Rancang Bangun Sistem Kendali Tracking Sinar Matahari dengan Logika Fuzzy
As Habul Kahfi*), Firdaus**), Mohammad Hafiz Hersyah ***)
*†***Sistem Komputer, Universitas Andalas
**
Teknik Elektro, Politeknik Negeri Padang
E-Mail: *[email protected], **[email protected], ***[email protected]
Abstrak
Pada penelitian ini dibuat sebuah sistem yang dapat menggerakan posisi panel surya agar tegak lurus terhadap arah datangnya sinar matahari. Sistem ini terdiri atas 3 komponen utama yaitu rangkaian sensor cahaya LDR, Mikrokontroler dan motor DC gearbox dengan driver L298. Arah dan besar putaran dari motor DC gearbox ditentukan dengan menggunakan logika fuzzy. Masukan untuk logika fuzzy adalah selisih antara 2 sensor cahaya LDR, sedangkan keluaran dari logika fuzzy berupa nilai PWM yang nantinya akan digunakan untuk menggerakan motor. Setelah dilakukan pengujian. dapat di simpulkan bahwa daya paling maksimal didapat dengan kondisi posisi panel surya dikendalikan kearah datangnya sinar matahari dengan selisih tegangan keluaran sebesar 0,71 volt dengan posisi panel surya tanpa dikendalikan. Untuk sudut kemiringan yang diatur, rata-rata tegangan yang dihasilkan panel surya pada kondisi mengarah kearah matahari, diatur dengan sudut kemiringan 30° dan 60° menghasilkan rata-rata tegangan keluaran sebesar 20,41 volt, 19,50 volt, dan 19,21 volt.
Kata kunci: Panel Surya, Sensor Cahaya LDR, Mikrokontroller, Motor DC gearbox,
Logika Fuzzy
1.
PENDAHULUAN
Fakta bahwa cadangan energi akan
semakin menipis dan tidak dapat
diperbaharui lagi menimbulkan persoalan
pemenuhan energi bagi manusia.
Berdasarkan pertimbangan ini, maka sumber-sumber energi alternatif selain bahan bakar fosil terus diusahakan untuk dikembangkan guna mengurangi ketergantungan tersebut.
Sistem kendali tracking sinar matahari
merupakan salah satu pengembangan
teknologi dalam rangka konservasi energi dengan memanfaatkan energi matahari. Sistem kendali tracking dibuat untuk
diterapkan lebih lanjut pada sebuah
perangkat panel surya sebagai alat
pengumpul energi matahari sehingga posisi panel surya dinamis
2.
TINJAUAN PUSTAKA
2.1.Sistem Kendali
Sistem Kendali adalah proses
pengaturan ataupun pengendalian terhadap satu atau beberapa besaran (variabel, parameter) sehingga berada pada satu nilai atau dalam satu rangkuman nilai (range) tertentu[1] Suatu sistem kendalil otomatis
dalam suatu proses kerja berfungsi
mengendalikan proses tanpa adanya campur tangan manusia (otomatis)[2].
2.2.Sistem Kendali Tracking Sinar Matahari
Sistem kendali tracking sinar matahari adalah sebuah sistem yang berfungsi untuk mengendalikan posisi penampang dalam alat sistem kendali tracking sinar matahari dengan tujuan mengusahakan penampang selalu menghadap arah datangnya sumber cahaya[3].
90°
Pane l Surya
BARAT TIMUR
2.3.Panel Surya
Panel surya modern memiliki
perlindungan overheating yang baik dalam bentuk semen konduktif termal.
2.4.Sensor Cahaya LDR
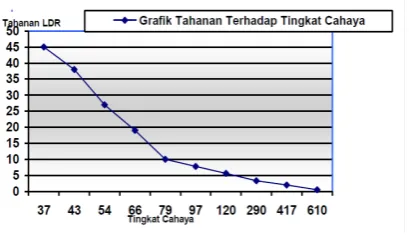
Sensor Cahaya LDR (Light Dependent Resistor) adalah jenis Resistor yang nilai hambatan atau nilai resistansinya tergantung pada intensitas cahaya yang diterimanya[6].
Gambar 2. Tahanan Sensor Cahaya LDR Terhadap Tingkat Cahaya
2.5.Motor DC
Motor DC adalah motor listrik yang memerlukan suplai tegangan arus searah pada kumparan medan untuk diubah menjadi energi gerak mekanik[5]. Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar).
2.6.Arduino Uno
Arduino terdiri dari dua bagian utama, yaitu board Arduino dan Arduino Integrated Development Environment (IDE). Board Arduino adalah sebuah hardware berbasis
mikrokonroler yang digunakan untuk
membangun sebuah objek. Sedangkan
Arduino IDE adalah sebuah software yang dijalankan pada komputer untuk membuat sebuah program yang akan di upload ke board Arduino yang biasa disebut dengan sketch[11].
