5 BAB II
TINJAUAN PUSTAKA
2.1 Pengertian Dasar Robot dan Sistem Robotika 2.1.1 Definisi Robot
Kata robot berasal dari bahasa Czech, robota yang berarti pekerja, mulai menjadi populer ketika seorang penulis berbangsa Czech (Ceko), Karl Capek, membuat pertunjukan dari lakon komedi yang ditulisnya pada tahun 1921 yang berjudul RUR (Rossum’s Universal Robot). (Pitowarno, 2006: 1)
Robot dapat diartikan sebagai sebuah mesin yang dapat bekerja secara terus menerus baik secara otomatis maupun terkendali. Robot yang digunakan untuk membantu tugas-tugas manusia mengerjakan hal yang sulit atau dilakukan manusia secara langsung. Misalnya menangani material radio aktif, merakit mobil dalam industri perakitan mobil, menjelajah planet mars, sebagai media pertahanan atau perang, dan sebagainya. Pada dasarnya dilihat dari struktur dan fungsi fisiknya (pendekatan visual) robot teridiri dari dua bagian, yaitu non-mobile robot dan mobile robot. Kombinasi keduanya menghasilkan kelompok konvensional (mobile dan non-mobile) contohnya mobile manipulator, walking robot, dll dan non konvensional (humanoid, animaloid, extraordinary). Saat ini
robot selain untuk membantu pekerjaan manusia juga digunakan sebagai hiburan.
2.1.2 Robot Pengikut Garis (Line Follower / Line Tracer Robot)
Line follower atau Line tracer robot adalah robot yang bisa bergerak mengikuti jalur panduan garis. Garis pandu yang di gunakan dalam hal ini adalah garis putih yang di tempatkan pada permukaan berwarna gelap, atupun sebaliknya, garis hitam yang ditempatkan pada permukaan berwarna putih. (Riwaldi, Jurnal Gunadarma, Vol 2: 2005)
Ada dua macam robot line follower yaitu line follower biasa tanpa menggunakan program dan line follower dengan program mikrokontroler. hanya saja yang menggunakan program mikrokontroler lebih komplek dan lebih sempurna jika di banding line follower yang tanpa menggunakan program. Pembahasan perbedaan line follower yang menggunakan progran dengan tanpa menggunakan program.
Gambar 2.1 Contoh Robot Line Follower Dengan Mikrokontroler
2.2 Mikrokontroler
Mikrokontroler adalah suatu mikroprosesor plus. Mikrokontroler adalah otak dari susatu sistem elektronika seperti halnya mikroprosesor sebagai otak komputer. Nilai plus bagi mikrokontroler adalah terdapatnya memori dan port input dan output dalam suatu kemasan IC yang kompak. Kemampuannya yang programmable, fitur yang lengkap (ADC internal, EEPROM internal, port I/O, komunikasi serial, dll.), dan juga harga yang terjangkau memungkinkan mikrokontroler digunakan di berbagai sistem elektronis, seperti pada robot, automasi industri, sistem alarm, peralatan telekomunikasi, hingga perlatan rumah tangga. (Wardhana, 2006: 190)
2.2.1 Mikrokontroler ATMega8535
