LAPORAN
PENELITIAN HIBAH BERSAING
PROTOTIPE SISTEM PENGATUR ISYARAT LALU-LINTAS
ADAPTIF TERKOORDINASI UNTUK RUAS JALAN SENOPATI DAN
JALAN SULTAN AGUNG YOGYAKARTA
Tahun ke-1 dari rencana 3 tahun
Tim Pengusul:
Freddy Kurniawan, S.T., M.T. NIDN 0517037601 (Ketua) Denny Dermawan, S.T., M.Eng. NIDN 0011117101 (Anggota 1) Okto Dinaryanto, S.T., M.M., M.Eng. NIDN 0504107202 (Anggota 2)
Dibiayai oleh:
Dibiayai oleh Kopertis Wilayah V DIY Kementerian Pendidikan dan Kebudayaan
Sesuai dengan Surat Perjanjian Pelaksanaan Hibah Penelitian Nomor: 1372/K5/KM/2014
Tanggal 6 Mei 2014
iii
Salah satu ketidakefektifan pengatur lalu-lintas yang digunakan di ruas Jalan Senopati dan Jalan Sultan Agung Yogyakarta adalah tidak adanya sinkronisasi antara pengatur lalu-lintas di simpang empat Kantor Pos (Nol Kilometer), Gondomanan dan Bintaran. Hal ini dapat menimbulkan antrian panjang dan kemacetan. Sementara itu tidak adanya variasi waktu hijau juga menambah panjang antrian pada jam-jam sibuk, dan menjadikan adanya pemborosan waktu pada jam-jam sepi.
Salah satu solusi yang diajukan pada penelitian ini adalah digunakannya sistem pengatur lalu-lintas terkoordinasi yang mempunyai jadwal pewaktuan. Dengan sistem ini, sebagian besar kendaraan yang mendapat isyarat hijau di simpang empat Kantor Pos akan mendapat isyarat hijau setibanya di simpang empat Gondomanan, dan di simpang empat Bintaran; demikian pula sebaliknya.
Pengatur lalu-lintas di simpang empat Gondomanan bertindak sebagai master (master controller); sedangkan pengatur lalu-lintas di simpang empat Kantor Pos dan
Bintaran bertindak sebagai pengatur lalu-lintas lokal (local controller). Pengatur
lalu-lintas master mengirim data sinkronisasi ke kedua pengatur lalu-lalu-lintas lokal secara nirkabel. Semua pengatur lalu-lintas mempunyai jadwal pewaktuan lalu-lintas sendiri-sendiri yang telah disesuaikan dengan kondisi kepadatan lalu-lintas. Data pewaktuan tersebut didapat dari analisis atas hasil survei yang dilakukan selama 7 × 24 jam.
Semua pengatur lalu-lintas yang menggunakan mikrokontroler AVR ATmega128A ini telah dapat mengatur lalu-lintas sesuai jadwal pewaktuan dan secara terkoordinasi. Proses sinkronisasi hanya memerlukan waktu satu hingga beberapa siklus. Prediksi pergerakan kendaraan telah dibuat menjadi diagram trayektori kendaraan. Hasil analisis menunjukkan bahwa sistem ini dapat menurunkan waktu tempuh kendaraan hingga 40 %.
Program pengaturan lalu-lintas ini baru menggunakan tidak lebih dari 10 % ruang memori di mikrokontroler, baik memori flash, SRAM, maupun EEPROM. Siklus kerja CPU mikrokontroler juga baru di bawah 1%. Pengatur lalu-lintas ini masih dapat secara leluasa dikembangkan untuk ditambah sensor kamera sebagai pendeteksi jumlah antrian kendaraan.
iv
Puji syukur kami panjatkan ke hadirat Allah swt atas nikmat dan karunia-Nya
laporan penelitian hibah bersaing ini telah dapat kami selesaikan. Dengan telah
tersusunnya laporan ini, berarti penelitian hibah bersaing dengan judul “Prototipe
Sistem Pengatur Isyarat Lalu-Lintas Adaptif Terkoordinasi untuk Ruas Jalan Senopati
dan Jalan Sultan Agung Yogyakarta” untuk tahun pertama telah selesai dilaksanakan.
Diharapkan penelitian ini dapat dilanjutkan pada tahun kedua dengan target dapat
menggunakan kamera untuk membentuk sebuah sistem pengatur isyarat lalu-lintas
adaptif terkoordinasi.
Tim Peneliti mengucapkan terima kasih kepada Direktorat Pendidikan Tinggi
yang telah membiayai penelitian ini, STT Adisutjipto dan berbagai pihak yang telah
membantu terlaksananya penelitian ini. Peneliti menyadari bahwa laporan penelitian ini
masih jauh dari sempurna. Untuk itu segala kritik dan saran untuk kebaikan kita semua
sangat kami harapkan. Dan semoga hasil penelitian ini dapat bermanfaat bagi
pengembangan ilmu pengetahuan dan penentuan arah kebijakan pembangunan sistem
v
HALAMAN PENGESAHAN ... ii
RINGKASAN ... iii
PRAKATA ... iv
DAFTAR ISI ... v
DAFTAR TABEL ... vii
DAFTAR GAMBAR ... viii
DAFTAR LAMPIRAN ... ix
BAB 1 PENDAHULUAN ... 1
1.1 Latar Belakang dan Permasalahan ... 1
1.2 Perumusan Masalah ... 3
1.3 Urgensi Penelitian ... 4
BAB 2 TINJAUAN PUSTAKA ... 5
2.1 Pengaturan Isyarat Lalu-lintas Sinkron Adaptif ... 5
2.2 Penelitian untuk Memperbaiki Sistem Pengatur isyarat lalu-lintas ... 7
BAB 3 TUJUAN DAN MANFAAT PENELITIAN ... 9
3.1 Tujuan Penelitian ... 9
3.2 Manfaat Penelitian ... 9
BAB 4 METODE PENELITIAN ... 10
4.1 Pembentukan Prototipe Sistem Pengatur Lalu-lintas ... 11
A. Pengatur Lalu-lintas Berbasis Mikrokontroler ATmega128A ... 11
B. Terminal Operator ... 13
C. Mekanisme Pengaturan Lalu-lintas ... 14
4.2 Pembentukan Basis Data untuk Pewaktuan Pengaturan Lalu-lintas ... 15
4.3 Mekanisme Pengubahan Jadwal Pewaktuan Pengatur Lalu-lintas secara Nirkabel ... 18
A. Kode Header dan Telecommand ... 19
B. Test ... 20
C. Restart ... 20
D. Read Database ... 20
vi
B. Penentuan Nilai Offset ... 27
4.5 Penentuan Waktu Tempuh Kendaraan ... 28
BAB 5 HASIL DAN PEMBAHASAN ... 30
5.1 Penggunaan Sumber Data Mikrokontroler ... 30
5.2 Diagram Trayektori Kendaraan ... 31
5.3 Penjadwalan Ketiga pengatur lalu-lintas ... 32
5.4 Sinkronisasi Pewaktuan pengatur lalu-lintas ... 35
A. Sinkronisasi pada Transisi Dua Slot Waktu ... 35
B. Waktu Transisi ... 36
5.5 Waktu Tunggu Kendaraan pada Jam-jam Sibuk ... 38
5.6 Pengembangan Sistem ... 42
BAB 6 RENCANA TAHAPAN BERIKUTNYA ... 43
BAB 7 KESIMPULAN DAN SARAN ... 45
7.1 Kesimpulan ... 45
7.2 Saran ... 45
DAFTAR PUSTAKA ... 47
vii
Tabel 1. Arah setiap fase ... 14
Tabel 2. Jadwal pewaktuan untuk pengatur lalu-lintas master dan lokal ... 15
Tabel 3. Kode ASCII header untuk memulai pengiriman data ... 19
Tabel 4. Kode ASCII Telecommand ... 20
Tabel 5. Penggunaan memori dan sumber daya mikrokontroler ... 30
Tabel 6. Jadwal pewaktuan master dan lokal pada hari kerja ... 33
Tabel 7. Jadwal pewaktuan master dan lokal pada hari Sabtu ... 33
Tabel 8. Jadwal pewaktuan master dan lokal pada hari Minggu ... 34
Tabel 9. Waktu kuning dan pengosongan ... 34
Tabel 10. Perkiraan waktu tempuh kendaraan dengan pengatur lalu-lintas biasa ... 39
Tabel 11. Perkiraan waktu tempuh kendaraan dengan pengatur lalu-lintas terkoordinasi ... 40
viii
Gambar 1. Urutan isyarat lalu-lintas pada umumnya ... 5
Gambar 2. Dua pengatur lalu-lintas berdekatan ... 6
Gambar 3. Diagram fishbone penelitian ... 10
Gambar 4. Urutan kegiatan penelitian tahun I ... 11
Gambar 5. Blok diagram sistem pengatur isyarat lalu-lintas ... 12
Gambar 6. Diagram skema elektronis utama sebuah pengatur lalu-lintas ... 13
Gambar 7. Terminal operator. ... 13
Gambar 8. Diagram transisi keadaan pengaturan lalu-lintas ... 14
Gambar 9. Peta memori basis data jadwal pewaktuan pengatur lalu-lintas... 17
Gambar 10. Komunikasi antara terminal dengan pengatur lalu-lintas ... 18
Gambar 11. Mekanisme pelaksanaan perintah “Read Database” ... 22
Gambar 12. Proses sinkronisasi pengatur lalu-lintas lokal ... 24
Gambar 13. Urutan fase pada ketiga pengatur lalu-lintas ... 27
Gambar 14. Diagram trayektori kendaraan pada jam-jam sibuk ... 32
Gambar 15. Sinkronisasi pengatur lalu-lintas lokal ... 35
Gambar 16. Fluktuasi nilai siklus untuk mencapai kondisi sinkron ... 36
Gambar 17. Perubahan nilai siklus untuk nilai ξ berbeda ... 37
Gambar 18. Grafik waktu transisi versus galat offset ... 38
ix
Lampiran 1 Instrumen Penelitian
Lampiran 2 Personalia Tenaga Peneliti beserta Kualifikasinya
Lampiran 3 Naskah Publikasi Ilmiah
a. Naskah Publikasi Ilmiah 1: “Pre-Timed and Coordinated Traffic
Controller Systems Based on AVR Microcontroller”
akan dimuat di Jurnal Ilmiah Terakraditasi A dan Internasional
terindeks Scopus “Telkomnika”, Vol. 12, No. 4, Desember 2014.
b. Naskah Publikasi Ilmiah 2: “Sistem Pengatur Lalu-lintas Terjadwal
dan Terkoordinasi untuk Persimpangan Gondomanan, Kantor Pos,
dan Bintaran”
akan disampaikan dalam Seminar Nasional Rekayasa Teknologi
Industri dan Informasi (ReTII) ke-9 Tahun 2014 pada tanggal 13-14
1
1.1 Latar Belakang dan Permasalahan
Kemacetan lalu-lintas merupakan fenomena yang sering terjadi di Kota
Yogyakarta. Kemacetan tersebut biasanya berupa antrian panjang kendaraan di
beberapa pengatur lalu-lintas pada jam-jam sibuk. Menurut Walikota Yogyakarta yang
dikutip Harian Jogja (2012), pemerintah kota belum memiliki konsep yang disepakati
bersama untuk mengurai kemacetan dan mengantisipasi ancaman kemacetan total pada
2015. Banyak kerugian yang didapat dari kemacetan, di antaranya adalah: waktu
tempuh menjadi lebih tinggi, pemborosan waktu dan bahan bakar, dan memperbesar
biaya perawatan kendaraan. Dari hasil penelitian Imam Basuki dan Siswandi (2008)
didapat bahwa kerugian akibat kelambatan arus lalu-lintas di Jl. Gejayan lebih dari 11
juta rupiah per jam. Kerugian yang terjadi di ruas Jl. Senopati dan Jl. Sultan Agung
tentunya lebih besar, karena pada ruas jalan tersebut lebih banyak dilalui kendaraan dan
terdapat lebih banyak pengatur lalu-lintas.
