PENERAPAN PLC (PROGRAMMABLE LOGIC CONTROLLER)
SEBAGAI SISTEM KENDALI PADA MESIN KONVEYOR
SKRIPSI
Diajukan Dalam Rangka Menyelesaikan Studi Strata 1 Untuk Memperoleh Gelar Sarjana Pendidikan
Oleh :
Nama : Ahmad Hanif
NIM : 5201401038
Program Studi : Pendidikan Teknik Mesin
JURUSAN TEKNIK MESIN
FAKULTAS TEKNIK
UNIVERSITAS NEGERI SEMARANG
2006
2 Skripsi ini telah dipertahankan dihadapan sidang panitia ujian skripsi Fakultas Teknik Universitas Negeri Semarang pada :
Hari : Jumat Tanggal : 24 Maret 2006 Panitia ujian, Ketua Sekretaris Drs. Pramono Drs. Supraptono, M.Pd NIP. 131 474 226 NIP. 131 126 645 Pembimbing I Penguji I Drs. Wirawan S., M.T Drs. Wirawan S., M.T NIP. 131 876 223 NIP 131 876 223 Pembimbing II Penguji II Drs. Karsono, M.Pd Drs. Karsono, M.Pd NIP. 130 515 762 NIP 130 515 762 Penguji III Drs. Pramono NIP. 131 474 226 Mengetahui,
Dekan Fakultas Teknik
Prof.Dr. Soesanto, M.Pd NIP 130 875 753
3
konveyor”. Skripsi. Teknik Mesin, Fakultas Teknik Universitas Negeri Semarang.
Penelitian ini dilatarbelakangi oleh sistem kendali suatu mesin yang menggunakan sistem pengendali otomatis sebagai pengganti sistem pengendali konvensional atau menggunakan saklar magnet (Magnetic Controller). Sebagian besar industri menggunakan sistem kendali yang ringkas, mudah penggunaannya, mudah untuk memodifikasi kerjanya dan mempunyai keistemewaan dibandingkan dengan saklar magnet kendali konvensional. Dari analisis saat ini ditemukan bahwa sebagian besar industri yang menerapkan sistem kontrol menggunakan Programmable Logic Controller (PLC) sebagai alat kontrol kerja produksinya. Tujuan dari penelitian ini adalah untuk merancang dan membangun sebuah miniatur suatu mesin transfer menggunakan sistem kendali berbasis PLC yang dapat digunakan sebagai simulasi kerja pemindahan barang di suatu industri.
PLC adalah sebuah alat yang digunakan untuk menggantikan rangkaian sederetan relay yang dijumpai pada sistem kontrol proses konvensional (Eko Putra, Agfianto. 2004:1). Pengguna membuat program (dengan menggunakan Ladder program atau diagram tangga) yang kemudian dijalankan oleh PLC yang bersangkutan. PLC menentukan aksi yang harus dilakukan pada instrumen keluaran berkaitan dengan status suatu ukuran atau besaran yang diamati. Program yang digunakan untuk pembuatan Ladder Diagram bagi perintah PLC adalah menggunakan Program Syswin seri 3.2. Komponen utama sebagai perintah masukan PLC sebagai pemicu program adalah sensor LDR (Light Dependent Resistor) dan saklar ON/OFF. Sedangkan Output yang digunakan sebagai perintah lanjutan bagi masukan PLC adalah relay sebagai pemicu kerja Motor AC dan kerja Selenoid Valve untuk menggerakkan Silinder Pneumatik yang menggunakan jenis Double Active Cylinder (CylinderPneumatik) Penggerak Ganda.
Penerapan PLC sebagai sistem kendali pada mesin konveyor menggunakan metode penelitian diskriptif prosentase kuantitatif. Variabel penelitian yang digunakan adalah ON, OFF, Belok 900. Diskriptif kuantitatif ditunjukkan dengan banyaknya jumlah benar atau salah kemudian diprosentase besarnya jumlah benar dan salahnya.
Hasil penelitian menunjukkan bahwa pada posisi ON, OFF, Belok 900 PLC memberi keluaran yang benar. Hal ini menunjukkan bahwa PLC yang ada dapat digunakan atau diterapkan pada mesin konveyor yang telah dibuat sesuai dengan yang diinginkan.
Pembuatan sistem kontrol berbasis PLC diperlukan pengujian berulang-ulang terutama untuk memperoleh waktu tenggang (time delay) antara sensor dengan matinya motor AC.
4
MOTTO
1. Allah tidak akan merubah nasib suatu kaum (seseorang) jika bukan kaum itu (seseorang) itu yang merubah nasibnya sendiri.
2. Keberhasilan tidak akan di nikmati tanpa adanya usaha dan pengorbanan. (Q.S Al- An’am: 3)
3. Barang siapa menempuh suatu jalan untuk mencari ilmu maka Allah akan memudahkan kepadanya jalan yang baik/ surga. (HR Muslim)
4. Sesungguhnya sesudah kesulitan itu ada kemudahan, maka apabila kamu telah selesai (dari suatu masalah), kerjakanlah dengan sungguh-sungguh (urusan) yang lain dan hanya kepada Tuhanlah hendaknya kamu berharap. (Q.S Al Insyirakh).
5. Hidup didunia ini hanya ada 2 yaitu bersyukur dan bersabar. (Peneliti)
PERSEMBAHAN
Skripsi ini kuperuntukan kepada: 1. Bapak dan Ibuku tercinta
2. Mbahku, Mas Ayis, Adik Mamnun dan Seluruh Keluarga Besar Mbah Hadi. 3. Seseorang yang selalu memberiku semangat
5 Segala puji syukur peneliti panjatkan kehadirat Allah SWT yang telah memberikan segala Rahmat dan Hidayah-Nya, sehingga peneliti dapat menyelesaikan skripsi ini.
Penyusunan skripsi ini tidak terlepas dari bimbingan dan bantuan dari berbagai pihak, oleh karena itu peneliti menyampaikan terima kasih kepada : 1. Bapak Prof. Dr. Soesanto, M.Pd, Dekan Fakultas Teknik Universitas Negeri
Semarang.
2. Bapak Drs. Pramono, Ketua Jurusan Teknik Mesin Universitas Negeri Semarang.
3. Bapak Drs. Murdani, M.Pd, Ketua Program Studi Pendidikan Teknik Mesin. 4. Bapak Wirawan, MT, Dosen Pembimbing I.
5. Bapak Drs. Karsono, M.Pd Dosen Pembimbing II. 6. Bapak Drs. Pramono, Dosen Penguji netral.
7. Rekan-rekan PTM 2001 dan kost 001 yang telah memberikan bantuan baik moril maupun materiil selama penelitian ini berlangsung.
Semoga Allah SWT memberikan balasan atas jasa-jasa yang telah membantu dan membimbing peneliti dalam menyelesaikan skripsi ini. Akhir kata penulis berharap semoga skripsi ini memberikan tambahan ilmu bagi yang membacanya.
Semarang, Maret 2006
6 Halaman
HALAMAN JUDUL ... i
HALAMAN PENGESAHAN ... ii
ABSTRAK ...iii
MOTTO DAN PERSEMBAHAN ... iv
KATA PENGANTAR ... v
DAFTAR ISI... vi
DAFTAR TABEL ...viii
DAFTAR GAMBAR ... ix DAFTAR LAMPIRAN ... xi BAB I PENDAHULUAN A. Latar Belakang ... 1 B. Pembatasan Masalah ... 2 C. Permasalahan ... 2 D. Tujuan Penelitian ... 2 E. Manfaat Penelitian ... 3 F. Penegasan Istilah... 3 G. Sistematika Skripsi... 4
7
B. Penerapan PLC pada Mesin Konveyor ... 23
C. Kerangka Berpikir ... 39
BAB III METODE PENELITIAN A. Metode Penelitian ... 41
B. Variabel Penelitian ... 41
C. Tahap Penelitian ... 41
D. Instrumen Penelitian ... 42
E. Alur Penelitian ... 42
F. Metode Pengumpulan Data ... 44
G. Analisis Data ... 46
BAB IV HASIL DAN PEMBAHASAN PENELITIAN A. Hasil Penelitian ... 48 B. Pembahasan ... 51 C. Keterbatasan Penelitian... 54 BAB V PENUTUP A. Simpulan ... 55 B. Saran... 55 DAFTAR PUSTAKA ... 56 LAMPIRAN-LAMPIRAN
8 Halaman
Tabel 1. Indikator status pada CPM 1A ... 21
Tabel 2. Ringkasan penggunaan tombol-singkat (ShortCut) ... 22
Tabel 3. Uji ON, OFF, Belok 900 ... 45
Tabel 4. Hasil Penelitian ... 48
9 Halaman
Gambar 1. Diagram kerja tiga komponen utama sistem PLC ... 8
Gambar 2. Diagram Blok Sistem PLC... 8
Gambar 3. Simbol Perangkat masukan PLC ... 10
Gambar 4. Contoh-contoh simbol perangkat keluaran ... 12
Gambar 5. Load (LD) ... 15
Gambar 6. Load Not (LD NOT) ... 15
Gambar 7. AND ... 16
Gambar 8. AND NOT ... 16
Gambar 9. OR ... 16
Gambar 10. OR NOT ... 16
Gambar 11. OUT ... 17
Gambar 12. AND Load (AND LD) ... 17
Gambar 13. OR Load (OR LD) ... 18
Gambar 14. Simbol Diagram Ladder ... 19
Gambar 15. Gambar OMRON CPM 1A ... 25
Gambar 16. Rangkaian Kelengkapan PLC OMRON CPM 1A ... 25
Gambar 17. Tampilan awal program Syswin 3.2 ... 27
Gambar 18. Tampilan menu awal project Syswin 3.2... 28
Gambar 19. Tampilan menghubungkan PLC dengan komputer ... 30
Gambar 20. Tampilan Menu Port Communication ... 30
10 Gambar 24. Rangkaian Sensor Cahaya ... 36 Gambar 25. Alur Masukan dan Keluaran Pengerjaan PLC... 38
11
Lampiran 1.Diagram Ladder... 57
Lampiran 2.Tabel Mnemonic... 60
Lampiran 3. Gambar Rangkaian I/O PLC CPM 1A... 63
Lampiran 4. Gambar Rangkaian Kabel Motor AC ... 64
Lampiran 5. Gambar Rangkaian Kabel Alur Masukan PLC ... 65
Lampiran 6. Gambar Rangkaian Kabel Keluaran Pneumatik ... 66
Lampiran 7.Gambar Kontruksi Konveyor Berbasis PLC ... 67
Lampiran 8. Dokumentasi Penelitian... 68
Lampiran 9. Hasil Penelitian ... 71
Lampiran 10. Surat Keterangan Dosen Pembimbing... 72
Lampiran 11. Surat Ijin Penelitian ... 73
1
A. LATAR BELAKANG
Dunia teknologi berkembang pesat dewasa ini sehingga menuntut kita untuk lebih maju agar tidak tertinggal dengan negara lain. Dunia Industri menuntut kita untuk meningkatkan produksinya dengan efektif dan efisien.
