BAB II
TINJAUAN PUSTAKA
2.1 Analisa Getaran
Perawatan mesin tradisional, skedul overhaul perbaikan biasanya sulit dibuat karena kebutuhan perbaikan tidak dapat ditentukan secara pasti, tanpa membongkar mesin yang bersangkutan. Bila untuk mendeteksinya kasus permasalahan harus sudah cukup serius, kemungkinan besar kerusakan sudah terjadi dan merambat ke peralatan lain, ataupun peralatan mesin yang bekerja baik yang diperbaiki, sebaliknya peralatan yang akan mengalami kerusakan tidak disentuh, sehingga biaya perbaikan meningkat.
Teknologi modern memungkinkan cara untuk mendeteksi awal gejala kerusakan mekanik maupun elektrikal pada peralatan mesin dari luar, yang paling efektif dari berbagai cara yang mungkin adalah analisa getaran, sehingga analisa getaran menjadi pilihan teknologi predictive maintenance yang paling sering digunakan saat ini (Scheffer, 2004).
Nilai batasan getaran yang diperbolehkan dapat distandarkan (standar pabrik) sehingga apabila nilai getaran yang terjadi diluar batasan yang diizinkan maka peralatan tersebut harus menjalani tindakan perawatan.
Tiga sifat fundamental yang berhubungan pada reaksi getaran yang timbul diakibatan oleh adanya transfer gaya siklik melalui elemen-elemen mesin yang ada, dimana elemen-elemen tersebut saling beraksi satu sama lain dan energi disipasi melalui struktur dalam bentuk getaran seperti pada sistem pegas-massa (Scheffer, 2004), fundamental tersebut yaitu:
1) Massa (m):
Merupakan inersia untuk mempertahankan keadaan semula atau bergerak dari gaya-gaya yang bekerja, satuannya dalam kg; lb 2) Kekakuan/stiffness (k):
Kemampuan untuk mempertahankan dari gaya yang dipersyaratkan bekerja untuk membengkokan (defleksi) struktur yang dengan jarak tertentu, satuannya dalam N / m; lb/in
Mekanisme inheren untuk memperlambat gerakan (kecepatan), satuannya dalam N /(m/s); lb.sec/in
Efek ketiga fundamental tersebut massa, kekakuan, redaman menentukan bagaimana suatu sistem akan merespon energi getaran yang bekerja. Kerusakan atau keausan akibat umur pemakaian peralatan dan deformasi akan mengubah karakteristik dinamik sistem dan cenderung meningkatkan energi getaran. Adanya perubahan ini dideteksi untuk dianalisa.
2.1.1. Karakteristik Getaran
Getaran secara teknik didefenisikan sebagai gerak osilasi dari suatu objek terhadap posisi objek awal/diam. Kondisi getaran suatu mesin dan masalah-masalah mekanik yang terjadi dapat diketahui dengan mengukur karakteristik getaran yang timbul. Karakteristik utama getaran yaitu:
1) Frekuensi merupakan karakteristik dasar pengukuran dan menggambarkan jumlah gerak osilasi tiap detik.
2) Perpindahan mengindikasikan berapa jauh suatu objek bergetar 3) Kecepatan mengindikasikan berapa cepat objek bergetar
4) Percepatan mengindikasikan suatu objek bergetar terkait dengan gaya penyebab getaran
5) Phase mengindikasikan bagaimana suatu bagian bergetar relatif terhadap bagian yang lain, atau untuk menentukan posisi suatu bagian yang bergetar pada suatu saat, terhadap suatu referensi atau terhadap bagian lain yang bergetar dengan frekuensi yang sama.
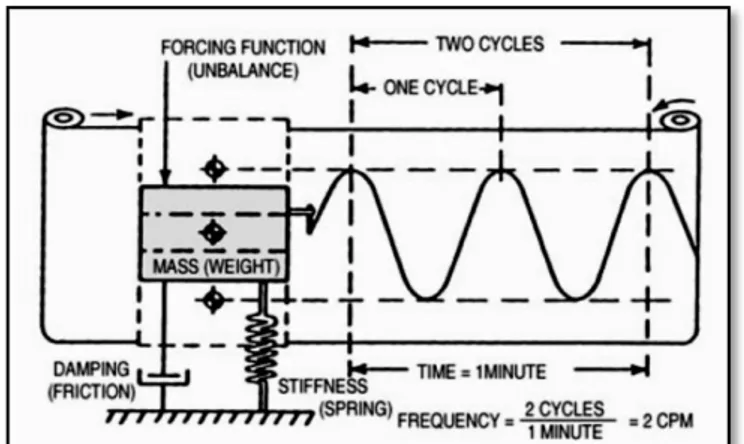
Dengan mengacu pada gerakan pegas, kita dapat mempelajari karakteristik suatu getaran dengan memetakan gerakan dari pegas tersebut terhadap fungsi waktu. Gerakan bandul pegas dari posisi netral ke batas atas dan kembali lagi ke posisi netral dan dilanjutkan ke batas bawah, dan kembali lagi ke posisi netral, disebut satu siklus getaran (satu periode). Setiap karakteristik ini menggambarkan tingkat getaran, hubungan karakteristik ini dapat dilihat pada Gambar 2.1, 2.2 dan 2.3. dan untuk Satuan yang digunakan Tiap Karakteristik dapat di lihat pada Tabel 2.1.
