin besar gerakan sumbu ke arah jarum jam dan semakin kecil pulsa OFF, maka semakin besar gerakan sumbu ke arah yang berlawanan dengan jarum jam.
Gambar 2.10. Sudut dari Sumbu Motor Servo[10]
Motor servo biasanya hanya bergerak mencapai sudut tertentu saja dan tidak kontinyu seperti motor DC maupun motor stepper. Motor servo dapat dimodifikasi agar bergerak kontinyu untuk beberapa keperluan tertentu. Pada robot, motor servo sering digunakan untuk bagian kaki, lengan atau bagianbagian lain yang mempunyai gerakan terbatas dan membutuhkan torsi cukup besar. Gambar 2.11 menunjukan pin output kabel motor servo yang terdiri dari tiga kabel yaitu untuk port signal, V+, dan GND.
2.8.1 Konsep Motor Servo
Motor servo adalah motor yang mampu bekerja dua arah (CW dan CCW). Arah dan sudut pergerakan rotornya dapat dikendalikan hanya dengan memberikan pengaturan duty cycle sinyal PWM pada bagian pin kontrolnya.Motor Servo merupakan sebuah motor DC yang memiliki rangkaian kontrol elektronik. Motor servo memiliki internal gear untuk mengendalikan pergerakan dan sudut angularnya. Motor servo adalah motor yang berputar lambat, dimana biasanya ditunjukkan oleh rate putarannya yang lambat, namun demikian memiliki torsi yang kuat karena internal gearnya.
Motor servo banyak digunakan sebagai aktuator pada mobile robot atau lengan robot. Motor servo umunya terdiri dari servo kontinyu dan servo standar. Motor servo kontinyu dapat berputar sebesar 360 derajat. Sedangkan motor servo tipe standar hanya mampu berputar 180 derajat. Motor servo yang umum digunakan ialah Continuous Parallax. Pergerakan motor servo ke kanan atau ke kiri tergantung dari nilai delay yang diberikan. Untuk membuat servo pada posisi center, berikan pulsa 1.5ms. Untuk memutar servo ke kanan, berikan pulsa <=1.3ms, dan pulsa >= 1.7ms untuk berputar ke kiri dengan delay 20ms. hal tersebut ditunjukkan pada Gambar 2.12.
Putaran motor servo dapat diatur dengan mengatur timer pada program. Pengaturan timer dengan mode phase and correc PWM [11] seperti dibawah ini:
/ 2
Gambar 2.12. Arah Putaran Servo[10]
(a) Memutar Servo ke Kanan. (b) Memutar Servo ke Kiri
20
BAB III
PERANCANGAN ALAT
Bab ini akan membahas tentang sistem perancangan perangkat lunak dan keras otomatis fish feeder. Pembahasan ini meliputi:
a. Proses kerja sistem otomatis fish feeder. b. Perancangan perangkat keras (hardware). c. Perancangan perangkat lunak(software).
3.1 Proses Kerja Sistem Otomatis Fish Feeder
Prinsip kerja dari sistem perangkat pengendali dan pemantau fish feeder adalah dengan memanfaatkan layanan SMS pada jaringan GSM ditunjukkan pada Gambar 3.1.
Gambar 3.1 Diagram Blok SistemOtomatis Fish Feeder
Ponsel pada sisi pengguna akan memberi interupsi berupa sinyal pesan pada ponsel pengendali untuk mengetahui kondisi terakhir pada beban yang akan dikendalikan. Intrupsi dari ponsel yang berupa sinyal pesan akan diolah komputer menggunakan bahasa pemrograman. Nomor pengguna dan format pesan yang masuk ke komputer dibandinggan dengan database pengguna. Jika nomor dan isinya sesuai database, maka proses selanjutnya dapat dilakukan. interupsi pada komputer yang benar kemudian akan diambil mikrokontroler untuk mengeksekusi beban. Mikrokontroler akan medeteksi kondisi beban terakhir. Bila kondisi beban ON/aktif, maka mikrokontroler akan mengirim interupsi ke komputer bahwa
USB port Jaringan GSM
Minimum sistem Mikrokontroler
ATMega8535
Motor servo RS-232 Mikro switch
sistem telah bekerja. Interupsi yang diterima oleh komputer akan disampaikan oleh ponsel pengendali ke ponsel pada sisi pengguna dalam format pesan. Jika kondisi beban dalam keadaan OFF/tidak aktif, maka mikrokontroler akan menyampaiakan interupsi ke komputer bahwa sistem tidak bekerja. Kemudian oleh komputer interupsi tersebut dikirimkan ke ponsel pengendali dan akan dikirimkan lagi ke ponsel pada sisi pengguna. Dalam keadaan ini, berarti ponsel pengendali dapat mengirim pesan kembali untuk menjalankan sistem/beban.