Sistem pengendalian dan pengontrolan berbasis Programmable Logic Controller (PLC) akhir-akhir ini sedang dikembangkan seiring dengan tuntutan industri. Laju perkembangan zaman yang terjadi pada saat ini, sistem kendali suatu mesin tidak menggunakan sistem pengendali konvensional yang menggunakan saklar magnet (Magnetic Controller), tetapi sebagian besar industi menggunakan PLC, dan mempunyai keistemewaan dibandingkan dengan saklar magnet kendali konvensional.
Berdasarkan latar belakang diatas dimana teknologi berkembang pesat yang menuntut peralihan dari mesin konvensional ke mesin otomatis, akan diangkat suatu tema penggunaan PLC sebagai pengendali dalam proses perpindahan barang dengan menggunakan konveyor berdasarkan keistemewaan penggunaan pengendali berbasis PLC. Berdasarkan judul ini penulis akan membuat sebuah miniatur sistem pengendali PLC pada mesin konveyor yang digunakan untuk memindahkan beban dari satu tempat ke tempat lain dengan menggunakan penggerak motorAC (Alternating Current).
B. PEMBATASAN MASALAH
Pembatasan masalah diperlukan untuk memperjelas dari pokok permasalahan yang akan dibahas dalam pembuatan skripsi ini. Pembatasan masalah dari judul ini adalah :
1. Pembuatan miniatur suatu mesin konveyor sesuai yang diinginkan dan dikendalikan dengan PLC.
2. Menerapkan program sebagai perintah di dalam PLC sesuai dengan mesin konveyor yang dirancang untuk ON, OFF dan Belok 900.
C. PERMASALAHAN
Permasalahan yang akan diangkat dalam pembuatan skripsi ini adalah sebagai berikut :
1. Bagaimana membuat miniatur sistem kendali konveyor berbasis PLC ? 2. Bagaimana menerapkan program keluaran PLC sebagai perintah untuk
mengendalikan mesin konveyor yang dirancang untuk ON, OFF dan Belok 900 ?
D. TUJUAN PENELITIAN
Tujuan penelitian ini adalah sebagai berikut :
1. Dapat merancang sebuah miniatur suatu mesin konveyor menggunakan sistem kendali PLC.
2. Dapat menerapkan program keluaran PLC untuk ON, OFF dan Belok 900 yang digunakan sebagai perintah-perintah untuk mengerakkan mesin konveyor.
E. MANFAAT PENELITIAN
Manfaat yang diharapkan dari penelitian ini adalah sebagai berikut:
1. Memberi alternatif setingkat lebih maju dari sebuah sistem pengendalian dengan menggunakan sistem pengendali berbasis PLC terhadap sistem pengendalian konvensional yang masih menggunakan Magnetic Controller.
2. Bagi dunia industri merupakan sumbang saran, khususnya pada proses sistem pengendalian agar efisiensi dan optimalisasi hasil produksi dapat terpenuhi.
3. Bagi dunia pendidikan khususnya Jurusan Teknik Mesin UNNES merupakan salah satu aplikasi sistem pengendalian suatu mesin sehingga menjadi bahan praktikan dan mudah dipahami sekaligus dapat dipraktikkan oleh mahasiswa lain.
F. PENEGASAN ISTILAH
Untuk menghindari salah penafsiran tentang judul skripsi ini, diperlukan penegasan istilah, yaitu sebagai berikut:
1. Penerapan : Memasang sesuatu pada sesuatu hal yang lain. Dalam judul ini yang dimaksud adalah memanfaatkan, mengunakan atau memakai PLC untuk program ON, OFF dan Belok 900sebagai pengendali pada mesin konveyor. (KBBI Edisi Kedua, 1995:1044).
2. PLC (Programable Logic Controlled) : Sebuah alat yang digunakan untuk menggantikan rangkaian sederetan relay yang dijumpai pada sistem control proses konvensional (Eko Putra, Agfianto. 2004:1).
3. Sistem Kendali : Sesuatu hal yang mengatur. Dalam judul ini PLC mengatur jalannya mesin konveyor. (KBBI Edisi Kedua, 1995:478).
4. Mesin Konveyor : Mesin yang digunakan untuk membawa atau memindahkan barang (KBBI Edisi Kedua,1995:524).
G. SISTEMATIKA SKRIPSI
Sistematika skripsi digunakan untuk memperjelas dalam penyusunan skripsi. Adapun sistematika yang digunakan dalam skripsi ini adalah sebagai berikut:
Bab I Pendahuluan
Bab ini berisi Latar Belakang, Pembatasan Masalah, Permasalahan, Penegasan istilah, Tujuan Penelitian, Manfaat Penelitian, dan Sistematika Skripsi.
Bab II Landasan Teori Dan Hipotesis
Bab ini dijelaskan tentang teori PLC, Penerapan PLC sebagai sistem kendali pada mesin konveyor, dan Kerangka Berpikir.
Bab III Metode Penelitian
Bab ini berisi Metode Penelitian, Variabel Penelitian, Waktu dan Tempat Penelitian, Instrumen Penelitian, Alur Penelitian, Metode Pengumpulan data dan Metode Analisis Data.
Bab IV Hasil Penelitian Dan Pembahasan
Bab ini berisi penyajian data yang berupa Hasil Penelitian dan Pembahasan dengan menggunakan metode yang digunakan sebagai analisis yaitu diskriptif prosentase serta Keterbatasan Penelitian.
Bab V Simpulan Dan Saran
Bab ini berisi ungkapan kembali pokok persoalan beserta hasilnya secara singkat serta berisi keinginan penulisan menyampaikan suatu gagasan yang belum tercapai dalam tujuan penelitian demi perbaikan.
6
A. PLC (PROGRAMMABLE LOGIC CONTROLLER)
1. Pengertian PLC
Suatu industri akan membutuhkan hasil produksi yang semaksimal dan seefisien mungkin, sehingga untuk memenuhinya diperlukan peralatan kendali yang menunjang proses produksi maupun pendistribusiannya.
PLC adalah sebuah alat yang digunakan untuk menggantikan rangkaian sederetan relay yang dijumpai pada sistem kontrol proses konvensional (Eko Putra, Agfianto. 2004:1). PLC bekerja dengan cara mengamati masukan (melalui sensor-sensor terkait), kemudian melakukan proses dan melakukan tindakan sesuai yang dibutuhkan, yang berupa menghidupkan atau mematikan keluarannya (logic, 0 atau 1, hidup atau mati). Pengguna membuat program (dengan menggunakan ladder program atau diagram tangga) yang kemudian dijalankan oleh PLC yang bersangkutan.
PLC menentukan aksi apa yang harus dilakukan pada instrument keluaran berkaitan dengan status suatu ukuran atau besaran yang diamati. PLC adalah suatu piranti yang memiliki saluran masukan (input), saluran keluaran (output). Output yang dihasilkan ditentukan oleh status input dan program yang dimasukkan ke dalamnya. input dapat berupa relay, limit switch, photo switch maupun proximity switch.
Input dimasukkan kedalam program PLC kemudian akan menghasilkan output berupa relay-relay maupun kontaktor. PLC berisi
rangkaian elektronika digital yang dapat difungsikan seperti Normally Open (NO) dan bentuk kontak Normally Close (NC) relay.
Perbedaan PLC dengan relay yaitu nomor kontak relay (NC atau NO) pada PLC dapat digunakan berkali-kali untuk semua instruksi dasar selain instruksi output. Jadi dengan kata lain, bahwa dalam suatu pemrograman PLC tidak diijinkan menggunakan output dengan nomor kontak yang sama.
2. Keuntungan dari PLC
Keuntungan PLC menurut Factory Automatic Omron (CPM 1 Training Manual, 1998:8) adalah sebagai berikut :
a. Lama pengerjaan untuk sistem baru desain ulang lebih singkat.
b. Modifikasi sitem tanpa tambahan biaya yang masih ada input dan output. c. Perkiraan biaya suatu sistem desain baru lebih pasti.
d. Relatif mudah untuk dipelajari.
e. Desain sistem baru mudah untuk dimodifikasi dan aplikasi PLC sangat luas.
f. Mudah dalam hal perawatan (maintenance) dan sangat handal. g. Standarisasi sistem control mudah diterapkan.
3. Sistem PLC
Sistem PLC memiliki tiga komponen utama yaitu unit prosesor, bagian masukan/keluaran, dan perangkat pemrograman. Fungsi kerja dari ketiga komponen tersebut digambar secara diagram pada gambar berikut :
Gambar 1. Diagram kerja tiga komponen utama sistem PLC.