dengan MCS51 yang membutuhkan 12 siklus clock. Tentu saja itu terjadi karena kedua jenis mikrokontroler tersebut memiliki arsitektur yang berbeda. AVR berteknologi RISC (Reduced Instruction Set Computing), sedangkan seri MCS51 berteknologi CISC (Complex Instruction Set Computing). Secara umum, AVR dapat dikelompokan menjadi 4 kelas, yaitu keluarga ATTiny, AT90Sxx, ATMega dan AT86RFxx. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan hampir sama. (Wardhana. 2006: 1). Berikut ini Gambar Mikrokontroler ATMega8535
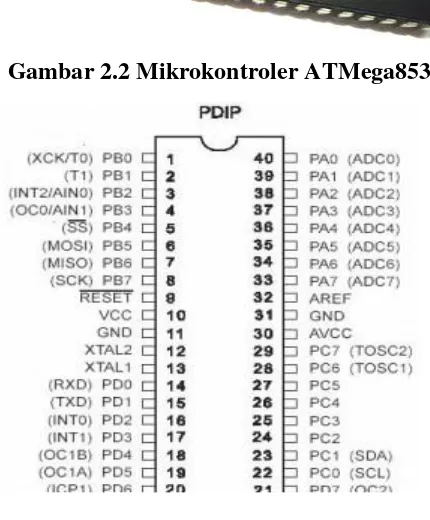
Gambar 2.2 Mikrokontroler ATMega8535
Gambar 2.3 Konfigurasi Pin ATMega8533
Secara umum konfigurasi dan fungsi pin ATMega8535 dapat dijelaskan sebagai berikut :
1. VCC Input sumber tegangan (+) 2. GND Ground (-)
4. Port B (PB7 … PB0) Berfungsi sebagai port I/O dua arah. Port PB5, PB6 dan PB7 juga berfungsi sebagai MOSI, MISO dan SCK yang dipergunakan pada proses downloading. Fungsi lain port ini selengkapnya bisa dibaca pada buku petunjuk ”AVR ATMega8535”.
5. Port C (PC7 … PC0) Berfungsi sebagai port I/O dua arah. Fungsi lain port ini selengk apnya bisa dibaca pada buku petunjuk ”AVR ATMega8535”. 6. Port D (PD7 … PD0) Berfungsi sebagai port I/O dua arah. Port PD0 dan
PD1 juga berfungsi sebagai RXD dan TXD, yang dipergunakan untuk komunikasi serial. Fungsi lain port ini selengkapnya bisa dibaca pada buku petunjuk ”AVR ATMega8535”.
7. RESET Input reset.
8. XTAL1 Input ke amplifier inverting osilator dan input ke sirkuit clock internal.
9. XTAL2 Output dari amplifier inverting osilator. 10.AVCC Input tegangan untuk Port A dan ADC. 11.AREF Tegangan referensi untuk ADC.
Adapun kapabilitas detail dari ATmega8535 adalah sebagai berikut :
1. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz.
2. Kapabilitas memori flash 8 KB, SRAM sebesar 512 byte, dan EEPROM (Electrically Erasable Programmable Read Only Memori) sebesar 512 byte.
3. ADC internal dengan fidelitas 10 bit sebanyak 8 channel.
4. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps. 5. Enam pilihan mode sleep untuk menghemat penggunaan daya listrik. Dari gambar blok diagram tersebut dapat dilihat bahwa ATMega8535 memiliki bagian-bagian sebagai berikut :
1. Saluran I/O sebanyak 32 buah, yaitu Port A,Port B,Port C dan Port D. 2. ADC 8 channel 10 bit.
5. Watchdog timer dengan osilator internal. 6. SRAM sebesar 512 byte.
7. Memori Flash sebesar 8 KB dengan kemampuan Read While Write.Interrupt internal dan eksternal
8. Port antarmuka SPI (Serial Peripheral Interface).
9. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 10.Antarmuka komparator analog.
11.Port USART untuk komunikasi serial
Gambr 2.4 Blok Diagram Fungsional ATMega8535
2.3 Sensor
2.3.1 Sensor Garis
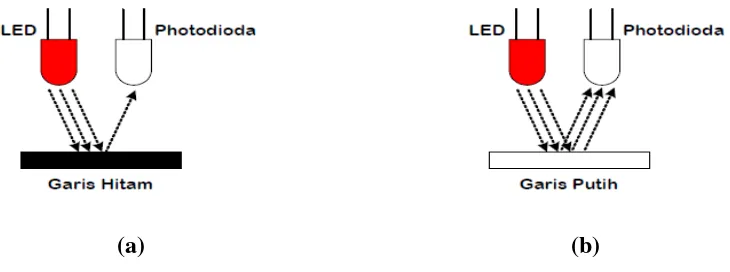
Sensor garis adalah jenis sensor yang berfungsi menedeteksi warna garis umumnya yang sering digunakan yaitu hitam dan putih. Rangkaian sensor garis ini umumnya terdiri dari dua komponen pembentuk utama yaitu sensor photodioda dan LED. (Irawan, 25: 2012).