3.2
Identifikasi Kebutuhan Perangkat
Sistem pengendali dan pemantau fish feeder melalui SMS terdiri dari beberapa perangkat utama (rangkaian) yaitu
1. Rangkaian Regulated Power Supply digunakan sebagai sumber tegangan DC.
2. ponsel pada sisi pengguna digunakan sebagai media pengiriman perintah untuk pengendalian beban (motor servo) dan penerimaan informasi hasil pemantauan.
3. ponsel pengendali digunakan sebagai media penerima perintah dan pengirim SMS balasan berupa informasi hasil pemantauan.
4. RS 232 digunakan agar ponsel dapat berkomunikasi dengan PC.
5. PC digunakan untuk mengolah database, sebagai penghubung port serial, dan mengetahui proses apa saja yang sedang berlangsung.
6. Kabel USB Port digunakan untuk komunikasi antara ponsel pengendali dengan komputer.
7. Mikro switch digunakan sebagai feedback pemberitahu error pembukaan beban.
8. Motor servo digunakan sebagai pengerak peranggkat fish feeder untuk membuka tempat pembukaan pakan ikan.
9. Mikrokontroler ATMega 8535 digunakan untuk pengolah data dan pengendali utama seluruh sistem.
3.3 Format SMS yang Digunakan
Format atau isi SMS yang digunakan dalam proses pengendalian dan pemantauan adalah seperti pada Tabel 3.1.
Tabel 3.1. Format SMS untuk Pengendalian dan Pemantauan
No Text No Text
1 bk1 8 No Asing
Tabel 3.1.(Lanjutan) Format SMS untuk Pengendalian dan Pemantauan
No Text No Text
3 bk3 10 buka3_ok
4 CEK 11 buka3_ok
6 error1 13 buka3_ok
6 error2 14 siap
7 error3 15 belum tutup
3.4 Perancangan Database
Database yang akan dibuat menggunakan software Microsoft Access dan software MySQL Server untuk manajemen database. Database tersebut digunakan untuk menyimpan data user, format SMS, menyimpan SMS yang diterima, dan mengirimkan SMS. Database Access dan Database MySQL yang digunakan dalam bentuk tabel.
Database dari software Microsoft Access digunakan untuk menyimpan nomor pengguna, format SMS dan menyimpan semua pesan yang masuk ke ponsel pengendalian.
Database yang digunakan untuk menyimpan nomor pengguna dan pesan yang diijinkan untuk melakukan pengontrolan maupun pemantauan adalah database NoPengguna dan FormatSMS. Tabel yang digunakan pada database. NomorPengguna dan FormatSMS terdiri dari:
1. Tabel Nomor
Tabel Nomor terdiri dari 1 field saja yaitu No. Field No digunakan untuk menyimpan nomor pengguna yang diijinkan melakukan pemantauan dan pengendalian perangkat fish feeder.
2. Tabel Pesan
Tabel pesan yang hanya terdiri dari 1 field yaitu Field Text. Field Text digunakan untuk menyimpan format SMS yang diijinkan melakukan pemantauan dan pengendalian sistem.