Sumber : Irianto Tj, Tri. 2005. Modul Pengenalan Dasar PLC (Programmable Logic Controllers) dan Dasar Pemrograman Syswin 3.2
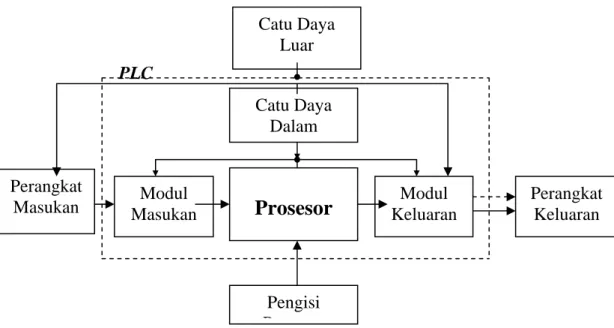
Diagram kerja tiga komponen utama sistem PLC diatas, akan lebih dijelaskan lebih rinci dengan gambar diagram blok sistem PLC seperti terlihat pada gambar berikut:
PLC
Gambar 2. Diagram Blok Sistem PLC
Sumber : Irianto Tj, Tri. 2005. Modul Pengenalan Dasar PLC (Programmable Logic Controllers) dan Dasar Pemrograman Syswin 3.2
Prosesor
Catu Daya Luar Modul Keluaran Perangkat Keluaran Modul Masukan Perangkat Masukan Pengisi P Catu Daya DalamUnit Prosesor Devais Pemrograman
Bagian masukan/keluaran Keluaran
Kendali Masukan
Urutan kerja dari gambar diagram blok diatas dimulai dari perangkat masukan yang akan memberikan sinyal pada modul masukan. Sinyal tersebut diteruskan ke prosesor dan akan diolah sesuai dengan program dibuat. Sinyal dari prosesor kemudian diberikan ke modul keluaran untuk mengaktifkan perangkat keluaran.
a. Perangkat dan Modul Masukan
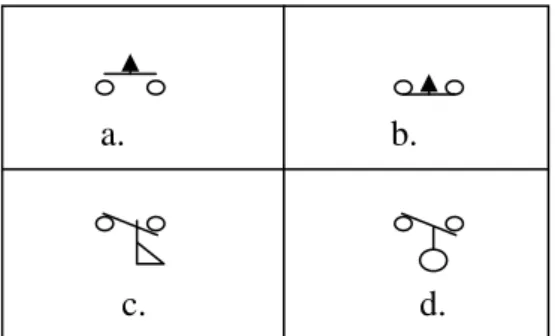
Perangkat masukan merupakan perangkat keras yang dapat digunakan untuk memberikan sinyal kepada modul masukan. Sistem PLC dapat memiliki jumlah perangkat masukan sesuai dengan sistem yang diinginkan. Fungsi dari perangkat masukan untuk memberikan perintah khusus sesuai dengan kinerja perangkat masukan yang digunakan, misalnya menjalankan atau menghentikan motor. Dalam hal tersebut seperti misalnya, perangkat masukan yang digunakan adalah push button yang bekerja secara Normally Open (NO) ataupun Normally Close (NC). Ada bermacam-macam perangkat masukan yang dapat digunakan dalam pembentukan suatu sistem kendali seperti misalnya : selector switches, foot switches, flow switches, proximity sensors dan lain-lain. Gambar 3 memperlihatkan simbol-simbol perangkat masukan yang sering digunakan pada sistem kendali.
Gambar 3. Simbol Perangkat masukan PLC Keterangan :
a. NO Pushbutton c. NO Flow Switch b. NC Pushbutton d. NO Pressure Switch
Sumber : Irianto Tj, Tri. 2005. Modul Pengenalan Dasar PLC (Programmable Logic Controllers) dan Dasar Pemrograman Syswin 3.2.
Modul masukan adalah bagian dari sistem PLC yang berfungsi memproses sinyal dari perangkat masukan yang kemudian memberikan sinyal tersebut ke prosesor. Suatu sistem PLC dapat memiliki beberapa modul masukan. Masing-masing modul dapat mempunyai jumlah terminal masukan tertentu, yang berarti modul tersebut dapat melayani beberapa perangkat masukan. Pada umumnya modul masukan ditempatkan pada sebuah rak.
b. Prosesor
Prosesor adalah bagian pemroses dari sistem PLC yang akan membuat keputusan logika. Keputusan yang telah dibuat berdasarkan pada program yang telah disimpankan pada memori. Prosesor adalah bagian dari Central Processing Unit (CPU) dari PLC yang akan menerima, menganalisa, memproses dan memberikan informasi kemodul
a. b.
keluaran. Didalam CPU PLC dapat dibayangkan seperti kumpulan dari ribuan relay. Hal tersebut bukan berarti didalamnya terdapat banyak relay dalam ukuran yang sangat kecil tetapi berisi rangkaian elektronika digital yang dapat difungsikan sebagai kontak NO dan NC relay.
Memori berfungsi sebagai tempat dimana informasi tersebut disimpan. Ada bermacam-macam jenis serpih memori dalam bentuk Integrated Circuits (IC). Masing-masing jenis memori memiliki keuntungan dan kerugian dan dipilih untuk spesifikasi yang terbaik sesuai dengan aplikasinya.
Salah satu jenis memori yang digunakan dalam CPU PLC adalah Random Access Memory (RAM). Satu kerugian dari jenis memori tersebut adalah diperlukannya catu daya untuk menjaga agar memori tetap bekerja. Pada aplikasi PLC diperlukan catu daya cadangan yang digunakan untuk menjaga agar isi dari memori tidak hilang apabila tiba-tiba catu daya hilang. RAM sering digunakan untuk keperluan memori karena RAM mudah diubah dengan cepat ketika di bandingkan dengan jenis memori yang lain. RAM disebut juga sebagai memori baca/tulis, karena dengan RAM dapat dibaca dan ditulis data untuk disimpan di RAM.
Read Only Memory (ROM) adalah jenis memori yang semi permanen dan tidak dapat diubah dengan pengubah program. Memori tersebut hanya digunakan untuk membaca saja dan jenis memori tersebut
tidak memerlukan catu daya cadangan karena isi memori tidak hilang meskipun catu daya terputus.
Programmable Read Only Memory (PROM) adalah jenis lain dari memori yang bekerja hampir menyerupai ROM, dengan satu pengecualian yaitu bisa diprogram. PROM di rancang untuk diisi dengan program yang terprogram. Apabila data dapat diubah, maka dapat diadakan pemrograman. Pemrograman ulang dari PROM, membutuhkan perlengkapan khusus yaitu PROM Programmer dimana PLC sendiri tidak dapat melakukannya.
c. Perangkat dan Modul Keluaran
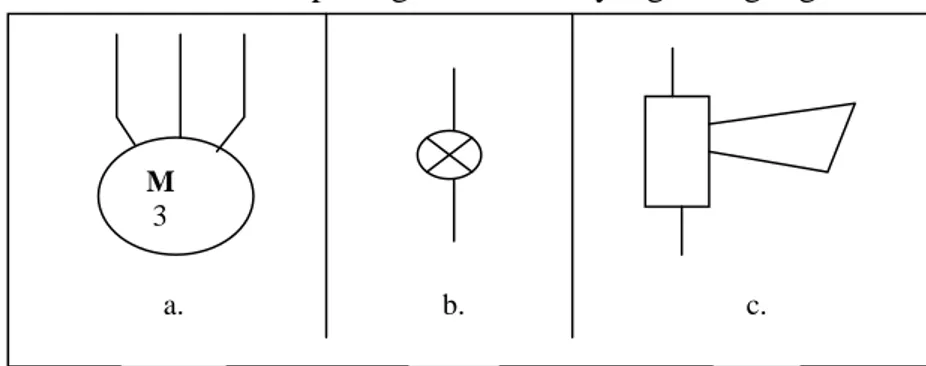
Perangkat keluaran adalah komponen-komponen yang memerlukan sinyal untuk mengaktifkan komponen tersebut. Pada sistem PLC dapat mempunyai beberapa perangkat keluaran seperti motor listrik, lampu indikator, sirine dan lain-lain. Gambar 2.8 memperlihatkan contoh-contoh simbol dari perangkat keluaran yang sering digunakan.
Gambar 4. Contoh-contoh simbol perangkat keluaran
M
3
Keterangan :
a. Simbol motor listrik b. Lampu Indikator c. Sirine/Alarm
Sumber : Irianto Tj, Tri. 2005. Modul Pengenalan Dasar PLC (Programmable Logic Controllers) dan Dasar Pemrograman Syswin 3.2
PLC dapat memliki beberapa modul keluaran tergantung dari ukuran yang ada dan aplikasinya pada sistem kendali. Perangkat keluaran disambungkan ke modul keluaran dan akan aktif pada saat sinyal diterima oleh modul keluaran dari prosesor sesuai dengan program sistem kendali yang telah diisi ke memorinya. Catu daya yang digunakan untuk mengaktifkan perangkat keluaran tidak langsung dari modul keluaran tetapi berasal dari catu daya luar, sehingga modul keluaran sebagai saklar yang akan menyalurkan catu daya dari catu daya luar ke perangkat keluaran.
d. Catu Daya
Sistem PLC memiliki dua macam catu daya dibedakan berdasarkan fungsi dan operasinya yaitu catu daya dalam dan catu daya luar. Catu daya dalam merupakan bagian dari unit PLC itu sendiri sedangkan catu daya luar yang memberikan catu daya pada keseluruhan bagian dari sistem termasuk didalamnya untuk memberikan catu daya pada catu daya dalam dari PLC. Catu daya dalam akan mengaktifkan proses kerja pada PLC. Besarnya tegangan catu daya yang dipakai disesuaikan dengan karakteristik PLC. Bagian catu daya dalam pada PLC
sama dengan bagian-bagian yang lain dimana terdapat langsung pada satu unit PLC atau terpisah dengan bagian yang lain. Catu daya dalam PLC adalah menggunakan.
e. Pengisi Program
Pemrograman PLC adalah memasukkan instruksi-instruksi dasar PLC yang telah membentuk logika pengendalian suatu sistem kendali yang diinginkan. Bahasa pemrograman biasanya telah disesuaikan dengan ketentuan dari pembuat PLC itu sendiri. Dalam hal ini setiap pembuat PLC memberikan aturan-aturan tertentu yang sudah disesuaikan dengan pemrograman CPU yang digunakan pada PLC tersebut.
Program yang digunakan dalam pemrograman PLC tergantung dari jenis atau merk PLC itu sendiri, karena PLC yang akan dijadikan sebagai bahan penelitian menggunakan PLC merk Omron maka program yang digunakan adalah Syswin. Sedangkan seri Syswin yang digunakan adalah Syswin 3.2. Program yang akan dimasukkan ke dalam PLC sebagai perintah adalah menggunakan Diagram Tangga (Ladder Diagram).