2.7.Logika Fuzzy
Logika Fuzzy yang pertama kali diperkenalkan oleh Lotfi A. Zadeh, memiliki derajat keanggotaan dalam rentang 0 (nol) hingga 1 (satu), berbeda dengan logika digital yang hanya memiliki dua nilai yaitu 1 (satu) atau 0 (nol)[13].
Secara umum dalam sistem logika Fuzzy terdapat empat buah elemen dasar, yaitu:
1. Basis kaidah (rule base), yang berisi
aturan-aturan secara linguistik yang
bersumber dari para pakar.
2. Suatu mekanisme pengambilan keputusan
(inference engine), yang memperagakan bagaimana para pakar mengambil suatu
keputusan dengan menerapkan
pengetahuan (knowledge).
3. Proses fuzzifikasi (fuzzification), yang
mengubah besaran tegas (crisp)ke besaran Fuzzy.
4. Proses defuzzifikasi (defuzzification),
yang mengubah besaran Fuzzy hasil dari inference engine, menjadi besaran tegas (crisp).
3.
METODE PENELITIAN
Pada gambar di bawah ini dapat dilihat gambaran sistem yang dibuat.
Gambar 3. Rancangan Penelitian Deskripsi secara umum dalam sistem kendali tracking sinar matahari ini adalah dimulai dari tahapan pembacaan data
intensitas cahaya menggunakan sensor
untuk menentukan arah pergerakan motor agar posisi panel surya dapat tegak lurus terhadap arah datangnya sinar matahari.
Diagram blok sistem dapat dilihat pada gambar berikut :
Gambar 4. Diagram Blok Sistem
3.1.Flowchart Sistem
Rancangan flowchart untuk sistem kendali tracking sinar matahari yang akan dibuat dapat dilihat pada gambar berikut:
Gambar 5. Rancangan Flowchart Sistem Kendali Tracking Sinar Matahari
3.2.Perancangan Logika Fuzzy
Untuk merancang susatu logika fuzzy maka dilakukan beberapa tahapann sebagai berikut:
3.2.1.Fuzzifikasi
Langkah pertama dalam merancang suatu logika fuzzy adalah menentukan masukan dan keluaran fuzzy[10]. Dalam penelitian ini, masukan-masukan sistem berupa nilai error dan (delta)error. Berikut adalah fungsi keanggotaan dari masukan dan keluaran fuzzy:
Gambar 6. Rancangan Fungsi Keanggotaan Error
Gambar 7. Rancangan Fungsi Keanggotaan
ΔError
Gambar 8. Rancangan Fungsi Keanggotaan Keluaran Fuzzy
3.2.2.Mekanisme Inferensi (Rule Base)
Dengan crisp input dan crisp output dari masing-masing keluaran, maka dapat dibuat aturan atau rules sebanyak 9 aturan. Aturan-aturan tersebut dapat dilihat seperti pada tabel berikut :
Tabel 1. Rancangan Fuzzy Rule Base
3.2.3. Defuzifikasi
Pada proses ini variabel linguistik akan diubah kembali menjadi variabel angka yang
nantinya akan diproses menggunakan
penalaran fuzzy metode sugeno (centre of
gravity).
4.
HASIL DAN PEMBAHASAN
Sistem kendali tracking sinar matahari yang dibuat terdiri dari komponen utama, yaitu:
1. Rangkian sensor cahaya LDR
2. Mikrokontroler.
3. Motor DC gearbox dengan driver L298.
Gambar 9. Implementasi Sistem Kendali Tracking Sinar Matahari
4.1.Pengujian Sensor Cahaya LDR
Pengujian sensor cahaya LDR bertujuan untuk melihat perubahan nilai resistansi yang terjadi pada sensor. Masing-masing sensor diuji satu kali dalam satu jam dari jam 08.00 sampai dengan jam 18.00.
Tabel 2. Pengujian Sensor Cahaya LDR Arah Barat
Tabel 3. Pengujian Sensor Cahaya LDR Arah Timur
Hubungan antara peruhan nilai ADC terhadap waktu pengujian dapat dilahat pada gambar berikut:
Gambar 10. Perubahan Nilai ADC Sensor LDR terhadap Waktu
4.2.Pengujian dan Analisa Respon Sistem
Parameter yang perlu dianalisa pada pengujian respon sistem adalah sebagai berikut:
1. Settling Time, Waktu yang dibutuhkan untuk mencapai nilai akhir dari respon dan tetap berada pada nilai tersebut. 2. Steady State Errror, Perbedaan antara
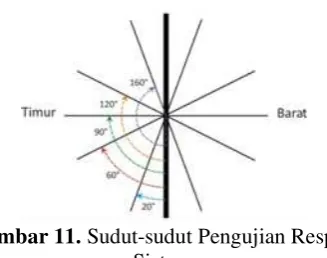
Gambar 11. Sudut-sudut Pengujian Respon Sistem
Setelah dilakukan pengujian terhadap analisa sistem berdasarkan beberapa kondisi secara keseluruhan. Maka didapatkanlah tabel perbandingan hasil uji coba analisa sistem seperti yang terlihat dari tabel berikut:
Tabel 4. Perbandingan Respon Sistem
Dari tabel 4 diatas dapat dilihat bahwa overshoot hanya terjadi pada kondisi sistem kendali harus mengendalikan panel surya menurun dari posisi sebelumnya contoh pada kondisi dari 90° menuju 60°. Pada kondisi tersebut panel surya digerakan turun dari kemiringan 90 derajat ke kemiringan 60 derajat dan terjadilah overshoot sebesar 88%. Sedangkan untuk kondisi panel surya digerakan naik tidak terjadi overshoot, seperti pada kondisi 20° menuju 60°.