Salah satu penyebab kemacetan adalah tidak optimalnya pewaktuan atau
waktu setiap isyarat sebuah pengatur lalu-lintas. Di sepanjang ruas Jl. Senopati dan Jl.
Sultan Agung tersebut terdapat tiga pengatur lalu-lintas, yaitu di persimpangan Kantor
Pos, Gondomanan, dan Bintaran. Ketiga pengatur lalu-lintas tersebut masih
menggunakan pewaktuan mandiri (stand alone) dan bersifat tetap (fixed time setting).
Pada jam-jam sibuk, waktu isyarat hijau tidak dapat memberi kesempatan semua
kendaraan dalam antrian untuk berjalan; sementara itu pada malam hari, waktu isyarat
hijau menjadi terlalu lama karena jumlah kendaraan yang lewat sangat sedikit.
Pengatur lalu-lintas di persimpangan Kantor Pos dan Gondomanan telah
dilengkapi ATCS (Area Traffics Control System). Dengan sistem ini, kondisi lalu-lintas
di persimpangan tersebut dapat dimonitor dari kantor Dinas Perhubungan melalui
sebuah kamera CCTV (Hanggara, 2012). Namun kamera tersebut hanya sebatas
memantau keadaan (monitoring) dan tidak memberikan kontribusi terhadap pewaktuan
pengatur lalu-lintas. Petugas pemantau harus aktif mengatur pewaktuan di kedua
pengatur lalu-lintas masih cenderung bersifat tetap karena hampir tidak pernah
diubah-ubah oleh petugas.
Salah satu solusi untuk mengatasi hal tersebut adalah menjadikan data jumlah
kendaraan yang ditangkap kamera memberikan kontribusi pada pewaktuan pengatur
lalu-lintas sehingga menjadi pengatur lalu-lintas adaptif. Waktu isyarat hijau
disesuaikan dengan jumlah dan panjang antrian kendaraan yang ada. Pada sebuah
pengatur lalu-lintas adaptif harus terdapat mesin untuk menghitung data kepadatan dan
panjang antrian kendaraan. pengatur lalu-lintas juga harus mempunyai pola dan jadwal
pengaturan dan waktu setiap isyarat. Jadwal pengaturan akan dijalankan jika sensor
kamera tidak bekerja dengan baik, terjadi kerusakan pada mesin penghitung, atau data
panjang antrian yang didapat dari sensor dinyatakan tidak sah (invalid). Sesuai dengan
perubahan pola kepadatan lalu-lintas, jadwal pengaturan tersebut harus berlaku 24 jam
per hari selama 7 hari per minggu. Untuk memudahkan pengoperasian, jadwal harus
dapat diubah melalui ATCS.
Penyebab lain terjadinya kemacetan adalah tidak adanya koordinasi pewaktuan
pengatur lalu-lintas pada persimpangan yang berdekatan (Primantari, 2010). Tidak
terkoordinasinya pewaktuan dua pengatur lalu-lintas berdekatan menyebabkan tidak
pastinya waktu tempuh kendaraan pada ruas jalan di antara dua pengatur lalu-lintas
tersebut. Sebagian besar kendaraan dari sebuah pengatur lalu-lintas dapat langsung
mendapat isyarat hijau pada pengatur lalu-lintas berikutnya, namun di waktu lain
mendapatkan isyarat merah. Jika sebagian besar kendaraan mendapatkan isyarat merah
setibanya di pengatur lalu-lintas berikutnya, maka akan terjadi antrian panjang
kendaraan. Pada kondisi inilah akan banyak waktu terbuang dan dapat menimbulkan
kemacetan. Kondisi ini juga menyebabkan kendaraan lebih banyak melakukan
pengereman untuk berhenti di setiap isyarat merah, dan menggunakan lebih banyak
bahan bakar untuk menjalankan kembali kendaraan pada saat isyarat hijau. Hal ini tentu
akan menaikkan biaya perawatan dan konsumsi bahan bakar kendaraan.
Solusi menyeluruh yang diajukan pada penelitian ini adalah digunakannya
Sistem Pengatur Isyarat Lalu-Lintas adaptif terkoordinasi. Sistem ini terdiri dari tiga
pengatur lalu-lintas terkoordinasi yang dapat diterapkan di persimpangan Kantor pos,
Gondomanan, dan Bintaran. Dengan sistem ini diharapkan sebagian besar kendaraan di
lalu-lintas akan mendapat isyarat hijau, atau setidaknya tidak terlalu lama menanti isyarat
hijau saat tiba di pengatur lalu-lintas berikutnya.
Sistem pengatur lalu-lintas modern di negara maju pada umumnya berbasis
prosesor 32 bit dan dikoordinasi oleh sistem komputer yang bertindak sebagai server
(FHWA, 2008). Sementara itu, pengatur lalu-lintas di Indonesia saat ini pada umumnya
berbasis mikrokontroler MCS-51. Dikarenakan keterbatasan kecepatan CPU dan
memori mikrokontroler tersebut, sangat kecil kemungkinan dibentuk sistem pengatur
lalu-lintas terjadwal dan terkoordinasi ini menggunakan mikrokontroler tersebut.
Pada penelitian ini, dibentuklah sistem pengatur lalu-lintas terjadwal dan
terkoordinasi berbasis mikrokontroler AVR ATmega128A. Dengan menggunakan
jadwal pewaktuan yang disimpan di EEPROM internal mikrokontroler tersebut,
diharapkan sistem ini dapat mengatur lalu-lintas secara terjadwal mengikuti volume
kendaraan harian dan terkoordinasi. Sistem ini diharapkan dapat secara efektif
menurunkan kemacetan kendaraan yang sering terjadi.
1.2 Perumusan Masalah
Penelitian ini dilakukan dengan membentuk prototipe sistem pengatur isyarat
lalu-lintas adaptif terkoordinasi yang dapat diterapkan di persimpangan: Kantor Pos,
Gondomanan, dan Bintaran. Sistem ini harus memenuhi kriteria berikut:
1. mempunyai jadwal pewaktuan isyarat hijau optimum untuk 7 × 24 jam,
2. waktu hijau suatu setiap arah dapat diubah melalui sebuah terminal operator secara
nirkabel,
3. sistem dapat dikembangkan lebih lanjut dengan penambahan beberapa pengatur
lalu-lintas lain.
Penggunaan sistem ini diharapkan dapat menurunkan waktu tempuh dan
konsumsi bahan bakar kendaraan yang melaju dari persimpangan Kantor Pos hingga
Bintaran dan sebaliknya. Untuk mewujudkan gagasan tersebut, terdapat beberapa
permasalahan yang harus diselesaikan dalam penelitian ini, yaitu:
1. Bagaimana membentuk prototipe pengatur lalu-lintas untuk persimpangan Kantor
Pos, Gondomanan, dan Bintaran?
2. Bagaimana membentuk basis data yang berisi jadwal pewaktuan yang dapat
3. Bagaimana mekanisme pengubahan jadwal pewaktuan ketiga pengatur lalu-lintas
secara nirkabel?
4. Bagaimana mekanisme sinkronisasi sistem pengatur lalu-lintas terkoordinasi ini?
5. Berapa waktu transisi untuk tercapai kondisi sinkron?
6. Berapa penurunan waktu tempuh kendaraan jika digunakan sistem ini?
1.3 Urgensi Penelitian
Keberhasilan penelitian ini diharapkan dapat menurunkan waktu tempuh
kendaraan pada ruas jalan Senopati dan Sultan Agung, khususnya pada ruas jalan
antara persimpangan Kantor Pos, Gondomanan, dan Bintaran. Untuk mendapatkan
waktu tempuh dan konsumsi bahan bakar minimum, maka tindakan pengeraman dan
melakukan akselerasi kendaraan harus dikurangi. Untuk itu, sebelum tiba di suatu
pengatur lalu-lintas, pengemudi harus mendapat informasi terlebih dahulu apa yang
harus dikerjakan, berhenti di isyarat merah atau akan segera mendapat isyarat hijau.
Untuk meminimalkan waktu tempuh dan konsumsi bahan bakar kendaraan, pengemudi
harus diberi keputusan bahwa kendaraan akan segera mendapat lampu hijau saat tiba di
suatu pengatur lalu-lintas (Dobre, 2012).