Ladder logic adalah bahasa pemrograman dengan bahasa grafik atau bahasa yang digambar secara grafik. Pemrogram dengan mudah menggambar skematik diagram dari program pada layar. Hal tersebut menyerupai diagram dasar yang digunakan pada logika kendali sistem kontrol panel dimana ketentuan instruksi terdiri dari koil-koil, NO, NC dan dalam bentuk penyimbolan. Pemrograman tersebut akan
memudahkan pemrogram dalam mentransisikan logika pengendaliannya khususnya bagi para pemrogram yang telah memahami logika pengendalian sistem kontrol panel. Simbol-simbol tersebut tidak dapat dipresentasikan sebagai komponen tetapi dalam pemrogramannya simbol-simbol tersebut dipresentasikan sebagai fungsi dari komponen sebenarnya. Instruksi-instruksi yang digunakan pada pemrograman akan dibahas lebih lanjut pada sub bab dibawah ini.
f. Instruksi Dasar PLC dengan Menggunakan Ladder Diagram
Semua instruksi (perintah program) merupakan instruksi dasar pada PLC. Pada akhir program harus terdapat instruksi dasar END yang oleh PLC dianggap sebagai batas akhir dari program. Instruksi tersebut tidak ditampilkan pada tombol operasional programming console, akan tetapi berupa sebuah fungsi yaitu FUN(01).
1) LD (Load) dan LD NOT (Load not)
Simbol diagram ladder seperti dibawah ini :
Gambar 5. Load (LD) Gambar 6. Load Not (LD NOT)
Load adalah sambungan langsung dari line dengan logika pensakelarannya seperti sakelar NO sedangkan LD NOT logika pensakelarannya adalah seperti sakelar NC. Instruksi ini dibutuhkan jika urutan kerja pada suatu sistem kendali hanya membutuhkan satu kondisi logic saja untuk mengeluarkan satu keluaran.
2) AND dan AND NOT
Simbol diagram ladder seperti dibawah ini :
Gambar 7. AND Gambar 8. AND NOT
Apabila memasukkan logika AND maka harus ada rangkaian yang berada di depannya, karena penyambungannya seri. Logika pensakelarannya AND seperti sakelar NO dan AND NOT seperti sakelar NC. Instruksi tersebut dibutuhkan jika urutan kerja pada suatu sistem kendali membutuhkan lebih dari satu kondisi logic yang harus terpenuhi semuanya untuk memperoleh satu keluaran.
3) OR dan OR NOT
Simbol diagram ladder seperti dibawah ini :
Gambar 9. OR Gambar 10. OR NOT
OR dan OR NOT dimasukkan seperti sakelar yang posisinya paralel dengan rangkaian sebelumnya. Instruksi tersebut dibutuhkan jika sequence pada suatu sistem kendali membutuhkan salah satu saja dari beberapa kondisi logic yang terpasang paralel untuk mengeluarkan satu keluaran. Logika OR logika pensakelarannya adalah seperti sakelar NO dan OR NOT logika pensakelarannya seperti sakelar NC.
AND AND NOT
OR NOT OR
4) OUT
Simbol diagram ladder seperti dibawah ini :
Gambar 11. OUT
Out digunakan sebagai keluaran dari beberapa instruksi yang terpasang sebelumnya yang telah membentuk suatu logika pengendalian tertentu. Logika pengendalian dari instruksi OUT sesuai dengan pemahaman pengendalian sistem PLC yang telah dibahas diatas dimana instruksi OUT ini sebagai koil relay yang mempunyai konak di luar perangkat lunak. Sehingga jika OUT memperoleh sinyal dari instruksi program yang terpasang maka kontak di luar perangkat lunak akan bekerja.
5) AND LD (AND Load)
Simbol diagram ladder seperti dibawah ini :
Gambar 12. AND Load (AND LD)
Penyambungan AND LD terlihat pada gambar tersebut diatas, dimaksudkan untuk mengeluarkan satu keluaran tertentu.
6) OR LD (OR Load)
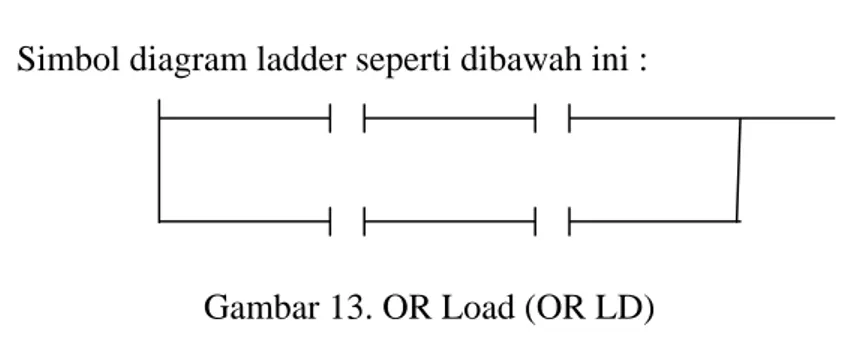
Simbol diagram ladder seperti dibawah ini :
Gambar 13. OR Load (OR LD)
Sistem penyambungannya seperti gambar diatas pada prisnsipnya sama dengan AND NOT, dimana untuk memberikan keluaran sesuai dengan instruksi yang telah terpasang pada gambar tersebut.
7) TIMER (TIM) dan COUNTER (CNT)
Timer/Counter pada PLC Omron jenis CPM 1A berjumlah 128 buah yang bernomor TC 000 sampai TC 127 (tergantung tipe PLC). Jika suatu nomor sudah dipakai sebagai Timer/Counter, maka nomor tersebut tidak boleh dipakai lagi sebagai Timer ataupun Counter yang lain.
a) Nilai Timer/Counter pada PLC bersifat countdown (menghitung mundur) dari nilai awal yang ditetapkan oleh program. Setelah hitungan mundur tersebut mencapai angka nol, maka kontak NO Timer/Counter akan bekerja.
b) Timer mempunyai batas antara 0000 sampai dengan 9999 dalam bentuk BCD (Binary Code Decimal) dan dalam orde sampai 100 ms. Counter mempunyai orde angka BCD dan mempunyai batas antara 0000 sampai dengan 9999.
Gambar13. Simbol Diagram Ladder
4. Bagian-bagian PLC
CPU adalah otak dari PLC, merupakan tempat mengolah program sehingga sistem control yang telah didesain akan bekerja seperti yang diprogramkan. Bagian – bagian dari PLC adalah sebagai berikut :
a. Terminal Input Power Supply
Terminal Input Power Supply adalah terminal untuk memberi tegangan sumber dari CPU ke Power Supply (100 sampai 240 VAC atau VDC).
b. Terminal Ground fungsional (Fungtional earth Terminal)
Terminal Ground fungsional (Fungtional earth Terminal) adalah terminal yang harus masuk ground jika menggunakan tegangan sumber AC. Keterangan : N = Nomor TIM/CNT SV = Set Value CP = Pulsa R = Reset TIM N SV CNT N SV CP R TIMER COUNTER
c. Terminal Output power supply
Satu buah CPM dengan tegangan sumber AC dengan dilengkapi output 24 V DC untuk mensuplai tegangan-tegangan.
d. Terminal masukan (terminal input)
Terminal masukan (terminal input) adalah terminal yang menghubungkan kerangkaian input.
e. Terminal keluaran (terminal output)
Terminal keluaran (terminal output) adalah terminal yang menghubungkan kerangkaian output
f. Indikator PC
Indikator yang menampilkan status opersi atau mode dari PC. g. Terminal Ground pengaman (protective out terminal)
Terminal Ground pengaman (protective out terminal) adalah terminal pengaman ground untuk mengurangi resiko kejutan listrik.
h. Indikator masukan
Menyala saat terminal koresponden ON. i. Indikator keluaran
Indikator keluaran menyala saat terminal output koresponden menyala ON.
j. Peripheral Port
k. Expansion I/O
Penghubung CPU ke expansion I/O unit untuk menambah 12 input dan 8 output extra.
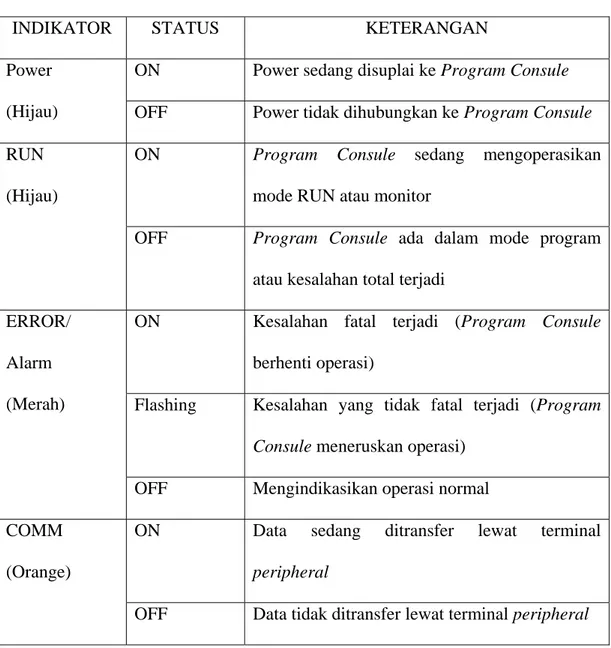
Tabel 1. Indikator status pada CPM 1A
INDIKATOR STATUS KETERANGAN
ON Power sedang disuplai ke Program Consule Power
(Hijau) OFF Power tidak dihubungkan ke Program Consule ON Program Consule sedang mengoperasikan
mode RUN atau monitor RUN
(Hijau)
OFF Program Consule ada dalam mode program atau kesalahan total terjadi
ON Kesalahan fatal terjadi (Program Consule berhenti operasi)
Flashing Kesalahan yang tidak fatal terjadi (Program Consule meneruskan operasi)
ERROR/ Alarm (Merah)
OFF Mengindikasikan operasi normal
ON Data sedang ditransfer lewat terminal peripheral
COMM (Orange)
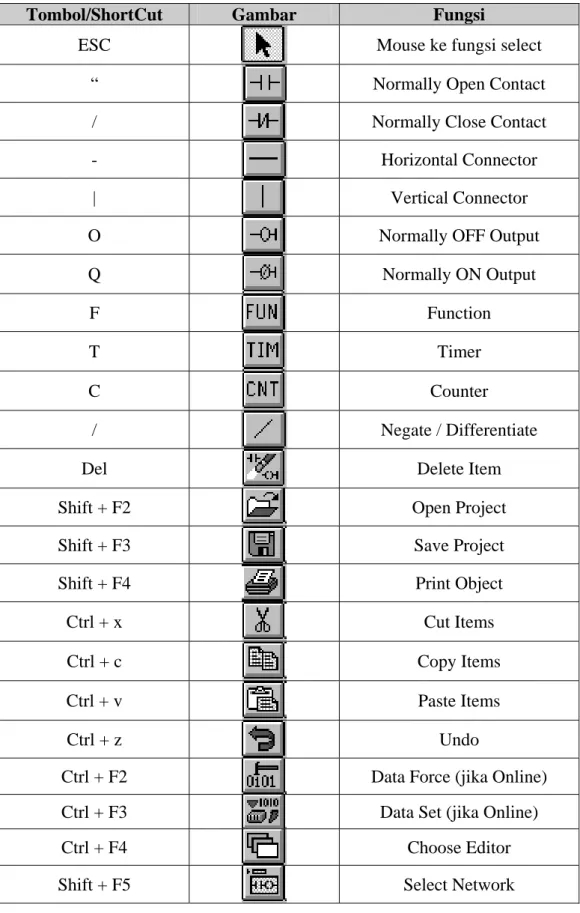
Tabel 2. Ringkasan penggunaan tombol-singkat (ShortCut)
Tombol/ShortCut Gambar Fungsi
ESC Mouse ke fungsi select
“ Normally Open Contact
/ Normally Close Contact
- Horizontal Connector
| Vertical Connector
O Normally OFF Output
Q Normally ON Output
F Function
T Timer
C Counter
/ Negate / Differentiate
Del Delete Item
Shift + F2 Open Project
Shift + F3 Save Project
Shift + F4 Print Object
Ctrl + x Cut Items
Ctrl + c Copy Items
Ctrl + v Paste Items
Ctrl + z Undo
Ctrl + F2 Data Force (jika Online) Ctrl + F3 Data Set (jika Online)
Ctrl + F4 Choose Editor
Shift + F6 / Alt + Ins Insert Network Shift + F7 / Alt + Del Delete Network Shift + F8 / Alt + Enter Test Network
Ctrl + F5 Block Manager
Ctrl + F6 Edit Address Symbols
Ctrl + F7 Edit Network Symbols
Ctrl + F8 Statement List
Shift + F9 Communications Connect
Shift + F10 PLC Mode (jika Online) Ctrl + F11 Monitoring (jika Online) Shift + F11 Online Edit (jika Online)
Shift + F12 Overview Mode
B. PENERAPAN PLC PADA MESIN KONVEYOR
Penerapan PLC pada mesin konveyor adalah memanfaatkan PLC untuk digunakan sebagai sistem pengendali otomatis pada mesin konveyor.