Gambar 2.1. Sistem Getaran Sederhana (Mobley, 2008)
.
Gambar 2.2. Hubungan Antara Perpindahan, Kecepatan dan Percepatan Getaran (Mobley, 2008)
Panjang gelombang adalah sebuah jarak antara satuan berulang dari sebuah pola gelombang. Biasanya memiliki denotasi huruf Yunani lambda (λ). Dalam sebuah gelombang sinus, panjang gelombang adalah jarak antara puncak.
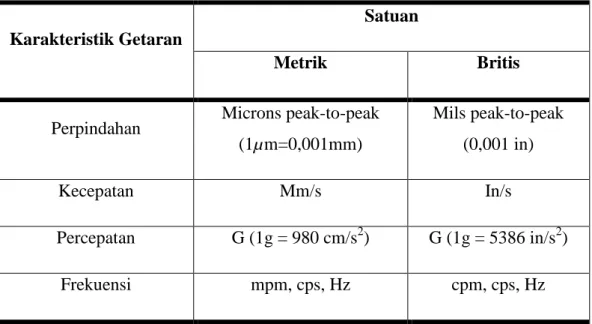
Amplitudo adalah pengukuran skalar yang nonnegatif dari besar suatu gelombang. Amplitudo juga dapat didefinisikan sebagai jarak/simpangan terjauh dari titik kesetimbangan dalam gelombang sinusoide yang kita pelajari pada mata pelajaran fisika dan matematika - geometrika. Amplitudo dalam sistem internasional biasa disimbolkan, dengan (A) dan memiliki satuan meter (m). Tabel 2.1 Karakteristik dan satuan getaran
(Sumber : Maintenance Engineering Handbook, Mobley, 2008)
2.1.2. Gerak Harmonik
Getaran dari sebuah mesin merupakan resultan dari sejumlah getaran individu komponen yang muncul. Setiap komponen individu yang bergetar memiliki gerak periodik. Gerakan akan berulang pada periode waktu pengulangan (τ) disebut perioda osilasi diukur dalam satuan detik dan kebalikannya adalah frekuensi (Scheffer, 2004) dengan rumusan:
1
f ... (2.1) Frekuensi lingkaran atau kecepatan sudut dapat dihitung dengan rumus:
Karakteristik Getaran
Satuan
Metrik Britis
Perpindahan Microns peak-to-peak (1µm=0,001mm) Mils peak-to-peak (0,001 in) Kecepatan Mm/s In/s Percepatan G (1g = 980 cm/s2) G (1g = 5386 in/s2) Frekuensi mpm, cps, Hz cpm, cps, Hz
f
2 1 2 ... (2.2) Kecepatan sudut (ω) biasanya diukur dalam radian per detik (rps). Bentuk sederhana dari gerak periodik adalah gerak harmonik, pada gerak harmonik, hubungan antara perpindahan maksimum dan waktu dinyatakan dengan:
t A
x sin
... (2.3)Kecepatan dalam gerak harmonik berdasarkan persamaan (2.3) dapat diperoleh dari hasil diferensial perpindahan terhadap waktu, yaitu:
t A x dt dx cos ... (2.4) Sedangkan percepatan harmonik diperoleh dari hasil diferensial kecepatan terhadap waktu: t A x dt d 2 sin 2 2 ... (2.5) Amplitudo melekat pada ketiga besaran perpindahan, kecepatan, dan percepatan.
2.1.3. Gerak Periodik
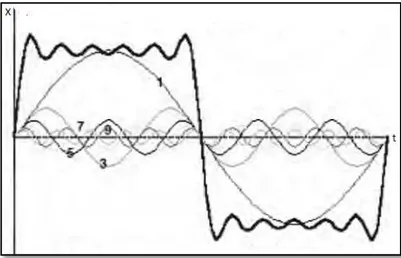
Pada umumnya getaran mesin memiliki beberapa frekuensi yang berbeda muncul bersama-sama. Getaran yang berulang atau osilasi dalam selang waktu yang sama disebut gerak periodik. Gerak periodik dapat dihasilkan oleh getaran bebas, sistem dengan banyak derajat kebebasan menyumbangkan frekuensi natural berbeda. Getaran semacam ini menghasilkan bentuk gelombang kompleks yang diulang secara periodik seperti ditunjukkan pada Gambar 2.4. yang menunjukkan gerak periodik gelombang sinyal segiempat dan gelombang pembentukannya dalam domain waktu.
