Muhammad Rifki Fajrianto
*), Wahyudi, and Sudjadi
Departemen Teknik Elektro, Universitas Diponegoro Semarang Jl. Prof. Sudharto, SH, Kampus UNDIP Tembalang, Semarang 50275, Indonesia*)E-mail: [email protected]
Abstrak
Motor Brushless DC (BLDC) merupakan salah satu jenis motor listrik dengan struktur yang sederhana, kehandalan yang tinggi, perawatan yang mudah dan efisiensi tinggi namun membutuhkan proses yang kompleks untuk mengendalikannya secara konvensional sehingga sulit dimodelkan dengan model matematika biasa. Maka dari itu diperlukan suatu metode pengendalian motor BLDC yang mampu mengatasi kesulitan tersebut, salah satunya dengan Kontroler Fuzzy Model Reference Learning Control (FMRLC). FMRLC merupakan modifikasi metode Fuzzy Logic Control (FLC) dan Model Reference Adaptive Control (MRAC), yaitu FLC yang memiliki sebuah sistem pembelajaran untuk meningkatkan kinerjanya dari waktu ke waktu ketika berinteraksi dengan lingkungannya. Pengujian dilakukan pada pengaruh nilai konstanta waktu model terhadap respon transien kecepatan motor BLDC. Nilai rata – rata keadaan steady state respon sistem pada tiga kecepatan referensi yang didapat ketika model referensi menggunakan konstanta waktu 5 detik sebesar 6,86 detik, konstanta waktu 6 detik sebesar 8,13 detik, konstanta waktu 7 detik sebesar 9,61 detik, konstanta waktu 8 detik sebesar 10,75 detik, dan konstanta waktu 9 detik sebesar 12,68 detik. Hasil tersebut menunjukkan semakin besar konstanta waktu model, respon sistem dalam mencapai keadaan steady state semakin lambat.
Kata kunci: motor Brushless DC (BLDC), FMRLC, mikrokontroler ATmega16, respon transien
Abstract
Brushless DC motor is one type of electric motors with a simple structure, high reliability, easy maintenance and high efficiency but requires a complex process to be controlled with conventional method.Therefore, a BLDC motor control method that can solve the difficulty is needed, one of them is named Fuzzy Control Model Reference Learning Control (FMRLC). FMRLC is a modification method of Fuzzy Logic Control (FLC) and Model Reference Adaptive Control (MRAC), which is FLC has a learning system to improve its system performance from time to time when interacting with its environment. The test is done on the effect of the time constant of the model on the transient response of BLDC motor speed. The average of the steady state time system response at three reference velocities obtained when the reference model uses a time constant of 5 seconds it has 7,02 seconds steady state time, the time constant of 6 seconds has 8.1seconds steady state time, the time constant of 7 seconds has 9.47 seconds steady state time, the constants time 8 seconds has 10.65 seconds steady state time, and a time constant of 9 seconds has 12.51 seconds steady state time. These results show the greater the time constant of the model, the system response in reaching the steady state is slower. Keywords: Brushless DC motor (BLDC),FMRLC, Atmega16 microcontroller, transient response
1.
PendahuluanMotor BLDC (Brushless DC) merupakan motor listrik dengan struktur yang sederhana, kehandalan yang tinggi dan perawatan yang mudah dengan kelebihan motor DC seperti efisiensi tinggi, tidak ada kerugian eksitasi dan bila dibandingkan dengan motor listrik lainnya, motor BLDC telah menunjukkan kinerja yang lebih baik sebagai aktuator [1]. Perancangan pengendali motor BLDC secara konvensional melibatkan proses yang kompleks dan membutuhkan model matematis akurat yang sulit ditemukan karena sifat dari motor BLDC yang nonlinear
atau berubah sepanjang waktu [2]. Berdasarkan hal tersebut, beberapa solusi kontrol modern seperti sistem kontrol cerdas ditawarkan dalam merancang pengendali atau kontroler kecepatan motor BLDC [3][4]. Salah satu metode yang dipilih dalam mengendalikan kecepatan motor BLDC adalah menggunakan Fuzzy Model Reference Learning Control (FMRLC). FMRLC merupakan modifikasi metode Fuzzy Logic Control (FLC) dan Model Reference Adaptive Control (MRAC), yaitu FLC yang memiliki sebuah sistem pembelajaran untuk meningkatkan kinerjanya dari waktu ke waktu ketika berinteraksi dengan lingkungannya [5]. Pengendali FMRLC termasuk
kelompok kendali cerdas yang bekerja dengan menggunakan logika fuzzy yaitu logika dengan nilai kebenaran antara 0 dan 1 serta diperlukan model matematik dari sistem sebagai referensi untuk pengendalian adaptif. Pada penelitian ini perancangan dan implementasi sistem pengendali kecepatan motor BLDC berbasis FMRLC ke dalam mikrokontroler ATmega16.