1. Spesifikasi dan Karakteristik PLC
PLC bekerja dengan cara mengamati masukan (melalui sensor-sensor terkait), kemudian melakukan proses dan melakukan tindakan sesuai yang dibutuhkan, yang berupa menghidupkan atau mematikan keluarannya (logic, 0 atau 1, hidup atau mati). Pengguna membuat program (dengan menggunakan ladder program atau diagram tangga yang dalam aplikasinya di komputer menggunakan program Syswin 3.4) yang kemudian dijalankan oleh PLC yang bersangkutan.
Spesifikasi karakteristik PLC yang akan digunakan dalam pembuatan conveyor ini menggunakan PLC merk OMRON Sysmac series CPM 1A. Pada pembuatan rancang bangun miniature sistem pemindah barang dengan menggunakan PLC ini, yang akan digunakan adalah PLC dengan spesifikasi dan karakteristik sebagai berikut :
a. Spesifikasi
Merek : OMRON Sysmac series CPM 1A
Model : 20 CDR A
Tegangan Suplai : 100 - 240 V AC Frekuensi : 50 -60 Hz
Daya : 30 VA
Arus Input : 5 mA / 12 mA
Tegangan Output : 24 V DC (RCS), 250 V AC (GEN) b. Karakteristik
Metode kontrol : Metode penyimpan program
Bahasa pemrograman : Ladder Diagram menggunakan program Syswin 3.4
Panjang Instruksi : 1 set setiap instruksi (1-5) word / instruksi Kapasitas program : 2048 words
Max I/O point : 50 Output : 8 buah Input : 12 buah Kecepatan : 0,72 - 16,2 Ms
I INNPPUUTTTTEERRMMIINNAALL O OUUTTPPUUTTTTEERRMMIINNAALL I INNPPUUTTIINNDDIICCAATTOORR O OUUTTPPUUTTIINNDDIICCAATTOORR S STTAATTUUSSIINNDDIICCAATTOORR P PEERRIIPPHHEERRAALLPPOORRTT
Gambar15. Gambar OMRON CPM 1A
PLC menentukan aksi apa yang harus dilakukan pada instrument keluaran berkaitan dengan status suatu ukuran atau besaran yang diamati.
2. Catu Daya
Catu daya adalah pesawat atau alat yang mampu mengubah tegangan arus bolak-balk menjadi arus searah (DC). Catu daya yang digunakan dalam pembuatan alat ini digunakan untuk mengaktifkan kerja LDR yang membutuhkan daya 12 volt, selain itu juga digunakan sebagai catu daya luar PLC yang dimasukkan dalam keluaran PLC untuk mengaktifkan kerja relai 24 volt sebagai pemicu kerja motor dan kerja Selenoid Valve.
3. Perencanaan Perangkat Lunak
Perangkat lunak akan digunakan untuk mengendalikan kerja dari pergerakan konveyor yang berbasis PLC ini. Berikut ini program yang akan digunakan dalam pembuatan dalam desain pembuatan konveyor. a. Diagram Ladder
Diagram ini dibuat untuk rancangan atau desain sistem pengendalian pada PLC yang kemudian diagram Ladder ini dibuat dalam data mnemonic untuk ditransfer ke CPU PLC melalui Programing Consule atau melalui Kabel Data komputer. Program Ladder yang dibuat dengan menggunakan program Sywin 3.2 akan dipindahkan langsung ke dalam memori PLC sehingga bisa langsung digunakan tanpa harus menggunakan Programming Consule.
Biasanya Ladder ini dibuat setelah dibuatnya rangkaian konvensional dan disadur ke dalam Ladder diagram, sehingga mempermudah dalam mendesain suatu rancangan pengendali. Pada sistem pengendali konveyor berbasis PLC, Diagram Laddernya
menyusul setelah rangkaian telah terpasanng semua. Apabila pemrograman PLC yang dilakukan dengan menggunakan Programming Consule maka diagram Laddernya harus diteerjemahkan dulu ke dalam table mnemonic untuk transfer program dari Programming Consule ke CPU PLC.
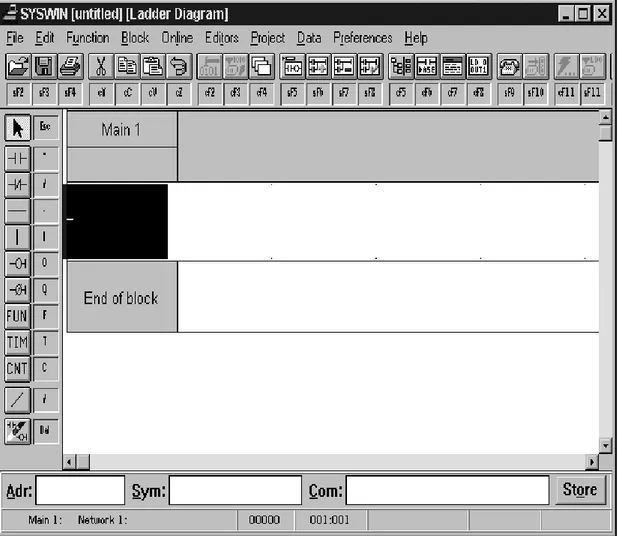
b. Memasukkan Program Syswin 3.2 ke dalam PLC
1) Apabila mengaktifkan Syswin 3.2 akan memunculkan gambar program seperti di bawah ini:
Gambar 16. Tampilan awal program Syswin 3.2
Mulailah dengan menu File Æ New Project, sehingga akan dimunculkan kotak dialog sebagai berikut:
Gambar 17. Tampilan menu awal project Syswin 3.2
Sumber : Software program Syswin 3.2
Lakukan seting seperti pada gambar di atas.
Mulailah melakukan penggambaran diagram Ladder, lihat Ringkasan tombol/shortcut.
2) Setelah melakukan pembuatan program, langkah selanjutnya yang dilakukan adalah dengan melakukan koneksi/hubungan antara PLC dengan computer, untuk memindahkan program yang telah jadi ke dalam PLC. Alat yang dibutuhkan untuk melakukan pemindahan program adalah: Adapter Port Periphereal dan kabel penghubung Port RS-232 C.
3) Beberapa perintah program yang penting dan perlu dipahami pada saat PLC dalam status terhubung dengan computer :
a) Connect
Merupakan perintah program untuk menyambungkan antara computer dengan PLC.
b) Up load Program
Merupakan perintah untuk melihat isi program yang sudah ada dalam PLC.
c) Down Load Program
Merupakan perintah untuk mentransfer program yang telah dibuat ke dalam PLC.
d) Mode
Dalam perintah Mode ini terdapat 3 pilihan kerja bagi PLC yaitu:
Monitor
Perintah untuk melihat kondisi PLC pada saat bekerja. Run
Perintah untuk menjalankan program yang telah ditransfer ke dalam PLC
Stop
Perintah untuk menghentikan program yang sedang dijalankan di PLC.