Gambar 2.4. Gerak periodik gelombang sinyal segiempat dan gelombang pembentukannya dalam domain waktu (Robert K. Vierck, 1995)
Hal-hal yang perlu kita perhatikan adalah sebagai berikut:
1. Gelombang pertama yang harus kita amati adalah gelombang (1). Hal ini diwakili oleh satu siklus. Sebagai skala waktu adalah 1 s, ia memiliki frekuensi 1 Hz.
2. Gelombang berikutnya untuk dipertimbangkan adalah gelombang (3). Hal ini dapat dilihat bahwa ia memiliki tiga siklus pada periode yang sama dari gelombang pertama. Jadi, ia memiliki frekuensi 3 Hz.
3. Ketiga adalah gelombang (5). Berikut lima siklus dapat ditelusuri, dan tentunya memiliki frekuensi dari 5 Hz.
4. Berikutnya adalah gelombang (7). Ia memiliki tujuh siklus dan karena itu frekuensi 7 Hz.
5. Gelombang (9) adalah berikutnya dengan sembilan siklus dan akan memiliki frekuensi 9 Hz.
Gerak harmonik pada Gambar 2.4. dinyatakan dalam deretan sinus dan cosinus yang dihubungkan secara harmonik. Jika x(t) adalah fungsi periodik dengan periode τ, maka fungsi ini dapat dinyatakan oleh deret Fourier (Pain, 2005) dengan rumus sebagai:
t a t a t a a t
x cos cos ... ncosn
2 1 )
t b
t b
t
b1sin1 2sin2 ... nsinn
... (2.6) Dimana: 1 : 2 n : 21
Pada gelombang segiempat berlaku x(t) = ±Apada t = 0, dan t = τ, dan seterusnya. Deret ini menunjukkan nilai rata-rata dari fungsi yang diskontinu.
2.1.4. Getaran Bebas (Free Vibration)
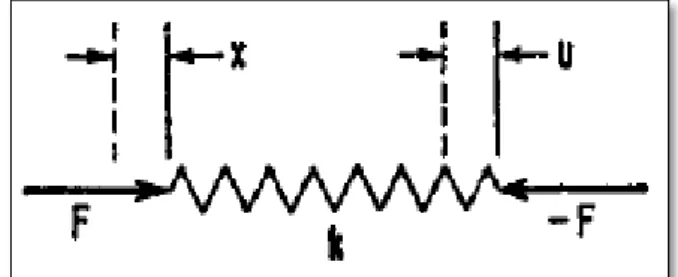
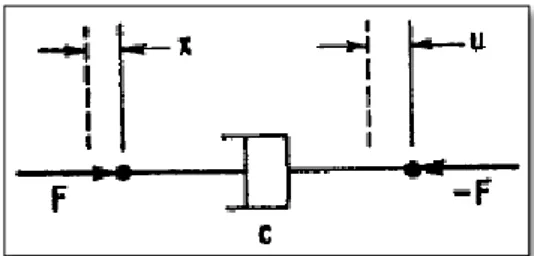
Dalam gerak translasi, perpindahan didefinisikan sebagai jarak linier. Sedangkan dalam gerak rotasi, perpindahan didefinisikan sebagai gerakan sudut (Harris dan Piersol, 2002). Bila pegas dianggap tidak memiliki massa, sehingga gaya yang bekerja pada salah satu ujungnya sama dan berlawanan dengan gaya yang bekerja pada ujung yang lain sehingga konstanta proporsional adalah konstan. Pegas Linier dapat di lihat pada Gambar 2.5.
Gambar 2.5 Pegas Linier (Harris dan Piersol, 2002).
Perubahan panjang proporsional dengan gaya yang bekerja sepanjang pegas adalah:
) (x u k
F ... (2.7) Koefisien redaman c yang ideal ditunjukkan pada Gambar 2.6. dianggap tidak memiliki massa, sehingga besarnya gaya pada kedua ujungnya sama namun arahnya berlawanan, sehingga besarnya gaya redam dapat dirumuskan sebagai berikut: ) (x u c F ... (2.8)
Gambar 2.6 Redaman c (Harris dan Piersol, 2002).