Database yang digunakan untuk menyimpan proses yang telah dilakukan sistem (pengontrolan, pemantauan, dan Konfirmasi kesalahan) adalah Database DataRecord. Tabel yang digunakan pada Database DataRecord adalah Tabel record terdiri dari beberapa field
yaitu: 1. No
2. NoPengguna
Field Pengirim berisi nomor pengirim yang mengirimkan SMS ke sistem 3. Pesan
Field Perintah berisi jenis perintah yang dikirimkan oleh user (pengirim) 4. Waktu
Field tanggal berisi tanggal pelaksanaan proses pengendalian, pemantauan ataupun SMS konfirmasi.
Database dari software MySQL Server adalah database yangdiperlukan oleh software Gammu untuk melakukan pembacaan dan pengiriman SMS dari komputer. Database yang digunakan pada software MySQL Server adalah database SMS dengan tabel yang digunakan adalah Tabel inbox dan Tabel outbox. Field yang digunakan pada Tabel inbox adalah sebagai berikut:
1. Field SenderNumber
Field SenderNumber digunakan untuk menyimpan nomor pengirim dari SMS yang terdapat pada inbox telepon seluler.
2. Field TextDecoded
Field TextDecoded digunakan untuk menyimpan isi SMS yang terdapat pada inbox
telepon seluler dalam bentuk text.
Field yang digunakan pada Tabel outbox adalah sebagai berikut: 1. Field DestinationNumber
Field DestinationNumber digunakan untuk menyimpan nomor tujuan dari SMS yang akan dikirimkan.
2. Field TextDecoded
Field TextDecoded digunakan untuk menyimpan isi SMS yang yang akan dikirimkan dalam bentuk text.
3.5
Perancangan Perangkat Keras (Hardware)
3.5.1 Perancangan Motor Servo Dengan Perangkat Fish Feeder
Perancangan Motor servo dengan perangkat fish feeder terdiri dari tempat pakan ikan yang berfungsi sebagai tempat penampungan pakan ikan. Tempat pakan ikan tehubung langsung dengan motor servo dan mikro switch untuk mengendalikan pembukaan tempat pakan ikan. Mikro switch berfungsi sebagai sensor untuk mengetahui keadaan perangkat fish feeder. Tempat pakan ikan juga terdapat lubang pembukaan sebagai tempat keluarnya pakan dan penutup lubang pembukaan yang terhubung dengan poros motor servo. Tempat pakan ikan terbuat dari papan yang dibentuk kotak atau empat persegi panjang dengan bagian dasarnya dibuat lebih curam ke satu sisi agar pakan dapat keluar. Lubang tempat keluarnya pakan dibuat setengah linkaran dan penutupnya juga dibuat setengah lingkaran yang terbuat dari akrilik. Lubang tempat keluarnya pakan dan penutupnya dibuat setengah lingkaran untuk menyesuaikan dengan kondisi sudut putar dari motor servo. Perancangan motor servo dengan perangkat fish feeder ditunjukkan pada Gambar 3.2.
3.5.2 Perancangan RS-232
Level tegangan TTL (transistor-transistor logic) dari ponsel GSM harus diubah ke level tegangan RS-232 pada komputer. Rangkaian komunikasi serial digunakan seperti Gambar 3.3. Perancangan ini menggunakan IC MAX232 yang mempunyai dua receiver yang berfungsi sebagai pengubah level tegangan dari level RS232 ke level TTL dan dua drivers
yang berfungsi mengubah level tegangan dari level TTL ke level RS-232.
Fungsi kapasitor pada rangkaian pengubah level tegangan TTL ke level RS232 yaitu sebagai kapasitor eksternal untuk voltage doubler, yang masing-masing kapasitor digunakan sebagai berikut:
1. C1 +, sebagai kapasitor “+” internal voltage doubler.
2. C1 -, sebagai kapasitor “+” internal voltage doubler.
3. C1 +, sebagai kapasitor “+” internal voltage inverter.
4. C1 -, sebagai kapasitor “-” internal voltage inverter.
Gambar 3.3. Rancangan RS-232
Nilai kapasitor yang digunakan (C1, C2, C3, dan C4) sesuai dengan nilai-nilai yang tertera pada datasheet MAX232 yaitu 1uf [10]. Bila nilai C1 dan C2 dinaikan, maka akan mengurangi nilai impedansi masukan rangkaian voltage doubler dan inverter. Bila nilai C3 dan C4 dinaikan, maka akan mengurangi riak catu daya.