Prinsip kerja dari rangkaian sensor garis ini cukup sederhana yaitu apabila photodioda yang merupakan sensor yang berfungsi untuk menerima pantulan cahaya berasal dari LED, pada saat photodioda tersebut menerima banyak cahaya maka tegangan keluar yang akan dihasilkan oleh photodioda tersebut akan mendekati 0 volt, yang biasanya di definisikan dengan logika „0‟ atau „low’. Pada kondisi seperti ini biasanya sensor garis tersebut diatas warna garis terang (umumnya warna garis terang yang sering digunakan adalah warna putih).
Sebaliknya jika photodioda tidak banyak menerima berkas cahaya yang berasal dari LED maka tegangan keluaran dari pada photodioda akan sama
dengan VCC. Pada kondisi ini akan didefinisikan sebagai logika „1‟ atau „high‟.
Kondisi seperti terjadi pada saat sensor garis tersebut berada diatas warna garis yang gelap (umumnya warna garis gelap yang sering digunakan adalah warna hitam).Berikut adalah ilustrasinya :
(a) (b)
Gambar 2.5 (a) Cahaya Pantulan Sedikit (b) Cahaya Pantulan Banyak
2.4 Sensor Ultrasonik PING
2.4.1 Pengertian Sensor Ultrasonik PING
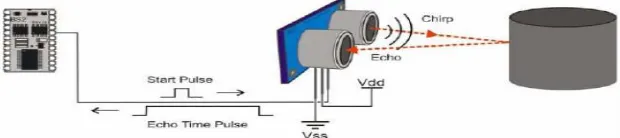
Sensor ultrasonik PING adalah sensor 40 KHz produksi parallax yang banyak digunakan untuk aplikasi atau kontes robot cerdas untuk mendeteksi jarak suatu objek. (Suryono, 2010 : 14)
Gambar 2.6 Bentuk Fisik Sensor ultrasonik PING
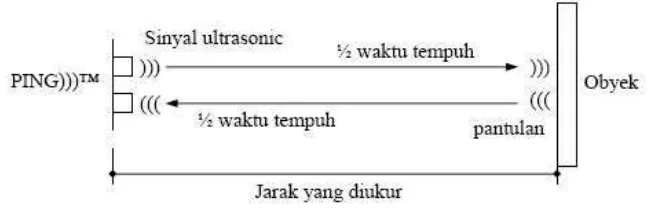
Sensor PING mendeteksi jarak objek dengan cara memancarkan gelombang ultrasonik ( 40 KHz ) selama t = 200 us kemudian mendeteksi pantulannya. Sensor PING memancarkan gelombang ultrasonik sesuai dengan kontrol dari mikrokontrollerpengendali ( pulsa trigger dengan t out min 2 us ). Spesifikasi sensor ini :
a. Kisaran pengukuran 3cm-3m.
b. Input trigger –positive TTL pulse, 2uS min., 5uS tipikal. c. Echo hold off 750uS dari fall of trigger pulse.
d. Delay before next measurement 200uS.
e. Burst indicator LED menampilkan aktifitas sensor. 2.4.2 Prinsip Kerja Sensor Ultrasonik
Pada dasanya, Sensor Ultrasonik terdiri dari sebuah chip pembangkit sinyal 40KHz, sebuah speaker ultrasonik dan sebuah mikropon ultrasonik. Speaker ultrasonik mengubah sinyal 40 KHz menjadi suara sementara mikropon
Gambar 2.7 Prinsip kerja sensor ultrasonik
2. 5 Speaker
Speaker adalah komponen elektronika yang sering di jumpai, speaker
mempunyai nilai impedansi dengan satuan ohm. Nilai ini menunjukan nilai hambatan dalam spul didalam speaker. Sebuah speaker memiliki susunan antara lain sebuah spul yang menggerakan membran sebagai penghasil suara, ditengah gulungan spul ini terdapat sebuah batangan magnet yang jika spul menerima signal suara spul tersebut akan menghasilkan medan magnet dan akan saling bereaksi dengan batangan magnet, sehingga menghasilkan getaran pada membran yang kemudian menghasilkan suara dari getaran membran ini. (Falah. Jurnal Gunadarma, Vol 12 : 2005).