Gambar 2.7. menunjukkan getaran bebas tanpa redaman untuk benda tegar mempunyai massa dengan percepatan menurut hukum kedua Newton sebanding dengan resultan semua gaya yang bekerja pada benda tersebut, hal ini dapat dirumuskan sebagai berikut:
x m F
... (2.9)
Gambar 2.7 Benda Tegar (Harris dan Piersol, 2002)
Persamaan Newton untuk massa. Gaya mxyang diberikan oleh massa dan pegas massa yang berlawanan dengan gaya kx diterapkan oleh pegas pada massa, dirumuskan sebagai berikut:
0
kx x
m ... (2.10)
2.1.4.1. Free vibration tanpa redaman
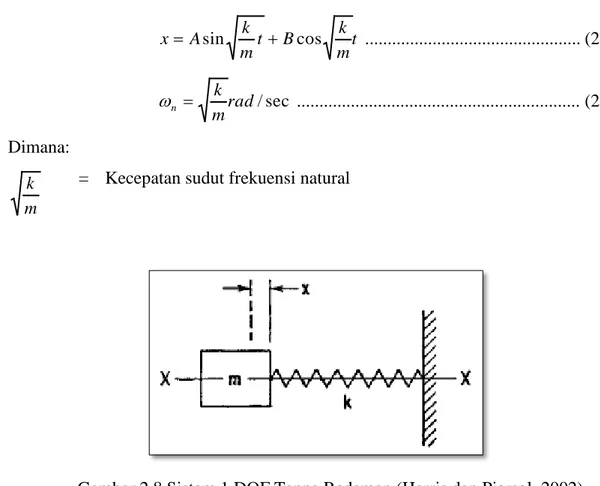
Sistem 1 DOF Tanpa Redaman dapat dapat di lihat pada Gambar 2.8. dimana x = 0 karena posisi kesetimbangan massa. Sehingga solusi untuk penyelesaian diatas adalah:
t m k B t m k A x sin cos ... (2.11) sec / rad m k n ... (2.12) Dimana: m
k = Kecepatan sudut frekuensi natural
Gambar 2.8 Sistem 1 DOF Tanpa Redaman (Harris dan Piersol, 2002).
Osilasi sinusoida massa berulang terus menerus, dan interval waktu untuk menyelesaikan satu siklus periode dapat dirumuskan:
n
2 ... (2.13) Dan kebalikan periode adalah frekuensi natural, dan dirumuskan sebagai berikut:
W kg m k f n n 2 1 2 1 2 1 ... (2.14)
2.1.4.2. Free vibration dengan redaman
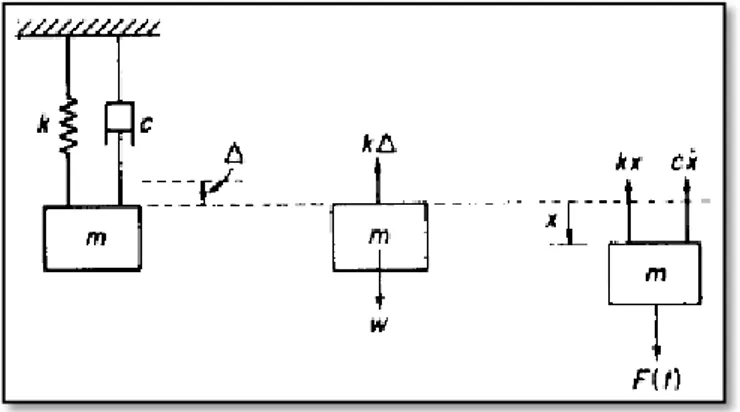
Getaran bebas (Free vibration) dengan redaman digambarkan seperti Gambar 2.9. yang menunjukkan Sistem Pegas Massa dan Diagram Benda Bebas.
Gambar 2.9. Sistem Pegas Massa dan Diagram Benda Bebas (William T. Thomson, 1992)
Hukum Newton kedua adalah dasar untuk meneliti gerak sistem untuk gerakan diterapkan pada massa m:
) ( x k w F x m ... (2.15) Perubahan bentuk pegas pada posisi kesetimbangan adalah Δ dan gaya pegas kΔ adalah sama dengan gaya gravitasi w yang bekerja pada massa m dan dirumuskan sebagai berikut:
mg w
k ... (2.16) dan karena kΔ = w, diperoleh:
kx x
m ... (2.17) frekuensi lingkaran , sehingga persamaan dapat ditulis:
0
2
x
x n
... (2.18) sehingga persamaan umum dari persamaan diferensial linier orde kedua yang homogen: 0 cos sin A t B t x n n ... (2.19) Perioda natural osilasi dibentuk dari ; atau
k m
2 ... (2.20) dan frekuensi natural adalah:
k m fn 2 1 1 ... (2.21)
Persamaan homogen untuk Gambar 2.9 adalah: 0 cx kx x m ... (2.22) Dan koefisien redaman kritis dirumuskan sebagai berikut:
n
c km m
C 2 2 ... (2.23) sehingga rasio redaman adalah:
c C C ... (2.24) Sehingga: n c m C m C 2 2 ... (2.25)
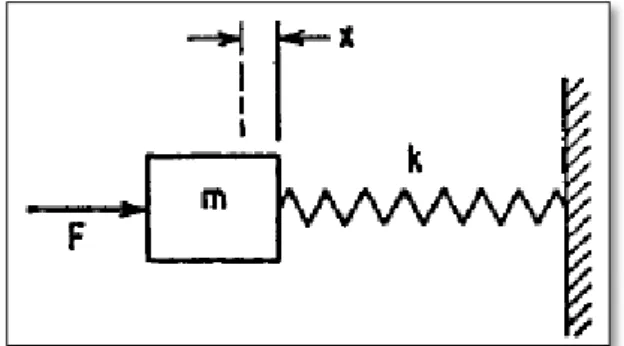
2.1.5. Getaran paksa (Force vibration)
2.1.5.1. Force vibration tanpa redaman
Getaran paksa (Force vibration) tanpa redaman terjadi karena rangsangan gaya luar disebut getaran paksa, sistem teraksitasi akibat gaya tanpa redaman seperti pada Gambar 2.10.
