BAB II
TINJAUAN PUSTAKA
2.1. Analisa Getaran
Sebuah mesin yang ideal sempurna pada prinsipnya tidak
menimbulkan getaran sama sekali, karena seluruh energi yang dihasilkan
diubah menjadi kerja. Sebagian energi salah satunya terbuang menjadi
getaran. Getaran timbul akibat gaya melalui elemen-elemen mesin yang ada,
dimana elemen-elemen tersebut saling beraksi satu sama lain. Kerusakan atau
keausan serta deformasi akan mengubah karakteristik dinamik sistem dan
cenderung meningkatkan energi getaran. Metode masa lalu dengan cara
mendengarkan suara mesin dan menyentuh atau meraba (hearing and
touching) dikembangkan untuk menentukan apakah mesin bekerja baik atau
tidak, tetapi metode klasik tersebut tidak lagi andal untuk saat ini, karena dua
faktor berikut ini:
1. Mesin-mesin modern dirancang untuk berjalan secara otomatis,
sehingga interaksi antara manusia (operator) dan mesin tidak lagi
efektif dan ekonomis.
2. Kebanyakan mesin-mesin modern beroperasi pada putaran atau
kecepatan tinggi, dimana getaran yang timbul banyak yang berfrekuensi
tinggi dan tidak lagi dapat dibedakan oleh indra manusia, sehingga
dibutuhkan alat untuk mendeteksi dan mengukurnya.
Salah satu cara yang paling handal untuk mendeteksi awal gejala
kerusakan mekanik, elektrikal pada peralatan adalah analisa getaran, sehingga
analisa getaran saat ini menjadi pilihan teknologi predictive maintenance
yang paling sering digunakan (Scheffer, 2004).
Suatu peralatan yang berputar sebaiknya memiliki suatu nilai getaran
apabila nilai getaran yang terjadi diluar batasan yang diizinkan maka
peralatan tersebut harus menjalani tindakan perawatan.
Getaran adalah suatu gerak bolak-balik di sekitar kesetimbangan.
Kesetimbangan maksudnya adalah keadaan dimana suatu benda berada pada
posisi diam jika tidak ada gaya yang bekerja pada benda tersebut. Getaran
mempunyai amplitudo (jarak simpangan terjauh dengan titik tengah) yang
sama.
Dasar analisis getaran dapat dipahami dengan mempelajari model
sederhana massa-pegas-peredam kejut. Struktur rumit seperti badan mobil
dapat dimodelkan sebagai "jumlahan" model massa-pegas-peredam kejut
tersebut. Model ini adalah contoh osilator harmonik sederhana.
Analisa getaran merupakan salah satu alat yang sangat bermanfaat
sebagai alat prediksi awal terhadap adanya masalah pada mekanikal,
elektrikal dan proses pada peralatan, mesin-mesin dan sistem proses yang
kontinu disuatu pabrik. Sehingga analisa getaran saat ini menjadi pilihan
teknologi predictive maintenance yang paling sering digunakan.
Selain digunakan sebagai predictive maintenance, teknik analisa
getaran juga digunakan sebagai teknik untuk mendiagnosa, yang dapat
diaplikasikan antara lain untuk: acceptance testing, pengendalian mutu,
mendeteksi bagian yang mengalami kelonggaran, pengendalian kebisingan,
mendeteksi adanya kebocoran, desain dan rekayasa mesin, dan optimasi
produksi.
2.1.1. Karakteristik Getaran
Getaran secara teknis didefenisikan sebagai gerak osilasi dari suatu
gambar 2.1. Gerakan massa dari posisi awal menuju atas dan bawah
lalu kembali keposisi semula, dan akan melanjutkan geraknya disebut
sebagai satu siklus getar. Waktu yang dibutuhkan untuk satu siklus
disebut sebagai periode getaran. Jumlah siklus pada suatu selang waktu
tertentu disebut sebagai frekuensi getaran.
