1
ANALISIS DAN SIMULASI PENGENDALI ROBOT POLAR DERAJAT KEBEBASAN DUA MENGGUNAKAN SLIDING MODE CONTROL
Nama Mahasiswa : Nashrul Millah
NRP : 1208100707
Jurusan : Matematika
Dosen Pembimbing : 1). Subchan. M.Sc. Ph.D.
2). Drs. Kamiran, M.Si.
Abstrak
Bidang industri seringkali menggunakan robot untuk membantu menyelesaikan pekerjaan-pekerjaan yang tidak bisa diakses menggunakan tangan kosong, seperti : pengelasan pada industri mobil dan perakitan elektronik. Untuk dapat menggerak-kan robot secara otomatis melakukan program tertentu, suatu robot memiliki manipulator yang berfungsi sebagai alat gerak robot. Namun demikian, penampilan manipulator robot selalu berkaitan dengan adanya ketidakpastian dan gangguan. Baik berupa gangguan luar dalam bentuk fungsi trigonometri, polinomial dan eksponensial atau gangguan dalam berbentuk perubahan parameter yang diperkecil dan diperbesar. Munculnya hal-hal tersebut menjadi penghambat kinerja manipulator robot.
Pada tugas akhir ini dikaji bentuk pengendali untuk memperkuat kendali terhadap manipulator robot yang terhambat oleh gangguan luar. Robot yang menjadi objek penelitian pada tugas akhir ini adalah robot polar dengan derajat kebebasan dua. Robot polar merupakan jenis robot las yang biasa digunakan dalam industri mobil. Derajat kebebasan dua memiliki arti bahwa robot tersebut dapat bergerak dalam dua cara, yaitu memutar dan memanjang/memendek.
Langkah pertama yang dilakukan adalah menggunakan pengendali SMC untuk menstabilkan gerak robot polar derajat kebebasan dua. Selanjutnya, dipilih kandidat fungsi Lyapunov untuk menganalisa kestabilan sistem berdasarkan teori kestabilan Lyapunov. Hasil dari teori ini digunakan untuk simulasi numerik menggunakan software MATLAB. Simulasi dilakukan dengan mengubah fungsi gangguan luar dan memperbesar serta memperkecil nilai parameter pada robot sebesar 20%. Hasil simulasi menunjukkan setelah sistem diberi pengendali, meskipun terdapat perbedaan grafik yang merupakan respon dari fungsi gangguan dan perubahan parameter, tetapi lintasan yang dihasilkan stabil dan sesuai dengan lintasan yang diharapkan.
Kata kunci: Robot polar dengan derajat kebebasan dua, Sliding Mode Control (SMC), teori stabilitas Lyapunov
1 PENDAHULUAN
Dewasa ini, kemajuan di bidang industri mengalami perkembangan yang cukup signifikan. Hal ini berpengaruh terhadap kebutuhan akan mesin-mesin atau robot yang membantu pekerjaan manusia di bidang industri. Robot yang dapat bergerak sesuai program yang diinginkan sangat membantu meminimalisir pekerjaan manusia, dengan demikian tenaga manusia tidak terforsir untuk melakukan pekerjaan-pekerjaan berat. Robot juga dibutuhkan untuk berinteraksi dengan benda-benda atau material berbahaya tanpa kontak langsung. Bagian tubuh robot yang berfungsi sebagai penggerak robot disebut manipulator.
Manipulator robot (Anonim 1, 2009) merupakan alat yang digunakan untuk menggerakkan suatu benda tanpa kontak langsung. Alat ini mula-mula digunakan untuk berinteraksi dengan bahan radioaktif atau biohazardous (biomedical) pada lengan robot atau tempat-tempat yang tidak bisa disentuh. Sebuah situs tentang robot, ROVer Ranch, menyatakan bahwa pada robot polar, manipulator robot berfungsi untuk memegang atau memindahkan barang, robot ini digunakan dalam proses pengelasan pada industri
mobil dan perakitan elektronik. Pada perkembangan selanjutnya, manipulator sering digunakan pada robot pembantu dalam operasi bedah atau di luar angkasa.
Manipulator robot merupakan contoh dari sistem mekanis yang dapat dikontrol trayektorinya. Meskipun demikian, sistem dinamik non linier tingkat tinggi dari manipulator robot memunculkan tantangan tersendiri dalam masalah kendali. Selalu ada ketidakpastian dan gangguan sehingga mengakibatkan penampilannya tidak sesuai dengan yang diinginkan. Untuk mencapai kestabilan dibutuhkan suatu pengendali yang mampu mengendalikan penampilannya.
Dari tahun ke tahun, seiring dengan semakin berkembangnya keinginan untuk mencapai tingkat akurasi yang lebih tinggi dalam menyelesaikan permasalahan manipulator robot, semakin besar pula ketertarikan dalam menggunakan teknik kendali yang kuat untuk menyelesaikan permasalahan ini. Banyak pendekatan yang dikenalkan dalam berbagai literatur, diantaranya adalah kontrol optimal, Proporsional Integer Differensial (PID), pengendali Sliding Mode Control (SMC) yang digunakan Pratama (2011) untuk mengontrol robot beruda dua dengan pendulum terbalik dan Li dkk (2010) untuk manipulator robot.
2 Pada tugas akhir ini, penulis menggunakan teori SMC untuk mengendalikan robot polar dengan derajat kebebasan dua. Pemilihan teknik kendali SMC dikarenakan kendali ini tahan terhadap gangguan- gangguan baik dari dalam dan luar sistem. Penelitian ini difokuskan pada kontrol posisi pusat lengan dan posisi angular lengan yang timbul akibat pergerakan manipulator yang bergerak memutar dan memanjang atau memendek. Dengan menggunakan beberapa jenis fungsi gangguan, akan disusun pengendali sehingga posisi lengan mengikuti lintasan yang diharapkan.
2 TINJAUAN PUSTAKA
Diberikan model sistem dinamik manipulator robot dengan n penghubung yang dinyatakan dalam persamaan differensial vektor non linier orde dua sebagai berikut (Faieghi dkk, 2011):
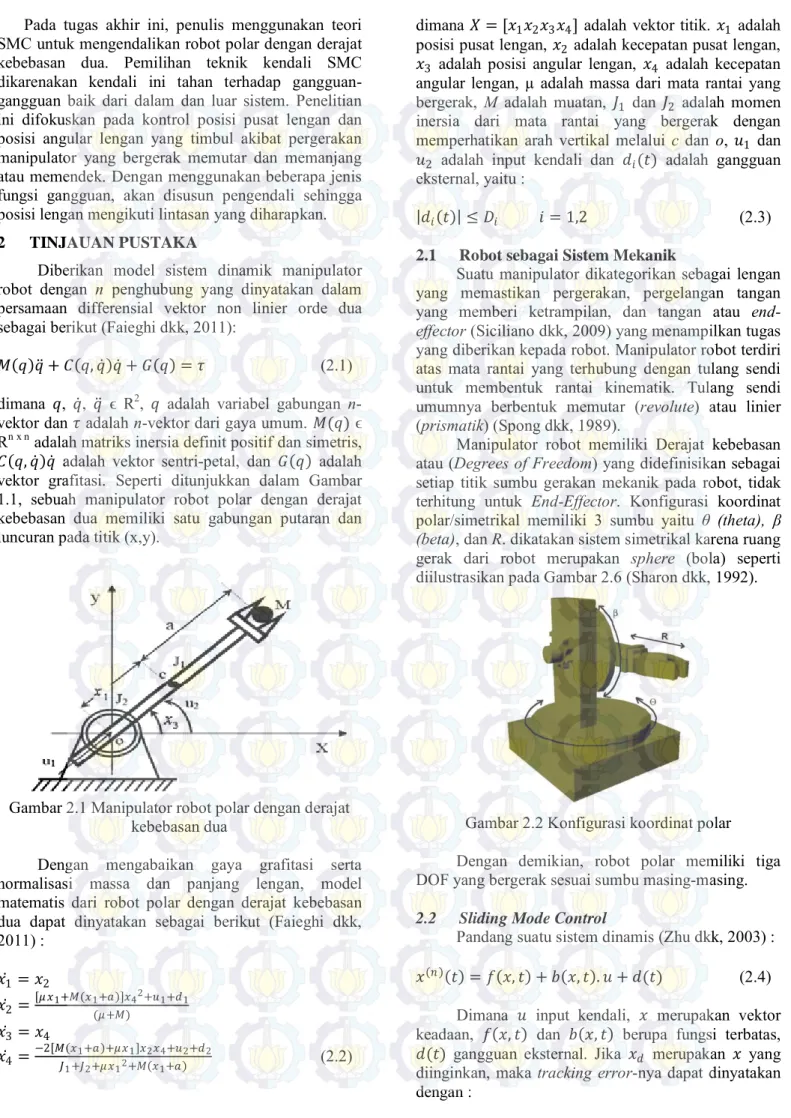
𝑀𝑀(𝑞𝑞)𝑞𝑞̈ + 𝐶𝐶(𝑞𝑞, 𝑞𝑞̇)𝑞𝑞̇ + 𝐺𝐺(𝑞𝑞) = 𝜏𝜏 (2.1) dimana 𝑞𝑞, 𝑞𝑞̇, 𝑞𝑞̈ ϵ R2, 𝑞𝑞 adalah variabel gabungan n- vektor dan 𝜏𝜏 adalah n-vektor dari gaya umum. 𝑀𝑀(𝑞𝑞) ϵ Rn x n adalah matriks inersia definit positif dan simetris, 𝐶𝐶(𝑞𝑞, 𝑞𝑞̇)𝑞𝑞̇ adalah vektor sentri-petal, dan 𝐺𝐺(𝑞𝑞) adalah vektor grafitasi. Seperti ditunjukkan dalam Gambar 1.1, sebuah manipulator robot polar dengan derajat kebebasan dua memiliki satu gabungan putaran dan luncuran pada titik (x,y).