2.
Metode
2.1. Karakteristik Kontrol
Umumnya karakteristik performansi sistem kontrol yang diinginkan dinyatakan dalam bentuk besaran waktu. Seringkali, karakteristik performansi sistem kendali dinyatakan dalam bentuk respon transien terhadap masukan tangga satuan karena mudah dibangkitkan dan cukup radikal. Dalam menentukan karakteristik respon transien sistem kontrol terhadap masukan tangga satuan, umumnya dicari parameter yang memiliki spesifikasi seperti Gambar 1[6]:
a. Waktu tunda (𝑡𝑑), adalah waktu yang diperlukan respon untuk mencapai setengah harga naik yang pertama kali.
b. Waktu naik (𝑡𝑟), adalah waktu yang diperlukan respon untuk naik dari 10 sampai 90%, 5 sampai 95%, atau 0 sampai 100% dari harga akhirnya. Untuk sistem B-spline orde kedua redaman kurang, biasanya digunakan waktu 0 – 100%.
c. Waktu puncak (𝑡𝑝), adalah waktu yang diperlukan respon untuk mencapai puncak lewatan yang pertama kali.
d. (Persen) lewatan maksimum (𝑀𝑝), adalah harga puncak maksimum dari kurva respon yang diukur 1. Jika harga keadaan tunak respon tidak sama dengan satu, maka biasa digunakan persen lewatan maksimum. e. Waktu penetapan (𝑡𝑠), adalah waktu yang diperlukan
kurva respon untuk mencapai dan menetap dalam daerah sekitar harga akhir yang ukurannya ditentukan dengan presentase mutlak dari harga akhir (biasanya 5% atau 2%).
Gambar 1. Ilustrasi karakteristik kontrol.
2.2. Perancangan Sistem
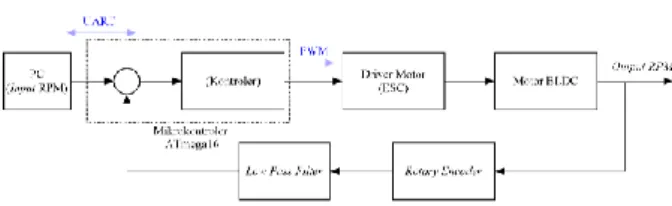
Secara umum sistem pengendalian kecepatan motor BLDC yang dibuat pada penelitian ini dapat dilihat pada Gambar 2. Pada Gambar 2 terlihat bahwa komponen utama yang dikendalikan adalah sebuah motor BLDC 360 kv. Motor
BLDC 14 pole yang digunakan pada penelitian ini memiliki kecepatan rendah sehingga memudahkan dalam pembacaan kecepatan aktual motor. Kecepatan aktual motor BLDC (RPM) diperoleh dari hasil pembacaan kecepatan oleh sensor rotary encoder yang telah dilewati Low-pass filter (LPF). LPF digunakan untuk mengurangi noise pada pembacaan kecepatan aktual motor dengan modul encoder FC-03.