Gambar 2.4. Sistem getaran sederhana (Mobley, 2008)
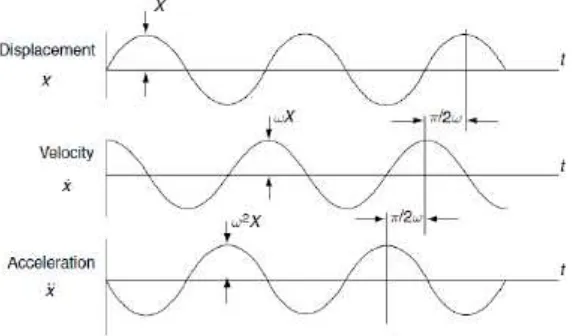
Frekuensi adalah salah satu karakteristik dasar yang digunakan
untuk mengukur dan menggambarkan getaran. Karakteristik lainnya
yaitu perpindahan, kecepatan dan percepatan. Setiap karakteristik ini
menggambarkan tingkat getaran, hubungan karakteristik ini dapat
dilihat pada gambar 2.2 sebagai berikut:
Perpindahan (displacement) mengindikasikan berapa jauh suatu
objek bergetar, kecepatan (velocity) mengindikasikan berapa cepat
objek bergetar dan percepatan (acceleration) suatu objek bergetar
terkait dengan gaya penyebab getaran.
Perioda berhubungan erat sekali dengan frekuensi. Periode
didefinisikan sebagai waktu yang dibutuhkan untuk menghasilkan 1 buah
getaran (gelombang / putaran / perulangan). Satuan perioda adalah detik,
dengan simbol untuk perioda adalah T
Panjang gelombang adalah sebuah jarak antara satuan berulang dari
sebuah pola gelombang. Biasanya memiliki denotasi huruf Yunani
lambda (λ). Dalam sebuah gelombang sinus, panjang gelombang adalah
jarak antara puncak (http://id.wikipedia.org/wiki/Panjang_gelombang).
Amplitudo adalah pengukuran skalar yang nonnegatif dari besar
suatu gelombang. Amplitudo juga dapat didefinisikan sebagai
jarak/simpangan terjauh dari titik kesetimbangan dalam gelombang
sinusoide yang kita pelajari pada mata pelajaran fisika dan matematika -
geometrika. Amplitudo dalam sistem internasional biasa disimbolkan,
dengan (A) dan memiliki satuan meter (m) (http://id.wikipedia.org/
wiki/Amplitudo).
Satuan yang digunakan tiap karakteristik dapat dilihat pada Tabel
2.1. Untuk keperluan program preventive maintenance, kecepatan
getar adalah karakteristik yang penting untuk diukur.
Tabel 2.4. Karakteristik dan satuan getaran
Karateristik Getaran
Satuan
Perpindahan
microns peak to peak
( 1 µm = 0.001 mm )
(Sumber: Maintenance Engineering Handbook, Mobley, 2008)
2.1.2. Gerak Harmonik
Getaran dari sebuah mesin merupakan resultan dari sejumlah
getaran individu komponen yang muncul oleh gerak ataupun gaya pada
komponen mekanik alat ataupun proses pada mesin atau pun sistem
yang saling terkait. Gerakan akan berulang pada periode waktu
tertentu. Interval atau selang waktu τ, dimana frekuensi menyatakan
jumlah getaran persatuan waktu, getaran berulang biasanya diukur
dalam satuan waktu yaitu detik. Setiap frekuensi komponen mesin
dapat dihitung dengan rumus berikut ini:
(2.1)
Dan frekuensi lingkaran atau kecepatan sudut dapat dihitung
dengan rumus
(2.2)
(2.3)
Besaran ω biasanya diukur dalam radian per detik. Bentuk
sederhana dari gerak periodik disebut sebagai gerak hamonik, lihat
Gambar 2.2. Pada gerak harmonik, hubungan antara perpindahan
maksimum dan waktu dapat ditampilkan:
x = X sinωt (2.4)
Perpindahan adalah ukuran dari jarak aktual yang dilalui
komponen mesin yang timbul dari getaran komponen. Nilai
maksimum dari perpindahan yaitu X, yang disebut sebagai amplitudo
getaran.
Kecepatan dalam gerak harmonik berdasarkan persamaan (2.4)
dapat diperoleh dari hasil diferensial perpindahan terhadap waktu,
yaitu:
(2.5)
Persamaan (2.5) menunjukkan bahwa kecepatan juga dinyatakan
sebagai getaran harmonik dengan nilai maksimum yaitu ω X.