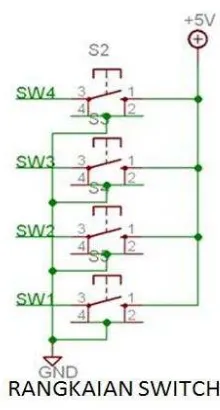
3.5.3 Perancangan Switch
Gambar 3.4. Rancangan Switch
pembukaan yang terhubung dengan mikrokontroler pada PortC.0, PortC.2, PortC.4 dan
PortC.6. Level pembukaan tersebut berdasar pada seberapa besar putaran motor servo. Switch
yang digunakan adalah micro switch. Gambar 3.4 menunjukkan rangkaian micro switch.
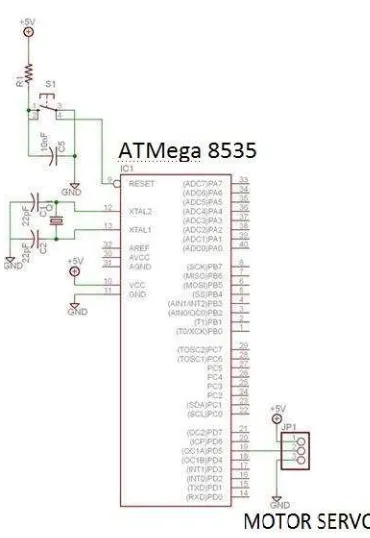
3.5.4 Perancangan Sistem Mimimum dengan Beban
Perancangan beban dalam hal ini perangkat fish feeder yang pembukaannya dikendalikan oleh motor servo langsung dihubungkan pada mikrokontroler. Motor servo terhubung dengan mikrokontroler secara langsung tanpa dihubungkan dengan driver seperti perancangan dengan motor DC. Hal ini dikarenakan pada motor servo tidak membutuhkan tegangan yang besar untuk menggerakkan perangkat fish feeder. Motor servo dapat langsung dihubungkan dengan mikrokontroler dengan tegangan 5V. Motor servo ini digunakan untuk membuka perangkat fish feeder dengan level pembukaan yang telah diatur dalam program pada mikrokontroler. Port mikrokontroler yang digunakan sebagai keluaran motor servo adalah PortD.0. Rancangan Mimimum Sistem dengan Beban ditunjukkan pada Gambar 3.5.
Switch pada mikrokontroler berfungsi sebagai reset untuk mengembalikan kondisi mikrokontroler seperti semula. Resistor dan kapasitor digunakan untuk memperoleh waktu pengosongan kapasitor. Waktu pengosongan kapasitor dapat dihitung dengan persamaan T = R x C. Capasitor yang digunakan ditentukan sebesar 10 uf sebagai bypass untuk memperkecil
ripple, sedangkan resistor yang digunakan menyesuaikan 1 k .
Pengaturan putaran motor servo seperti pada persamaan teori yaitu dengan mode phase and correc PWM. Idealnya servo yang digunakkan dapat berputar sampai 60o dengan periode 1 sampai 2 mS. Focn x PcPWM merupakan frekuensi output, Fclk I/O merupakan frekuensi osilator, N merupakan skala clock (1,8,64,256,...), TOP merupakan nilai maksimum
counter. Dengan perbandingan nilai ICR dan periodenya, maka diperoleh nilai ICR untuk mengatur seberapa lebar putaran motor servo. Nilai ICR ini digunakan dalam pengaturan progam untuk mengatur pembukaan servo.
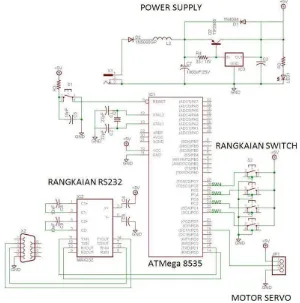
3.5.5 Perancan
g
an Keseluruhan Sistem Minimum Mikrokontroler
Sistem minimum mikrokontroler berfungsi sebagai media interface untuk melaksanakan proses yang diinginkan oleh pengguna. Sistem minimum mikrokontroler merupakam unit input maupun output dari dan ke komputer serta dalam paksanaan eksekusi ke beban. Kristal yang digunakan dalam sistem minimum mikrokontroler ini adalah kristal
internal yang diatur melalui program. Power suply dirancang menggunakan IC regulator tegangan 7805 dengan tegangan keluaran 5V. Power suply juga terdapat switch untuk mengaktifkan atau mematikan suply tegangan. Rangkaian sistem minimum dapat dilihat pada Gambar 3.6.