Gambar 2.10 Sistem Teraksitasi Akibat Gaya Tanpa Redaman (Robert K. Vierck, 1995)
Eksitasi ini biasanya dihasilkan oleh ketidak seimbangan pada mesin-mesin yang berputar dan dapat dirumuskan sebagai berikut:
t F kx x
m 0sin ...(2.26) 2.1.5.2. Force vibration dengan redaman
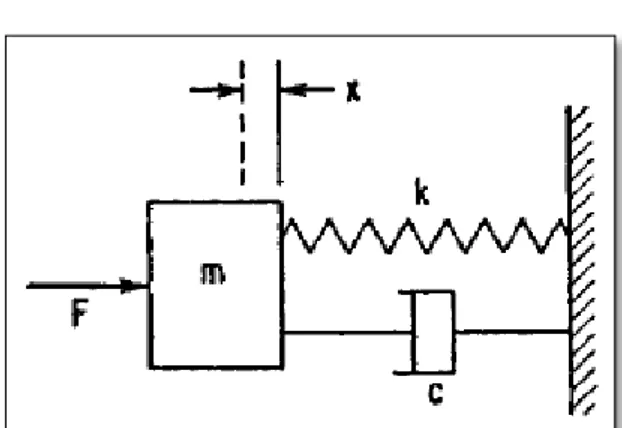
Getaran paksa (Force vibration) dengan redaman ditunjukkan pada Gambar 2.11. yaitu sistem teraksitasi akibat gaya dengan redaman,
dimana sistem yang teredam karena kekentalan dengan eksitasi harmonik, persamaan diferensial geraknya adalah:
t F kx x c x m 0sin ... (2.27)
Gambar 2.11 Sistem Teraksitasi Akibat Gaya dengan Redaman (Robert K. Vierck, 1995)
Solusi khusus persamaan diatas adalah keadaan tunak (steady state) dengan frekuensi ω yang sama dengan frekuensi eksitasi, sehingga dapat diasumsikan menjadi:
A t x sin ...(2.28) t t A x sin
cos
...(2.29) Dimana: A = amplitudo osilasi = beda fase simpangan terhadap gaya eksitasi
Dari rumus diatas, maka diperoleh:
2
2
2 0 c m k F A ... (2.30) dan2 1 tan m k c ... (2.31)
Dengan membagi pembilang dan penyebut persamaan (2.30) dan (2.31) dengan k, diperoleh: 2 2 2 0 1 k c k m k F A ... (2.32) k m k c 2 1 tan ... (2.33) 2.2 Getaran Torsional
Penelusuran getaran yang terjadi pada mesin dapat berupa getaran translasi maupun rotasi. Getaran translasi dapat terjadi dalam arah lateral ataupun aksial. Getaran lateral terjadi pada arah tegak lurus sumbu poros, sedangkan getaran aksial terjadi dalam searah sumbu poros. Getaran rotasi merupakan getaran yang terjadi dalam arah putar sering disebut sebagai getaran torsional. Getaran torsional adalah getaran penyimpangan sudut periodik yang terjadi diakibatkan bekerjanya eksitasi gaya torsi (momen) pada poros elastis. Osilasi torsional pada poros berdasarkan perumusan sebagai berikut:
lpG L M t) ( ... (2.34) Dimana: θ(t) = Penyimpangan sudut M = Torsi L = Panjang poros lp = Inersia Polar G = Modulus geser
Gambar.2.12. Ekuivalen getaran linear dan torsional 2.3 Teori Dasar Roda gigi Lurus
Roda gigi digunakan untuk mentransmisikan daya dan putaran yang tepat, sering digunakan karena dapat meneruskan putaran dan daya yang lebih bervariasi dan tepat daripada menggunakan alat transmisi yang lainnya, selain itu rodagigi juga memiliki beberapa kelebihan jika dibandingkan dengan alat transmisi lainnya, yaitu:
- Sistem transmisinya lebih ringkas, putaran lebih tinggi dan daya yang besar.