Gambar 2.1 Manipulator robot polar dengan derajat kebebasan dua
Dengan mengabaikan gaya grafitasi serta normalisasi massa dan panjang lengan, model matematis dari robot polar dengan derajat kebebasan dua dapat dinyatakan sebagai berikut (Faieghi dkk, 2011) :
𝑥𝑥1̇ = 𝑥𝑥2
𝑥𝑥2̇ =[𝜇𝜇𝑥𝑥1+𝑀𝑀(𝑥𝑥1(𝜇𝜇+𝑀𝑀)+𝑎𝑎)]𝑥𝑥42+𝑢𝑢1+𝑑𝑑1 𝑥𝑥3̇ = 𝑥𝑥4
𝑥𝑥4̇ =−2[𝑀𝑀(𝑥𝑥𝐽𝐽 1+𝑎𝑎)+𝜇𝜇𝑥𝑥1]𝑥𝑥2𝑥𝑥4+𝑢𝑢2+𝑑𝑑2
1+𝐽𝐽2+𝜇𝜇𝑥𝑥12+𝑀𝑀(𝑥𝑥1+𝑎𝑎) (2.2)
dimana 𝑋𝑋 = [𝑥𝑥1𝑥𝑥2𝑥𝑥3𝑥𝑥4] adalah vektor titik. 𝑥𝑥1 adalah posisi pusat lengan, 𝑥𝑥2 adalah kecepatan pusat lengan, 𝑥𝑥3 adalah posisi angular lengan, 𝑥𝑥4 adalah kecepatan angular lengan, µ adalah massa dari mata rantai yang bergerak, M adalah muatan, 𝐽𝐽1 dan 𝐽𝐽2 adalah momen inersia dari mata rantai yang bergerak dengan memperhatikan arah vertikal melalui c dan o, 𝑢𝑢1 dan 𝑢𝑢2 adalah input kendali dan 𝑑𝑑𝑖𝑖(𝑡𝑡) adalah gangguan eksternal, yaitu :
|𝑑𝑑𝑖𝑖(𝑡𝑡)| ≤ 𝐷𝐷𝑖𝑖 𝑖𝑖 = 1,2 (2.3) 2.1 Robot sebagai Sistem Mekanik
Suatu manipulator dikategorikan sebagai lengan yang memastikan pergerakan, pergelangan tangan yang memberi ketrampilan, dan tangan atau end- effector (Siciliano dkk, 2009) yang menampilkan tugas yang diberikan kepada robot. Manipulator robot terdiri atas mata rantai yang terhubung dengan tulang sendi untuk membentuk rantai kinematik. Tulang sendi umumnya berbentuk memutar (revolute) atau linier (prismatik) (Spong dkk, 1989).
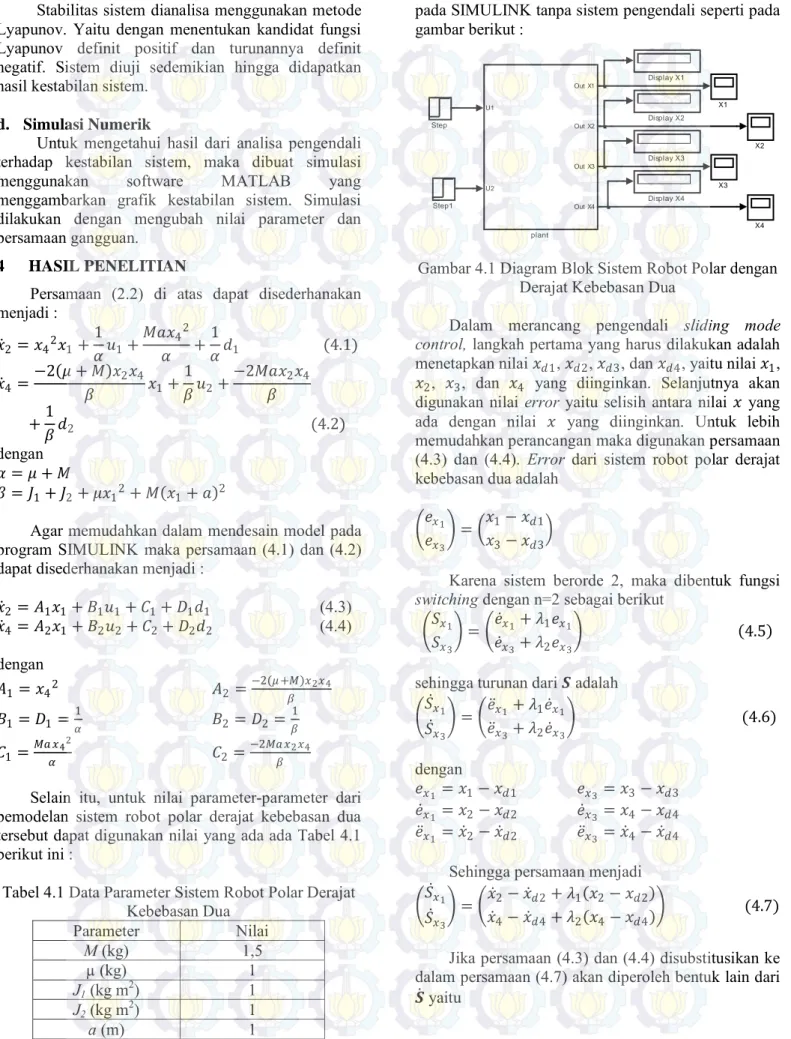
Manipulator robot memiliki Derajat kebebasan atau (Degrees of Freedom) yang didefinisikan sebagai setiap titik sumbu gerakan mekanik pada robot, tidak terhitung untuk End-Effector. Konfigurasi koordinat polar/simetrikal memiliki 3 sumbu yaitu θ (theta), β (beta), dan R. dikatakan sistem simetrikal karena ruang gerak dari robot merupakan sphere (bola) seperti diilustrasikan pada Gambar 2.6 (Sharon dkk, 1992).
Gambar 2.2 Konfigurasi koordinat polar Dengan demikian, robot polar memiliki tiga DOF yang bergerak sesuai sumbu masing-masing.