Membran pada speaker bergetar akibat induksi elektromagnetik yang dihasilkan sebuah magnet dan kumparan karena dialiri arus listrik. Getaran suara yang dihasilkan speaker akan seiring dengan sinyal elektrik yang diberikan pada kumparan yang ada di dalamnya. Prinsip kerja speaker ini kebalikan dari prinsip kerja microphone yang mengubah gelombang suara menjadi gelombang listrik.
Berdasarkan Frekuensi yang dihasilkan speaker dibagi menjadi 3 jenis: 1. Speaker Woofer: speaker yang dominan untuk menghasilkan suara rendah 2. Speaker Midrange: speaker yang dominan hanya mengahsili suara dengan
frekuensi menengah
3. Speaker Tweeter: speaker yang dominan menghasilkan suara dengan frekuensi tinggi
sedangkan untuk sistem crossover dibagi menjadi 2 jenis:
1. speaker sistem loudspeaker 2 way : didalamnya ditemukan woofer dan tweeter
2. speaker sistem loudspeaker 3 way : didalamnya ditemukan woofer, midrange, dan tweeter
Gambar 2.8 Digram Blok Sistem Kerja Speaker
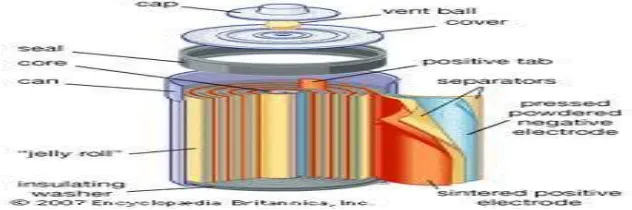
2.6 Baterai
Baterai sebagai sumber arus listrik searah (DC) dapat dikelompokkan menjadi dua macam, yaitu baterai elemen kering dan elemen basah. Baterai dapat disebut juga dengan istilah accu atau accumulator yang berarti menghimpun.
Baterai adalah suatu peralatan yang dapat menghasilkan energy listrik dengan melalui proses kimia. Baterai mempunyai 2 elektroda yaitu elektroda positif dan elektroda negatif. Suatu beban apabila terhubung dengan elektroda-elektroda baterai, maka akan timbul reaksi elektro kimia dan terjadilah aliran arus listrik dari kutub positif menuju negatif.
2.7 Motor DC Servo
Motor DC servo (DC-SV) pada dasarnya adalah motor DC-MP dengan
kualifikasi khusus yang sesuai dengan aplikasi “servoing” di dalam teknik
kontrol. Dalam kamus Oxford istilah “servo” diartikan sebagai “a mechanism that control a large mechanism”.
Tidak ada spesifikasi baku yang disepakati untuk menyatakan bahwa suatu motor DC-MP adalah motor DC-SP. Namun secara umum dapat didefinisikan bahwa motor DC-MP harus memiliki kemampuan yang baik dalam mengatasi perubahan yang (sangat) cepat dalam posisi, beroperasi dalam lingkup torsi yang berubah-ubah.