- Sistem yang kompak sehingga konstruksinya sederhana. - Kemampuan menerima beban lebih tinggi.
- Efisiensi pemindahan dayanya tinggi karena faktor terjadinya slip sangat kecil.
- Kecepatan transmisi rodagigi dapat ditentukan sehingga dapat digunakan dengan pengukuran yang kecil dan daya yang besar.
Dalam teori roda gigi pada umumnya dianggap sebagai benda kaku yang hampir tidak mengalami perubahan bentuk dalam jangka waktu lama.
Roda gigi diklasifikasikan menurut letak poros, menurut arah putaran, menurut bentuk jalur gigi. Roda gigi lurus digunakan untuk poros yang sejajar atau paralel. Dibandingkan dengan jenis roda gigi yang lain roda gigi lurus ini paling mudah dalam proses pengerjaannya (machining) sehingga harganya lebih murah. Rodagigi lurus ini cocok digunakan pada sistim transmisi yang gaya kelilingnya
besar, karena tidak menimbulkan gaya aksial. Roda gigi Lurus Luar dapat dilihat pada Gambar 2.13.
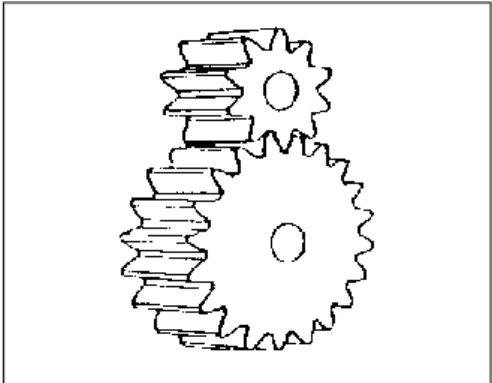
Gambar 2.13. Rodagigi Lurus Luar 2.3.1. Perbandingan Putaran
Jika putaran rodagigi yang berpasangan dinyatakan dengan n1 (rpm) pada
poros penggerak dan n2 (rpm) pada poros yang digerakkan, diameter lingkaran
jarak bagi d1 (mm) dan d2 (mm) dan jumlah gigi z1 dan z2, maka perbandingan
putaran u adalah : i z z mz mz d d n n u 1 2 1 2 1 2 1 2 1 ... (2.35)
Harga i adalah perbandingan antara jumlah gigi pada rodagigi dan pinion, dikenal juga sebagai perbandingan transmisi atau perbandingan rodagigi. Perbandingan ini dapat sebesar 4 sampai 5 dalam hal rodagigi lurus standar, dan dapat diperbesar sampai 7 dengan perubahan kepala.
Berikut istilah penamaan pada roda gigi yang perlu diketahui yaitu: - Lingkaran pitch (pitch circle)
Lingkaran khayal yang menggelinding tanpa terjadinya slip. Lingkaran ini merupakan dasar untuk memberikan ukuran-ukuran gigi seperti tebal gigi, jarak antara gigi dan lain-lain.
- Pinion
Roda gigi yang lebih kecil dalam suatu pasangan roda gigi. - Diameter lingkaran pitch (pitch circle diameter)
Merupakan diameter dari lingkaran pitch. - Diametral Pitch
Jumlah gigi persatuan pitch diameter - Jarak bagi lingkar (circular pitch)
Jarak sepanjang lingkaran pitch antara profil dua gigi yang berdekatan atau keliling lingkaran pitch dibagi dengan jumlah gigi, secara formula dapat ditulis:
z d
t ... (2.36)
- Modul (module)
Perbandingan antara diameter lingkaran pitch dengan jumlah gigi dirumuskan:
z d
m ... (2.37) - Adendum (addendum)
Jarak antara lingkaran kepala dengan lingkaran pitch dengan lingkaran pitch diukur dalam arah radial.
- Dedendum (dedendum)
Jarak antara lingkaran pitch dengan lingkaran kaki yang diukur dalam arah radial.
- Working Depth
Jumlah jari-jari lingkaran kepala dari sepasang rodagigi yang berkontak dikurangi dengan jarak poros.
- Clearance Circle
Lingkaran yang bersinggungan dengan lingkaran addendum dari gigi yang berpasangan.
- Pitch point
Titik singgung dari lingkaran pitch dari sepasang rodagigi yang berkontak yang juga merupakan titik potong antara garis kerja dan garis pusat.