Sedangkan percepatan harmonik dapat diturunkan dari persamaan (2.5)
sehingga:
(2.6)
Persamaan (2.6) menjelaskan bahwa percepatan juga dinyatakan
2.1.3. Gerak Periodik
Gerak yang berulang dalam selang waktu yang sama disebut
gerak periodik. Gerak periodik ini selalu dapat dinyatakan dalam fungsi
sinus atau cosinus, oleh sebab itu gerak periodik disebut gerak
harmonik. Jika gerak yang periodik ini bergerak bolak-balik melalui
lintasan yang sama disebut getaran atau osilasi. Getaran mesin pada
umumnya memiliki beberapa frekuensi yang muncul bersama-sama.
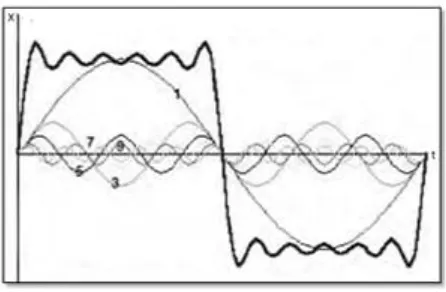
Gerak periodik dapat dihasilkan oleh getaran bebas sistem dengan
banyak derajat kebebasan, dimana getaran pada tiap frekuensi natural
memberi sumbangan. Getaran semacam ini menghasilkan bentuk
gelombang kompleks dapat dilihat pada Gambar 2.3 yang
menunjukkan gerak periodik gelombang sinyal segiempat dan
gelombang pembentukannya dalam domain waktu.
Gambar 2.6. Gerak periodik gelombang sinyal segi empat dan
gelombang Pembentuknya dalam domain waktu (Robert K. Vierck, 1995)
Pembentukannya dalam domain waktu dari gambar di atas ada
beberapa hal yang perlu kita perhatikan adalah sebagai berikut:
1. Gelombang pertama yang harus kita amati adalah gelombang (1).
Hal ini diwakili oleh satu siklus. Sebagai skala waktu adalah 1 s, ia
2. Gelombang berikutnya untuk dipertimbangkan adalah gelombang
(3). Hal ini dapat dilihat bahwa ia memiliki tiga siklus pada periode
yang sama dari gelombang pertama. Jadi, ia memiliki frekuensi 3
Hz.
3. Ketiga adalah gelombang (5). Berikut lima siklus dapat ditelusuri,
dan tentunya memiliki frekuensi dari 5 Hz.
4. Berikutnya adalah gelombang (7). Ia memiliki tujuh siklus dan
karena itu frekuensi 7 Hz.
5. Gelombang (9) adalah berikutnya dengan sembilan siklus dan akan
memiliki frekuensi 9 Hz.
Gerak harmonik pada Gambar 2.3 dapat dinyatakan dalam
deretan sinus dan cosinus yang dihubungkan secara harmonik. Jika x(t)
adalah fungsi periodik dengan periode τ, maka fungsi ini dapat
dinyatakan oleh deret Fourier (Pain, 2005)sebagai:
(2.7)
Dengan ;
Pada gelombang segiempat berlaku x(t) = ± Apada t = 0, dan t = T, dan
seterusnya. Deret ini menunjukkan nilai rata-rata dari fungsi yang
diskontinu.
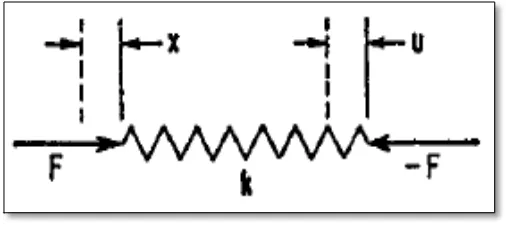
Perpindahan didefinisikan sebagai jarak linier untuk gerak
translasi, dan untuk gerak rotasi, perpindahan didefinisikan sebagai
gerakan sudut (Harris dan Piersol, 2002). Gambar 2.5 menunjukkan
pegas linier sebagai berikut:
Gambar 2.4. Pegas Linier (Harris dan Piersol, 2002).
Pada Gambar 2.4. menggambarkan perubahan panjang pegas
proporsional dengan gaya yang bekerja sepanjang panjangnya, dan
dapat kita rumuskan sebagai berikut:
u x k
F (2.8)
Pegas dianggap tidak memiliki massa, sehingga gaya yang
bekerja pada salah satu ujungnya sama dan berlawanan dengan gaya
yang bekerja pada ujung yang lain sehingga konstanta proporsional
adalah konstan. Massa adalah benda tegar seperti yang ditunjukkan
Gambar 2.5. Benda Tegar (Harris dan Piersol, 2002).