Beberapa tipe motor DC-SP yang dijual bersama dengan paket rangkaian drivernya telah memiliki rangkaian kontrol kecepatan yang menyatu didalamnya. Putaran motor tidk lagi berdasarkan tegangan supply ke motor, namun berdasarkan tegangan input khusus yang berfungsi sebagai referensi kecepatan output. (Pitowarno: 2006)
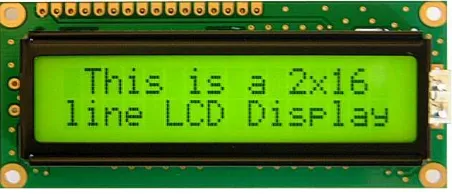
2.8 LCD (Liquid Crystal Display)
LCD (Liquid Crystal Display) adalah suatu jenis media tampilan yang menggunakan kristal cair sebagai penampil utama, selain itu LCD juga dapat digunakan untuk menampilkan karakter ataupun gambar. (Munandar. 2013: 26). 2.8.1 LCD 16X2
LCD M1632 yang terdiri dari 2 baris, 16 kolom dimulai dari baris 1 paling atas dan kolom 0 paling kiri.
Sebelum menampilkan karakter pada LCD, maka harus mengikuti prosedur sebagai berikut :
1. Inisialisasi
2. Pemesanan tempat 3. Penulisan data 4. Display Clear
0 0 0 0 0 0 0 0 0 1
RS R/-W D7 D6 D5 D4 D3 D2 D1 D0
Instruksi ini akan menghapus semua display dan mengembalikan kursor ke posisi awal ( alamat 0 )
5. Cursor Home
0 0 0 0 0 0 0 0 1 X
RS R/-W D7 D6 D5 D4 D3 D2 D1 D0
Instruksi ini mengembalikan kursor ke posisi awal ( alamat 0 ) Entry Mode Set
0 0 0 0 0 0 0 1 I/D XS
RS R/-W D7 D6 D5 D4 D3 D2 D1 D0
Instruksi ini mengatur arah pergerakan kursor dan apakah display akan digeser. a. Jika I/D = 1 alamat akan dinaikan dan kursor bergerak ke kanan dan Jika
I/D =
b. 0 alamat akan diturunkan dan kursor bergerak ke kiri.
c. Jika S = 1, semua display akan digeser, tetapi posisi kursor tidak berubah. d. Jika S = 1 dan I/D = 1, display akan digeser ke kiri dan jika S = 1 dan I/D
= 0
e. display akan digeser ke kanan.
f. Jika S = 0, display tidak akan digeser. 6. Display ON/OFF Control
0 0 0 0 0 0 1 D C B
RS R/-W D7 D6 D5 D4 D3 D2 D1 D0 a. D = 1, display akan ditampilkan
d. C = 0, kursor tidak ditampilkan
e. B = 1, karakter tempat posisi kursor berkedip f. B = 0, karakter tempat posisi kursor tidak berkedip 7. Cursor/Display Shift
0 0 0 0 0 0 S/C R/L * *
RS R/-W D7 D6 D5 D4 D3 D2 D1 D0
Instruksi ini akan menggerakkan kursor dan menggeser display tanpa mengubah RAM
S/C R/L Operasi
0 0 Posisi kursor digeser ke kiri 0 1 Posisi kursor digeser ke kanan
1 0 Seluruh display digeser ke kiri dengan kursornya 1 1 Seluruh display digeser ke kanan dengan kursornya
8. Function Set
0 0 0 0 0 DL 1 * * *
RS R/-W D7 D6 D5 D4 D3 D2 D1 D0 a. DL = 1, panjang data diatur 8 bit
b. DL = 0, panjang data 4 bit ( D7 - D4 ) Pin dari LCD tipe ini terdiri dari 16 pin
No Nama Fungsi
1 Vss GND
2 Vc‟c + 5 V
3 Vee LCD Contrast
4 RS 1 = Input data, 0 = Input instruksi 5 R/W 1 = Read, 0 = Write
6 E Enabled
7 D0 Data 0
8 D1 Data 1
9 D2 Data 2
10 D3 Data 3
11 D4 Data 4
12 D5 Data 5
13 D6 Data 6
14 D7 Data 7
9. Pemesanan tempat
Kebaris dan kolom dengan memberi RS = 0. Untuk baris 1 data yang dikirim adalah 8XH atau 1000xxxxB dan baris 2 data yang dikirim adalah CXH atau 1100xxxxB dimana x menunjukan kolom 0 – 15 ( 0H - FH ).