4) Memasukkan Program ke dalam PLC
Mengatur komunikasi serial dengan PLC melalui menu Projects Æ Communications (lakukan seting seperti gambar berikut):
Gambar 18. Tampilan menghubungkan PLC dengan komputer Sumber : Software program Syswin 3.2
Untuk melakukan koneksi dengan PLC gunakan Online Æ Connect ! (tombol-tombol berikut hanya aktif jika sudah On-line)
a) b) c) d)
Gambar 19. Tampilan Menu Port Communication Sumber : Software program Syswin 3.2
Keterangan:
¾ Communications Connect: untuk melakukan koneksi dengan PLC yang bersangkutan;
¾ PLC Mode: untuk memilih mode kerja dari PLC yang bersangkutan, jika diklik akan dimunculkan pilihan:
Gambar 20. Tampilan menu monitoring program pada saat PLC ON Sumber : Software program Syswin 3.2
¾ Monitoring: untuk melakukan monitoring kerja PLC melalui komputer, contoh tampilan:
Gambar 21. Tampilan Menu monitoring Program Syswin 3.2 Sumber : Software program Syswin 3.2
Komponen Konveyor
1. Penggerak Konveyor
Komponen dari konveyor yang dibuat adalah sebagai berikut : a. Motor Listrik AC 0,5 PK/HP
Putaran motor listrik 1400 rpm. Putaran ini direduksi oleh reducer sehinga menjadi 116 rpm.
b. Roll Konveyor c. Gear (Pulley)
Ada 4 gear. 1 pada motor, 2 pada reducer, 1 pada roll utama konveyor. d. Belt Konveyor
Lebar belt : 20 cm terbuat dari bandrefill. e. Belt Penghubung Motor dengan konveyor
Ada 2 :
1) Belt penghubung motor dengan reducer. Mempunyai ukuran 26 2) Belt penghubung motor dengan reducer. Mempunyai ukuran 39 f. Gear Reducer
Perbandingannya 1:20 artinya 20 putaran motor sama dengan 1 putaran reducer
g. Rangka Konveyor
2. Pneumatik
Istilah pneumatik berasal dari Yunani, yaitu ‘Pneuma’ yang berarti napas atau udara. Istilah pneumatik selalu berhubungan dengan teknik penggunaan udara bertekanan, baik tekanan di atas 1 atm atau kurang dari
1 atm. Sehingga Pneumatik dapat diartikan sebagai teknik penggerak, pengaturan, penghubung, pengembalian dan perentang yang mengambil gaya dan penggeraknya dari udara mampat. Udara mampat sendiri adalah atmosfer yang diisap oleh kompressor dan dimampatkan dari tekanan normal (0,98 bar) sampai tekanan yang lebih tinggi (antara 4 sampai dengan 10 bar).(Dasar-Dasar Kontrol Pneumatik, 1985:13).
Pneumatik mengunakan kompresor sebagai penyuplai udara ke tabung pneumatik. Kompressor berfungsi untuk menghisap udara atmosfir kemudian dimampatkan ketabung penyimpan hingga tekanan tertentu. Sistem kontrol pneumatik beroperasi menggunakan media udara bertekanan dengan volume dan tekanan udara yang sesuai sistem tersebut. Dalam hal ini kompressor disebut juga sebagai pompa vakum.
3. Komponen Pendukung
a. Relay
Relay adalah saklar yang bekerja atas dasar kemagnetan kumparan, pada umumnya relay bekerja dengan tegangan DC maupun relay yang bekerja pada tegangan AC. jadi saklar pada relay bekerja karena pengaruh sistem kemagnetan pada kumparan. Medan magnet pada kumparan akan menarik pelat besi yang ada diatas kumparan (jangkar). Karena jangkar tersebut terkait dengan pengungkit saklar, maka ketika saklar bekerja pengungkit jangkarpun ikut bekerja. Pada relay input setiap saklar akan mengeluarkan dua output yaitu output
kondisi NC dan kondisi NO. Dengan demikian pada saat relay tidak bekerja terminal output NC terhubung dengan terminal input dan terminal NO terbuka. Namun sebaliknya apabila relay bekerja maka kondisi tersebut diatas akan berbalik keadaannya.
Relay yang digunakan dalam penelitian yang akan dilakukan adalah relay yang berupa masukan dari outputPLC yang berupa arus 24 DC yang digunakan untuk menyambung arus 220 AC yang menuju ke motor AC.
b. Tombol Tekan (Push Button)
Kedudukan kontak-kontak tombol tekan dibagi menjadi menjadi 2, yaitu:
1) Tombol Tekan Normally Open (NO)
Tombol tekan jenis ini adalah tombol tekan yang dalam keadaan normal kontaknya terbuka, bila ditekan maka akan menutup (dari NO menjadi NC) tetapi lidah kontak akan kembali keposisi semula (NO).
2) Tombol Tekan Normally Close (NC)
Cara kerja tombol ini kebalikan dari cara kerja tombol tekan NO yang telah dijelaskan.
c. Sensor Cahaya
Komponen utama dari rangkaian sensor cahaya ini adalah LDR (Light Dependent Resitor). LDR ini memiliki karakteristik bahwa bila ada cahaya yang jatuh padanya maka nilai tahanannya akan berkurang
dan akan naik tahanannya apabila intensitas cahanya berkurang. Prinsip kerja dari rangkaian LDR ini adalah LDR akan ditembak cahaya terus-menerus oleh cahaya, apabila ada benda yang memotong cahaya tersebut maka nilai tahanan LDR tersebut akan naik dan rangkaian bekerja untuk mengaktifkan relai dan memberi pulsa pada counter yang ada pada CPU PLC.
Prinsip kerja rangkaian sensor cahaya, barang dipindahkan dengan menggunakan konveyor akan menyentuh cahaya yang ditembakkan secara terus-menerus pada LDR terhalang cahaya oleh barang tersebut maka sensor cahaya yang terhubung dengan PLC tersebut akan memberikan informasi untuk memberi perintah pada bagian lain sesuai dengan order kerja yang ada pada CPU PLC.
Sensor cahaya ini nanti akan memiliki 3 jenis kerja yaitu:
1) Memutus arus yang menuju motor AC sehingga motor menjadi berhenti.
2) Mengalirkan arus menuju motor AC sehingga motor bekerja (motor hidup).
3) Memberi masukan PLC untuk menggerakkan pneumatik maju dan mundur.
Sensor ini diletakkan pada jalur yang dilewati barang hasil produksi yang dipindahkan melalui konveyor ini. Sensor yang dibutuhkan adalah 3 buah.
Gambar 24. Rangkaian Sensor Cahaya
B. Alur Kerja Konveyor Berbasis PLC
Masing-masing sistem akan dikendalikan oleh PLC OMRON CPM 1A. Hal ini dapat direalisasikan karena PLC ini memilki fasilitas hardware maupun software. Dengan fasilitas tersebut, PLC ini dapat menghasilkan keluaran arus sebesar 12 volt. Untuk dapat mengeluarkan sinyal tersebut diperlukan suatu program yang akan menjalankan jalannya sinyal keluaran sesuai yang diinginkan. Sebuah mesin konveyor dapat dijalankan secara otomatis dengan menggunakan PLC CPM 1 A sesuai variasi dengan mengubah arus yang terhubung pada masing-masing output. Kombinasi arus yang terhubung ke masing-masing komponen tersebut dapat dihasilkan oleh PLC dengan cara meberikan program sesuai pola gerakan atau variasi waktu
yang diinginkan. Karena sinyal keluaran dari PLC masih terlalu kecil unutk dapat menggerakkan konveyor secra keseluruhan, sehingga diperlukan suatu interface sebagai penambah tenaga keluaran PLC.
Perencanaan pembuatan program untuk menggerakkan konveyor ini adalah kombinasi antara waktu untuk menggerakkan motor dan menghentikan motor serta variasi waktu untuk menggerakkan Cylinder Pneumatik untuk melakukan pemindahan barang didalam siklus kerja konveyor. Untuk kombinasi kerja antara pemberhentian motor, pergerakan motor dan juga penggerak Pneumatiknya diberikan penundaan waktu atau jeda sehingga barang yang digunakan sebagai objek dalam konveyor dalam keadaan diam dahulu sebelum dipindahkan.
Diagram pengaturan konveyor ini dapat dilihat dari flowchart dibawah ini:
Gambar 25. Alur Masukan dan Keluaran Pengerjaan PLC
Sumber : Irianto Tj, Tri. 2005. Modul Pengenalan Dasar PLC (Programmable Logic Controllers) dan Dasar Pemrograman Syswin 3.2
C. KERANGKA BERPIKIR
Penelitian pada mesin konveyor ini akan dikendalikan oleh PLC OMRON CPM 1A. Hal ini dapat direalisasikan karena PLC ini memilki fasilitas hardware maupun software. Dengan fasilitas tersebut, PLC dapat menghasilkan keluaran arus sebesar 12 volt. Untuk dapat mengeluarkan sinyal tersebut diperlukan suatu program yang akan menjalankan sinyal keluaran yang diinginkan. Sebuah mesin konveyor dapat dijalankan secara otomatis dengan menggunakan PLC CPM 1 A sesuai variasi dengan mengubah arus yang terhubung pada masing-masing output. Kombinasi arus yang terhubung ke masing-masing komponen tersebut dapat dihasilkan oleh PLC dengan cara memberikan program sesuai pola gerakan atau variasi waktu yang diinginkan. Sinyal keluaran dari PLC masih terlalu kecil, untuk dapat menggerakkan konveyor secara keseluruhan maka diperlukan suatu interface sebagai penambah tenaga keluaran PLC.
Perencanaan pembuatan program untuk menggerakkan konveyor ini adalah kombinasi antara waktu untuk menggerakkan motor dan menghentikan motor serta variasi waktu untuk menggerakkan silinder pneumatik untuk melakukan pemindahan barang didalam siklus kerja konveyor. Untuk kombinasi kerja antara pemberhentian motor, pergerakan motor dan juga penggerak pneumatiknya diberikan penundaan waktu atau jeda sehingga barang yang digunakan sebagai objek dalam konveyor dalam keadaan diam dahulu sebelum dipindahkan.
Penelitian ini menggunakan 3 variabel sebagai variabel penelitian yaitu uji ON, OFF dan Belok 900. Uji ON adalah pengujian tombol start dengan jalannya motor AC berjalan. Uji OFF adalah pengujian saat motor AC mati dengan pemrograman dari PLC. Sedangkan uji Belok 900 adalh pengujian saat berpindahnya barang dari konveyor satu ke konveyor selanjutnya.
41 A. Metode Penelitian
Metode yang digunakan dalam penelitian ini adalah metode diskriptif prosentase yaitu mengambarkan keadaan dengan memasukkan hasil penelitian dalam prosentase hasil interpretasi.
B. Variabel Penelitian
Variabel penelitian yang digunakan ada 3 yaitu : 1. On
2. Off 3. Belok 900
4. Hubungan antara beban dengan laju
C. Tahap Penelitian
Penelitian dilakukan dalam 2 tahap : 1. Tahap Pembuatan Alat
Dilakukan pada Nopember 2005 s/d Pebruari 2006 di Laboratorium Pneumatik E9 Lt.2 Teknik Mesin Universitas Negeri Semarang.