2.2 Sliding Mode Control
Pandang suatu sistem dinamis (Zhu dkk, 2003) : 𝑥𝑥(𝑛𝑛)(𝑡𝑡) = 𝑓𝑓(𝑥𝑥, 𝑡𝑡) + 𝑏𝑏(𝑥𝑥, 𝑡𝑡). 𝑢𝑢 + 𝑑𝑑(𝑡𝑡) (2.4)
Dimana 𝑢𝑢 input kendali, 𝑥𝑥 merupakan vektor keadaan, 𝑓𝑓(𝑥𝑥, 𝑡𝑡) dan 𝑏𝑏(𝑥𝑥, 𝑡𝑡) berupa fungsi terbatas, 𝑑𝑑(𝑡𝑡) gangguan eksternal. Jika 𝑥𝑥𝑑𝑑 merupakan 𝑥𝑥 yang diinginkan, maka tracking error-nya dapat dinyatakan dengan :
3 𝑒𝑒(𝑡𝑡) = 𝑥𝑥(𝑡𝑡) − 𝑥𝑥𝑑𝑑(𝑡𝑡) (2.5)
Fungsi switching yaitu permukaan 𝑆𝑆(𝑥𝑥, 𝑡𝑡) di dalam ruang keadaan 𝑅𝑅𝑛𝑛, memenuhi persamaan (Herlambang, 2010) :
𝑆𝑆(𝑥𝑥, 𝑡𝑡) = �𝑑𝑑𝑡𝑡𝑑𝑑 + 𝜆𝜆�𝑛𝑛−1𝑒𝑒 (2.6) Untuk static sliding mode control menggunakan 𝑆𝑆(𝑥𝑥, 𝑡𝑡) = �𝑑𝑑𝑡𝑡𝑑𝑑 + 𝜆𝜆�𝑛𝑛−1𝑒𝑒 sedangkan untuk dynamic sliding mode control menggunakan 𝑆𝑆(𝑥𝑥, 𝑡𝑡) =
�𝑑𝑑𝑡𝑡𝑑𝑑 + 𝜆𝜆�(𝑛𝑛+1)−1𝑒𝑒
Dengan λ berupa konstanta positif dan 𝑛𝑛 adalah orde sistem. Dimana fungsi switching ini digunakan untuk menentukan besarnya nilai u agar memenuhi kondisi sliding.
Permukaan sliding (sliding surface) merupakan persamaan yang memenuhi :
𝑆𝑆(𝑥𝑥, 𝑡𝑡) = 0 (2.7)
Besar nilai input kendali pada SMC bergantung pada nilai S, sehingga memenuhi pertidaksamaan yang disebut kondisi sliding. Kondisi tersebut ditulis dalam bentuk sebagai berikut :
𝑉𝑉̇ = 𝑆𝑆𝑆𝑆̇ ≤ −𝜂𝜂|𝑆𝑆| (2.8)
Untuk suatu 𝜂𝜂 konstanta positif. Sliding mode berarti bahwa sekali trayektori keadaan e mencapai permukaan sliding, maka trayektori sistem akan bertahan di sana sambil meluncur ke titik asal bidang 𝑒𝑒𝑒𝑒̇ secara independen dengan semua ketidakpastian.
2.3 Teori Kestabilan Lyapunov
Anggap sebuah sistem autonomous nonlinier (Ross, 1984)
) , (
) , (
y x dt Q
dy
y x dt P
dx
=
=
(2.9)
Definisi (Ross, 1984) :
Misalkan E(x,y) memiliki turunan pertama parsial yang kontinu pada semua titik (x,y) di domain D yang memuat titik (0,0).
1. Fungsi E dikatakan definit positif di D jika E(0,0)=0 dan E(x,y)>0 untuk setiap titik-titik (x,y) yang lain di D.
2. Fungsi E dikatakan definit negatif di D jika E(0,0)=0 dan E(x,y)<0 untuk setiap titik-titik (x,y) yang lain di D.
3. Fungsi E dikatakan semidefinit positif di D jika E(0,0)=0 dan E(x,y)≥0 untuk setiap titik- titik (x,y) yang lain di D.
4. Fungsi E dikatakan semidefinit negatif di D jika E(0,0)=0 dan E(x,y)≤0 untuk setiap titik- titik (x,y) yang lain di D.
Definisi (Ross, 1984) :
Misalkan E(x,y) memiliki turunan pertama parsial yang kontinu pada semua titik (x,y) di domain D yang memuat titik (0,0). Turunan E mengacu pada persamaan (2.9) adalah E\•. didefinisikan sebagai
( ) ( ) ( ) ( ) ( )
Q x y yy x y E
x x P
y x y E
x
E , , , , ,
∂ +∂
∂
= ∂
• (2.10)
Definisi (Ross, 1984) :
Asumsikan bahwa sistem (2.9) memiliki sebuah titik kritis terisolasi di (0,0) dan bahwa P dan Q memiliki turunan parsial pertama yang kontinu untuk setiap (x,y). Misalkan E(x,y) definit positif untuk setiap (x,y) di domain D yang memuat titik (0,0) sehingga turunan dari E semidefinit negatif untuk setiap (x,y)∈ D. Maka E dikatakan fungsi Lyapunov untuk sistem (2.9) di D.
Teorema 2.3.1 (Ross, 1984)
Asumsikan bahwa sistem (2.9) memiliki sebuah titik kritis terisolasi di (0,0) dan bahwa P dan Q memiliki turunan parsial pertama yang kontinu untuk setiap (x,y). Jika terdapat fungsi Lyapunov E untuk sistem (2.9) di suatu domain D yang memuat (0,0), maka titik kritis (0,0) stabil.
Teorema 2.3.2 (Ross, 1984)
Asumsikan bahwa sistem (2.9) memiliki sebuah titik kritis terisolasi di (0,0) dan bahwa P dan Q memiliki turunan parsial pertama yang kontinu untuk setiap (x,y). Jika terdapat fungsi Lyapunov E untuk sistem (2.9) di suatu domain D yang memuat (0,0) sehingga E juga memenuhi syarat bahwa E\•. yang didefinisikan oleh (2.10) definit negatif di D, maka titik kritis (0,0) dari (2.9) stabil asimtotis.
3 METODE PENELITIAN
Dalam penulisan makalah ini, penulis mengikuti langkah-langkah sebagai berikut :
a. Studi Literatur
Studi Literatur dilakukan untuk mendapatkan informasi mengenai model sistem dinamik manipulator robot polar dengan derajat kebebasan dua serta teori tentang Sliding Mode Control dan Lyapunov.
b. Analisa pengendali sliding mode
Analisa pengendali menggunakan metode sliding mode control untuk membawa nilai error menuju nol, sehingga menjadikan sistem stabil. Dalam hal ini dicari nilai u yang memenuhi kondisi sliding.
4 c. Analisa stabilitas
Stabilitas sistem dianalisa menggunakan metode Lyapunov. Yaitu dengan menentukan kandidat fungsi Lyapunov definit positif dan turunannya definit negatif. Sistem diuji sedemikian hingga didapatkan hasil kestabilan sistem.
d. Simulasi Numerik
Untuk mengetahui hasil dari analisa pengendali terhadap kestabilan sistem, maka dibuat simulasi menggunakan software MATLAB yang menggambarkan grafik kestabilan sistem. Simulasi dilakukan dengan mengubah nilai parameter dan persamaan gangguan.