Keberadaan sistem ini untuk memperlancar lalu-lintas kendaraan akan lebih
optimal didukung oleh sistem ATCS yang telah diterapkan di persimpangan Kantor Pos
dan Gondomanan. Sistem ini dapat dikembangkan lebih lanjut dengan menambah
beberapa pengatur lalu-lintas adaptif lain, misalnya: di persimpangan Pasar Sentul, di
simpang tiga Jalan Sultan Agung dengan Jalan Jagalan, serta pengatur lalu-lintas untuk
penyeberangan pejalan kaki di depan Taman Pintar. Sistem ini pun dapat diaplikasikan
di beberapa persimpangan lain di kota Yogyakarta atau pun kota-lota lain. Lebih jauh
lagi, data kepadatan kendaraan yang didapat dari sistem ini dapat dijadikan masukan
bagi sistem ITS (Intelligent Transportation System) yang saat ini sedang dikembangkan
5
2.1 Pengaturan Isyarat Lalu-lintas Sinkron Adaptif
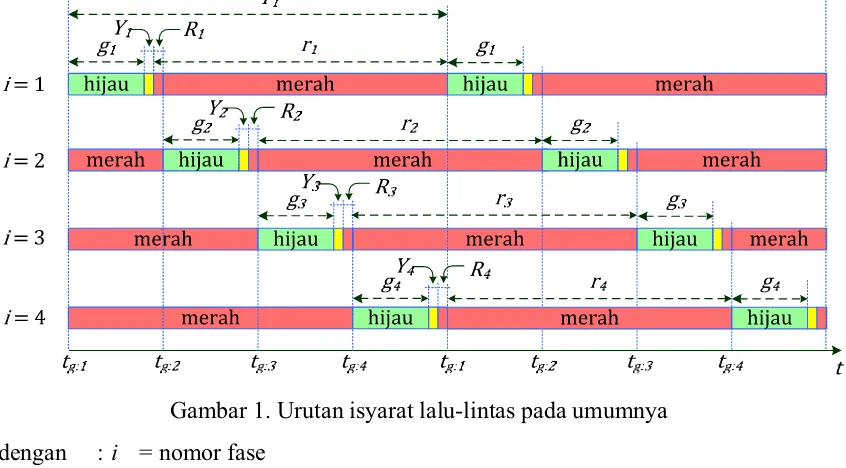
Pada umumnya, di suatu persimpangan dengan empat fase (i) untuk empat
arah kedatangan, isyarat hijau digilir menurut urutan dan periode siklus tertentu
sebagaimana Gambar 1 (Dresner dan Stone 2007).
Gambar 1. Urutan isyarat lalu-lintas pada umumnya
dengan : i = nomor fase
gi = waktu hijau fase i
Yi = waktu kuning fase i
Ri = waktu pengosongan antara isyarat kuning fase i dengan merah fase i+1
ri = waktu merah arah ke-i
C = periode
th:i = waktu dimulainya isyarat hijau arah ke-i
Periode siklus pengatur isyarat lalu-lintas (C) merupakan hasil penjumlahan
dari waktu merah (r), kuning (Y) dan hijau (g) suatu arah. Periode dapat dihitung
menggunakan Persamaan (1).
ܥ ൌ σସୀଵ݃ ܻ ܴ (1)
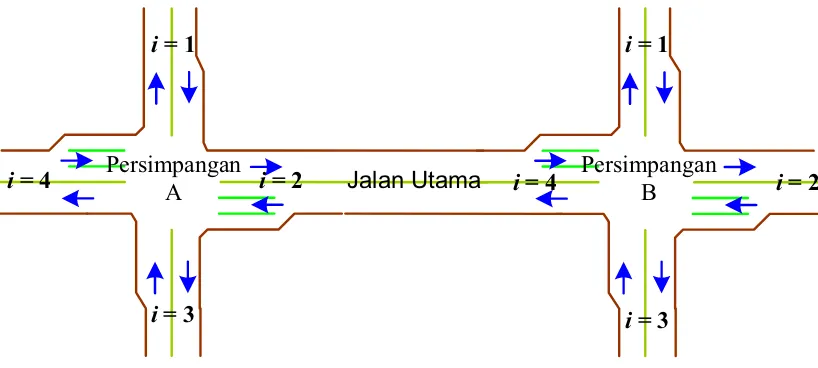
Pada sebuah jalan utama, untuk dua pengatur lalu-lintas berdekatan
mendapat isyarat hijau setibanya di pengatur lalu-lintas B, maka isyarat hijau untuk
arah 4 pengatur lalu-lintas B harus mengikuti Persamaan (2).
Gambar 2. Dua pengatur lalu-lintas berdekatan
ݐସǤ ൌ ݐସǤ ݐ՜ (2)
dengan :
ݐସǤ = waktu dimulainya isyarat hijau fase 4 pengatur lalu-lintas di persimpangan B
ݐସǤ = waktu dimulainya isyarat hijau fase 4 pengatur lalu-lintas di persimpangan A
՜ = waktu tempuh kendaraan dari pengatur lalu-lintas A ke pengatur lalu-lintas B
Sebaliknya, agar sebagian besar kendaraan dari pengatur lalu-lintas B
mendapat isyarat hijau setibanya di pengatur lalu-lintas A, maka isyarat hijau untuk
arah 2 pengatur lalu-lintas A harus mengikuti Persamaan (3).
ݐଶǤ ൌ ݐଶǤ ݐ՜ (3)
ݐଶǤ = waktu dimulainya isyarat hijau fase 2 pengatur lalu-lintas di persimpangan A
ݐଶǤ = waktu dimulainya isyarat hijau fase 2 pengatur lalu-lintas di persimpangan B
ݐ՜ = waktu tempuh kendaraan dari pengatur lalu-lintas B ke pengatur lalu-lintas A
Fungsi adaptasi dapat ditambahkan pada pengatur lalu-lintas terkoordinasi.
Perubahan kepadatan yang tidak terlalu besar di suatu pengatur lalu-lintas tidak perlu
mengubah periode siklus kedua pengatur lalu-lintas. Sehingga penambahan waktu hijau
dari suatu arah kedatangan cukup diimbangi dengan pengurangan waktu hijau dari arah
lain. Namun perubahan kepadatan yang cukup besar pada suatu pengatur lalu-lintas
dapat mengubah periode siklus kedua pengatur lalu-lintas, sehingga kedua pengatur
lalu-lintas harus menentukan ulang waktu hijau setiap arahnya. Persimpangan
A
Persimpangan B
i= 1
i= 2
i= 3
i= 4 i= 2
i= 3
i= 4
i= 1
2.2 Penelitian untuk Memperbaiki Sistem Pengatur isyarat lalu-lintas
Pada tahun 2007, telah dibuat konsep sistem pengatur isyarat lalu-lintas
sinkron adaptif. Pada sistem tersebut, isyarat hijau diatur sedemikian rupa sehingga
sebagian besar kendaraan yang melaju di arah utama akan langsung mendapat isyarat
hijau atau tidak terlalu lama menanti isyarat hijau. Dari simulasi sistem tersebut dalam
MATLAB terbukti bahwa penerapan sistem tersebut dapat mengurangi waktu tempuh
kendaraan yang melaju di ruas utama (Kurniawan dan Adiprasetya, 2007).
Pada tahun berikutnya telah dibuat rancangan pendeteksi kendaraan dengan
metal detector (Sulaeman dkk, 2008), pengendalian menggunakan logika fuzzy (Taufik dkk, 2008), dan sensor antrian kendaraan untuk ruas jalan di Indonesia (Zulfikar dan
Adria, 2011). Pada tahun 2011, Afif dkk. telah membuat prototipe pengatur lalu-lintas
terdistribusi. Pada sistem ini digunakan sebuah kamera untuk mendeteksi keberadaan
kendaraan. Data gambar diterima oleh mesin yang terdiri dari sebuah SBC dengan
mikroprosesor ARM. Sebuah laptop dengan prosesor Core 2 Duo 2,5 GHz digunakan
untuk menjalankan program untuk mengenali dan menghitung jumlah kendaraan
dengan metode Principal Component Analysis (PCA). Peneliti lain menggabungkan
metode Pyramid Histograms of Oriented Gradients (PHOG) dengan PCA (Khairdoost
at al., 2013). Sistem kemudian menentukan waktu setiap isyarat lalu lintas
menggunakan metode Distributed Constraint Satisfaction Problem (DCSP). Metode
lain untuk membagi waktu hijau di setiap arah adalah menggunakan jaringan syaraf
(Zaman dkk., 2011)
Di negara maju, banyak pula penelitian yang telah dilakukan untuk
meningkatkan kinerja sistem pengatur lalu-lintas, baik secara terkoordinasi maupun
mandiri (stand-alone). Fazli (2012) telah memperkenalkan pengklasifikasian kendaraan
dengan menggunakan jaringan syaraf untuk membentuk sistem pengatur lalu-lintas
cerdas. Askerzade et. al. (2010) dan Khan et. al. (2014) mencoba
mengimplementasikan sebuah pengolah citra dan kendali logika kabur (fuzzy). Langkah
ini kemudian mengirim hasil pengolahan tersebut ke sebuah mikrokontroler untuk
mengatur isyarat lalu-lintas yang diharapkan.
Penelitian untuk mengembangkan sistem pengatur isyarat lalu-lintas
terkoordinasi juga telah dikembangkan. Sebagaimana telah dikemukakan oleh Dotoli
dengan melakukan sinkronisasi isyarat lalu-lintas pada beberapa persimpangan yang
dikoordinasi. Kemudian Shamshirband (2008) telah memperkenalkan strategi
pembobotan sebagai salah satu metode koordinasi. Xie et. al. (2012) membentuk sistem
koordinasi yang terjadwal untuk kendali isyarat lalu-lintas secara waktu nyata (real
time), dan pada tahun 2012 Shamshirband kembali mengembangkan pengendalian
isyarat lalu-lintas menggunakan pendekatan pembelajaran Q (Q-learning) dari sistem
syaraf.
Beberapa penelitian yang dilakukan di Indonesia juga telah dilakukan.
Penelitian tersebut menggunakan karakteristik lalu-lintas di Indonesia. Pada tahun
2010, Primantary membentuk sebuah model koordinasi pengaturan isyarat lalu-lintas.
Pada tahun yang sama Jatmiko dkk. membentuk sebuah arsitektur kendali isyarat
lalu-lintas terdesentralisasi untuk situasi riil termasuk di persimpangan yang tidak
terstruktur di Jakarta.
Sementara itu, Rachmadi dkk. (2012) juga telah dapat mendeteksi kepadatan
kendaraan dari sensor kamera dengan mencari perbedaan data citra yang ada dengan
data citra latar belakang. Dari data titik-titik yang mempunyai perbedaan cukup
signifikan dengan data titik untuk jalan, dapat ditentukan kepadatan kendaraan yang
berada pada jalan tersebut. Zhu (2013) telah membuat sistem pendeteksian kendaraan
yang sedang bergerak menggunakan pendeteksian sisi horisontal dan auto korelasi.
Dengan metode ini dimungkinkan terdeteksinya dua kendaraan yang terekam kamera
dalam poisisi saling tumpang tindih. Dan pada tahun 2014, Kurniawan juga telah
membuat prototipe sistem pengatur isyarat lalu-lintas terkoordinasi untuk simpang
9
3.1 Tujuan Penelitian
Penelitian yang dilakukan di tahun pertama dari tiga tahun dalam skema hibah
bersaing ini mempunyai tujuan sebagai berikut.
1. Membuat prototipe pengatur lalu-lintas untuk persimpangan Kantor Pos,
Gondomanan, dan Bintaran
2. Membentuk basis data yang berisi jadwal pewaktuan yang dapat digunakan untuk
pengaturan lalu-lintas.
3. Membuat mekanisme pengubahan jadwal pewaktuan ketiga pengatur lalu-lintas
secara nirkabel.
4. Membuat mekanisme sinkronisasi sistem pengatur lalu-lintas untuk membentuk
sistem pengatur lalu-lintas terkoordinasi.