Pada penelitian ini pengendalian kecepatan motor BLDC mengunakan kontroler FMRLC yang akan ditanamkan pada mikrokontroler ATmega16. Mikrokontroler ATmega16 membutuhkan data input berupa kecepatan referensi atau setpoint, beberapa parameter kontroler, dan kecepatan aktual motor agar kontroler dapat bekerja. Data input tersebut didapat melalui media komunikasi serial UART yang menghubungkan mikrokontroler dengan program interface pada komputer. Setelah itu mikrokontroler akan melakukan proses pengontrolan yang menghasilkan sinyal PWM untuk dijadikan masukan pada driver motor BLDC yang dalam penelitian ini berupa Electronic Speed Controller (ESC) yang dibutuhkan motor BLDC agar dapat berputar.
Gambar 2. Diagram blok perancangan sistem.
2.3. Perancangan Kontroler FMRLC
FMRLC merupakan perpaduan antara fuzzy logic control (FLC) dan model reference adaptive controller (MRAC). Dalam FMRLC, istilah "learning" digunakan sebagai pengganti "adaptif" karena FMRLC tidak hanya menyesuaikan parameter membership function (fungsi keanggotaan), tetapi juga mengingat nilaiyang telah diatur sebelumnya [8]. Fungsional diagram blok untuk FMRLC ditunjukkan pada Gambar 3 dan diagram alir program utama ditunjukkan pada Gambar 4 [8][9].
Gambar 4. Diagram alir utama.
FMRLC memiliki empat bagian utama: plant, fuzzy controller (kontroler fuzzy), reference model (model referensi), dan learning mechanism (mekanisme pembelajaran/ mekanisme adaptasi) [9].
2.2.1. Kendali Fuzzy
Pada penelitian ini kontroler sebagai pengambil keputusan menggunakan logika fuzzy Sugeno untuk mengatur besar pulsa PWM yang diberikan ke motor BLDC agar kecepatan motor sesuai dengan referensinya. Program ini terdiri atas fuzzifikasi, evaluasi aturan atau mekanisme pengambilan keputusan, dan defuzzifikasi. Keluaran pada proses defuzzifikasi merupakan hasil dari proses kendali fuzzy secara keseluruhan.
1. Fuzzifikasi
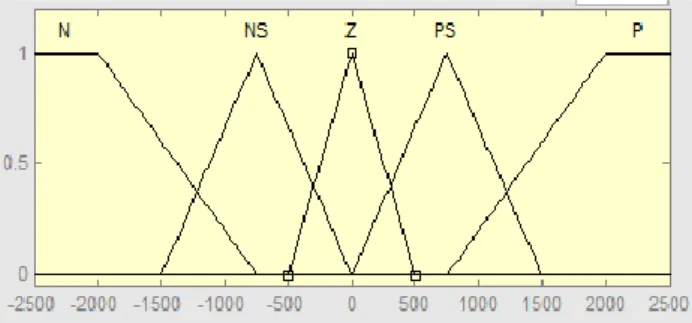
Pada perancangan kontroler logika fuzzy penelitian ini diambil batasan maksimal kecepatan motor adalah 2500 RPM. Dari data tersebut dapat dirancang batasan-batasan fungsi keanggotaan error, adalah galat maksimal yang akan dihasilkan yaitu 2500. Pada perancangan ini label N pada fungsi keanggotaan error dan Δ error yaitu -2500 dan -1, sedangkan untuk label P pada fungsi keanggotaan error dan Δ error yaitu sebesar 2500 dan 1. Fungsi keanggotaan masukan mempuyai bentuk trapezium dan segitiga. Gambar 5 dan Gambar 6 menunjukkan batasan-batasan fungsi keanggotaan error, dan Δerror.
Gambar 5 Fungsi keanggotaan masukan error fuzzy.
Gambar 6 Fungsi keanggotaan masukan Δerror fuzzy.
Selain perancangan basis data dalam input fuzzy, juga dilakukan perancangan basis data untuk fungsi outputfuzzy atau fungsi konsekuensi. Fungsi konsekuensi yang digunakan dapat dituliskan dalam persamaan (1).