4 HASIL PENELITIAN
Persamaan (2.2) di atas dapat disederhanakan menjadi :
𝑥𝑥̇2 = 𝑥𝑥42𝑥𝑥1+1
𝛼𝛼 𝑢𝑢1+𝑀𝑀𝑎𝑎𝑥𝑥42 𝛼𝛼 +1
𝛼𝛼 𝑑𝑑1 (4.1) 𝑥𝑥̇4 =−2(𝜇𝜇 + 𝑀𝑀)𝑥𝑥2𝑥𝑥4
𝛽𝛽 𝑥𝑥1+1
𝛽𝛽 𝑢𝑢2+−2𝑀𝑀𝑎𝑎𝑥𝑥2𝑥𝑥4 𝛽𝛽 +1
𝛽𝛽 𝑑𝑑2 (4.2) dengan
𝛼𝛼 = 𝜇𝜇 + 𝑀𝑀
𝛽𝛽 = 𝐽𝐽1+ 𝐽𝐽2+ 𝜇𝜇𝑥𝑥12+ 𝑀𝑀(𝑥𝑥1+ 𝑎𝑎)2
Agar memudahkan dalam mendesain model pada program SIMULINK maka persamaan (4.1) dan (4.2) dapat disederhanakan menjadi :
𝑥𝑥̇2 = 𝐴𝐴1𝑥𝑥1+ 𝐵𝐵1𝑢𝑢1+ 𝐶𝐶1+ 𝐷𝐷1𝑑𝑑1 (4.3) 𝑥𝑥̇4 = 𝐴𝐴2𝑥𝑥1+ 𝐵𝐵2𝑢𝑢2+ 𝐶𝐶2+ 𝐷𝐷2𝑑𝑑2 (4.4) dengan
𝐴𝐴1= 𝑥𝑥42 𝐴𝐴2=−2(𝜇𝜇+𝑀𝑀)𝑥𝑥2𝑥𝑥4
𝛽𝛽
𝐵𝐵1= 𝐷𝐷1=𝛼𝛼1 𝐵𝐵2= 𝐷𝐷2=𝛽𝛽1 𝐶𝐶1=𝑀𝑀𝑎𝑎 𝑥𝑥𝛼𝛼42 𝐶𝐶2=−2𝑀𝑀𝑎𝑎𝑥𝑥𝛽𝛽 2𝑥𝑥4
Selain itu, untuk nilai parameter-parameter dari pemodelan sistem robot polar derajat kebebasan dua tersebut dapat digunakan nilai yang ada ada Tabel 4.1 berikut ini :
Tabel 4.1 Data Parameter Sistem Robot Polar Derajat Kebebasan Dua
Parameter Nilai
M (kg) 1,5
µ (kg) 1
J1 (kg m2) 1 J2 (kg m2) 1
a (m) 1
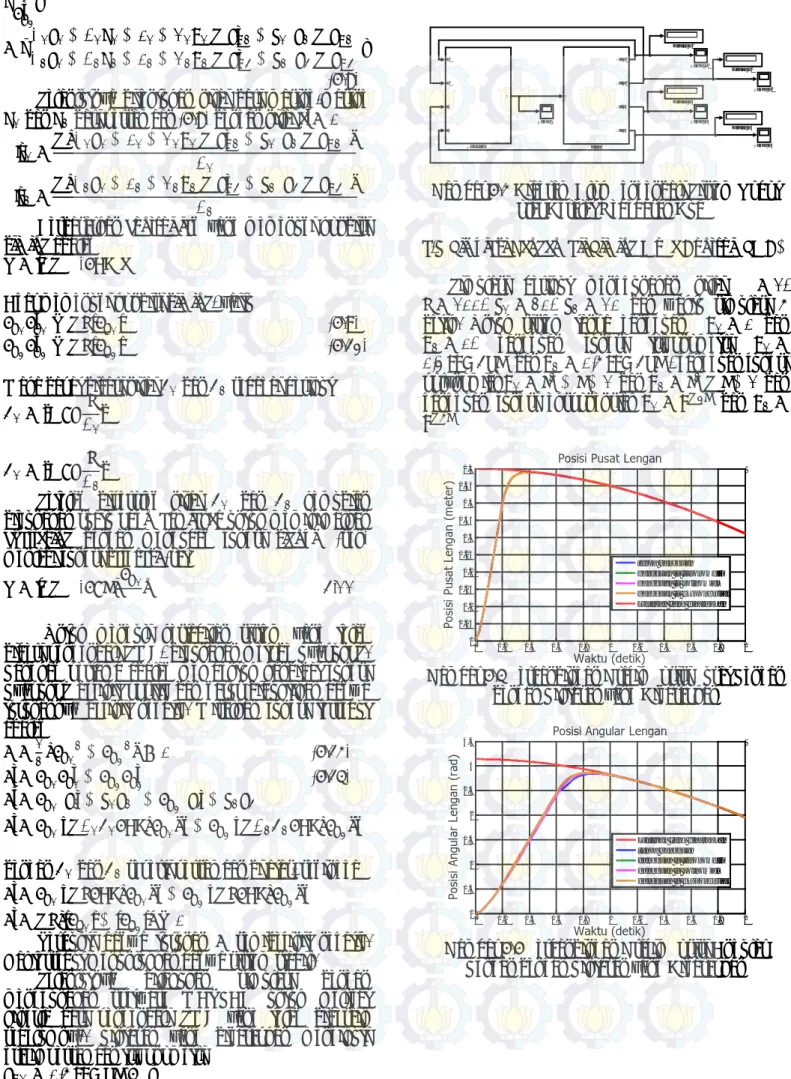
Selanjutnya dari model matematika pada persamaan (4.1) dan (4.2) akan diimplementasikan pada SIMULINK tanpa sistem pengendali seperti pada gambar berikut :
Gambar 4.1 Diagram Blok Sistem Robot Polar dengan Derajat Kebebasan Dua
Dalam merancang pengendali sliding mode control, langkah pertama yang harus dilakukan adalah menetapkan nilai 𝑥𝑥𝑑𝑑1, 𝑥𝑥𝑑𝑑2, 𝑥𝑥𝑑𝑑3, dan 𝑥𝑥𝑑𝑑4, yaitu nilai 𝑥𝑥1, 𝑥𝑥2, 𝑥𝑥3, dan 𝑥𝑥4 yang diinginkan. Selanjutnya akan digunakan nilai error yaitu selisih antara nilai 𝑥𝑥 yang ada dengan nilai 𝑥𝑥 yang diinginkan. Untuk lebih memudahkan perancangan maka digunakan persamaan (4.3) dan (4.4). Error dari sistem robot polar derajat kebebasan dua adalah
�𝑒𝑒𝑥𝑥1
𝑒𝑒𝑥𝑥3
� = �𝑥𝑥1− 𝑥𝑥𝑑𝑑1
𝑥𝑥3− 𝑥𝑥𝑑𝑑3�
Karena sistem berorde 2, maka dibentuk fungsi switching dengan n=2 sebagai berikut
�𝑆𝑆𝑥𝑥1
𝑆𝑆𝑥𝑥3
� = �𝑒𝑒̇𝑥𝑥1+ 𝜆𝜆1𝑒𝑒𝑥𝑥1
𝑒𝑒̇𝑥𝑥3 + 𝜆𝜆2𝑒𝑒𝑥𝑥3
� (4.5)
sehingga turunan dari 𝑺𝑺 adalah
�𝑆𝑆̇𝑥𝑥1
𝑆𝑆̇𝑥𝑥3� = �𝑒𝑒̈𝑥𝑥1 + 𝜆𝜆1𝑒𝑒̇𝑥𝑥1
𝑒𝑒̈𝑥𝑥3 + 𝜆𝜆2𝑒𝑒̇𝑥𝑥3� (4.6) dengan
𝑒𝑒𝑥𝑥1 = 𝑥𝑥1− 𝑥𝑥𝑑𝑑1 𝑒𝑒𝑥𝑥3 = 𝑥𝑥3− 𝑥𝑥𝑑𝑑3
𝑒𝑒̇𝑥𝑥1 = 𝑥𝑥2− 𝑥𝑥𝑑𝑑2 𝑒𝑒̇𝑥𝑥3 = 𝑥𝑥4− 𝑥𝑥𝑑𝑑4 𝑒𝑒̈𝑥𝑥1 = 𝑥𝑥̇2− 𝑥𝑥̇𝑑𝑑2 𝑒𝑒̈𝑥𝑥3 = 𝑥𝑥̇4− 𝑥𝑥̇𝑑𝑑4
Sehingga persamaan menjadi
�𝑆𝑆̇𝑥𝑥1
𝑆𝑆̇𝑥𝑥3� = �𝑥𝑥̇2− 𝑥𝑥̇𝑑𝑑2+ 𝜆𝜆1(𝑥𝑥2− 𝑥𝑥𝑑𝑑2)
𝑥𝑥̇4− 𝑥𝑥̇𝑑𝑑4+ 𝜆𝜆2(𝑥𝑥4− 𝑥𝑥𝑑𝑑4)� (4.7) Jika persamaan (4.3) dan (4.4) disubstitusikan ke dalam persamaan (4.7) akan diperoleh bentuk lain dari 𝑺𝑺̇ yaitu
U1
U2
Out X1
Out X2
Out X3
Out X4
plant
X4 X3
X2 X1
Step1 Step
Display X4 Display X3 Display X2 Display X1
5
�𝑆𝑆̇𝑥𝑥1 𝑆𝑆̇𝑥𝑥3�
= �𝐴𝐴1𝑥𝑥1+ 𝐵𝐵1𝑢𝑢1+ 𝐶𝐶1+ 𝐷𝐷1𝑑𝑑1− 𝑥𝑥̇𝑑𝑑2+ 𝜆𝜆1(𝑥𝑥2− 𝑥𝑥𝑑𝑑2) 𝐴𝐴2𝑥𝑥1+ 𝐵𝐵2𝑢𝑢2+ 𝐶𝐶2+ 𝐷𝐷2𝑑𝑑2− 𝑥𝑥̇𝑑𝑑4+ 𝜆𝜆2(𝑥𝑥4− 𝑥𝑥𝑑𝑑4)�
(4.8) Selanjutnya ditentukan nilai dari masing-masing 𝑢𝑢1 dan 𝑢𝑢2 dari persamaan (4.8) dengan nilai 𝑺𝑺̇ = 0
𝑢𝑢�1=−�𝐴𝐴1𝑥𝑥1+ 𝐶𝐶1+ 𝐷𝐷1𝑑𝑑1− 𝑥𝑥̇𝑑𝑑2+ 𝜆𝜆1(𝑥𝑥2− 𝑥𝑥𝑑𝑑2)�
𝐵𝐵1
𝑢𝑢�2 =−�𝐴𝐴2𝑥𝑥1+ 𝐶𝐶2+ 𝐷𝐷2𝑑𝑑2− 𝑥𝑥̇𝑑𝑑4 + 𝜆𝜆2(𝑥𝑥4− 𝑥𝑥𝑑𝑑4)�
𝐵𝐵2
Berdasarkan control law yang memenuhi kondisi sliding adalah
𝒖𝒖 = 𝒖𝒖� − 𝑲𝑲. 𝑆𝑆𝑆𝑆𝑛𝑛(𝑺𝑺)
Agar memenuhi kondisi sliding, yaitu
𝑆𝑆𝑥𝑥1𝑆𝑆̇𝑥𝑥1 ≤ −𝜂𝜂�𝑆𝑆𝑥𝑥1� (4.9) 𝑆𝑆𝑥𝑥3𝑆𝑆̇𝑥𝑥3 ≤ −𝜂𝜂�𝑆𝑆𝑥𝑥3� (4.10) Maka dapat dicari nilai 𝐾𝐾1 dan 𝐾𝐾2 sebagai berikut 𝐾𝐾1= �𝑚𝑚𝑎𝑎𝑥𝑥 𝜂𝜂
𝐵𝐵1� 𝐾𝐾1= �𝑚𝑚𝑎𝑎𝑥𝑥 𝜂𝜂
𝐵𝐵2�
Setelah diperoleh nilai 𝐾𝐾1 dan 𝐾𝐾2 kemudian digunakan suatu boundary layer untuk meminimalkan chattering dengan mengubah fungsi signum (sgn) menjadi fungsi saturasi (sat)
𝒖𝒖 = 𝒖𝒖� − 𝑲𝑲. 𝑆𝑆𝑎𝑎𝑡𝑡 �𝑆𝑆𝑥𝑥1
Φ � (4.11) Untuk menguji kestabilan sistem yang telah diberi pengendali SMC, digunakan metode Lyapunov.