3.6 Perancangan Perangkat Lunak (Software)
Perangkat lunak diperlukan sebagai protokol antara ponsel dengan mikrokontroler melalui komputer. Sistem komunikasi antara ponsel pengendali dengan mikrokontroler terjadi dua arah yaitu receive dan transmit (deliver dan submit). Pengiriman pesan atau SMS dari ponsel pada sisi pengguna ke ponsel pengendali menggunakan jaringan GSM. Komunikasi data dari ponsel pengendali ke komputer menggunakan jalur USB port. Sedangkan komunikasi antara komputer dengan mikrokontroler menggunakan jalur serial
port (RS-232).
3.6.1 Perancangan Program pada Mikrokontroler
Pada perancangan program pada mikrokontroler, perangkat lunak yang digunakan sebagai programmer mikrokontroler adalah bahasa C. Bahasa C dikembangkan oleh Martin Richards pada tahun 1967. Bahasa C adalah bahasa standart, artinya suatu program yang ditulis dengan versi bahasa C tertentu dapat dikompilasi dengan versi bahasa C yang lain dengan sedikit modifikasi. Perancangan Program Pada Mikrokontroler meliputi perancangan program utama dan perancangan pengendalian beban.
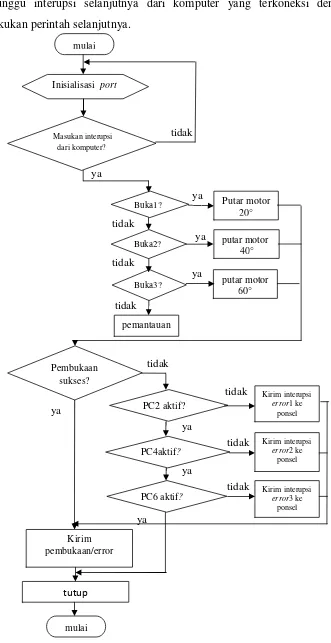
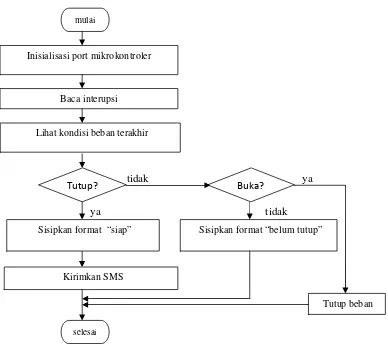
3.6.1.1 Perancangan Pengendalian Beban
Pada perancangan pengendali beban program diawali dengan mulai. Kemudian mikrokontroler akan melakukan inisialisasi terhadap port mikrokontroler dan dilanjutkan dengan pendeteksian input data dari ponsel pengguna yang tersimpan sementara di komputer.
Input dari komputer berupa varibel-variabel. Setelah mendapat input data berupa interupsi (pesan) dari komputer, mikrokontroler akan melihat kondisi dari beban (motor servo) terakhir. Interupsi yang dapat dijalankan mikrokontroler antara lain memantau kondisi terakhir dari motor servo dan melakukan pengendalian terhadap motor servo. Proses melihat kondisi terakhir dilakukan dengan melihat kondisi terakhir dari sistem dengan melihat kondisi port(PortC.0). Proses pengendalian yang dilakukan oleh mikrokontroler adalah mengaktifkan motor servo sesuai dengan pembukaan yang diinginkan dan tidak mengaktifkan motor servo (menutup beban).
kondisi status tidak aktif, maka mikrokontroler akan mengirim interupsi ke komputer bahwa beban dalam kondisi terbuka dan secara otomatis menutup beban. Mikrokontroler akan menunggu interupsi selanjutnya dari komputer yang terkoneksi dengan ponsel untuk melakukan perintah selanjutnya.
mulai
Inisialisasi port
Buka1? ya
tidak
Putar motor 20°
Buka2? putar motor
40°
Buka3? putar motor
60°
tidak
tidak
ya
ya
Gambar 3.7.Flowchart Pengendalian Beban Pembukaan sukses? ya ya PC2 aktif? tidak tidak tidak tidak PC4aktif?