5. Menghitung waktu transisi untuk tercapai kondisi sinkron.
6. Menghitung penurunan waktu tempuh kendaraan jika digunakan sistem ini.
3.2 Manfaat Penelitian
Penelitian ini dibuat dengan beberapa manfaat berupa luaran sebagai berikut:
1. Produk ilmu pengetahuan dan teknologi yaitu prototipe sistem pengatur lalu-lintas
terkoordinasi yang dapat mengatur lalu-lintas sesuai jadwal yang terdiri dari tiga
pengatur lalu-lintas untuk persimpangan Kantor Pos, Gondomanan, dan Bintaran.
2. Publikasi ilmiah dalam jurnal internasional terindeks Scopus dan terakreditasi A
“Telkomnika” dengan judul: “Pre-Timed and Coordinated Traffic Controller
Systems Based on AVR Microcontroller”.
3. Prosiding seminar nasional RETII (Rekayasa Teknilogi Industri dan Informasi)
dengan judul: “Sistem Pengatur Lalu-lintas Terjadwal dan Terkoordinasi untuk
10
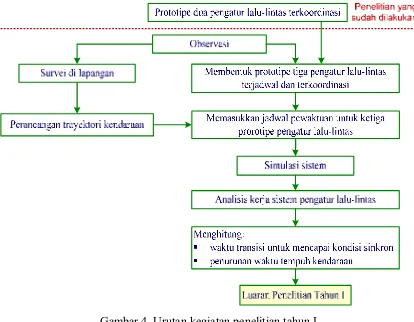
Penelitian ini dilakukan dengan mengembangkan hasil dari penelitian
sebelumnya yaitu prototipe dua pengatur lalu-lintas terkoordinasi dengan beberapa
variasi pewaktuan di setiap pengatur lalu-lintas (Penelitian Dosen Pemula, 2013).
Kegiatan penelitian ini di antara beberapa penelitian sebelumnya dapat peta jalan (road
map) penelitian yang diilustrasikan dalam bentuk diagram fishbonepada Gambar 3.
Gambar 3. Diagram fishbone penelitian
Kegiatan penelitian ini berlokasi di ruas Jalan Senopati dan Jalan Sultan
Agung, Yogyakarta, yaitu di persimpangan Kantor Pos, Gondomanan, dan Bintaran.
Desain rangkaian hingga pembuatan prototipe sistem dilakukan di Laboratorium
Elektronika STT Adisutjipto. Kegiatan pertama yang dilakukan adalah observasi ke
lapangan untuk menentukan deskripsi teknis ketiga persimpangan. Observasi juga
dilakukan ke PT. Qumicom dan Dinas Perhubungan Yogyakarta. Urutan kegiatan
penelitian pada tahun pertama ini dapat dilihat pada Gambar 4.
Survei dilakukan untuk menentukan:
panjang antrian kendaraan selama menanti lampu hijau,
waktu hijau terbaik agar semua kendaraan dalam antrian tepat habis
waktu tempuh kendaraan yang berjalan di antara ketiga pengatur lalu-lintas
berdekatan
Prototipe Sistem Pengatur Lalu-Lintas Adaptif Terkoordinasi
Pengatur lalu-lintas terkoordinasi
(2010)
Prototipe SPILL terjadwal, terkoordinasi
dan adaptif (tahun II: 2015)
Prototipe SPILL adaptif terkoordinasi
terintegrasi ATCS (tahun III) Prototipe SPILL
terjadwal dan terkoordinasi (tahun I: 2014)
Prototipe dua APILL terkoordinasi
(2013) Penelitian pengatur
lalu-lintas dengan logika fuzzy
(2008)
Simulasi pengatur lalu-lintas adaptif sinkron
(2008)
Penggunaan kamera untuk mendeteksi kepadatan kendaraan
(2011)
Penelitian lanjutan yang akan dilakukan Penelitian yang telah dilakukan sebelumnya
Penelitian tahun I hibah bersaing
Gambar 4. Urutan kegiatan penelitian tahun I
4.1 Pembentukan Prototipe Sistem Pengatur Lalu-lintas
A. Pengatur Lalu-lintas Berbasis Mikrokontroler ATmega128A
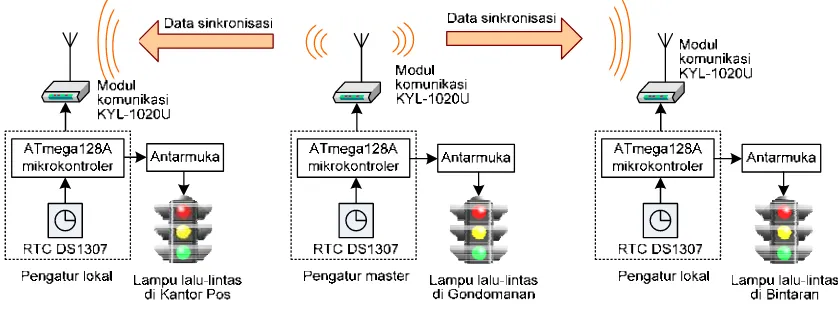
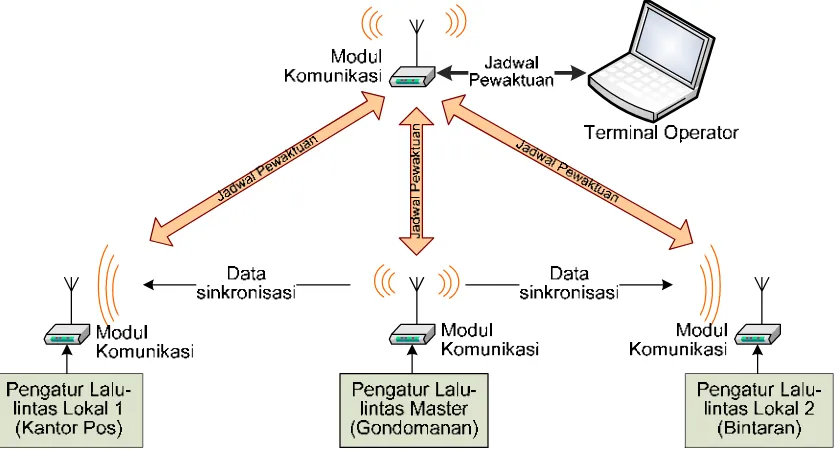
Sistem terdiri dari tiga buah pengatur isyarat lalu-lintas sebagaimana Gambar
5. Sebuah pengatur lalu-lintas bertindak sebagai pengatur lalu-lintas master dan dua
pengatur lalu-lintas lain bertindak sebagai pengatur lalu-lintas lokal. Pengatur master
mewakili pengatur lalu-lintas di persimpangan Gondomanan; sedangkan pengatur lokal
1 dan 2 mewakili pengatur di Kantor Pos dan Bintaran.
Sebagaimana telah digunakan peneliti-peneliti sebelumnya, sistem ini
menggunakan pendekatan sistem terdistribusi (distributed system) untuk membentuk
koordinasi pewaktuan untuk pengaturan isyarat lalu-lintas. Setiap pengatur lalu-lintas
dapat bertindak sebagai pengatur lalu-lintas mandiri (stand-alone) maupun pengatur
lalu-lintas terkoordinasi. Setiap pengatur lalu-lintas mempunyai semua komponen yang
dibutuhkan untuk pengaturan isyarat lalu-lintas di sebuah simpang empat, seperti CPU,
basis data yang berisi data pewaktuan isyarat lalu-lintas yang akan diterapkan untuk
mengatur lalu-lintas di sebuah persimpangan selama 7 × 24 jam.
Gambar 5. Blok diagram sistem pengatur isyarat lalu-lintas
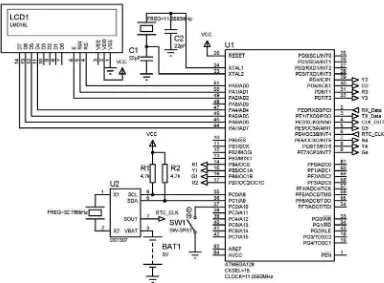
Gambar 6 memperlihatkan diagram skematik dasar sebuah pengatur
lalu-lintas. Sebuah pengatur lalu-lintas mempunyai komponen utama sebuah mikrokontroler
ATmega128A. Mikrokontroler ini terdiri dari sebuah CPU RISC 8 bit, memori flash
128 kB, SRAM 4 kB, dan EEPROM 4 kB. Mikrokontroler ini dijalankan pada
frekuensi clock 11,0592 MHz. Algoritma pengatur isyarat lalu-lintas
diimplementasikan ke dalam program yang ditulis dalam bahasa C menggunakan
CodeVision AVR 2.05.3 Edisi Standar. Program ini disimpan di memori flash
mikrokontroler. Agar ruang memori dan beban komputasi dapat dihemat, semua
variabel diformat dalam integer 8 atau 16 bit dan semua perhitungan matematis
dibentuk menggunakan operasi integer.
Sebuah RTC DS1307 digunakan untuk memberikan data waktu ke
mikrokontroler. Setiap detik, mikrokontroler membaca data waktu dari RTC ini.
Operator dapat memperbarui data waktu di RTC dengan data waktu di terminal secara
nirkabel.
Setiap pengatur lalu-lintas juga mempunyai tampilan berupa penampil LCD 2
× 16 karakter. Penampil ini menampilkan data isyarat setiap fase dan hitungan mundur
(counter down). Penampil ini juga menampilkan proses komunikasi yang terjadi antara pengatur lalu-lintas dengan terminal operator, misalnya pembacaan dan pengunduhan
Gambar 6. Diagram skema elektronis utama sebuah pengatur lalu-lintas
Terminal dan setiap pengatur lalu-lintas menggunakan modul komunikasi
nirkabel KY-1020U. Modul tersebut dapat mentransmisikan data secara half-duplex
pada frekuensi 433 MHz. Pada modul tersebut digunakan modulasi Frequency Shift
Keying (FSK). Dengan modul tersebut pengatur master mengirim data sinkronisasi ke kedua pengatur lokal, dan dengan modul tersebut terminal operator dapat membaca dan
mengunduh basis data di setiap pengatur lalu-lintas.
B. Terminal Operator
Terminal operator terdiri dari sebuah laptop dan modul komunikasi
sebagaimana Gambar 7. Laptop berisi program Traffic Management Center. Program
ini dibuat agar operator dapat memasukkan basis data yang berisi jadwal pewaktuan
semua pengatur lalu-lintas. Sedangkan modul komunikasi berisi modul
transmiter/receiver KYL-1020U dan konverter USB-Serial PL2303.