Langkah pertama adalah membentuk kandidat fungsi Lyapunov definit positif dan harus dibuktikan bahwa turunannya definit negatif. Misalkan fungsi tersebut adalah
𝑉𝑉 =12�𝑆𝑆𝑥𝑥12+ 𝑆𝑆𝑥𝑥32� > 0 (4.12) 𝑉𝑉̇ = 𝑆𝑆𝑥𝑥1𝑆𝑆𝑥𝑥̇ + 𝑆𝑆1 𝑥𝑥3𝑆𝑆𝑥𝑥̇ 3 (4.13) 𝑉𝑉̇ = 𝑆𝑆𝑥𝑥1(𝑥𝑥2̇ + 𝜆𝜆1𝑥𝑥2) + 𝑆𝑆𝑥𝑥3(𝑥𝑥4̇ + 𝜆𝜆2𝑥𝑥4)
𝑉𝑉̇ = 𝑆𝑆𝑥𝑥1�−𝐵𝐵1𝐾𝐾1𝑆𝑆𝑆𝑆𝑛𝑛�𝑆𝑆𝑥𝑥1�� + 𝑆𝑆𝑥𝑥3�−𝐵𝐵2𝐾𝐾2𝑆𝑆𝑆𝑆𝑛𝑛�𝑆𝑆𝑥𝑥3��
dengan 𝐾𝐾1 dan 𝐾𝐾2 seperti persamaan di atas, sehingga 𝑉𝑉̇ = 𝑆𝑆𝑥𝑥1�−𝜂𝜂𝑆𝑆𝑆𝑆𝑛𝑛�𝑆𝑆𝑥𝑥1�� + 𝑆𝑆𝑥𝑥3�−𝜂𝜂𝑆𝑆𝑆𝑆𝑛𝑛�𝑆𝑆𝑥𝑥3��
𝑉𝑉̇ = −𝜂𝜂��𝑆𝑆𝑥𝑥1� + �𝑆𝑆𝑥𝑥3�� ≤ 0
Terbukti bahwa turunan 𝑉𝑉 semidefinit negatif.
Hal tersebut menunjukkan bahwa sistem stabil.
Selanjutnya dilakukan simulasi dengan menggunakan software MATLAB untuk melihat kinerja dari pengendali SMC yang telah didesain sebelumnya. Lintasan yang diharapkan mengikuti grafik persamaan trigonometri
𝑥𝑥𝑑𝑑1 = 0,5 cos(𝜋𝜋𝑡𝑡/7) m
𝑥𝑥𝑑𝑑3 = 𝜋𝜋 cos(𝜋𝜋𝑡𝑡/7) rad (4.12)
Gambar 4.2 Diagram Blok Pengendali Sistem Robot Polar Derajat Kebebasan Dua
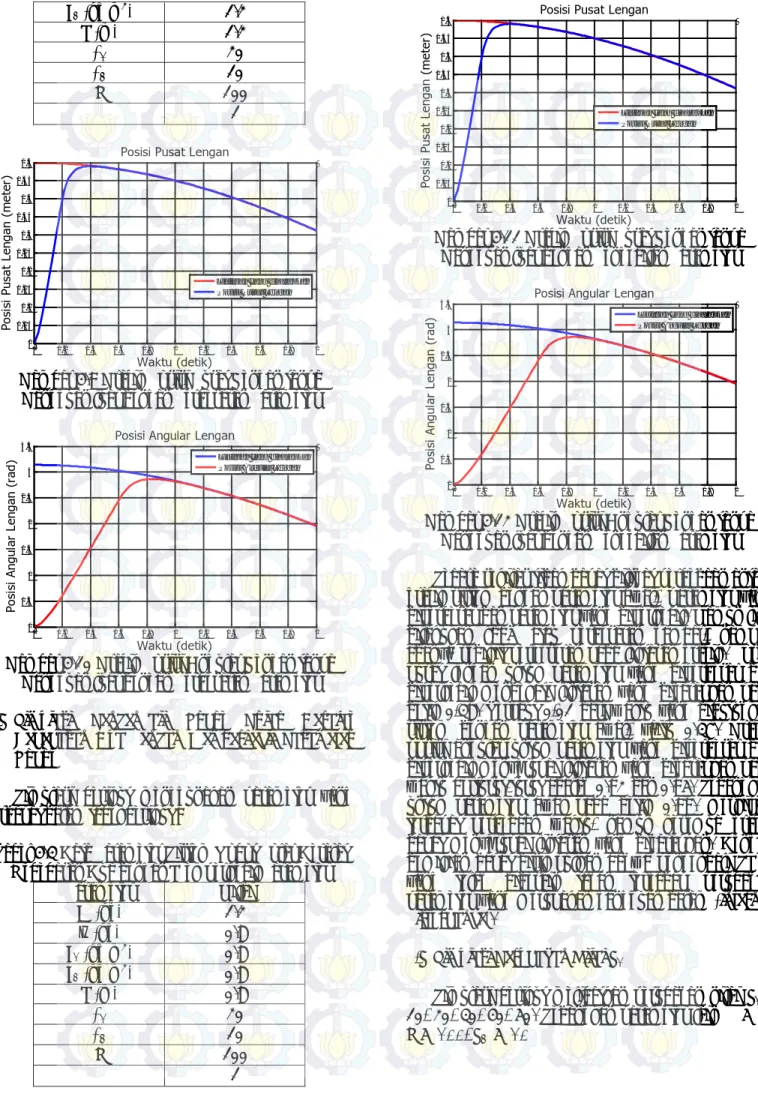
a. Simulasi Pengendali Sliding Mode Control (SMC) Simulasi berikut menggunakan nilai Φ = 1, 𝜂𝜂 = 100, 𝜆𝜆1= 20, 𝜆𝜆2 = 10 dan waktu simulasi 2 detik. Untuk sistem tanpa gangguan 𝑑𝑑1= 0 dan 𝑑𝑑2= 0, gangguan fungsi trigonometri 𝑑𝑑1= 0,3 cos(4𝜋𝜋𝑡𝑡) dan 𝑑𝑑2= 0,5 cos(4𝜋𝜋𝑡𝑡), gangguan fungsi polynomial 𝑑𝑑1= 𝑡𝑡2+ 𝑡𝑡 + 1 dan 𝑑𝑑2= 𝑡𝑡2− 𝑡𝑡 + 1 dan gangguan fungsi eksponensial 𝑑𝑑1= 𝑒𝑒−3𝑡𝑡 dan 𝑑𝑑2= 𝑒𝑒−5𝑡𝑡
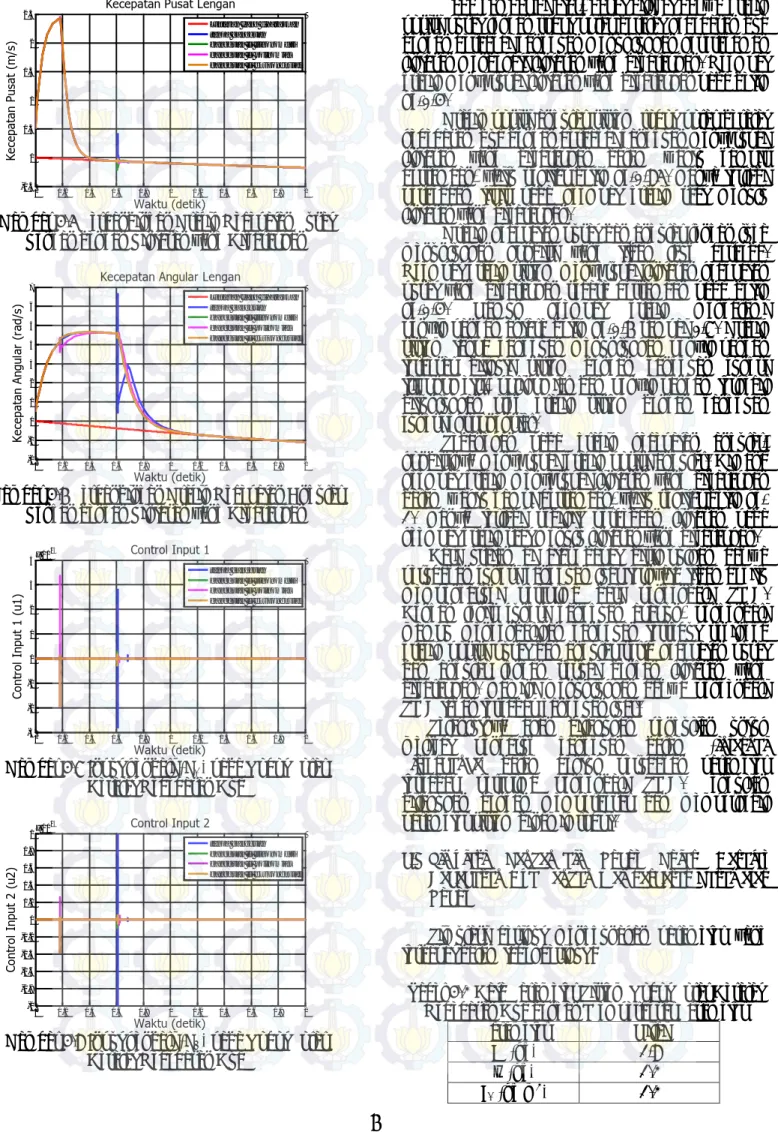
Gambar 4.3 Perbandingan Grafik Posisi Pusat Lengan dengan Lintasan yang Diharapkan
Gambar 4.4 Perbandingan Grafik Posisi Angular Lengan dengan Lintasan yang Diharapkan
U
Out X1
Out X2
Out X3
Out X4
plant X1
X2
X3
X4
U
Subsystem Scope X4
Scope X3
Scope X2 Scope X1
Scope U
Display X4 Display X3
Display X2 Display X1
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Posisi Pusat Lengan
Waktu (detik)
Posisi Pusat Lengan (meter)
tanpa gangguan gangguan fs trigonometri gangguan fs polinomial gangguan fs eksponensial Lintasan yang diharapkan
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0 0.5 1 1.5 2 2.5 3 3.5
Posisi Angular Lengan
Waktu (detik)
Posisi Angular Lengan (rad)
Lintasan yang diharapkan tanpa gangguan gangguan fs trigonometri gangguan fs polinomial gangguan fs eksponensial
6 Gambar 4.5 Perbandingan Grafik Kecepatan Pusat