PC6 aktif? Kirim interupsi error3 ke ponsel Kirim interupsi
error2 ke ponsel Kirim interupsi
Proses selanjutnya mikrokontroler akan melakukan eksekusi perintah dari komputer. interupsi tersebut berisi eksekusi untuk pembukaan sistem dalam hal ini perngkat fish feeder.
Interupsi bk1 berarti putar motor servo 20° dengan waktu berputar 2 mS, bk2 berarti putar motor servo 40° dengan waktu berputar 2 mS, dan bk3 berarti putar motor servo 60° dengan waktu berputar 2 mS. interupsi bk1 juga berhubungan dengan kodisi switch1, begitu juga dengan bk2, dan bk3. Setelah eksekusi berakhir, maka mikrokontroler akan memberikan interupsi ke komputer berupa variabel-variabel yang menunjukkan bahwa pembukaan berhasil.
Bila terjadi error pada saat melakukan pembukaan, maka mikrokontroler juga akan memberi informasi bahwa terjadi kesalahan pengendalian. Terjadinya error dideteksi dengan melihat kondisi switch yang terjadi. Misalnya error terjadi saat diberi interupsi bk2 dan terjadinya error karena gear motor terganjal sesuatu sehinga motor tidak berputar. Motor berputar dari bk1 sampai bk2 melalui switch1(Port C.0 )dan switch2 (Port C.0). Pada saat bk1 Port C.0 aktif dan ketika menuju Port C.0 terjadi kesalahan, motor tidak berputar sehingga tidak mengaktifkan Port C.0 Proses selanjutnya yang dilakukan mirokontroler adalah memberi interupsi kekomputer bahwa pembukaan error1 dan mengembalikan keadaan beban pada kondisi semula yaitu menutup beban (sudut putar motor servo 0°). Interupsi ke ponsel tersebut adalah error2. Mikrokontroler akan menunggu interupsi selanjutnya. Flowchart Perancangan pengendalian beban tersebut ditunjukkan pada Gambar 3.7.
3.6.1.2 Subroutine Pemantauan Mikrokontroler
Gambar 3.8. FlowchartSubroutine Pemantauan Mikrokontroler
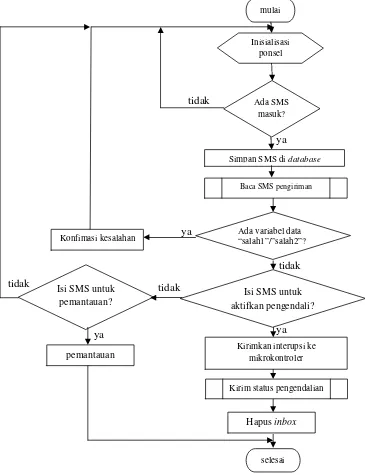
3.6.2 Perancangan Program pada Komputer
Perancangan program pada komputer dimaksudkan untuk komunikasi antara ponsel, komputer dan mikrokontroler. Program pada komputerberfungsi untuk memberikan interupsi ke mikrokontroler, mengakusisi data kondisi beban terakhir dan menampilkan kondisi beban terakhir ke komputer lalu ke ponsel pengguna. Flowchart dari komputer ditunjukkan pada Gambar 3.9. Pada awal program komputer melakukan inisialisasi terhadap ponsel pengguna dan pendeteksian data input yang berupa SMS pada ponsel. Jika terdapat input SMS, maka komputer akan melakukan identifikasi atau membandingkan nomor pengirim dan isi SMS. Proses identifikasi nomor pengirim dan pengambilan isi SMS akan dilakukan di dalam
subroutine SMS Pengiriman.