2. Tahap Pengambilan Data
Dijadwalkan pada hari Senin 20 Pebruari 2006 dan hari Selasa 7 Maret 2006 di Laboratorium Pneumatik E9 Lt.2 Teknik Mesin Universitas Negeri Semarang.
3. Tahap Analisis Data
Dilakukan setelah selesai melakukan pengambilan data.
D. Instrumen Penelitian
Instrumen penelitian yang digunakan adalah PLC yang diterapkan pada
mesin konveyor yang telah dibuat sesuai dengan yang diinginkan. Disamping itu juga stop watch untuk mendapatkan waktu tempuh yang digunakan untuk menghitung beban dengan laju.
E. Alur Penelitian
Alur penelitian bermula saat PLC pada posisi reset, ada 3 proses
pengambilan data :
1. Tombol start di tekan sampai PLC bisa mengerakkan keluaran yang
berupa motor listrik AC. Jika motor berjalan dengan jeda antara tekan dan jalannya motor < 1 detik maka masukkan dalam kolom benar dengan nilai 2. Jika motor berjalan dengan jeda antara tekan dan jalannya motor ≥ 1 detik maka masukkan dalam kolom benar dengan nilai 1, sebaliknya jika motor mati maka masukkan dalam kolom salah dengan nilai 0. Hal ini diulang sampai 10 kali.
2. Barang mengenai sensor 1 dalam jeda waktu 2 detik motor akan berhenti.
PLC akan memberi keluaran untuk menghentikan motor listrik. Jika motor
berhenti dengan jeda waktu antara 2,5 – 3,5 detik setelah barang mengenai sensor maka masukkan dalam kolom benar dengan nilai 2. Jika motor berhenti dengan jeda waktu lebih dari 3,5 detik setelah barang mengenai sensor maka masukkan dalam kolom benar dengan nilai1 , sebaliknya jika motor masih berjalan maka masukkan dalam kolom salah dengan nilai 0. Hal ini diulang sampai 10 kali.
3. Setelah posisi motor listrik berhenti barang akan berhenti di depan
pneumatik 1. PLC akan memberi keluaran untuk mengerakkan pneumatik
1 untuk mendorong barang sampai konveyor selanjutnya. Jika pneumatik 1
bergerak dengan jeda waktu < 1 detik antara barang berhenti (OFF) dengan pneumatik 1 bergerak maju dan barang bisa bergerak 900 maka
masukkan dalam kolom benar dengan nilai 2. Jika pneumatik 1 bergerak
dengan jeda waktu ≥ 1 detik antara barang berhenti (OFF) dengan
pneumatik 1 bergerak maju dan barang bisa bergerak 900 maka masukkan
dalam kolom benar dengan nilai1 , sebaliknya jika pneumati 1 mati dan
barang tidak bisa bergerak 900 maka masukkan dalam kolom salah dengan nilai 0. Penelitian ini juga dilakukan 10 kali.
Mesin konveyor berbasis PLC ini juga bisa digunakan untuk
menghitung apakah ada hubungan antara beban dengan laju pergerakan konveyornya. Alur pengukurannya adalah awal mula sistem pada konveyor dinyalakan lewat pemrograman PLC yang telah dibuat melalui
Diagram Ladder. Konveyor akan berkerja apabila tombol start yang dijadikan sebagai sensor mula bekerja. Sebelum tombol start dipencet, terlebih dahulu tombol reset dipencet agar program kembali semula dan tidak mengganggu kerusakan kerja program PLC..Tombol start tersebut akan mengaktifkan motor sehingga barang yang dijadikan beban akan bergerak.
Pengukuran waktu dilakukan dari awal mula sensor menyentuh sensor pertama yang terletak sebelum pneumatik sampai motor berhenti. Pengukuran dilakukan dengan menggunakan stopwatch yang dijalankan
berdasar tombol start dipencet sampai motor berhenti. Jarak pengukuran adalah 1,55 meter, beban yang digunakan adalah antara 1-7 kg.
F. Metode Pengumpulan Data
Metode pengumpulan data yang digunakan adalah metode diskriptif eksperimen yang bisa berupa data kuantitatif maupun data kualitatif. Data yang dikumpulkan sebagai bahan analisis adalah saat PLC pada posisi ON
(Motor berjalan), OFF (Motor berhenti) dan barang membelok 900 dengan ketentuan nilai sebagai berikut :
1. PLC pada posisi ON (Motor berjalan)
Jeda Waktu Antara Tombol Start Ditekan dengan Motor Nyala
Nilai
< 1 Detik 1 (Benar)
2. PLC pada posisi OFF (Motor berhenti)
Jeda Waktu Antara Barang Mengenai Sensor dengan Motor Mati
Nilai
2,5 – 3,5 Detik 1 (Benar)
≥ 3,5 Detik 0 (Salah)
3. Barang membelok 900
Jeda Waktu Antara Motor Mati dengan
Pneumatik 1 Bergerak Maju
Nilai
< 1 Detik 1 (Benar)
≥ 1 Detik 0 (Salah)
Tabel 3. data uji ON, OFF, Belok 900
ON (Motor Berjalan) OFF (Motor Berhenti) Belok 900
Benar Salah Benar Salah Benar Salah Pengujian 1 0 1 0 1 0 1 2 3 4 5 6 7 8 9 10
Pada pengambilan data hubungan antara beban dengan laju pergerakan mesin konveyor, Data yang diambil adalah sebagai berikut:
Beban (X) Jarak tempuh (Meter) Waktu tempuh Rata-rata waktu tempuh Laju (Y) 1 2 3 4 5 6 7 1,55 G. Analisis Data
Penelitian mengenai “Penerapan PLC sebagai sistem kendali pada mesin
konveyor” adalah suatu penelitian yang membuktikan bisa atau tidaknya PLC
diterapkan dalam suatu mesin yang didesain sesuai yang diinginkan. Analisis data yang digunakan adalah menggunakan penelitian diskriptif. Penelitian diskriptif bertujuan untuk memberi gambaran suatu objek penelitian. Penggunaan analisis data menggunakan data kuantitatif dan kualitatif. Data
kuantitatif digunakan untuk menghitung jumlah centangan yang terdapat dalam kolom. Data kualitatif berupa keterangan atau alasan sesuatu itu bisa terjadi.
Analisis data merupakan cara mengolah data untuk mengetahui hasil akhir penelitian. Penelitian ini mengunakan analisis deskriptif yaitu mengamati langsung hasil eksperimen kemudian menyimpulkan dan menentukan hasil penelitian.
1. Teknik Penyajian Data
Tujuan penelitian akan sesuai dengan yang diharapkan jika data yang telah terkumpul dianalisis sebagai berikut:
a. Memeriksa dan meneliti data-data yang telah terkumpul.
b. Mengkategorikan data-data yang sesuai dengan kriteria serta hal-hal yang diperlukan dalam suatu pendataan. Hasil penelitian ini dimasukkan dalam tabel yang telah disiapkan.
2. Analisis Data
Data yang diperoleh kemudian disajikan berdasarkan diskriptif prosentase kedalam nilai 1 (benar) dan 0 (salah). Secara umum analisis data yang digunakan adalah secara kualitatif yaitu analisis yang tidak didasarkan pada perhitungan statistik, tetapi dalam bentuk pernyataan dan uraian yang selanjutnya akan disusun secara sistematis dalam bentuk skripsi. Data dalam penelitian ini juga dapat dibuat klasifikasi sendiri tentang tingkat keberhasilan penelitian.
48
A. Hasil Penelitian 1. Diskriptif Data
Penelitian ini menghasilkan data-data yang berupa benar atau salah. Data yang dihasilkan adalah :
Tabel 4. Hasil Penelitian
Pengujian ON OFF Belok 90 0
1 Benar Benar Salah
2 Benar Benar Benar
3 Benar Benar Benar
4 Benar Benar Benar
5 Benar Benar Benar
6 Benar Benar Benar
7 Benar Benar Benar
8 Benar Benar Benar
9 Benar Benar Benar
10 Benar Benar Benar
Untuk pengujian hubungan beban dengan laju pergerakan konveyor. Data yang dihasilkan adalah sebagai berikut :
Beban (Kg) Laju (m/dt) (X) Jarak Tempuh (m) Waktu Tempuh (dt) Rata - Rata Waktu Tempuh (dt) (Y) XY X2 Y2 11.86 11.89 1 11.87 11.87 0.131 0.131 1 0.017 11.64 11.67 2 11.69 11.67 0.133 0.266 4 0.018 11.85 11.90 3 11.87 11.87 0.131 0.392 9 0.017 11.92 12.02 4 11.94 11.96 0.130 0.518 16 0.017 12.21 12.20 5 12.21 12.21 0.127 0.635 25 0.016 12.37 12.34 6 12.33 12.35 0.126 0.753 36 0.016 12.43 12.42 7 1.55 12.48 12.44 0.125 0.872 49 0.016 ∑ X ∑ t ∑ Y ∑ XY ∑ X2 ∑ Y2 28 84.370 0.901 3.566 140 0.116
2. Analisis Data
Dari data yang dihasilkan menunjukkan bahwa :
a. Pengujian 1 atau ON, PLC menghasilkan data benar sebesar 100%. b. Pengujian 2 atau OFF, juga dihasilkan data yang sama yaitu 100%. c. Pada pengujian yang ke-3 menghasilkan data benar 90%.
Dengan demikian maka PLC yang digunakan dapat diterapkan pada mesin konveyor yang dibuat sesuai dengan yang diinginkan.
100 100 90 84 86 88 90 92 94 96 98 100 PR O S EN T A S E ( % ) ON OFF BELOK 90 VARIABEL
Gambar 24. Grafik Pengujian ON, OFF, Belok 900
Disamping itu juga mesin konveyor yang dibuat dapat digunakan untuk menghitung hubungan antara beban dengan laju karena dari data yang dihasilkan menunjukkan bahwa semakin besar beban maka semakin kecil laju yang dihasilkan. Hal ini menunjukkan bahwa ada hubungan antara beban dengan laju pergerakan mesin konveyor.
0.131 0.133 0.131 0.130 0.127 0.126 0.125 0.120 0.122 0.124 0.126 0.128 0.130 0.132 0.134 1 2 3 4 5 6 7 Beban (Kg) L aju ( M /D et ik )
Gambar 25. Grafik Hubungan Antara Beban dengan Laju
B. Pembahasan Hasil Penelitian
Hasil pengujian ON, OFF, Belok 900 menunjukkan bahwa :
1. Pengujian pertama saat PLC memberi keluaran untuk pengujian On maka motor listrik berjalan. Hasil pengujian menunjukkan 100% pengujian On untuk PLC berhasil.