Operator dapat membuat dan mengedit basis data yang berisi jadwal
pewaktuan pengatur lalu-lintas di Gondomanan (master), pengatur lalu-lintas di Kantor
Pos (lokal 1), dan pengatur lalu-lintas di Bintaran (lokal 2), dan mengunduh basis data
tersebut ke setiap pengatur lalu-lintas secara nirkabel. Operator juga dapat membaca
jadwal pengaturan setiap pengatur lalu-lintas.
C. Mekanisme Pengaturan Lalu-lintas
Penelitian ini difokuaskan pada isyarat lalu-lintas pada tiga buah pengatur
lalu-lintas di persimpangan Kantor Pos, Gondomanan, dan Bintaran. Pengaturan isyarat
lalu-lintas dilakukan dengan urutan tertentu dan bersifat tetap sesuai Tabel 1.
Tabel 1. Arah setiap fase
Fase (P) Gondomanan Kantor Pos Bintaran
1 utara ke semua utara ke barat
selatan ke timur selatan ke semua
2 timur ke semua utara ke semua utara ke semua
3 selatan ke semua barat ke semua timur ke semua
4 barat ke semua barat ke timur
timur ke barat barat ke semua
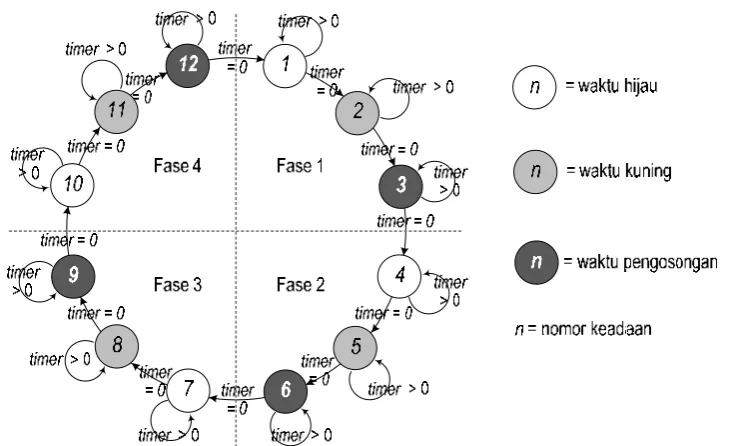
Pengatur lalu-lintas bekerja berdasarkan pewaktu (timer) yang akan
memberikan giliran isyarat hijau pada arah sesuai Tabel 1. Dalam satu periode dari fase
1 hingga fase 4 dinamakan dengan satu siklus. Pada sebuah siklus terdapat dua belas
keadaan (state) sebagaimana Gambar 8.
Perubahan dari sebuah keadaan ke keadaan berikutnya hanya terjadi pada saat
pewaktu di mikrokontroler telah bernilai nol. Transisi dari keadaan 12 ke keadaan 1
didefinisikan sebagai akhir sebuah siklus. Pada saat itu, CPU mikrokontroler membaca
kembali data waktu pada RTC. Selanjutnya CPU mencari data waktu hijau di basis data
yang harus diterapkan pada siklus berikutnya.
Setiap pengatur lalu-lintas dapat dioperasikan pada mode trace. Pada mode ini,
pada saat terjadi transisi dari suatu keadaan ke keadaan berikutnya, mikrokontroler
mengirim data ke terminal oparator secara nirkabel. Data tersebut berisi nomor keadaan
dan waktu saat itu dalam format jam:menit:detik.
4.2 Pembentukan Basis Data untuk Pewaktuan Pengaturan Lalu-lintas
Jadwal pewaktuan pengaturan lalu-lintas untuk setiap persimpangan
dimasukkan ke EEPROM mikrokontroler di setiap pengatur. Jadwal yang berlaku
untuk waktu 7 × 24 jam tersebut berisi waktu dimulai sebuah slot waktu (hhi:mmi),
waktu hijau setiap fase (gj,i), waktu kuning (Yi), dan waktu pengosongan (Ri)
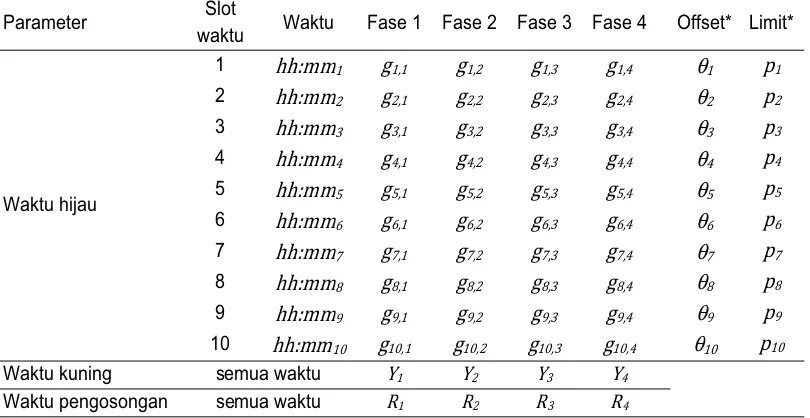
sebagaimana Tabel 2.
Tabel 2. Jadwal pewaktuan untuk pengatur lalu-lintas master dan lokal
Parameter Slot
waktu Waktu Fase 1 Fase 2 Fase 3 Fase 4 Offset* Limit*
Waktu hijau
1 ǣͳ ͳǡͳ ͳǡʹ ͳǡ͵ ͳǡͶ θͳ ͳ
2 ǣʹ ʹǡͳ ʹǡʹ ʹǡ͵ ʹǡͶ θʹ ʹ
3 ǣ͵ ͵ǡͳ ͵ǡʹ ͵ǡ͵ ͵ǡͶ θ͵ ͵
4 ǣͶ Ͷǡͳ Ͷǡʹ Ͷǡ͵ ͶǡͶ θͶ Ͷ
5 ǣͷ ͷǡͳ ͷǡʹ ͷǡ͵ ͷǡͶ θͷ ͷ
6 ǣ ǡͳ ǡʹ ǡ͵ ǡͶ θ
7 ǣ ǡͳ ǡʹ ǡ͵ ǡͶ θ
8 ǣͺ ͺǡͳ ͺǡʹ ͺǡ͵ ͺǡͶ θͺ ͺ
9 ǣͻ ͻǡͳ ͻǡʹ ͻǡ͵ ͻǡͶ θͻ ͻ
10 ǣͳͲ ͳͲǡͳ ͳͲǡʹ ͳͲǡ͵ ͳͲǡͶ θͳͲ ͳͲ
Waktu kuning semua waktu ͳ ʹ ͵ Ͷ
Waktu pengosongan semua waktu ͳ ʹ ͵ Ͷ
* hanya untuk pengatur lalu-lintas lokal
Satu hari dibagi menjadi sepuluh slot waktu; sementara itu dalam satu minggu
disediakan tiga jadwal yang dapat digunakan untuk hari-hari kerja (Senin-Jumat), Sabtu
dan Minggu. Parameter gj,i merupakan waktu hijau untuk slot waktu j fase i. Nilai gj,i
pada slot waktu j tersebut pengatur lalu-lintas tidak akan mengatur lalu-lintas dan hanya memberikan isyarat kuning berkedip.
Nilai Yi merupakan nilai waktu kuning berlangsung; sedangkan nilai Ri
merupakan nilai waktu jeda antara diakhirinya isyarat kuning fase i dengan dimulainya
isyarat merah fase berikutnya. Keduanya bernilai tetap untuk seluruh slot waktu.
Nilai siklus pada slot waktu j (ܥ) merupakan penjumlahan dari nilai waktu
hijau ditambah waktu kuning dan pengosongan untuk semua fase sesuai Persamaan (4).
ܥ ൌ σସୀଵ݃ǡ ܻ ܴ (4)
Menurut dokumen FHWA, semakin tinggi volume kendaraan, maka nilai
siklus juga mestinya semakin tinggi (FHWA, 2008). Nilai maksimal pada sistem ini
adalah 255 detik. Agar kedua pengatur lokal dapat bekerja secara sinkron, dalam slot
waktu yang sama pengatur master dan lokal dapat mempunyai waktu hijau berbeda,
namun harus mempunyai siklus yang sama (FHWA, 2008).
Jadwal pengatur lokal berisi tambahan data offset dan koefisien adaptasi.
Offset șj adalah perbedaan antara waktu dimulainya isyarat hijau fase 1 di pengatur
master dengan waktu dimulainya isyarat hijau fase 1 di pengatur lokal pada slot waktu
j. Sedangkan koefisien adaptasi pj adalah nilai persentasi perubahan maksimal atas total
waktu hijau semua fase pengatur lokal pada slot waktu j untuk melakukan sinkronisasi
pewaktuan pengatur lokal terhadap pengatur master. Offset dapat bernilai dari nol
hingga. Sedangkan koefisien adaptasi dapat bernilai 0 hingga 99. Nilai pj = 0 berarti
pada slot waktu j pengatur local tidak disinkronkan dengan pengatur master.
Nilai waktu kuning (Yi) dan pengosongan (Ri) untuk fase i bernilai tetap untuk
seluruh slot waktu. Nilai tersebut dibatasi untuk kisaran 0 hingga 15 detik. Seluruh nilai
parameter dalam jadwal menggunakan format bilangan integer 8 bit; dan seluruh
perhitungan yang dilakukan pada sistem ini juga menggunakan operasi matematis atas
bilangan bulat 8 dan 16 bit (integer operation).
Nilai waktu hijau, kuning, pengosongan, dan offset dimasukkan ke EEPROM
mikrokontroler setiap pengatur lalu-lintas melalui sebuah perangkat lunak Traffic
Management Centre. Perangkat tersebut dibuat dalam bahasa pemrograman Pascal
menggunakan Borland Delphi 7. Nilai-nilai tersebut merupakan nilai ekfetif yang
4.3 Mekanisme Pengubahan Jadwal Pewaktuan Pengatur Lalu-lintas secara
Nirkabel
Jadwal pewaktuan di pengatur lalu-lintas master dan lokal yang disimpan di
terminal operator dapat diunduh secara nirkabel ke semua pengatur lalu-lintas tersebut.
Jadwal tersebut disimpan dalam suatu basis data yang memuat data pada Jadwal
pewaktuan pengaturan lalu-lintas untuk setiap persimpangan dimasukkan ke EEPROM
mikrokontroler di setiap pengatur. Jadwal yang berlaku untuk waktu 7 × 24 jam
tersebut berisi waktu dimulai sebuah slot waktu (hhi:mmi), waktu hijau setiap fase (gj,i),
waktu kuning (Yi), dan waktu pengosongan (Ri) sebagaimana Tabel 2.