Massa dengan percepatan , menurut hukum kedua Newton
sebanding dengan resultan semua gaya yang bekerja pada
massa dan hal ini dapat dirumuskan sebagai berikut:
x m
F (2.9)
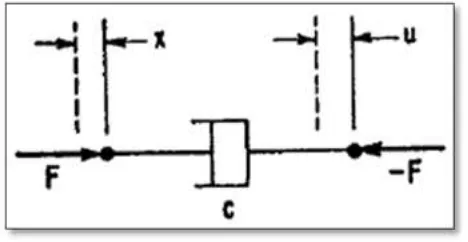
Sedangkan redaman yang digunakan dalam penelitian ini digambarkan
seperti pada Gambar 2.6 sebagai berikut:
Gambar 2.6. Redaman (Harris dan Piersol, 2002).
Konstanta c adalah koefisien redaman, redaman yang ideal
dianggap tidak memiliki massa sehingga besarnya gaya pada kedua
ujungnya sama namun arahnya berlawanan, sehingga:
u x c
F (2.10)
Sistem 1 DOF Tanpa redaman dapat di lihat pada Gambar 2.7
sebagai berikut:
Gambar 2.7. Sistem 1 DOF Tanpa Redaman (Harris dan Piersol, 2002).
Gaya yang diberikan oleh massa dan pegas massa yang
berlawanan dengan gaya diterapkan oleh pegas pada massa.
Persamaan Newton untuk massa adalah sebagai berikut:
0 kx x
m (2.11)
Dimana x = 0 karena posisi kesetimbangan massa. Sehingga solusi
untuk penyelesaian persamaan diatas adalah:
t
Dimana: = sudut frekuensi natural
Osilasi sinusoida massa berulang terus menerus, dan interval waktu
untuk menyelesaikan satu siklus periode dapat dirumuskan:
n
Dan kebalikan periode adalah frekuensi natural dan dirumuskan sebagai
2.1.4.2. Free vibration dengan redaman
Sistem pegas massa dan diagram benda bebas dapat di lihat pada
Gambar 2.8 sebagai berikut:
Gambar 2.8. Sistem Pegas Massa dan Diagram Benda Bebas (William
T. Thomson, 1992)
Hukum Newton kedua adalah dasar untuk meneliti gerak sistem,
pada Gambar 2.8. perubahan bentuk pegas pada posisi kesetimbangan
adalah Δ dan gaya pegas kΔ adalah sama dengan gaya gravitasi w yang
bekerja pada massa m, sehingga dapat dirumuskan:
mg w
k (2.16)
Hukum Newton kedua untuk gerak diterapkan pada massa m:
Dan karena kΔ = w, diperoleh:
kx x
m (2.18)
Frekuensi lingkaran , sehingga persamaan dapat ditulis:
0 2
x
x n
(2.19)
Sehingga persamaan umum dari persamaan diferensial linier orde kedua
yang homogen adalah sebagai berikut:
0 cos
sin t B t
A
x n n (2.20)
Perioda natural osilasi dibentuk dari ; atau
k m
2 (2.21)
Dan frekuensi natural adalah:
k
Persamaan homogen untuk Gambar 2.9 adalah:
0
Dan koefisien redaman kritis dirumuskan:
n
c km m
c 2 2 (2.24)
Sehingga rasio redaman adalah:
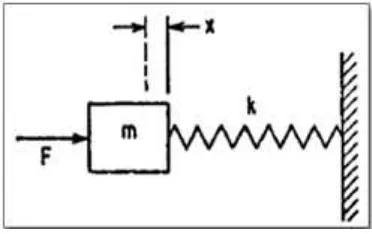
2.1.5. Getaran paksa (Force vibration)
2.1.5.1. Force vibration tanpa redaman
Getaran yang terjadi karena rangsangan gaya luar disebut
getaran paksa atau sistem teraksitasi akibat gaya tanpa redaman yang
ditunjukkan seperti pada Gambar 2.9 sebagai berikut:
Gambar 2.9. Sistem Teraksitasi Akibat Gaya Tanpa Redaman (Robert
K. Vierck, 1995)
Eksitasi ini biasanya dihasilkan oleh ketidakseimbangan pada
mesin-mesin yang berputar, dan dapat dirumuskan sebagai berikut:
t F kx x
m 0sin (2.27)
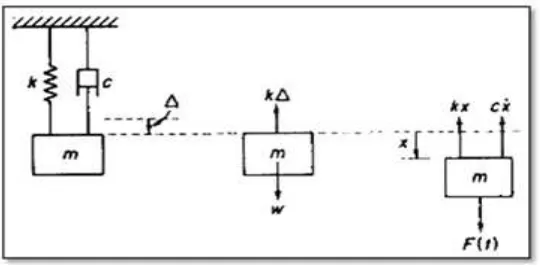
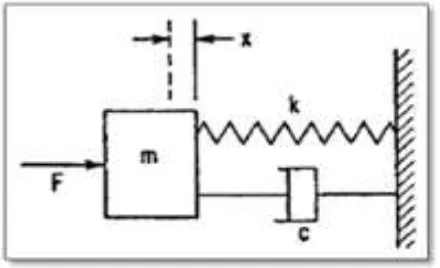
2.1.5.2. Force vibration dengan redaman
Sistem yang teredam karena kekentalan dengan eksitasi
harmonik atau sistem teraksitasi akibat gaya dengan redaman
Gambar 2.10. Sistem Teraksitasi Akibat Gaya dengan Redaman (Robert
K. Vierck, 1995)
Dari Gambar 2.10. maka persamaan diferensial geraknya adalah:
t F kx x c x
m 0sin (2.28)
Solusi khusus persamaan diatas adalah keadaan tunak (steady state)
dengan frekuensi ω yang sama dengan frekuensi eksitasi, sehingga
dapat diasumsikan menjadi:
t A
x sin (2.29)
t B t A
x sin cos (2.30)
Dimana:
A = Amplitude osilasi
Φ = Beda fase simpangan terhadap gaya eksitasi
2
2.1.6. Pemilihan Parameter dan Transducer
Dalam pemilihan parameter yang akan diukur seringkali ditentukan
berdasarkan spesifikasi ataupun standar yang tersedia. Dalam kasus
dimana hal ini tidak tersedia maka pertimbangan pada Tabel 2.2. dapat
digunakan, atau menggunakan flattest spectrum rule.
Tabel 2.5. Panduan pemilihan parameter yang akan diukur
Perpindahan
(displacement)
a) frekuensi rendah, dibawah 600 cpm
b) pengukuran getaran shaft pada mesin berat
dengan rotor yang relatif ringan.
c) menggunakan transduser velocity dan tranduser
acceleration.
d) transduser velocity, untuk mengukur
displacement dengan rangkaian single integrator.
e) transduser accelerometer, dapat digunakan
untuk mengukur diplacement getaran dengan
rangkaian double integrator.
Kecepatan
(velocity)
a) range frekuensi antara 600 – 100.000 cpm
b) pengukuran over all level getaran mesin
c) untuk melakukan prosedur analisa secara umum
Perpindahan
(acceleration)
a) pengukuran pada frekuensi tinggi/ultrasonic
sampai 600000 cpm atau lebih
b) untuk pengukuran spike energy pada roll
bearing, ball bearing, gear, dan sumber getaran
aerodinamis dengan frekuensi tinggi
Sumber : http://vibrasi.wordpress.com/category/teori-vibrasi
2.1.7. Pemasangan Transducer Pengukur Sinyal Getaran
Berbagai metode pemasangan transducer pada permukaan yang
diuji, antara lain:
1) Transducer dengan ikatan baut pada permukaan uji dengan
menggunakan ulir
2) Transducer dengan ikatan semen pada permukaan uji
3) Transducer dengan ikatan lapisan lilin
4) Transducer dengan magnet permanen dilekatkan pada permukaan
yang ferromagnetic
6) Transducer di pegang langsung dengan tangan terhadap
permukaan uji.