2. Pengujian yang kedua pada saat motor listrik berhenti atau OFF juga sama. Pengujian ini menghasilkan data benar 10 kali (100%).
3. Pengujian yang ketiga berupa belok 900 ada satu pengujian yang tidak berhasil (salah). Hal itu dikarenakan pada katup solenoid valve tidak menutup secara tepat sehingga terjadi kebocoran gas. Tapi perintah pada PLC menunjukkan keluaran yang benar. Pengujian selanjutnya benda behasil belok 900 karena katup pada solenoid valve sudah tepat menutup.
Tabel 5. Prosentase Penelitian Prosentase Interpretasi 0 % - 25 % 26 % - 50 % 51 % - 75 % 76 % - 100 %
Sangat sulit diterapkan Sulit diterapkan Mudah diterapkan Sangat mudah diterapkan
Dari hasil pengujian menunjukkan bahwa ketiga pengujian diinterpretasikan dalam kategori Sangat mudah diterapkan sehingga PLC dapat diterapkan pada mesin konveyor yang dibuat sesuai dengan yang diinginkan.
Hasil hubungan antara beban dengan waktu menunjukkan hasil yang sebanding yang artinya semakin berat beban yang digunakan maka akan semakin bertambah pula waktu yang ditempuh. Kecuali pada beban 1 Kg (pertama), dikarenakan pada beban 1 Kg ada faktor-faktor dari luar yang mempengaruhi penambahan waktu yang berakibat pada laju yang kecil. Pada beban kedua (2 Kg) sampai seterusnya waktu yang hasilkan konstan (tetap).
Faktor yang mempengaruhi beban pertama adalah karena bebarapa hal antara lain :
1. Kurangnya gesekan antara bandrefill dengan roll, dikarenakan beban 1 Kg merupakan kotak kosong..
2. Pada beban 1 Kg hampir sama dengan konveyor yang berjalan tanpa beban atau tidak diberi beban sehingga tekanan pada bandrefill kurang.
3. Peletakan awal dari beban walaupun sudah ditandai.
Korelasi yang digunakan pada penelitian ini adalah korelasi product momen yaitu korelasi untuk menentukan dua gejala yang timbul. Dalam penelitian ini dua gejala itu adalah Beban (X) dan Laju (Y).
Rumus Koefisien Korelasi :
rxy =
{
∑
∑
−∑
∑ ∑
}{
∑
−∑
}
− 2 2 2 2 ) ( ) ( X N ) )( ( Y Y N X Y X XY NHasil dari hasil penelitian dimasukkan dalam rumus diatas adalah :
rxy =
{
∑
∑
−∑
∑ ∑
}{
∑
−∑
}
− 2 2 2 2 ) ( ) ( X N ) )( ( Y Y N X Y X XY N rxy ={
2} {
2}
) 901 , 0 ( ) 116 , 0 7 ( ) 28 ( ) 140 7 ( ) 901 , 0 28 ( ) 566 , 3 7 ( − − − x x x x x rxy = 275 , 0 253 , 0 − rxy = - 0,92 rxy2 = 0,85Dari hasil koefisien korelasi ditas menunjukkan bahwa hasilnya – 0,92. Angka – 0,92 artinya bahwa hubungan antara beban dengan laju menunjukkan angka 0,92, sedangkan minus ( - ) hanya menunjukkan tanda bahwa antara beban dengan laju berbanding terbalik. Semakin banyak beban atau bila beban ditambah maka akan semakin turun laju atau jika beban (X) naik maka laju (Y) turun.
Angka rxy2 = 0,85 artinya bahwa 85% laju konveyor dipengaruhi oleh
gesekan antara roll dengan bandrefill dan tekanan antara beban dengan bandrefill itu sendiri. Disamping itu juga faktor peletakan pertama beban pada saat start.
C. Keterbatasan Penelitian
Penelitian tidak lepas dari keterbatasan. Keterbatasan dalam penelitian ini adalah :
1. PLC yang tidak bisa dibongkar.
2. Penentuan waktu tenggang (time delay) antara sensor dengan pneumatik sehingga harus dilakukan percobaan berulang-ulang.
55
BAB V PENUTUP A. Simpulan
Berdasarkan hasil penelitian dari pengujian dan evaluasi data serta pembahasan pada penerapan PLC sebagai sistem kendali pada mesin konveyor maka dapat diambil simpulan sebagai berikut :
1. PLC dapat diterapkan pada mesin konveyor yang telah dibuat sesuai yang diinginkan.
2. Program pada PLC dapat diubah berdasarkan pada alat yang diinginkan. 3. Penerapan PLC pada mesin konveyor dikategorikan ke sangat mudah,
berdasarkan kriteria uji ON sebesar 100 % (sangat mudah), OFF sebesar 100 % (sangat mudah) dan belok 900 sebesar 90% (sangat mudah).
B. Saran
Saran yang dapat diberikan sehubungan dengan penelitian tentang penerapan PLC sebagai sistem kendali pada mesin konveyor ini adalah :
1. Pembuatan software harus dilakukan pengujian berulang-ulang agar hasil yang diperoleh sesuai dengan yang diinginkan.
2. Pada percobaan waktu tenggang (time delay) antara sensor dengan pneumatik perlu dilakukan percobaan berkali-kali agar didapatkan waktu tenggang yang pas.
DAFTAR PUSTAKA
Depdikbud. 1991. Kamus Besar Bahasa Indonesia. Balai Pustaka : Jakarta.
Eko Putra, Agfianto. 2004. PLC Konsep, Pemrograman dan Aplikasi. Gava Media : Yogyakarta.
Factory Automatic Omron. 1997. CPM 1 Training manual. Omron : Jakarta. Factory Automatic Omron. 2000. Sysmac CPM 1A Programmable
Controller-Operation Manual. Omron : Jakarta.
Irianto Tj, Tri. 2005. Modul Pengenalan Dasar PLC (Programmable Logic Controllers) dan Dasar Pemrograman Syswin 3.2
Sugihartono. 1985. Dasar-Dasar Kontrol Pneumatik. Tarsito : Bandung
Suharsimi, Arikunto. 2000. Porsedur Penelitian. PT. Rineka Cipta : Yogyakarta.
Lampiran 2. Kode Mnemonic
SYSTEM PENGENDALIAN CONVEYOR BERBASIS PLC OMRON TYPE CPM-1A DENGAN PEMINDAH BARANG MENGGUNAKAN
PNEUMATIK
Alamat Ladder Code Operand Value 0000 0001 0002 0003 0004 0005 0006 0007 0008 0009 0010 0011 0012 0013 0014 0015 0016 0017 0018 0019 0020 0021 0022 0023 0024 LD OR AND OUT LD TIM LD TIM
AND NOT TIM OUT
LD TIM TIM LD TIM
AND NOT TIM OUT
LD TIM TIM LD OR
AND NOT TIM OUT LD OR AND OUT LD 000.00 015.08 015.05 010.00 015.00 000 000 001 010.01 010.01 001 001 002 010.02 001 002 000.01 015.00 002 015.00 010.01 015.10 015.05 010.03 000.02 0023 0025 0025
0025 0026 0027 0028 0029 0030 0031 0032 0033 0034 0035 0036 0037 0038 0039 0040 0041 0042 0043 0044 0045 0046 0047 0048 0049 0050 0051 0052 0053 0054 0055 OR
AND NOT TIM OUT
LD TIM LD TIM
AND NOT TIM OUT
LD TIM TIM LD TIM
AND NOT TIM OUT LD TIM TIM LD OR AND AND NOT OUT LD OR AND NOT OUT LD OR
AND NOT TIM OUT
LD OR
AND NOT TIM
015.01 005 015.01 015.01 003 003 004 010.04 003 004 004 005 010.05 003 005 010.04 015.11 015.05 000.03 010.06 000.04 015.05 000.05 015.05 010.00 015.08 000 015.08 010.03 015.10 003 0023 0023 0030
0056 0057 0058 0059 0060 0061 OUT LD OR AND NOT OUT END (01) 015.10 010.06 015.11 000.03 015.11
Lampiran 3. Gambar Rangkaian I/O PLC CPM 1A plc Adaptor 24 AC Motor 1 Motor 2 Motor 3 S 1 S 2 S 3 0 12 R 2 R 1 R 3 SE L E N O ID P 1 SE L E N O ID P 2 MAJU MAJU MUNDUR MUNDUR
Rangkaian I/O PLC CPM 1A
Lampiran 4. Gambar Rangkaian Kabel Motor AC
PLC
Adaptor
24 AC Motor 1 Motor 2 Motor 3 0 12 R 2 R 1 R 3 Kabel COOM PLC Output 07 PLC Output 00 PLC Output 03 PLC SAKLAR OO PLCLampiran 5. Gambar Rangkaian Kabel Alur Masukan PLC A D A P T O R 1 2 V O L T TO M B O L S TA R T TO M B O L P A U S E
P L C
C A TU D A Y A + C A TU D A Y A -S A K L A R O N IN P U T 0 1 IN P U T 0 2 IN P U T 0 3Lampiran 6. Gambar Rangkaian Kabel Keluaran Pneumatik PLC SE L E N O ID P 1 SE L E N O ID P 2 GROUND PNEUMATIK 1 MAJU PNEUMATIK 1 MUNDUR PNEUMATIK 2 MAJU PNEUMATIK 2 MUNDUR OUTPUT 01 OUTPUT 02 OUTPUT 04 OUTPUT 05 RANGKAIAN PNEUMATIK
Lampiran 8. Dokumentasi Penelitian
Konstruksi Sistem Konveyor Berbasis PLC
Bagian Pengendali Konveyor Berbasis PLC
Lampiran 9. Hasil Penelitian ON (Motor Berjalan) OFF (Motor Berhenti) Belok 900
Benar Salah Benar Salah Benar Salah Pengujian 1 0 1 0 1 0 1 √ √ √ 2 √ √ √ 3 √ √ √ 4 √ √ √ 5 √ √ √ 6 √ √ √ 7 √ √ √ 8 √ √ √ 9 √ √ √ 10 √ √ √