Tabel 2Jadwal untuk 7 × 24 jam untuk ketiga pengatur lalu-lintas juga
disimpan di laptop operator terminal. Sebuah program Traffic Management Centre
dapat digunakan operator untuk mengubah jadwal pewaktuan ketiga pengatur
lalu-lintas secara nirkabel. Program tersebut akan mengirim telemommand ke setiap
pengatur lalu-lintas agar mengirim jadwal ke terminal, selanjutnya operator dapat
mengedit jadwal, dan kemudian program akan mengunduh kembali jadwal pewaktuan
ke setiap pengatur lintas. Komunikasi antara terminal dengan setiap pengatur
lalu-lintas dapat dilihat pada Gambar 10.
Gambar 10. Komunikasi antara terminal dengan pengatur lalu-lintas
Untuk membentuk sistem komunikasi data yang handal antara setiap pengatur
lalu-lintas dengan terminal operator, maka dibentuklah protokol komunikasi yang
sebaliknya. Protokol tersebut juga digunakan agar data dapat diterima oleh perangkat
yang berhak menerima dan untuk menjamin bahwa data diterima dengan benar.
Protokol juga akan menjamin kerja setiap pengatur tidak dapat diintervensi oleh data
yang dibangkitkan oleh pihak lain. Protokol ini telah dimasukkan ke Program Traffic
Management Centre di terminal operator dan ke program pengatur isyarat lalu-lintas di pengatur master maupun lokal.
Salah satu hal yang diatur pada protokol tersebut adalah kode header untuk
komunikasi antara ketiga pengatur lalu-lintas dan antara setiap pengatur dengan
terminal operator.
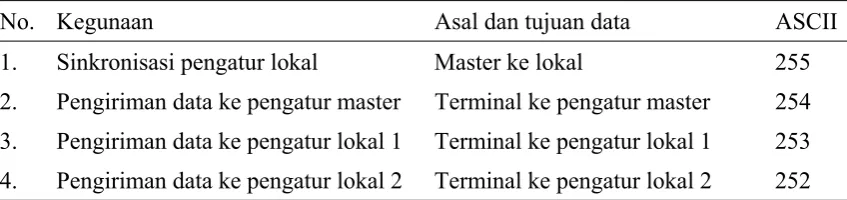
A. Kode Header dan Telecommand
Setiap komunikasi dimulai dengan sebuah data header 8 bit. Hal ini
dimaksudkan agar setiap data mempunyai alamat tujuan data. Data header setiap jenis
komunikasi mengikuti Tabel 3.
Tabel 3. Kode ASCII header untuk memulai pengiriman data
No. Kegunaan Asal dan tujuan data ASCII
1. Sinkronisasi pengatur lokal Master ke lokal 255
2. Pengiriman data ke pengatur master Terminal ke pengatur master 254
3. Pengiriman data ke pengatur lokal 1 Terminal ke pengatur lokal 1 253
4. Pengiriman data ke pengatur lokal 2 Terminal ke pengatur lokal 2 252
Terminal dapat mengirim perintah (telecomand) kepada setiap pengatur
lalu-lintas. Telecomand berfungsi untuk memerintahkan sebuah pengatur lalu-lintas untuk
menjalankan suatu prosedur tertentu, baik prosedur pengolahan data internal maupun
prosedur untuk melakukan komunikasi dengan terminal. Perintah tersebut didahului
dengan data header untuk menentukan alamat pengatur lalu-lintas yang diperintah.
Semua perintah diwujudkan dengan kode ASCII sesuai Tabel 4.
Sebagai contoh, perintah pengetesan keaktifan pengatur lalu-lintas master
adalah kode ASCII 254 dan 251, dan pengunduhan waktu ke pengatur lalu-lintas lokal
Tabel 4. Kode ASCII Telecommand
No. Kegunaan ASCII Yang harus dilakukan pengatur lalu-lintas
1. Pengetesan pengatur
lalu-lintas
251 Membalas dengan kode ASCII 251
2. Pengunduhan basis data 250 Menyimpan data yang akan diterima berikut
ke basis data
3. Pembacaan basis data
di pengatur lalu-lintas
249 pengatur lalu-lintas mengirim basis data ke
terminal
4. Penyimpanan basis data
ke EEPROM
248 pengatur lalu-lintas menyalin basis data di
SRAM ke EEPROM
5. Pembacaan waktu
pengatur lalu-lintas
247 pengatur lalu-lintas mengirim data waktu ke
terminal dalam format jam-menit-detik-hari-tanggal-bulan-tahun.
6. Pengunduhan waktu
pengatur lalu-lintas
246 menyimpan data yang diterima berikutnya
dalam format jam-menit-detik-hari-tanggal-bulan-tahun.
7. Pembaruan waktu
pengatur lalu-lintas
245 memperbarui waktu di RTC dengan data
waktu yang telah diterima.
8. Restart 244 menjalankan program pengaturan isyarat
lalu-lintas dari awal pada saat dihidupkan
9. Pembacaan basis data
dari EEPROM
243 menyalin basis data dari EEPROM ke
SRAM
10. Akhir basis data 242 kode bahwa data terakhir basis data telah
diterima
B. Test
Perintah ini digunakan untuk mengetes keaktifan sebuah pengatur lalu-lintas.
Sebuah pengatur lalu-lintas akan membalas dengan kode Test jika diberikan perintah
ini. pengatur lalu-lintas juga akan menampilkan pesan “Communication test” di layar
LCD selama maksimal 1 detik.
C. Restart
Perintah ini digunakan untuk menjalankan program pengatur lalu-lintas dari
awal sebagaimana proses reboot pada sebuah computer. Data waktu tidak akan tereset
oleh perintah ini.
D. Read Database
Perintah ini digunakan untuk membaca basis data pada sebuah pengatur
yang berisi jadwal pewaktuan ke terminal. Selanjutnya operator dapat membaca dan
mengedit jadwal tersebut di laptop operator. Operasi ini membutuhkan waktu hampir 2
detik. Agar data dapat terkirim secara benar secara nirkabel dengan pesat bit 9600 bps,
dibentuklah mekanisme pengiriman basis data mengikuti Algoritma 1.
Algoritma 1: Pembacaan basis data sebuah pengatur lalu-lintas
1: Dzdz
2: ሺ̴ൌͷͲͲሻ
3: Dzdzǡͷ
4: ̴ǡ
5: ͳͲ
6: Dz dz
7: ͳͷ
8: Dzdz
9: ሺ̴ൌʹሻ
10: Dzdz
11: ൌ ǡͳͶ
12: ͳͺǡͺ
13: Dzdz
14: ሺ̴ൌʹሻ
15: Dzͳdz
16: ൌ ǡͳͻ
17: ͳͺǡͳ͵
18: Dzdz്Dzͳdzǡͺ
19: DzdzǦ
Sesuai dengan algoritma tersebut, proses pembacaan data dari pengatur
lalu-lintas master dapat dilihat pada Gambar 11. Langkah pertama algoritma tersebut adalah
mengirim header untuk pengatur lalu-lintas master (254) dan diikuti dengan kode “test”
(251). Setiap frame data menggunakan format 8 bit data, 1 bit start dan 1 bit stop.
Dengan pesat bit (bit rate) komunikasi adalah 9600 bps, maka sepasang data 8 bit
tersebut membutuhkan waktu pengiriman 2,1 milidetik.
Jika pengatur lalu-lintas master aktif, maka pengatur lalu-lintas tersebut akan
membalas dengan informasi pemberitahuan (acknowledgement) kode “test” (251).
Pengatur lalu-lintas juga akan menampilkan pesan “Communication test”. Subrutin
untuk menampilka pesan ini dieksekusi dalam waktu sekitar 8,6 milidetik. Sebuah
pewaktu internal akan membatasi waktu diterimanya data “test” dari sebuah pengatur
lalu-lintas sebesar 500 milidetik. Jika dalam waktu itu tidak ada balasan dari pengatur
Gambar 11. Mekanisme pelaksanaan perintah “Read Database”
Setelah terminal menerima data “test”, pada langkah 5 pewaktu internal
menunda proses berikutnya selama 10 milidetik. Hal ini untuk memberi kesempatan
pengatur lalu-lintas siap kembali menerima data. Selanjutnya pada langkah 6 terminal
memerintahkan pengatur lalu-lintas untuk menyalin basis data di EEPROM ke SRAM
dengan cara mengirim telecommand “copy database from EEPROM to SRAM”.
Setelah menerima perintah ini, pengatur lalu-lintas akan menyalin basis data dari
EEPROM ke SRAM mikrokontroler. Waktu yang diperlukan adalah 10,4 milidetik.
Selanjutnya pada langkah 8 terminal memerintahkan pengatur lalu-lintas untuk
mengirim basis data di SRAM ke terminal dengan cara mengirim telecomand “send
database to terminal”. Instruksi ini dilaksanakan 15 milidetik setelah telecomand
sebelumnya. Hal ini untuk memberi kesempatan pengatur lalu-lintas untuk selesai
mengerjakan perintah sebelumnya (menyalin basis data dari EEPROM ke SRAM).
Setelah pengatur lalu-lintas menerima perintah mengirim basis data ke
terminal, maka CPU menampilkan pesan “Send database” sebagai indikator adanya
pengiriman basis data ke terminal. Basis data dari pengatur lalu-lintas dikirim ke
terminal secara nirkabel per byte dengan interval waktu 10 milidetik. Adanya interval
Operator Terminal Traffic Controller
Data header
Send 185th data Send 1st data
Send EOF data EOF data
Send telecommand: “copy database from EEPROM to SRAM”
Master Controller Header + Test
Acknowledge Reply an “acknowledge”
Send telecommand: “send database
to terminal”
Master Controller Header + Telecommand: send database to terminal
Display
“Communication test”
Copy data from EEPROM to SRAM
Receive 1st data then save them to an array of data
Receive 185th data then save them to an array of data
Receive EOF data
waktu tersebut digunakan agar memberi kesempatan program Traffic Management
Centre untuk menerima dan menyimpan setiap data yang diterima dengan benar.
Pengiriman 187 data (termasuk header dan End Of File, EOF) pada sebuah
basis data membutuhkan waktu 1870 milidetik. Sebuah pewaktu internal 2000 milidetik
akan membatasi lama proses pengiriman basis data ini. Jika hingga milidetik ke-2000,
terminal belum menerima data EOF, maka pengiriman basis data dianggap mengalami
kesalahan dan terminal akan kembali memerintahkan pengatur lalu-lintas untuk
mengirim basis data kembali (langkah 11).
Untuk lebih memastikan bahwa setiap data pada basis data diterima dengan
benar, maka pengatur lalu-lintas diminta mengirim basis data dua kali. Langkah 13
merupakan usaha terminal untuk mengirim telecomand ke pengatur lalu-lintas untuk
mengirim basis data kembali. Basis data yang telah diterima kali pertama (“data”) dan
kali ke dua (“data1”) selanjutnya dibandingkan. Jika keduanya sama, maka basis data
yang diterima dianggap benar, dan segera ditampilkan ke layar operator. Namun jika
tidak, maka terminal akan memerintahkan pengatur lalu-lintas untuk mengirim basis
datanya kembali (langkah 18).