- Operating pitch circle
Lingkaran singgung dari sepasang rodagigi yang berkontak. - Lingkaran kepala gigi (Addendum circle)
- Lingkaran kaki gigi (Dedendum circle) Lingkaran yang membatasi kaki gigi. - Width of space
Tebal ruang antara rodagigi diukur sepanjang lingkaran pitch. - Sudut tekan (pressure angle)
Sudut yang dibentuk dari garis normal dengan kemiringan dari sisi kepala gigi.
- Kedalaman total (total depth)
Kedalaman gigi diukur sejajar sumbunya, tinggi dari adendum dan dedendum.
- Lebar gigi (face width)
Diukur sepanjang lingkaran pitch. - Lebar ruang (tooth space)
Ukuran ruang antara dua gigi sepanjang lingkaran pitch - Backlash
Selisih antara tebal gigi dengan lebar ruang. - Sisi kepala (face of tooth)
Permukaan gigi diatas lingkaran pitch - Sisi kaki (flank of tooth)
Permukaan gigi dibawah lingkaran pitch. - Puncak kepala (top land)
Permukaan di puncak gigi
Sedangkan Gambar 2.14. menunjukkan bagian-bagian dari roda gigi lurus.
2.3.2. Model Dinamis Rodagigi Lurus
Terjadinya kontak antar rodagigi penggerak dan digerakkan dapat mengalami kerusakan berupa gigi patah ataupun keausan. Perhitungan gaya yang bekerja Gaya Ft dalam arah putaran roda gigi:
b FnCos
Ft
... (2.38) Dimana:Ft = Gaya tangensial
Fn = Tekanan normal pada permukaan gigi αb = Sudut tekanan kerja
Jika diameter jarak bagi adalah d (mm) , maka kecepatan keliling v (m/s) pada lingkaran jarak bagi roda gigi yang mempunyai putaran n (rpm) adalah:
1000 . 60 . .dn V ... (2.39) Hubungan antar daya yang ditransmisikan P (kW) , gaya tangensial Ft (kg) dan kecepatan keliling v (m/s), adalah:
102 V F
P t ... (2.40) Pendekatan perhitungan model dinamis untuk roda gigi lurus yang berpasangan dapat dilihat seperti Gambar 2.15. Hal ini dapat dikategorikan kedalam system Force Vibration dengan redaman.
Sistem yang teredam eksitasi harmonik, persamaan diferensial geraknya adalah: t F kx x c x m 0sin ... (2.41) Solusi khusus persamaan diatas adalah keadaan tunak (steady state) dengan frekuensi ω yang sama dengan frekuensi eksitasi, sehingga dapat diasumsikan menjadi:
A t x sin ... (2.42) t B t A x sin
cos
... (2.42) dengan A adalah amplitudo osilasi dan ф adalah beda fase simpangan terhadap gaya eksitasi, maka diperoleh:
2
2
2 0 c m k F A ... (2.44) dan 2 1 tan m k c ... (2.45) Dengan membagi pembilang dan penyebut persamaan (2.44) dan (2.45) dengan k, diperoleh: 2 2 2 1 k c k mw A k Fo ... (2.46) k m k c 2 1 tan ... (2.47) 2.4. Parameter PengukuranParameter yang akan diukur untuk menganalisa getaran mesin adalah displacement (perpindahan), velocity (kecepatan) dan acceleration (percepatan). Pengukuran ketiga parameter tersebut dipengaruhi oleh impedansi mekanisnya. Bila tanggapan (respons) terlalu kecil maka getaran akan sulit dianalisa, bila tanggapan berubah secara drastis dengan frekuensi maka perubahan puta mesin dapat menghasilkan perubahan tingkat getaran yang menyesatkan. Hal lain yang ran perlu diperhatikan adalah frekuensi natural. Pada frekwensi ini
suatu struktur akan turut bergetar secara alami disebut resonansi, yaitu tanggapan getaran dengan amplitudo besar.
Dalam pemilihan tranduser harus mempertimbangkan parameter apa yang kita inginkan untuk diukur. Panduan pemilihan parameter pengukuran dapat di lihat pada Tabel 2.3.
Tabel 2.3 Panduan Pemilihan Parameter Pengukuran Parameter Faktor pemilihan Parameter Pengukuran Perpindahan
(displacement)
a) frekuensi rendah, dibawah 600 cpm
b) pengukuran getaran shaft pada mesin berat dengan rotor yang relatif ringan.
c) menggunakan transduser velocity dan tranduser acceleration.
d) transduser velocity, untuk mengukur displacement dengan rangkaian single integrator.
e) transduser accelerometer, dapat digunakan untuk mengukur displacement getaran dengan rangkaian double integrator.