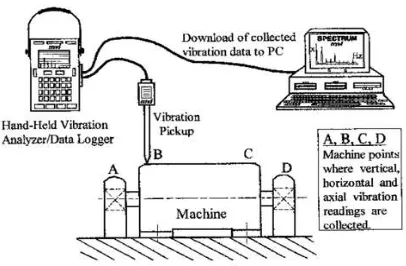
Suatu alternatif dengan biaya yang cukup murah dalam
pemantauan secara kontinu sinyal getaran adalah dengan mengambil
data getaran dari mesin pada interval waktu rutin melalui alat vibration
analyzer genggam yang dapat menampilkan output analisa getaran
langsung ditempat seperti (nilai puncak, filter, RMS dan lainnya) dan
spektrum FFT. Alat genggam ini dilengkapi dengan sebuah
accelerometer vibration pick-up, sehingga teknisi pemeliharaan dapat
secara aman menyentuh bagian yang akan dipantau pada tiap mesin
dalam pemeriksaan rutin seperti ilustrasi pada Gambar 2.11 sebagai
berikut:
Gambar 2.11. Ilustrasi Vibration Analyzer portabel dan data logger (Scheffer, 2004)
2.1.8. Analisa Sinyal Getaran dan Identifikasi Penyebab Getaran
Pada mesin yang beroperasi dalam kondisi paling baik sekalipun,
pemantauan sinyal getaran akan memunculkan amplitudo, meskipun
adalah dampak yang wajar dari adanya perubahan kondisi operasi,
misalnya: perubahan suhu, perubahan beban, keausan, dan fluktuasi
dari lingkungan mesin. Dan pada saat amplitudo berada diatas
baseline, maka trend perlu dicermati oleh teknisi agar tetap secara
kontinu menguji kebutuhan potensial terhadap:
a. Adanya perubahan kondisi operasi mesin yang sementara
b. Penjadwalan dini terhadap tindakan perbaikan
c. Penghentian segera operasi mesin oleh karena adanya kenaikan
yang signifikan dari amplitudo getaran mesin.
Kenaikan amplitudo sinyal getaran terhadap waktu dapat dilihat
pada gambar 2.12 sebagai berikut:
Gambar 2.12. Kenaikan amplitudo sinyal getaran terhadap waktu (Maurice L Adams, 2000)
Ketika tingkat getaran mesin mulai bertambah melampaui tingkat
baseline, seperti yang dapat dilihat pada Gambar 2.7, hal ini
menandakan masalah pada mesin mulai timbul, dan pertambahan pada
tingkat getaran seringkali bukan merupakan gejala dari masalah
tersembunyi. Perhatian diberikan pada mesin yang mulai menunjukkan
kenaikan pada tingkat getarannya.
Data baseline yang dimaksud adalah sekumpulan data yang diukur
atau diobservasi pada saat mesin beroperasi dan dapat diterima dan
stabil. Hasil pengukuran dapat dibandingkan dengan nilai baseline
untuk mendeteksi adanya perubahan. Data baseline hendaknya secara
operasi normalnya. Oleh karena itu pada mesin dengan kondisi operasi
berbeda, baseline untuk perbedaan kondisi ini juga berbeda. Untuk
mesin baru atau telah diperbaiki, maka akan ada periode keausan.
Sehingga, umumnya akan terlihat perubahan nilai yang diukur selama
beberapa hari atau minggu selama beroperasi. Maka, perlu diberikan
waktu untuk terjadinya keausan sebelum data baseline diambil.
Sedangkan untuk mesin yang telah beroperasi pada periode waktu
yang cukup lama, dan baru pertama kali dipantau, baseline dapat
diambil sebagai titik referensi adanya trend. Untuk mengevaluasi
tingkat keparahan (severity) dari sinyal getaran pada mesin berputar,
International Organization for Standardization (ISO) telah
menerbitkan suatu standar untuk mengevaluasi berdasarkan kelas dan
tipe dari mesin yang disajikan pada Tabel 2.3 sebagai berikut:
Tabel 2.6. Kriteria zona evaluasi tingkat getaran tipikal
Pada standar tersebut, parameter yang diukur adalah kecepatan
getaran dan dibandingkan nilai RMS kecepatan berdasarkan klasifikasi
daya mesin yaitu:
a. Kelas I (Class I) untuk mesin dengan daya dibawah 15 kW.
b. Kelas II (Class II) untuk mesin dengan data diantara 15 – 75 kW.
d. Kelas IV (Clas IV), untuk mesin fleskibel dengan daya diatas 75
syarat mesin tidak boleh dioperasikan secara terus menerus/lama.
c. Zona C, yaitu getaran pada mesin yang dianggap tidak memuaskan
untuk pengoperasian terus menerus untuk waktu yang lama.