4.3.Pengujian dan Analisa Panel Surya
Pengujian panel surya tanpa sistem kendali ini dilakukan dengan melakukan pengukuran terhadap tegangan keluaran yang dihasilkan oleh panel surya pada waktu-waktu yang telah ditentukan. Pengujian panel surya dilakukan selama 10 jam setiap harinya. Dimulai dari pukul 08.00 sampai dengan pukul 18.00.
4.4.Pengujian Panel Surya Tanpa Sistem
Kendali
Gambar 12. Ilustrasi Posisi Panel Surya Tanpa Sistem Kendali
4.5.Analisa Sistem Secara Keseluruhan
Untuk dapat melihat perbandingan rata-rata tegangan keluaran yang dihasilkan oleh panel surya dari keempat kondisi yang telah disebutkan diatas dapat pada tabel 5 berikut:
Tabel 5. Perbandingan Tegangan Keluaran Panel Surya
Berdasarkan hasil yang didapatkan diatas maka dapat di simpulkan bahwa nilai daya masukan yang paling maksimal didapat
dengan kondisi posisi panel surya
dikendalikan kearah datangnya sinar
matahari dengan selisih tegangan keluaran sebesar 0,71 volt jika dibangdingkan dengan posisi panel surya tanpa dikendalikan.
turut menghasilkan rata-rata tegangan keluaran sebesar 20,41 volt, 19,50 volt, dan 19,21 volt.
5.
KESIMPULAN
1. Settling time pada pengujian respon
sistem dipengaruhi oleh jarak yang dituju. settling time yang paling kecil adalah 0,4 dengan kondisi posisi panel surya dari 90° menuju 120°.
2. Overshoot pada sistem kendali hanya
terjadi saat panel surya pada kondisi menurun dengan overshoot paling besar terjadi pada saat posisi panel surya dari 90° ke 120° sebesar 156,67%. Hal ini dibebabkan oleh oleh berat beban yang tidak linear dan juga dipengaruhi oleh gravitasi bumi.
3. Rata-rata tegangan keluaran panel surya
yang dikendalikan mengarah kearah datangnya sinar matahari lebih besar
daripada panel surya yang tidak
dikendalikan dengan selisih sebesar 0,71 volt.
4. Rata-rata tegangan keluaran panel surya
lebih maksimal apabila mengarah
langsung kearah datangnya sinar matahari dibandingkan dengan sudut yang diatur 30°, dan sudut 60° terhadap arah penyinaran dengan nilai secara berturut-turut sebesar 20,41 volt, 19,50 volt, dan 19,21 volt.
6.
DAFTAR PUSTAKA
[1] Adriansyah, Andi. Dasar Sistem
Kontrol. Universitas Mercu Buana, Jakarta . 2010
[2] Ogata, K.. Teknik Kontrol Automatik, Jilid 1. Erlangga, Jakarta. 2001
[3] Raharjo, E. B.. Sistem Kendali Penjejak
Sinar Matahari Menggunakan
Mikrokontroler Atmega8535. , 1-8. 2003
[4] Indoenergi, 2012. Panel Surya, URL: http://www.indoenergi.com/2012/04/pen
gertian-panel-surya.html.Diakses pada
24 September 2014
[5] Sudiharto, Agus.. Penerapan Dasar
Transducer Dan Sensor. Kanisius,
Yogyakarta 2002
[6] Token, Light-Dependent Photoresistors for Sensor Application. TOKEN, 1-3 resistor/. Diakses pada 24 September 2014
[8] Artanto, Dian.. Yuk, Membuat Robot. PT. Grasindo , Jakarta 2012
[9] Robotshop, 2013, Motor DC, URL: http://www.Robot shop.com/en/motor-dc/. Diakses pada 24 September 2014 [10] Zhanggischan, , Prinsip Dasar Elektro
Teknik. PT. Gramedia Pustaka Utama, Jakarta 2004
[11] Arduino, 2012. Arduino Uno, URL:
http://arduino.cc /en/Main/. Diakses
pada 24 September 2014
[12] Corporation, Atmel. Datasheet
ATmega328, ATMEL, 1. 2009.
[13] Kusumadewi, Sri dan Hari, Purnomo..
Aplikasi Logika Fuzzy untuk
Pendukung Keputusan. Graha Ilmu, Yogyakarta 2010