Kecepatan (velocity)
a) range frekuensi antara 600 – 100.000 cpm b) pengukuran over all level getaran mesin
c) untuk melakukan prosedur analisa secara umum Perpindahan
(acceleration)
a) pengukuran pada frekuensi tinggi/ultrasonic sampai 600000 cpm atau lebih
b) untuk pengukuran spike energy pada roll bearing, ball bearing, gear, dan sumber getaran aerodinamis dengan frekuensi tinggi
2.5. Standart Pengukuran Getaran
Yang paling banyak digunakan sebagai Standart indicator dari kelayakan vibrasi adalah ISO 2372 (BS4675). Standar ini dapat digunakan untuk
menentukan tingkat vibrasi yang dapat diterima bagi berbagai kelas permesinan. Dengan demikian, untuk menggunakan standar ISO ini, pertama-tama perlu mengklasifikasikan permesinan yang akan di uji. Dengan membaca chart dapat mengkaitkan kondisi kerusakan permesinan dengan getaran sebagai monitoring perawatan berbasis kondisi. Standar yang digunakan adalah parameter kecepatan (rms) untuk mengindikasikan kerusakan. Huruf A,B,C,D seperti terlihat pada Tabel 2.4. yaitu tentang pedoman bagi kelayakan permesinan ISO 2732.
Tabel 2.4. Pedoman bagi kelayakan permesinan ISO 2732. Nilai batas Keparahan
Vibrasi
Kualitas untuk Tingkat Kelas Permesinan Kecepatan (in/s)-Peak Kecepatan (mm/s)-rms Kelas I Kelas II Kelas III Kelas IV 0,015 0,28 0.025 0,45 0,039 0,71 0,062 1,12 0,099 1,8 0,154 2,8 0,248 4,5 0,392 7,1 0,617 11,2 0,993 18 1,540 28 2,48 45 3,94 71
Dari Tabel 2.4. dapat dijelaskan bahwa: 1. Kelas I
Bagian mesin secara integral dikaitkan sebagai permesinan lengkap dalam kondisi pengoperasian normal (motor listrik sampai 15 kW) 2. Kelas II
A
B
C
D
Peralatan pemesinan berukuran sedang (motor listrik dengan output 15-75 kW) tanpa fondasi khusus, mesin terpasang mati (hingga 300 kW) dengan fondasi khusus.
3. Kelas III
Mesin dengan penggerak utama yang lebih besar dan mesin-mesin besar lainnya dengan rotating masses-terpasang mati pada fondasi padat dan fondasi berat yang indikatornya sulit bagi penjalaran getaran. 4. Kelas IV
Mesin dengan penggerak utama yang lebih besar dan mesin-mesin besar lainnya dengan rotating masses-terpasang pada fondasi yang indikatornya mudah bagi pengukuran getaran (sebagai contoh turbogenerator set terutama dengan substruktur yang ringan).
Zona A : hijau, vibrasi dari mesin sangat baik dan dibawah vibrasi yang diizinkan.
Zona B : kuning, vibrasi dari mesin baik dan dapat dioperasikan karena masih dalam batas yang diizinkan.
Zona C : orange, vibrasi dari mesin dalam batas toleransi dan hanya dioperasikan dalam waktu terbatas.
Zona D : merah, vibrasi dari mesin dalam batas berbahaya dan kerusakan dapat terjadi padamesin.
2.6. Pengolahan Data Vibrasi
Sinyal yang diperoleh melalui transduser pada pengukuran getaran mesin adalah gabungan berbagai respons (tanggapan) bangunan mesin terhadap bermacam-macam gaya ekstasi. Analisa yang efektif adalah menguraikan sinyal kompleks ini menjadi komponen-komponennya. Ada pandangan dalam persoalan analisis getaran menjadi komponennya, yaitu:
2.6.1. Time Domain
Hasil pengukuran objek pemantauan dalam time domain dapat berupa sinyal seperti Gambar 2.16.:
1) Sinyal statik, yaitu sinyal yang karakteristiknya (misal: amplitudo, arah kerjanya) tidak berubah terhadap waktu.
2) Sinyal dinamik, yaitu sinyal yang karakteristiknya berubah terhadap waktu, sehingga tidak konstan.
Gambar 2.16 Karakteristik Sinyal Statik dan Dinamik (Ramses Y. Hutahaean)
Dalam kasus pengukuran untuk memungkinkan pengukuran objek pemantauan berupa sinyal dinamik, maka diperlukan sensor yang memiliki karakteristik dinamik tertentu. Sinyal dinamik yang sering ditemui dalam praktek berasal dari sinyal getaran. Untuk keperluan pengolahan sinyal getaran dalam time domain, perlu diperhatikan karakteristik sinyal getaran yang dideteksi oleh masing-masing sensor percepatan, kecepatan, dan simpangan getaran.