𝑍 = 0,00075𝑒(𝑘𝑡) + 0,00075𝑒𝑐(𝑘𝑡) + 𝑏 (1)
2. Evaluasi Aturan
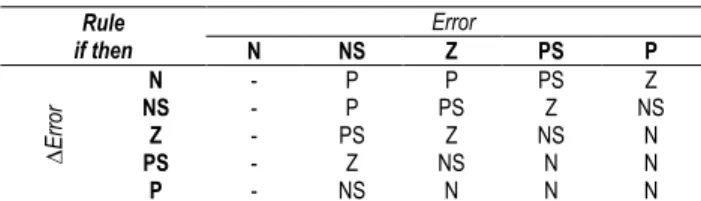
Tahapan kedua dalam Fuzzy Inference System adalah evaluasi aturan. Evaluasi aturan adalah proses mengevaluasi derajat keanggotaan tiap-tiap fungsi keanggotaan himpunan masukan fuzzy ke dalam basis aturan yang telah ditetapkan. Tujuan tahap ini adalah menentukan derajat keanggotaan dari keluaran sistem fuzzy. Seluruh logika rule-base kontroler fuzzy yang dirancang dan dirangkum pada Tabel 1.
Tabel 1. Basis aturan fuzzy. Rule if then N NS Error Z PS P ∆Er ror N - P P PS Z NS - P PS Z NS Z - PS Z NS N PS - Z NS N N P - NS N N N
Metode pengambilan keputusan yang digunakan dalam perancangan program kontrol fuzzy ini adalah metode implikasi min. Setelah semua aturan fuzzy dieksekusi, dilakukan proses pengambilan nilai minimal dari masing-masing fungsi keanggotaan variabel keluaran.
3. Defuzzifikasi
Defuzzifikasi merupakan tahap akhir dalam perancangan metode kontrol fuzzy. Dalam perancancangan fuzzy metode Sugeno, untuk mendapatkan nilai keluaran fuzzy digunakan metode weight average atau dengan mencari nilai rata-rata untuk semua nilai keluaran masing-masing aturan [7]. Pada sistem logika fuzzy ini fungsi keanggotaan keluarannya digunakan lima buah fungsi konskuensi maka rumus yang digunakan dengan jumlah n sebanyak 25, sehingga menjadi persamaan (2): 𝑍 = ∑ 𝑊𝑛𝑍𝑛 𝑊𝑛 25 𝑛=1 (2) 2.2.2. Model Referensi
Model referensi yang digunakan dalam penelitian ini merupakan persamaan close-loop dalam fungsi laplace orde satu yang telah diubah dalam persamaan diskrit sesuai dengan persamaan (3):
𝐺𝑚(𝑠) =𝑦𝑚(𝑠)
𝑟(𝑠) = 𝑏𝑚
𝑠+𝑎𝑚 (3)
Fungsi alih yang menunjukkan nilai konstanta waktu dapat ditulis dalam persamaan (4) :
𝐺𝑚(𝑠) =𝑦𝑚(𝑠) 𝑟(𝑠) = 𝑏𝑚 𝑎𝑚 ⁄ 1𝑎 𝑚.𝑠 ⁄ +1 (4)
Nilai konstanta waktu τ = 1/am, sehingga dengan menentukan nilai konstanta waktu model, maka dapat diperoleh nilai am. Agar kesalahan keadaan tunaknya nol dipilih model dengan nilai bm = am. Model tersebut diubah ke dalam persamaan diskrit, maka dengan metode diskritisasi pendekatan persamaan diferensial diperoleh persamaan (5): 𝑦𝑚(𝑘𝑇) = ( 1 1+𝑎𝑚(𝑘𝑇)) 𝑦𝑚(𝑘𝑇 − 𝑇) + ( 𝑏𝑚(𝑘𝑇) 1+𝑎𝑚(𝑘𝑇)) 𝑟(𝑘𝑇) (5)
2.2.3. Fuzzy Inverse Model
Fuzzy inverse model menggunakan membership function dan memiliki struktur yang sama dengan kontroler fuzzy yang digunakan sebagai sistem kendali Program ini terdiri atas fuzzifikasi, evaluasi aturan atau mekanisme pengambilan keputusan, dan defuzzifikasi. Keluaran pada proses defuzzifikasi merupakan parameter adaptif yang mengubah keluaran kendali fuzzy.