10.Penulisan karakter
Ke baris dan kolom tersebut dengan memberi RS = 1. Karakter yang dikirim dalam format ASCII.
2.9 IC Regulator 7805
IC regulator 7805 adalah IC regulator tegangan positif 5 Volt di mana pada IC regulator ini hanya terdapat 3 kaki, yaitu kaki tegangan masukan yang biasa sering disebut Vin, kaki ground dan kaki ketiga adalah kaki tegangan keluaran atau Vout. IC regulator 7805 ini mengeluarkan tegangan +5 Volt pada arus maksimum 1 Ampere dengan tegangan input berkisar antara 7-25 Volt. (Surjati, TESLA, Vol. 10: 2008)
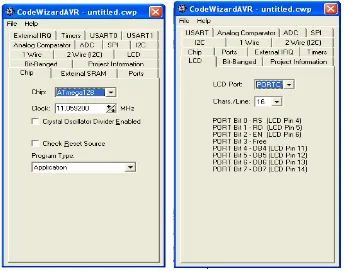
Gambar 2.11 IC Regulator LM 7805 2.10 Code VisionAVR
Ada beberapa program yang dapat digunakan sebagai editor dan compiler untuk mikrokontroler AVR salah satunya yaitu CodeVision. CodeVisionAVR merupakan salah satu alat bantu pemrograman (programming tool) yang bekerja dalam lingkungan pengembangan perangkat lunak yang terintegrasi (Integrated Development Environment, IDE). Program ini menggunakan bahasa C sebagai
bahasa pemrogramannya. Dalam Laporan Akhir ini, bahasa pemrograman yang digunakan adalah bahasa C.
CodeVisionAVR menyediakan suatu fasilitas yang bernama Code Wizard
AVR, dimana fasilitas ini mempermudah dalam pemilihan jenis mikrokontroler,
serta pengaktifan fasilitas-fasilitas dari mikrokontroler seperti timer, LCD, input/output, external IRQ, dan lain-lainnya. Gambar 2.8. menunjukkan fasilitas
Gambar 2.12 Fasilitas Code VisionAVR
2.11 Bagan Alir Program (Flowchart)
Flowchart adalah cara penyajian visual aliran data melalui sistem informasi,
Flowchart dapat membantu menjelaskan pekerjaan yang saat ini dilakukan dan
bagaimana cara meningkatkan atau mengembangkan perkerjaan tersebut. Dengan menggunakan flowchart dapat juga membantu untuk menemukan elemen inti dari sebuah proses, selama garis digambarkan secara jelas antara di mana suatu proses berakhir dan proses selanjutnya dimulai. Adapun simbol-simbol dari flowchart adalah sebagai berikut : (Sistem Informasi, Vol.7: 2012)
No. Simbol Keterangan
1. Flow Lines Garis ini menunjukka arah selanjutnya yang akan dituju.
2. Terminal (mulai atau berhenti) Simbol ini digunakan untuk menunjukkan awal kegiatan atau akhir kegiatan atau berhenti dari suatu program.
3. Input atau Output Untuk mewakili data input dan untuk menuliskan output.
4. Proses (Pengolahan) Suatu Simbol yang melambangkan diprosesnya suatu alat.
5. Predefined Untuk Program-program yang
dipergunakan dalam sebuah program berulang kali, biasanya program dibuat terpisah dengan sebuah sub program (subroutine), untuk menghubungkan program utama dengan subroutine dipergunakan simbol ini.
6. Decision (Keputusan) Menunjukkan suatu perbandingan yang harus dibuat bila hasilnya “ya”, maka alir data akan menunjukkan ke suatu tempat, bila “tidak” maka akan menuju ke tempat lain.
7. Connector (Penghubung) Simbol untuk keluar atau masuk procedure atau proses dalam lebar