Umumnya mesin dioperasikan untuk waktu yang terbatas pada
kondisi ini, sampai kesempatan untuk tindakan perbaikan
dilakukan.
d. Zona D, yaitu nilai getaran yang dapat mengakibatkan kerusakan
pada mesin.
Untuk mesin-mesin yang didesain dengan jam operasi yang
panjang/lama maka diberikan secara praktis ISO 10816-3 yang
memberikan batasan getaran operasional, yaitu alarms dan trips.
Alarms merupakan nilai batas dari getaran yang ditentukan untuk
memberikan peringatan dini bahwa getaran sudah mencapai ataupun
ada perubahan yang signifikan. Apabila batas alarms terjadi,
pengoperasian mesin dapat dilanjutkan untuk sementara waktu sambil
dilakukan investigasi untuk mengidentifikasi penyebab perubahan
getaran dan menentukan tindakan perbaikannya. Nilai batas alarm
pada standar adalah 1,25 kali di atas batas zona B.
Trips merupakan batasan getaran mendekati tingkat getaran yang
dapat menyebabkan kerusakan pada mesin. Apabila batasan trip sudah
mengurangi getaran dan mesin dihentikan pengoperasiannya. Nilai
batas trips pada standar adalah 1,25 kali di atas batas zona C.
2.1.8.1. Spektrum frekuensi
Ide dasar dari transformasi Fourier adalah fungsi suatu sinyal
domain waktu dapat dibangun dari penjumlahan fungsi sinus dengan
distibusi berkelanjutan dari frekuensi, mulai dari nol sampai kepada
frekuensi yang diinginkan. Pada sinyal getaran periodik yang berulang
atau pada periode tertentu, deret Fourier dapat diaplikasikan dan
jumlah komponen sinus hanya pada frekuensi diskrit yang merupakan
perkalian integer, n = 1, 2,... dari frekuensi dasar. Meskipun getaran
mesin sering memiliki jumlah komponen harmonik signifikan yang
terbatas, frekuensi tersebut sering pula bukan merupakan perkalian
integer dari frekuensi dasar, dan oleh karena itu transformasi Fourier,
dan bukan deret Fourier, adalah alat yang memadai untuk melacak
sinyal getaran mesin dari domain waktu menjadi domain frekuensi.
Hubungan antara sinyal fungsi waktu, X (t) dan spektrum frekuensi
atau transformasi Fourier, dapat dilihat pada Gambar 2.13. Dengan
mentransformasikan sinyal domain waktu menjadi domain frekuensi,
komponen yang mempengaruhi sinyal getaran tersebut dapat
Gambar 2.13. Ilustrasi dari spektrum frekuensi sinyal yang berosilasi (Maurice L Adams, 2000).
Analisa spektrum sinyal berbasis waktu digunakan untuk
kebutuhan berbagai investigasi, terutama untuk mendiagnosa dan
menyelesaikan masalah getaran seperti dapat dilihat pada Gambar 2.14
sebagai berikut:
Gambar 2.14. Kegagalan pada elemen mesin akan memunculkan amplitudo pada frekuensi tertentu (Scheffer, 2004).
Untuk melihat jenis kerusakan pada bearing dari spektrum
frekuensi dapat dilihat pada standart charlotte pada gambar 2.15 sebagai
Gambar 2.15. Spektrum frekuensi rolling element bearings (Technical Associates Of Charlotte, 2010)
2.2. Bearing
2.2.1. Nomenklatur bearing
Nomenklatur dari bantalan bola unit terpadu NTN seperti pada
Gambar 2.16. mengikuti standar JIS (Japanese Industrial Standards) B
1512, yang mengatur pengkodean terhadap model bantalan atau
housing, diameter, diameter bore, aksesoris serta kekhususan.