1. Fuzzifikasi
Pada tahap ini, dirancang fungsi keanggotaan untuk error perbaikan 𝑦𝑒(𝑘𝑇)dan perubahan error perbaikan 𝑦𝑐(𝑘𝑇). Fungsi keanggotaan yang digunakan yang digunakan fungsi bahu. Jumlah fungsi keanggotaan untuk 𝑦𝑒(𝑘𝑇) dan 𝑦𝑐(𝑘𝑇) masing-masing adalah lima fungsi keanggotaan. Fungsi keanggotaan untuk 𝑦𝑒(𝑘𝑇) dan 𝑦𝑐(𝑘𝑇) masing-masing ditunjukkan pada Gambar 7 dan Gambar 8.
Gambar 7. Fungsi keanggotaan masukan error fuzzy inverse
model.
Gambar 8. Fungsi keanggotaan masukan Δerror fuzzy inverse model.
Selain perancangan basis data dalam input fuzzy, juga dilakukan perancangan basis data untuk fungsi outputfuzzy atau fungsi konsekuensi. Fungsi konsekuensi yang digunakan dapat dituliskan dalam persamaan (6).
𝑝 = 0,0006𝑦𝑒(𝑘𝑇) + 0,0006𝑦𝑐(𝑘𝑇) (6)
2. Evaluasi Aturan
Tahapan kedua dalam Fuzzy Inference System adalah evaluasi aturan. Evaluasi aturan adalah proses
mengevaluasi derajat keanggotaan tiap-tiap fungsi keanggotaan himpunan masukan fuzzy ke dalam basis aturan yang telah ditetapkan. Tujuan tahap ini adalah menentukan derajat keanggotaan dari keluaran sistem fuzzy inverse model. Seluruh logika rule-base kontroler fuzzy inverse model yang dirancang dan dirangkum pada Tabel
2.
Tabel 2 Basis aturan fuzzy inverse model. Rule if then N NS Error Z PS P ∆Er ror N - P P PS Z NS - P PS Z NS Z - PS Z NS N PS - Z NS N N P - NS N N N
Metode pengambilan keputusan yang digunakan dalam perancangan program kontrol fuzzy ini adalah metode implikasi min. Setelah semua aturan fuzzy dieksekusi, dilakukan proses pengambilan nilai minimal dari masing-masing fungsi keanggotaan variabel keluaran.
3. Defuzzifikasi
Defuzzifikasi merupakan tahap akhir dalam perancangan metode kontrol fuzzy. Dalam perancancangan fuzzy metode Sugeno, untuk mendapatkan nilai keluaran fuzzy digunakan metode weight average atau dengan mencari nilai rata-rata untuk semua nilai keluaran masing-masing aturan. Pada sistem logika fuzzy ini fungsi keanggotaan keluarannya digunakan lima buah fungsi konskuensi maka rumus yang digunakan dengan jumlah n sebanyak 25, sehingga menjadi persamaan (6): 𝑝 = ∑ 𝑊𝑚𝑛𝑝𝑛 𝑊𝑚𝑛 25 𝑛=1 (6) 2.2.4. Knowledge-base Modifier
Knowledge-base modifier merupakan fungsi modifikasi kontroler fuzzy yang memaksa error antara output proses dan output model referensi menuju nol. Knowledge-base modifier merubah aturan-dasar kontroler fuzzy yang membuat aksi kontrol yang diterapkan sebelumnya akan termodifikasi oleh variabel peubah 𝑝(𝑘𝑇) (output fuzzy inverse model) [10]. Knowledge-base modifier mendapatkan variabel masukan dari fuzzy inversemodel,
𝑝(𝑘𝑇). Variabel 𝑝(𝑘𝑇) ini akan menjadi faktor yang akan merubah rule dari kontroler fuzzy. Perubahan rule terjadi pada nilai keluaran rule tersebut, tepatnya pada variable konstan pada fungsi output rule. Karena adanya variabel
𝑝(𝑘𝑇) ini, maka fungsi output rule pada blok fuzzy sesuai persamaan (7).