E. Pengunduhan Basis Data
Perintah ini digunakan untuk memerintahkan terminal mengunduh basis data
dari laptop terminal ke sebuah pengatur lalu-lintas. Agar setiap data di basis data dapat
diunduh secara benar ke sebuah pengatur lalu-lintas, maka dibentuklah Algoritma 2
untuk pengunduhan basis data dari terminal ke sebuah pengatur lalu-lintas.
Algoritma 2: Pengunduhan basis data ke sebuah pengatur lalu-lintas
1: Dzdz
2: ሺ̴ൌͷͲͲሻ
3: DzdzǡͶ
4: ̴ǡ
5: ͳͲ
6: Dz dz
7: ͳͷ
8: ͳͲǤ
9: ͳሺ Ǧ
ሻ
10: Dzdz്ǡǤ
Proses pembaruan basis data di setiap pengatur lalu-lintas dilakukan dengan
cara pengiriman basis data dari terminal ke sebuah pengatur. Pengatur akan menyimpan
basis data tersebut ke SRAM mikrokontroler. Kemudian terminal membaca kembali
basis data tersebut dengan cara mengirim telecommand ke pengatur untuk mengirim
kembali basis data tersebut. Seperti pada Algoritma 1, pengatur akan mengirim basis
data dua kali.
Setelah kedua basis data diterima, terminal akan membandingkan kedua basis
data tersebut. Jike kedua telah sama, maka terminal akan membandingkan basis data
yang diterima dengan basis data yang tadi dikirim ke pengatur tersebut. Jika telah sama,
maka terminal mengirim telecommand ke pengatur untuk menyalin basis datanya dari
SRAM ke EEPROM mikrokontroler.
4.4 Mekanisme Sinkronisasi Sistem Pengatur Lalu-lintas
A. Sinkronisasi Pewaktuan Pengatur Lalu-lintas Lokal
Agar semua pengatur lalu-lintas dapat sinkron, pada setiap akhir sebuah siklus,
pengatur lalu-lintas master mengirim data sinkronisasi sebagaimana Gambar 12. Ketika
menerima data tersebut, pengatur lalu-lintas lokal membaca kembali data waktu dari
RTC, kemudian menyimpan waktu pada saat data sinkronisasi diterima sebagai .
Gambar 12. Proses sinkronisasi pengatur lalu-lintas lokal
Kemudian pada saat akhir siklus pengatur lalu-lintas lokal
, pengaturlalu-lintas lokal mengeksekusi Algoritma 3. Algoritma tersebut digunakan untuk
mensinkronkan pewaktuan pengatur lalu-lintas lokal terhadap pengatur lalu-lintas
Algoritma 3: Sinkronisasi pewaktuan pengatur lalu-lintas lokal terhadap pengatur lalu-lintas master
1: ݐൌ ̴
2: ܩ ൌ σସୀଵ݃
3: ܩ௧ ൌ Ǥ ܩ
4: ɅԢ ൌ ݐெെ ݐ
5: [ൌ ɅԢ െ T
6: [ൌͲ[ܥ
7: [Ͳͳ͵
8: Ɍ ܩ௧ǡɌ ൌ ܩ௧
9: '݃ ൌ σరసభൈ Ɍ
10: Ɍ ൌ Ɍ െ σସୀଵο݃
11: Ɍ՜'݃
12: ൌͳͶ݃ ൌ ݃'݃
13:
14: Ɍ ൏Ȃ ܩ௧ǡߦ ൌȂ ܩ௧
15: '݃ ൌ σరసభൈ Ɍ
16: Ɍ ൌ Ɍ െ σସୀଵο݃
17: Ɍ՜'݃
18: ൌͳͶ݃ ൌ ݃െ'݃
19:
Algoritma tersebut dimulai dengan membaca data waktu dari RTC (langkah
pertama) dan menyimpannya di variabel integer 16 bit
. Kemudian, pada langkahke-2, dihitunglah yaitu nilai total waktu hijau untuk semua fase saat itu. Langkah
berikutnya adalah menghitung yang merupakan nilai maksimum perubahan
pada sebuah siklus. Parameter ini digunakan untuk mencegah adanya waktu hijau
yang terlalu lama atau terlalu singkat selama proses sinkronisasi. Jika suatu saat
pengatur lalu-lintas lokal harus menggunakan nilai lebih besar daripada , maka
proses sinkronisasi harus dilakukan dalam waktu lebih dari satu siklus. Nilai
didapat dengan mengalikan parameter dengan parameter , dengan adalah nilai
dengan kisaran dari 0 hingga 99 persen. Jika diisi dengan nol berarti pengatur
lalu-lintas lokal tidak disinkronkan dengan pengatur lalu-lalu-lintas master.
Baris ke-4 Algoritma 3 digunakan untuk menghitung offset saat ini atau θ’.
Paramater ini ditentukan dengan mengukur perbedaan waktu antara akhir siklus
pengatur lalu-lintas master (ݐெ) dan akhir siklus pengatur lalu-lintas local (ݐ). Nilai θ’
θ’ sama dengan nilai offset yang tersimpan di basis data (θ), berarti pewaktuan
pengatur lalu-lintas lokal telah sinkron dengan pewaktuan pengatur lalu-lintas master.
Jika tidak maka algoritma tersebut akan menjadikan pewaktuan kedua pengatur
lalu-lintas menjadi sinkron dengan menjadikan nilai offset berikutnya menjadi sama dengan
nilai offset yang tersimpan di basis data.
Sinkronisasi pewaktuan dilaksanakan dengan menggeser akhir maju atau
mundur siklus lokal sebagaimana Gambar 12. Program pengaturan isyarat lalu-lintas ini
dapat diatur agar sinkronisasi dilakukan dengan menggeser akhir siklus lokal maju,
atau mundur. Operator juga dapat mengatur agar program menentukan sendiri, mana
proses sinkronisasi yang paling cepat, menggeser maju atau menggeser mundur. Kasus
1 pada Gambar 12 merupakan contoh sebuah pewaktuan pengatur lalu-lintas lokal yang
telah disinkronkan dengan pewaktuan pengatur lalu-lintas master.
Pada baris 5 Algoritma 3, perbedaan antara nilai θǯ and θ
ξ. Jika nilai ξ lebih kecil dari nol, maka nilai
terlalu awal. Ini berarti akhir siklus pengatur lalu-lintas lokal terjadi lebih awal dari semestinya. Jika ini terjadi, makabaris 8 – 12 akan menggeser maju nilai
. Langkah ini ditempuh dengan menetapkannilai siklus berikutnya menjadi lebih panjang. Proses sinkronisasi pewaktuan pengatur
lalu-lintas lokal dengan menggeser maju nilai
dapat dilihat pada kasus 2 Gambar 12.Jika nilai ξ lebih besar dari nol, maka nilai
terlambat. Ini berarti akhir siklus pengatur lalu-lintas lokal terjadi terlambat dari semestinya. Jika ini terjadi, maka baris14 – 18 akan menggeser mundur nilai
. Langkah ini ditempuh dengan menetapkannilai siklus berikutnya menjadi lebih pendek. Proses sinkronisasi pewaktuan pengatur
lalu-lintas lokal dengan menggeser mundur nilai
dapat dilihat pada kasus 3 Gambar12.
Ketika program telah menentukan bahwa nilai
akan digeser mundur, bariske-9 Algoritma 1 akan mendistribusikan penambahan waktu hijau secara proporsional
ke semua fase. Semakin tinggi nilai waktu hijau suatu fase, maka penambahan nilai
waktu hijau (Δgi) akan semakin besar sebagaimana baris 9 Algoritma 3. Persamaan
pada baris tersebut dihitung dengan mengalikan terlebih dahulu nilai
݃
danɌ
. Hasilperkalian yang disimpan dalam variabel integer 16 bit kemudian dibagi dengan nilai
bulat. Bagian bilangan bulat dari hasil pembagian merupakan perubahan nilai waktu
hijau (Δhi); sementara itu sisa hasil bagi didistribusikan untuk menambahkan waktu
hijau pada beberapa fase. Penambahan ini dilakukan dimulai dari dari fase yang
mempunyai nilai waktu hijau terbesar. Proses penggeseran mundur
ini diakhiridengan langkah ke-12 yang akan menentukan nilai waktu hijau yang akan digunakan
untuk siklus berikutnya.
Langkah ke-14 hingga ke-18 digunakan untuk menggeser maju nilai
dengancara mengurangi nilai waktu hijau untuk beberapa fase pada siklus berikutnya. Metode
ini hampir sama dengan proses penggeseran mundur nilai
. Namun jika pengurangannilai waktu hijau menghasilkan nilai waktu hijau yang kurang dari nilai minimal waktu
hijau (Gmin), maka pengurangan waktu hijau akan dihentikan. Ini berarti nilai
pengurangan waktu hijau menjadi lebih kecil dari semsetinya. Dalam kasus ini
kemungkinan proses sinkronisasi belum dapat menghasilkan kondisi sinkron. Jika ini
terjadi, maka proses sinkronisasi kembali akan dikerjakan pada siklus berikutnya
hingga kondisi sinkron terjadi.
B. Penentuan Nilai Offset
Setiap pengatur lalu-lintas mempunyai 4 fase. Urutan fase mengikuti Gambar
13. Urutan fase untuk pengatur lalu-lintas di Gondomanan mengikuti arah jarum jam,
sedangkan urutan fase di Kantor Pos mengikuti urutan fase yang digunakan saat ini.
Sedangkan urutan fase di pengatur lalu-lintas Bintaran mengalami perubahan agar
pewaktuan di pengatur lalu-lintas tersebut dapat disinkronkan dengan pewaktuan
pengatur lalu-lintas di Gondomanan.
Gambar 13. Urutan fase pada ketiga pengatur lalu-lintas
Titik referensi untuk sinkronisasi adalah di akhir fase 4. Untuk mewujudkan
sinkronisasi, di akhir fase 4 ini, pengatur master mengirim data sinkronisasi kepada
N
semua pengatur lokal secara nirkabel. Pengatur lokal menerima data ini dan mencatat
waktu saat data diterima sebagai tM. Selanjutnya di akhir fase 4 siklus pengatur lokal tL,
setiap pengatur lokal mengubah waktu hijau untuk satu siklus berikutnya agar nilai
ofset berikutnya (ș’) yaitu selisih antara tM dan tL akan sama dengan nilai ofset yang
ada di slot waktu saat itu (ș).