Lengan dengan Lintasan yang Diharapkan
Gambar 4.6 Perbandingan Grafik Kecepatan Angular Lengan dengan Lintasan yang Diharapkan
Gambar 4.7 Input kendali (𝑢𝑢1) pada Robot Polar Derajat Kebebasan Dua
Gambar 4.8 Input kendali (𝑢𝑢2) pada Robot Polar Derajat Kebebasan Dua
Pada gambar di atas, dapat dilihat bahwa grafik posisi pusat lengan robot polar derajat kebebasan dua dengan berbagai gangguan menunjukkan keseragaman lintasan mendekati lintasan yang diharapkan. Keempat grafik menyerupai lintasan yang diharapkan pada detik ke-0,4.
Grafik posisi angular sistem robot polar derajat kebebasan dua dengan berbagai gangguan menyerupai lintasan yang diharapkan dalam waktu hampir bersamaan, yaitu sekitar detik ke-0,85. Hanya terjadi perbedaan tipis pada keempat grafik saat menuju lintasan yang diharapkan.
Grafik kecepatan pusat dan angular lengan juga menunjukkan kondisi yang tidak jauh berbeda.
Keempat grafik sistem menyerupai lintasan kecepatan pusat yang diharapkan secara bersamaan pada detik ke-0,4. Namun keempat grafik mengalami penyimpangan antara detik ke-0,6 sampai 0,7. Grafik sistem tanpa gangguan menunjukkan penyimpangan terbesar diikuti sistem dengan gangguan fungsi trigonometri, polinomial dan penyimpangan terkecil ditunjukkan oleh grafik sistem dengan gangguan fungsi eksponensial.
Sedangkan pada grafik kecepatan angular, kondisinya menyerupai grafik posisi angular. Dimana keempat grafik menyerupai lintasan yang diharapkan dalam waktu hampi bersamaan, yaitu sekitar detik ke- 1. Hanya terjadi sedikit perbedaan lintasan pada keempat grafik saat menuju lintasan yang diharapkan.
Dari uraian di atas dapat disimpulkan bahwa perubahan fungsi gangguan luar ternyata tidak begitu mempengaruhi performa dari pengendali SMC.
Dengan jenis fungsi gangguan apapun, pengendali mampu mengendalikan gangguan tersebut sehingga grafik posisi pusat dan angular serta kecepatan pusat dan angular lengan sesuai dengan lintasan yang diharapkan. Hal ini menunjukkan bahwa pengendali SMC tahan terhadap gangguan luar.
Selanjutnya akan dilakukan pengujian untuk melihat pengaruh gangguan dalam (internal disturbance) dalam bentuk perubahan parameter terhadap performa pengendali SMC. Pengujian dilakukan dengan memperbesar dan memperkecil parameter sistem dinamik robot.