𝑏(𝑘𝑇) = 𝑏(𝑘𝑇 − 𝑇) + 𝑝(𝑘𝑇) (7)
dengan 𝑏(𝑘𝑇) adalah konstanta pada fungsi output fuzzy Sugeno. Inisialisasi awal untuk 𝑏(𝑘𝑇 − 𝑇) pada fungsi outputfuzzy adalah nol.
3.
Hasil dan Analisa
Pengujian pada kontrol adaptif skema FMRLC dilakukan untuk mengetahui pengaruh parameter – parameter sistem terhadap respon sistem. Parameter – parameter yang mempengaruhi respon tersebut konstanta waktu model (τ), perubahan referensi dan pengaruh adanya gangguan. Di samping itu pengujian dilakukan untuk mengetahui dinamika respon sistem dalam mengikuti model referensinya, dimana model dipilih berdasarkan konstanta waktu tertentu yang telah ditentukan.
3.1. Pengujian Nilai Konstanta Waktu Model Referensi
Pada pengujian ini dipilih lima model dengan konstanta waktu yang ber beda masing – masing 5,6,7,8,dan 9 detik pada referensi kecepatan motor 2500 RPM. Pengujian dilakukan untuk setiap konstanta waktu dengan kecepatan yang sama. Lama pengambilan data pengujian dilakukan selama 20 detik.
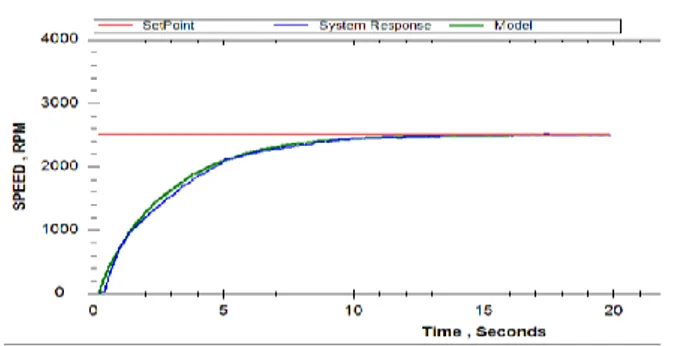
Hasil pengujian dengan konstanta waktu 5 detik ditunjukkan pada Gambar 9. Kecepatan referensi yang diuganakan motor adalah 2500 RPM.
Gambar 9. Respon sistem untuk konstanta waktu model 5 detik.
Hasil pengujian dengan konstanta waktu 6 detik ditunjukkan pada Gambar 10. Kecepatan referensi yang diuganakan motor adalah 2500 RPM.
Gambar 10. Respon sistem untuk konstanta waktu model 6 detik.
Hasil pengujian dengan konstanta waktu 7 detik ditunjukkan pada Gambar 11. Kecepatan referensi yang diuganakan motor adalah 2500 RPM.
Gambar 11. Respon sistem untuk konstanta waktu model 7 detik.
Hasil pengujian dengan konstanta waktu 8 detik ditunjukkan pada Gambar 12. Kecepatan referensi yang diuganakan motor adalah 2500 RPM.
Gambar 12. Respon sistem untuk konstanta waktu model 8 detik.
Hasil pengujian dengan konstanta waktu 9 detik ditunjukkan pada Gambar 13. Kecepatan referensi yang diuganakan motor adalah 2500 RPM.
Gambar 13. Respon sistem untuk konstanta waktu model 9 detik.
Berdasarkan grafik – grafik respon sistem hasil pengujian, pengaruh nilai konstanta waktu model menunjukkan bahwa performansi respon sistem dalam mengikuti respon
model sangat dipengaruhi oleh besarnya nilai konstanta waktu model yang diberikan. Dari grafik hasil pengujian dengan lima variasi konstanta waktu model dihasilkan respon sistem yang berbeda. Data nilai kostanta waktu untuk masing – masing model ditunjukkan pada Tabel 3. Berdasarkan Tabel 3 dapat dilihat jika konstanta waktu model yang dipilih semakin besar maka perubahan transien keluaran model semakin lama. Besarnya setpoint yang diberikan pada sistem juga mempengaruhi waktu kestabilan dari model referensi dan plant motor BLDC. Semakin besar nilai referensi yang diberikan semakin besar pula waktu yang dibutuhkan model dan plant untuk mencapai keadaan stabil. Sebagai contoh model dengan konstanta waktu 5 detik, plant dapat mencapai keadaan steady state dengan waktu sebesar 7,02 detik terhadap kecepatan referensi 2500 RPM sedangkan model dengan konstanta waktu 9 detik, plant dapat mencapai keadaan steady state dengan waktu rata – rata sebesar 12,68 detik terhadap kecepatan referensi 2500 RPM.