Dari Gambar 13 tersebut terlihat bahwa fase 4 pengatur lalu-lintas di Kantor
Pos (P4.KP) dapat disinkronkan dengan fase 4 pengatur di Gondomanan (P4.G)
sehingga kendaraan yang telah mandapat isyarat hijau di fase 4 pengatur di Kantor Pos
langsung mendapat isyarat hijau di fase 4 pengatur di Gondomanan.
Sebagaimana Persamaan (2), untuk mencapai kondisi sinkron, P4.G harus
berlangsung sesudah P4.KP sehingga Persamaan (2) diubah menjadi Persamaan (5).
ݐସǤீ ൌ ݐସǤ ݐ՜ீ (5)
dengan ݐ՜ீ adalah waktu tempuh kendaraan dari persimpangan kantor Pos
ke Gondomanan.
Dikarenakan pangatur lalu-lintas di persimpangan Gondomaman bertindak
master, maka pewaktuan pengatur lalu-lintas di Kantor Pos-lah yang harus mengikuti
pewaktuan pengatur di Godomanan. Persamaan (5) diubah manjadi Persamaan (6)
berikut.
ݐସǤ ൌ ݐସǤீെ ݐ՜ீ (6)
Persamaan (3) berarti ݐସǤ berlangsung ݐ՜ீ detik sebelum ݐସǤீ.
Persamaan tersebut tidak dapat direalisasikan dalam pemrograman karena ݐସǤ baru
dapat ditentukan pada saat ݐସǤீ. Untuk itu, data sinkronisasi yang dikirim pengatur
master saat ini digunakan untuk mensinkronkan pewaktuan pada siklus berikutnya.
Berlangsungnya fase 4 di Kantor Pos mengikuti persamaan (7).
ݐସǤ ൌ ݐସǤீ ܥെ ݐ՜ீ (7)
Ketertinggalan P4.KP atas P4.G merupakan offset pewaktuan pengatur
lalu-lintas lokal 1 di Kantor Pos atas pengatur master di Gondomanan. Nilai offset (ș)
mengikuti Persamaan (8).
ߠ ൌ ܥെ ݐ՜ீ (8)
4.5 Penentuan Waktu Tempuh Kendaraan
Waktu tempuh kendaraan dari persimpangan Kantor Pos hingga persimpangan
persimpangan ditambah dengan waktu tunggu kendaraan untuk mendapat isyarat hijau
di setiap mulut persimpangan.
Antrian panjang kendaraan biasanya terjadi pada jam-jam sibuk. Slot waktu 7
merupakan salah satu waktu terjadi kemacetan. Kadang beberapa kendaraan di mulut
timur persimpangan Gondomanan dan mulut barat persimpangan Bintaran harus
menunggu isyarat hijau hingga dua siklus.
Jika digunakan pengatur tidak terkoordinasi, maka kedatangan kendaraan
merupakan fungsi acak. Kendaraan dapat datang kapan saja di suatu mulut
persimpangan. Di asumsikan waktu hijau dapat membuat tepat semua kendaaran dalam
antrian dapat berjalan. Waktu tunggu kendaraan untuk mendapat isyarat hijau pada fase
i dapat menjadi minimum (߱) yaitu bernilai nol jika kendaraan tersebut datang pada
saat tepat pengatur mulai memberikan isyarat hijau. Namun jika kendaraan datang pada
saat tepat pengatur mulai memberikan isyarat merah, maka waktu tunggu kendaraan
tersebut menjadi maksimal. Waktu tunggu maksimum pada fase i mengikuti dapat
dihitung dengan mengurangi waktu siklus dengan waktu hijau fase tersebut
sebagaimana Persamaan (9).
30
5.1 Penggunaan Sumber Data Mikrokontroler
Prototipe sistem telah dapat mengatur lalu-lintas sesuai jadwal pengaturan.
Pewaktuan pengatur lokal 1 dan lokal 2 juga telah dapat disinkronkan dengan
pewaktuan pengatur master. Basis data yang berisi jadwal pengaturan juga telah dapat
dibaca oleh oparator terminal. Operator juga dapat mengubah basis data dan
mengunduhnya kembali ke setiap pengatur lalu-lintas.
Program pengatur isyarat lalu-lintas di pengatur lalu-lintas master hanya
menggunakan 8574 byte (6,5 %) dari ruang memori flash dan 271 byte (6,2 %) dari
ruang SRAM. Sedangkan penggunaan ruang memori flash dan SRAM di pengatur
lalu-lintas lokal sedikit lebih besar karena terdapat algoritma sinkronisasi. Namun
sesungguhnya, program pengatur isyarat lalu-lintas ini hanya menggunakan sekitar 1,5
% ruang SRAM. Ruang sebesar 4,7 % SRAM hanya digunakan pada saat terjadi
penyalinan data dari basis data ke terminal dan sebaliknya. Sementara itu, basis data
yang berisi Jadwal pewaktuan untuk 7 × 24 jam di pengatur lalu-lintas master hanya
menempati 4,8 % ruang EEPROM. Basis data di pengatur lalu-lintas lokal menempati
ruang sedikit lebih tinggi dikarenakan adanya tambahan data pembatas p dan nilai
offset.
Tabel 5. Penggunaan memori dan sumber daya mikrokontroler
Tipe Memori Kapasitas (Byte)
Digunakan
Master Lokal (Byte) (%) (Byte) (%) Flash 131072 8574 6.5 10914 8.3
SRAM 4351 271 6.2 337 7.7
EEPROM 4096 192 4.7 252 6.2
Secara umum, pada saat CPU hanya membutuhkan waktu 10 milidetik untuk
mengeksekusi algoritma pengaturan isyarat lalu-lintas. Algoritma ini dieksekusi setiap
satu detik. Dengan demikian, siklus kerja CPU hanya seditar ଵ
ଵ ×100 % = 1%. Dari
fakta ini, dapat disimpulkan bahwa sistem ini dapat dikembangkan secara lebih leluasa
dengan menambah algoritma lain untuk melengkapi fasilitas pada pengatur isyarat
5.2 Diagram Trayektori Kendaraan
Berdasar analisis atas data hasil survei, aliran kendaraan di persimpangan
Kantor Pos, Gondomanan, dan Bintaran mempunyai pola tertentu. Dengan jarak antara
persimpangan Gondomanan dan Bintaran sekitar 360 meter sebagaimana Gambar 13.
Kendaraan yang melalui ruas jalan tersebut akan cenderung mempunyai pola.
Sementara itu, jarak antara persimpangan Kantor Pos dan Gondomanan sekitar 440
meter. Kendaraan yang melalui ruas tersebut juga mempunyai pola. Namun pola
kendaraan di ruas jalan tersebut kadang agak kabur karena terganggu oleh aktifitas
penyeberangan jalan di ruas jalan tersebut, terutama penyeberang jalan di depan Taman
Pintar.
Berdasar hasil survei kedatangan kendaraan pada ketiga persimpangan
mengikuti pola sebagai berikut.
1. Kendaraan yang datang ke mulut barat persimpangan Gondomanan sebagian besar
berasal dari isyarat hijau fase 3 (P3) dan sebagian lain dari fase 1 (P1) di
persimpangan Kantor Pos. Kendaraan ini akan mendapat isyarat hijau fase 4 (P4) di
persimpangan Gondomanan. Kendaraan dari L1 tidak membentuk pola dikarenakan
terdapat rambu ke kiri jalan terus.
2. Kendaraan yang datang ke mulut timur persimpangan Kantor Pos sebagian besar
berasal dari isyarat hijau fase 2 (P2) dan sebagian lagi dari fase 1 (P1) di
persimpangan Gondomanan. Kendaraan ini akan mendapat isyarat hijau fase 4 (P4)
di persimpangan Kantor Pos. Kendaraan dari L7 tidak membentuk pola dikarenakan
terdapat rambu ke kiri jalan terus.
3. Kendaraan yang datang ke mulut timur persimpangan Gondomanan sebagian besar
berasal dari isyarat hijau fase 3 (P3) dan sebagian lagi dari fase 2 (P2) di
persimpangan Bintaran. Kendaraan ini akan mendapat isyarat hijau fase 2 (P2) di
persimpangan Gondomanan. Kendaraan dari L10 diabaikan dikarenakan jumlahnya
sangat sedikit.
4. Kendaraan yang datang ke mulut barat persimpangan Bintaran sebagian besar
berasal dari isyarat hijau fase 4 (P4), sebagian lagi dari fase 3 (P3), dan sebagian
kecil dari fase 1 (P1) di persimpangan Gondomanan. Kendaraan ini akan mendapat
isyarat hijau fase 4 (P4) di persimpangan Bintaran.
Adanya pola kendaraan yang melintas pada kedua ruas jalan tersebut
mengakibatkan adanya pola kedatangan kendaraan di mulut barat dan timur
dapat disusun diagram trayektori kendaraan yang melintas di antara ketiga
persimpangan tersebut. Diagram trayektori pada Gambar 14 mengilustrasikan
perjalanan kendaraan pada jam-jam sibuk.
Gambar 14. Diagram trayektori kendaraan pada jam-jam sibuk
Di Jalan Senopati khususnya pada ruas jalan antara persimpangan Kantor Pos
dan Gondomanan, kendaraan dapat melaju dengan kecepatan rata-rata 40 ~ 45 km/jam.
Pada jam-jam sibuk, kendaraan dapat melaju dengan kecepatan rata-rata 40 km/jam
dengan waktu tempuh sekitar 40 detik; sementara itu pada jam-jam tidak sibuk,
kendaraan dapat melaju dengan kecepatan rata-rata 45 km/jam dengan waktu tempuh 35
detik.
Sementara itu pada ruas jalan antara persimpangan Gondomanan dan Bintaran,
kendaraan dapat melaju dengan kecepetan rata-rata 40 ~ 50 km/jam. Pada jam-jam
sibuk, kendaraan dapat melaju dengan kecepatan rata-rata 40 km/jam dengan waktu
tempuh sekitar 32 detik; sementara itu pada jam-jam tidak sibuk, kendaraan dapat
melaju dengan kecepatan rata-rata 50 km/jam dengan waktu tempuh sekitar 26 detik.
5.3 Penjadwalan Ketiga pengatur lalu-lintas
Berdasar hasil analisis atas hasil survei terhadap kondisi lalu-lintas,
persimpangan Gondomanan mempunyai volume kendaraan paling tinggi di antara
kedua persimpangan yang lain. Pengatur lalu-lintas di Gondomanan mestinya
mempunyai siklus pengaturan paling tinggi. Namun dikarenakan agar dapat bekerja
secara sinkron semua pengatur harus mempunyai nilai siklus sama, maka kedua
pengatur lokal dibuat mempunyai siklus yang sama dengan master.
Persim
pangan
Ka
ntor Pos
P
e
rs
impanga
n
Gondo
manan
P
e
rsimpan
gan
Bin
taran
Sinc data
Sinc data
Sinc data