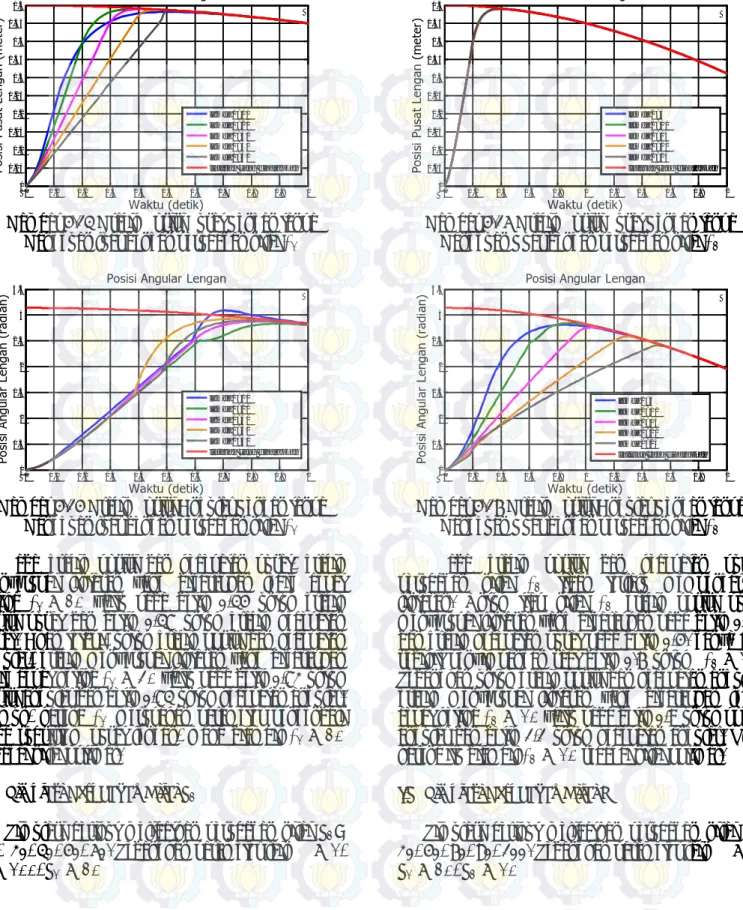
b. Simulasi Pengendali Robot Polar Derajat Kebebasan Dua dengan Memperbesar Parameter Robot
Simulasi berikut menggunakan parameter yang terdapat dalam tabel berikut :
Tabel 4.2 Data Parameter Sistem Robot Polar Derajat Kebebasan Dua dengan Memperbesar Parameter
Parameter Nilai
M (kg) 1,8
µ (kg) 1.2
J1 (kg m2) 1.2
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-0.5 0 0.5 1 1.5 2 2.5
Kecepatan Pusat Lengan
Waktu (detik)
Kecepatan Pusat (m/s)
Lintasan yang diharapkan tanpa gangguan gangguan fs trigonometri gangguan fs polinomial gangguan fs eksponensial
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-2 -1 0 1 2 3 4 5 6
7 Kecepatan Angular Lengan
Waktu (detik)
Kecepatan Angular (rad/s) Lintasan yang diharapkan tanpa gangguan gangguan fs trigonometri gangguan fs polinomial gangguan fs eksponensial
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-3 -2 -1 0 1 2 3
4x 1013 Control Input 1
Waktu (detik)
Control Input 1 (u1)
tanpa gangguan gangguan fs trigonometri gangguan fs polinomial gangguan fs eksponensial
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
1x 1015 Control Input 2
Waktu (detik)
Control Input 2 (u2)
tanpa gangguan gangguan fs trigonometri gangguan fs polinomial gangguan fs eksponensial
7 J2 (kg m2) 1.2
a (m) 1.2
λ1 20
λ2 10
𝜂𝜂 100
Φ 1
Gambar 4.9 Grafik Posisi Pusat Lengan tanpa Gangguan luar dengan Perbesaran Parameter
Gambar 4.10 Grafik Posisi Angular Lengan tanpa Gangguan luar dengan Perbesaran Parameter c. Simulasi Pengendali Robot Polar Derajat
Kebebasan Dua dengan Memperkecil Parameter Robot
Simulasi berikut menggunakan parameter yang terdapat dalam tabel berikut :
Tabel 4.3 Data Parameter Sistem Robot Polar Derajat Kebebasan Dua dengan Memperkecil Parameter
Parameter Nilai
M (kg) 1.2
µ (kg) 0.8
J1 (kg m2) 0.8 J2 (kg m2) 0.8
a (m) 0.8
λ1 20
λ2 10
𝜂𝜂 100
Φ 1
Gambar 4.11 Grafik Posisi Pusat Lengan tanpa Gangguan luar dengan Pengecilan Parameter
Gambar 4.12 Grafik Posisi Angular Lengan tanpa Gangguan luar dengan Pengecilan Parameter Secara sekilas tidak dapat dilihat perbedaan antara grafik sistem dengan parameter awal, parameter yang diperbesar dan parameter yang diperkecil. Namun jika dilakukan zoom atau perbesaran gambar, nampak adanya sedikit pergeseran pada lintasan grafik. Posisi pusat lengan untuk parameter yang diperbesar dan diperkecil mendekati lintasan yang diharapkan pada detik 0,38. Terpaut 0,01 dari waktu yang dibutuhkan sistem dengan parameter awal, yaitu 0.37. Grafik posisi angular untuk parameter yang diperbesar dan diperkecil menyerupai lintasan yang diharapkan pada waktu berturut-turut adalah 0.92 dan 0.95. Sedangkan untuk parameter awal pada detik 0.99. meskipun terdapat perbedaan waktu, namun kesemua grafik dapat menyerupai lintasan yang diharapkan. Dengan demikian dapat disimpulkan bahwa pengendali SMC yang telah didesain tahan terhadap perubahan parameter yang merupakan gangguan dalam (internal disturbance).
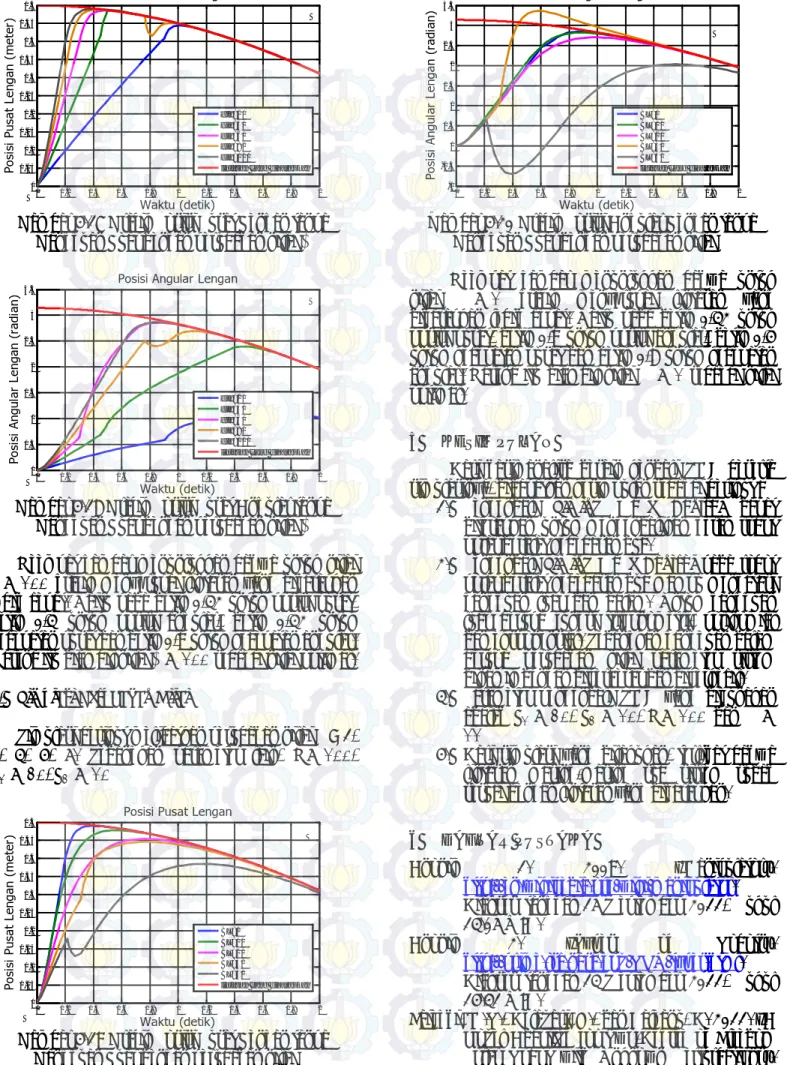
d. Simulasi Perubahan Nilai 𝜆𝜆1
Simulasi berikut melibatkan perubahan nilai 𝜆𝜆1= 10, 20, 30, 40, 50. Sedangkan parameter lain Φ = 1, 𝜂𝜂 = 100, 𝜆𝜆2= 10
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Posisi Pusat Lengan
Waktu (detik)
Posisi Pusat Lengan (meter)
Lintasan yang diharapkan Posisi Pusat Lengan
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0 0.5 1 1.5 2 2.5 3
3.5 Posisi Angular Lengan
Waktu (detik)
Posisi Angular Lengan (rad) Lintasan yang diharapkan Posisi Angular Lengan
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45
0.5 Posisi Pusat Lengan
Waktu (detik)
Posisi Pusat Lengan (meter)
Lintasan yang diharapkan Posisi Pusat Lengan
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0 0.5 1 1.5 2 2.5 3 3.5
Posisi Angular Lengan
Waktu (detik)
Posisi Angular Lengan (rad) Lintasan yang diharapkan Posisi Angular Lengan
8 Gambar 4.13 Grafik Posisi Pusat Lengan tanpa
Gangguan luar dengan perubahan nilai λ1
Gambar 4.14 Grafik Posisi Angular Lengan tanpa Gangguan luar dengan perubahan nilai λ1 Pada grafik posisi dan kecepatan pusat, grafik menyerupai lintasan yang diharapkan lebih cepat ketika λ1= 20 yaitu pada detik 0,34 untuk grafik posisi pusat dan detik 0,37 untuk grafik kecepatan pusat. Akan tetapi, untuk grafik posisi dan kecepatan angular, grafik menyerupai lintasan yang diharapkan lebih cepat ketika λ1= 40 yaitu pada detik 0,72 untuk posisi angular dan detik 0,73 untuk kecepatan angular.