Setelah proses yang terjadi pada subroutine SMS pengiriman selesai, komputer akan memberikan interupsi secara otomatis untuk menghapus SMS pada inbox (kotak pesan) ponsel. Penghapusan ini dimaksudkan untuk mencegah agar inbox ponsel tidak penuh, karena
inbox yang penuh dapat menyebabkan gangguan pada saat penerimaan SMS. Isi SMS yang mulai
Inisialisasi port mikrokontroler
Sisipkan format “belum tutup” Lihat kondisi beban terakhir
Kirimkan SMS
Tutup beban
selesai
tidak
Baca interupsi
Tutup? Buka?
Sisipkan format “siap”
ya k
sesuai dengan database komputer digunakan untuk menentukan interupsi selanjutnya yang akan diberikan kepada mikrokontroler. Bila nomor pengirim dan isi SMS yang tidak sesuai, maka proses selanjutnya dilakukan dalam subroutine konfirmasi kesalahan.
Gambar 3.9. Flowchart Program pada Komputer
Saat diberikan interupsi pemantauan, komputer akan mengirimkan interupsi kepada mikrokontroler. komputer akan memberikan konfirmasi secara otomatis kepada ponsel pada pengguna setelah beban aktif. Proses konfirmasi ini akan dilakukan di dalam subroutine
pemantauan. Setelah itu, komputer akan mengambil data terakhir beban dan menampilkannya mulai
Inisialisasi ponsel
Ada SMS masuk?
Simpan SMS di database
Ada variabel data “salah1”/”salah2”?
Isi SMS untuk aktifkan pengendali?
Kirimkan interupsi ke mikrokontroler
ya tidak
tidak ya
Konfimasi kesalahan
ya
Isi SMS untuk pemantauan?
tidak
pemantauan
ya tidak
Kirim status pengendalian Baca SMS pengiriman
pada layar komputer. Proses mengambil dan menampilkan kondisi terakhir beban akan terus berlangsung sampai terdapat instruksi untuk menghentikan pengendalian.
3.6.2.1 Subroutine SMS Pengiriman
Subroutine SMS pengiriman berfungsi untuk membandingkan data-data dari SMS yang dikirimkan dengan database. Data yang diambil berupa nomor pengirim dan isi SMS. Data-data ini akan disimpan sementara di dalam komputer. Gambar 3.10 menunjukkan diagram alir dari subroutine SMS pengiriman.
Gambar 3.10. Flowchart Subroutine SMS Pengiriman
Data nomor pengirim dan isi SMS yang diterima akan dibandingkan dengan database
pada komputer. Perbandingan ini dimaksudkan untuk menentukan interupsi yang akan mulai
Inisialisasi input
SMS dari ponsel
Nomor pengirim sudah sesuai
database?
Isi SMS sudah sesui database? Ambil dan simpan sementara
nomor dan isi SMS
selesai
Simpan sebagai variabel data “salah 1”/”salah2”
tidak tidak
ya ya
dijalankan selanjutnya oleh komputer. Jika nomor dan isi SMS sudah sesuai, maka isi SMS dapat diproses sebagai masukan mikrokontroler. Data nomor pengirim digunakan untuk identifikasi nomor pengirim. Selain itu, data nomor pengirim tersebut akan digunakan sebagai destination address (nomor tujuan) untuk mengirimkan konfirmasi SMS pada ponsel di sisi pengguna pada saat nomor
![Gambar 2.1. Elemen Jaringan GSM [4]](https://thumb-ap.123doks.com/thumbv2/123dok/1679364.2076375/24.595.187.422.123.339/gambar-elemen-jaringan-gsm.webp)
![Gambar 2.4 Konektor RS-232(DB9) [7]](https://thumb-ap.123doks.com/thumbv2/123dok/1679364.2076375/30.595.224.383.602.726/gambar-konektor-rs-db.webp)
![Gambar 2.5. Kaki DTR [7]](https://thumb-ap.123doks.com/thumbv2/123dok/1679364.2076375/31.595.102.502.88.336/gambar-kaki-dtr.webp)