Tabel 3. Pengaruh konstanta waktu terhadap waktu steady
state.
Konstanta Waktu
Model(τ) Model Waktu Steady State (detik) Plant
5 7,02 7,02
6 8,13 8,13
7 9,61 9,61
8 10,75 10,75
9 12,68 12,68
3.2. Pengujian Nilai Kecepatan Referensi Naik Pengujian ini dilakukan untuk mengetahui kemampuan sistem dalam mengikuti perubahan referensi yang berubah naik, dengan referensi yang berubah dari 1500 RPM – 2000 RPM – 2500 RPM. Pengujian dilakukan dengan memberi perubahan setpoint setiap 15 detik. Hasil pengujian perubahan referensi naik dengan konstanta waktu model 5 detik ditunjukkan pada Gambar 14.
Gambar 14. Respon sistem untuk referensi berubah naik dengan konstanta waktu 5 detik.
Berdasarkan grafik respon sistem pada Gambar 14, dapat dilihat bahwa pengendali FMRLC yang digunakan untuk mengendalikan plant motor BLDC mampu mengikuti perubahan set point kecepatan yang diberikan. Pada
referensi 1500 RPM, respon sistem yang dihasilkan mencapai keadaan steady state pada waktu 6,86 detik. Ketika referensi dinaikan menjadi 2000 RPM, respon sistem yang dihasilkan akan mencapai keadaan steady state pada saat waktu 6,9 detik setelah referensi dinaikan. Ketika referensi dinaikan menjadi 2500 RPM, respon sistem yang dihasilkan akan mencapai keadaan steady state pada saat waktu 7,01 detik setelah dinaikan. Hal tersebut membuktikan ketika referensi semakin tinggi waktu yang dicapai untuk mencapai keadaan steady state cenderung meningkat.
3.3. Pengujian Nilai Kecepatan Referensi Turun Pengujian ini dilakukan untuk mengetahui kemampuan sistem dalam mengikuti perubahan referensi yang berubah turun, dengan referensi yang berubah dari 2500 RPM – 2000 RPM – 1500 RPM. Pengujian dilakukan dengan memberi perubahan setpoint setiap 15 detik. Hasil pengujian perubahan referensi naik dengan konstanta waktu model 5 detik ditunjukkan pada Gambar 15.
Gambar 15. Respon sistem untuk referensi berubah turun dengan konstanta waktu 5 detik.
Berdasarkan grafik respon sistem pada Gambar 15, dapat dilihat bahwa pengendali FMRLC yang digunakan untuk mengendalikan plant motor BLDC mampu mengikuti perubahan set point kecepatan yang diberikan. Pada referensi 2500 RPM, respon sistem yang dihasilkan mencapai keadaan steady state pada waktu 7,02 detik. Ketika referensi diturunakan menjadi 2000 RPM, respon sistem yang dihasilkan akan mencapai keadaan steady state pada saat waktu 6,2 detik setelah referensi diturunkan. Ketika referensi diturunkan menjadi 1500 RPM, respon sistem yang dihasilkan akan mencapai keadaan steady state pada saat waktu 5,61 detik setelah diturunkan. Hal tersebut membuktikan ketika referensi semakin turun waktu yang dicapai untuk mencapai keadaan steady state cenderung semakin menurun.