2.2.2. Ciri Getaran Dinamik Akibat Kerusakan Bantalan
Ciri getaran dalam bentuk waveform difokuskan pada hubungan
antara percepatan sebagai fungsi dari waktu, yang berasal dari sifat
fisik komponen dinamika motor dan komponen bearing. Domain
frekuensi hasil eksperimental yang merupakan ciri getaran yang
berasal dari sifat fisik komponen motor akibat gaya-gaya imbalance
dari komponen motor yang berdinamika dan menyebabkan komponen
bantalan gelinding (main bearing) menghasilkan frekuensi getaran
seperti ball pass frequency outer (BPFO), ball pass frequency inner
(BPFI), ball spin frequency (BSF), fundamental train frequency (FTF)
serta wavenees. Carolus (2006), menyimpulkan bahwa akibat dari
banyaknya sinyal yang di rekam oleh accelerometer, maka diadakan
analisis respon getaran hasil eksperimental yang dilakukan secara
bertahap. Komponen-komponen bantalan tersebut dapat digambarkan
seperti pada gambar 2.16 sebagai berikut:
Gambar 2.17. Komponen-komponen bantalan (Ball Bearing)
Menurut Suhardjono (2005), frekuensi yang dihasilkan oleh
masing-masing komponen bearing akibat kelonggaran atau cacat lokal
dapat dihitung dengan rumus-rumus sebagai berikut :
a. Frekuensi pada lintasan luar (ball pass frequency outer race, BPF0):
(2.35)
b. Frekuensi pada lintasan dalam (ball pass frequency inner race,BPFI) :
(2.36)
c. Frekuensi putar bola (ball spin frequency, BSF) :
(2.37)
d. Frekuensi pergerakan cage (fundamental train frequency, FTF):
dimana :
Nb = Jumlah bola (Number of balls),
Bd = Diameter bola (Ball diameter), mm
Pd = Diameter Pitch (Pitch diameter), mm
Fr = Frekuensi relatif antara inner race dan outer race,
(Hz )
α = Sudut kontak (Contact angle), derajat.
2.3. Pengolahan Data Vibrasi
2.3.1. Time Domain
Pengolahan data secara time domain melibatkan data hasil
pengukuran objek pemantauan respon getaran, tekanan fluida kerja,
temperatur fluida kerja maupun aliran fluida kerja. Dalam kasus
pengukuran temperatur dengan thermometer yang konvensional karena
karakteristik alat ukurnya, maka tidak dapat dilakukan pengukuran
temperatur secara dinamik. Demikian pula halnya dengan pengukuran
aliran fluida kerja, sehingga untuk memungkinkan pengukuran objek
pemantauan berupa sinyal dinamik, maka diperlukan sensor yang
memiliki karakteristik dinamik tertentu. Untuk karakteristik sinyal
Gambar 2.18. Karakteristik Sinyal Statik dan Dinamik (Ramses Y.
Hutahaean)
Hasil pengukuran objek pemantauan dalam domain waktu
seperti gambar 2.18 dapat berupa sinyal :
1) Sinyal statik, yaitu sinyal yang karakteristiknya (misal: amplitudo,
arah kerjanya) tidak berubah terhadap waktu.
2) Sinyal dinamik, yaitu sinyal yang karakteristiknya berubah
terhadap waktu, sehingga tidak konstan.
Sinyal dinamik yang sering ditemui dalam praktek berasal
dari sinyal getaran, baik yang diukur menggunakan accelerometer,
vibrometer, maupun sensor simpangan getaran. Untuk keperluan
pengolahan sinyal getaran dalam time domain, perlu diperhatikan
karakteristik sinyal getaran yang dideteksi oleh masing-masing sensor
percepatan, kecepatan, dan simpangan getaran (displacement).
2.3.2. Frekuensi Domain
Pengolahan data frekuensi domain umumnya dilakukan dengan tujuan
a) Untuk memeriksa apakah amplitudo suatu frekuensi domain dalam
batas yang diizinkan oleh standar.
b) Untuk memeriksa apakah amplitudo untuk rentang frekuensi
tertentu masih berada dalam batas yang diizinkan oleh standar.
Secara konseptual, pengolahan frekuensi domain dilakukan
dengan mengkonversikan data time domain ke dalam frekuensi
domain. Dalam praktiknya proses konversi ini dilakukan menggunakan
proses FFT (Fast Fourier Transfer) atau Transformasi Fourier Cepat
seperti terlihat pada gambar 2.18 sebagai berikut:
Gambar 2.19. Hubungan Time Domain dengan Frekuesi
Domain
Data domain waktu merupakan respon total sinyal getaran, sehingga
karakteristik masing-masing sinyal getarannya tidak terlihat jelas.
Dengan bantuan konsep deret Fourier, maka sinyal getaran ini dapat
dipilah-pilah menjadi komponen dalam bentuk sinyal sinus yang