Namun, karena λ1 merupakan parameter pengendali pada subsistem pusat lengan, maka diambil λ1= 20 sebagai nilai optimal.
e. Simulasi Perubahan Nilai 𝜆𝜆2
Simulasi berikut melibatkan perubahan nilai 𝜆𝜆2= 10, 20, 30, 40, 50. Sedangkan parameter lain Φ = 1, 𝜂𝜂 = 100, 𝜆𝜆1 = 20
Gambar 4.15 Grafik Posisi Pusat Lengan tanpa Gangguan Luar dengan perubahan nilai λ2
Gambar 4.16 Grafik Posisi Angular Lengan tanpa Gangguan Luar dengan perubahan nilai λ2 Pada grafik posisi dan kecepatan pusat, perubahan nilai λ2 tidak terlalu mempengaruhi lintasan. Untuk tiap nilai λ2 grafik posisi pusat menyerupai lintasan yang diharapkan pada detik 0,32 dan grafik kecepatan pusat pada detik 0,4. hanya ada sedikit penyimpangan saat detik 0.6 untuk λ2= 10.
Sedangkan untuk grafik posisi dan kecepatan angular, grafik menyerupai lintasan yang diharapkan lebih cepat ketika λ2= 10 yaitu pada detik 0,9 untuk posisi angular dan detik 1,1 untuk kecepatan angular. Oleh karena itu diambil λ2= 10 sebagai nilai optimal.
f. Simulasi Perubahan Nilai 𝜂𝜂
Simulasi berikut melibatkan perubahan nilai 𝜂𝜂=
20, 40, 60, 80, 100. Sedangkan parameter lain Φ = 1, 𝜆𝜆1= 20, 𝜆𝜆2= 10
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45
0.5 Posisi Pusat Lengan
Waktu (detik)
Posisi Pusat Lengan (meter)
lamda1=10 lamda1=20 lamda1=30 lamda1=40 lamda1=50 lintasan yang diharapkan
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0 0.5 1 1.5 2 2.5 3
3.5 Posisi Angular Lengan
Waktu (detik)
Posisi Angular Lengan (radian)
lamda1=10 lamda1=20 lamda1=30 lamda1=40 lamda1=50 lintasan yang diharapkan
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45
0.5 Posisi Pusat Lengan
Waktu (detik)
Posisi Pusat Lengan (meter)
lamda2=5 lamda2=10 lamda2=15 lamda2=20 lamda2=25 lintasan yang diharapkan
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0 0.5 1 1.5 2 2.5 3
3.5 Posisi Angular Lengan
Waktu (detik)
Posisi Angular Lengan (radian)
lamda2=5 lamda2=10 lamda2=15 lamda2=20 lamda2=25 lintasan yang diharapkan
9 Gambar 4.17 Grafik Posisi Pusat Lengan tanpa
Gangguan Luar dengan perubahan nilai η
Gambar 4.18 Grafik Posisi Pusat Angular tanpa Gangguan Luar dengan perubahan nilai η Keempat gambar menunjukkan bahwa untuk nilai η = 100 grafik menyerupai lintasan yang diharapkan lebih cepat. Yaitu pada detik 0,32 untuk posisi pusat, detik 0,3 untuk posisi angular, detik 0,32 untuk kecepatan pusat dan detik 0,9 untuk kecepatan angular.
Karena itu diambil nilai η = 100 sebagai nilai optimal.
g. Simulasi Perubahan Nilai Φ
Simulasi berikut melibatkan perubahan nilai Φ= 1, 2, 3, 4, 5. Sedangkan parameter lain, 𝜂𝜂 = 100, 𝜆𝜆1= 20, 𝜆𝜆2 = 10
Gambar 4.19 Grafik Posisi Pusat Lengan tanpa Gangguan Luar dengan perubahan nilai Φ
Gambar 4.20 Grafik Posisi Angular Lengan tanpa Gangguan Luar dengan perubahan nilai Φ Keempat gambar menunjukkan bahwa untuk nilai Φ = 1 grafik menyerupai lintasan yang diharapkan lebih cepat. Yaitu pada detik 0,32 untuk posisi pusat, detik 0,9 untuk posisi angular, detik 0,4 untuk kecepatan pusat dan detik 0,8 untuk kecepatan angular. Karena itu diambil nilai Φ = 1 sebagai nilai optimal.
5 KESIMPULAN
Dari hasil analisa desain kendali SMC beserta simulasinya, didapatkan kesimpulan sebagai berikut :
1. Pengendali Sliding Mode Control dapat diterapkan untuk mengendalikan gerak robot polar derajat kebebasan dua.
2. Pengendali Sliding Mode Control pada robot polar derajat kebebasan dua mampu mengatasi gangguan luar dan dalam. Untuk gangguan luar berupa fungsi trigonometri, polinomial dan eksponensial. Sedangkan gangguan dalam berupa perubahan nilai parameter sistem dinamik dengan diperbesar dan diperkecil.
3. Parameter pengendali SMC yang digunakan adalah 𝜆𝜆1= 20, 𝜆𝜆2 = 10, 𝜂𝜂 = 100 dan Φ = 4. Dari simulasi yang dilakukan, terlihat bahwa 1.
lintasan masing-masing sub sistem sudah sesuai dengan lintasan yang diharapkan.
6 DAFTAR PUSTAKA
Anonim 1. 2009. “Manipulator”.
http://en.wikipedia.org/wiki/manipulator.
Diakses tanggal 15 S eptember 2011, Pukul 13.05 WIB.
Anonim 2. “Types of Robots”.
http://prime.jsc.nasa.gov/ROV/types.html.
Diakses tanggal 13 S eptember 2011, Pukul 14.31 WIB.
Faieghi, M.R., Delavari, H., dan Baleanu, D. 2011. “A Novel Adaptive for Two-Degree of Freedom Polar Robot with Unknown Perturbations”.
Communication Nonlinier Science and
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45
0.5 Posisi Pusat Lengan
Waktu (detik)
Posisi Pusat Lengan (meter)
eta=20 eta=40 eta=60 eta=80 eta=100
lintasan yang diharapkan
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0 0.5 1 1.5 2 2.5 3
3.5 Posisi Angular Lengan
Waktu (detik)
Posisi Angular Lengan (radian)
eta=20 eta=40 eta=60 eta=80 eta=100
lintasan yang diharapkan
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45
0.5 Posisi Pusat Lengan
Waktu (detik)
Posisi Pusat Lengan (meter)
BL=1 BL=11 BL=21 BL=31 BL=41
lintasan yang diharapkan
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-1 -0.5 0 0.5 1 1.5 2 2.5 3
3.5 Posisi Angular Lengan
Waktu (detik)
Posisi Angular Lengan (radian)
BL=1 BL=11 BL=21 BL=31 BL=41
lintasan yang diharapkan
10 Numerical Simulation Vol. 17, Hal. 1021- 1030
Herlambang, T. 2010. “Desain Pengendali Ketinggian Air dan Temperatur Uap pada Sistem Steam Drum Boiler dengan Metode Sliding Mode Control (SMC)”. Jurusan Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Teknologi Sepuluh Nopember.
Surabaya.
Li, T.S. dan Huang, Y. 2010. ”MIMO Adaptive Fuzzy Terminal Sliding-Mode Controller for Robotic Manipulator”. Information Science Vol. 180, Hal. 4641-4660
Pratama, A.Y.N. 2011. “Desain Pengendalian Robot Beroda Dua Dengan Pendulum Terbalik Menggunakan Pengendali Modus Luncur”.
Jurusan Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Teknologi Sepuluh Nopember Surabaya.
Ross, Shepley L. 1984. Differential Equations.
Canada: John Wiley & Sons.
Sharon, D., Harstein, J., dan Yantian, G. 1992. Robot
& Otomasi Industri. Diterjemahkan oleh : Sutrisno, Yanto Mas’ud, Muchlison. Jakarta : Elex Media Komputindo.
Siciliano, B., Villani, L., Sciavicco, L., dan Oriolo, G.
2009. Robotics : Modelling, Planning and Control. London: Springer.
Spong, M.W., Hutchinson, S., dan Vidyasagar, M.
1989. Robot Modeling and Control. New York : John Willey & Sons, inc.
Zhu, F.Q.Q.M., Winfield, A., dan Melhuish, C. 2003.
“Fuzzy Sliding Mode Control for Discrete Nonlinier Sistems”. Transactions of China Automation Society, Vol. 22, No.2 (Sum No.
86).