3.4. Pengujian dengan Gangguan
Pengujian terhadap pengaruh gangguan pada sistem kendali kecepatan dilakukan dengan pengujian pengaruh gangguan sesaat pada sistem. Gangguan yang dimaksud dalam pengujian ini adalah dengan memberikan
pengereman sesaat pada motor BLDC sehingga kecepatan motor BLDC turun drastis bahkan berhenti. Pemberian gangguan dilakukan ketika mencapai keadaan stabil, sesuai dengan referensinya. Pengujian ini dilakukan untuk mengetahui kemampuan atau unjuk kerja kendali FMRLC terhadap gangguan luar.Gambar 16 menunjukkan respon sistem dengan gangguan sesaat.
Gambar 16. Respon sistem dengan gangguan sesaat.
Pengujian dengan gangguan pada referensi 2000 RPM dan konstanta waktu 5 detik mengakibatkan kecepatan motor BLDC turun menjadi 1600 RPM. Motor BLDC mengalami penurunan kecepatan selama sekitar 1 detik, setelah 1 detik kendali logika fuzzy adaptif berupaya untuk mengembalikan keluaran sistem menuju setpoint dengan memberikan PWM yang lebih. Dapat terlihat ketika kendali logika fuzzy adaptif memberikan PWM yang lebih pada saat detik ke-16 sehingga terjadi overshoot kecepatan. Kecepatan pada saat detik ke-17 mencapai 2160 RPM, sehingga nilai overshoot yang terjadi adalah 8%.
4.
Kesimpulan
Berdasarkan seluruh uji coba yang telah dilakukan, dapat disimpulkan bahwa respon transien pengontrolan kecepatan motor BLDC dengan menggunakan kontroler FMRLC bergantung pada pemilihan konstanta waktu model. Semakin besar konstanta model yang dipilih, respon sistem akan semakin lama dalam mencapai kondisi steady state. Nilai steady state respon sistem pada kecepatan referensi 2500 RPM yang didapat ketika model referensi menggunakan konstanta waktu 5 detik sebesar 7,02 detik, konstanta waktu 6 detik sebesar 8,13 detik, konstanta waktu 7 detik sebesar 9,61 detik, konstanta waktu 8 detik sebesar 10,75 detik, dan konstanta waktu 9 detik sebesar 12,68 detik.
Referensi
[1] Dharmawan, Abe., "Pengendalian Motor Brushless DC dengan Metode PWM Sinusoidal Menggunakan ATmega16", Tugas Akhir, Teknik Elektro Universitas Indonesia, Jakarta, Indonesia, 2009.
[2] Yulianta, Agung Dwi., “Pengendalian Kecepatan Motor Brushless DC (BLDC) menggunakan Metode Logika Fuzzy”, Jurnal Sains, Teknologi danIndustri, vol. 12, no. 2, hal. 248-254, Juni. 2015.
[3] Z. Li, “CMAC Neural Networks Based Combining Control for BLDC Motor,” IEEE Xplore, 2009.
[4] Mosavi, M. R., Rahmati, A., dan Khoshsaadat A., “Design of Efficient Adaptive Neuro Fuzzy Controller Based on Supervisory Learning Capabl for Peed and
Torque Control of BLDC Motor”, PRZGLAD
ELEKTROTECHNICZHY (Electrical Review), R 88, 2012.
[5] Layne, J. R., and K. M. Passino, "Fuzzy model reference learning control", [Proceedings 1992] The First IEEE Conference on Control Applications, pp. 686–691, 1992.
[6] K. Ogata, Modern Control Engineering, Fifth Edit. United State of America: Pretience Hall, 2010.
[7] Ana Ratna Wati, D., “Sistem Kendali Cerdas”, Graha Ilmu, Yogyakarta, 2010.
[8] Khuntia, P. S dan Mitra, Debjani., Fuzzy Model Reference Learning Controller For Pitch Control System of an Aircraft, Department of Electronic and Communication Engineering, Durgapur Institute of Advanced Technology and Management, 2009. [9] Layne, Jeffery R. dan Passino, Kevin M., Fuzzy Model
Reference Learning Control, Department of Electrical Engineering, Ohio State University, 2015.
10] Passino, K, "Fuzzy Control", vol. 20106837. California: Addison Wesley Longman, Inc, 2010, pp. 55–1–55–27.