PERANCANGAN KENDALI MULTI-MODEL ADAPTIF
UNTUK SISTEM TRANSMISI FLEKSIBEL
Yohanes Mulyadi / 0322135
Jurusan Teknik Elektro, Fakultas Teknik, Universitas Kristen Maranatha Jln. Prof. Drg. Surya Sumantri 65, Bandung 40164, Indonesia
Email : [email protected]
ABSTRAK
Penggunaan material ringan pada sistem yang bersifat fleksibel, dapat meningkatkan performa dinamis yang cepat dan mengurangi konsumsi energi, tetapi pada sistem-sistem tersebut dapat terjadi getaran yang menganggu kinerja sistem tersebut. Oleh karena itu dalam tugas akhir ini, getaran yang terjadi pada sistem transmisi fleksibel akan dihilangkan.
Sistem transmisi fleksibel adalah sebuah plant yang memiliki perubahan harga parameter yang besar dan berubah secara tiba-tiba. Plant yang memiliki perubahan harga parameter yang besar dan berubah secara tiba-tiba, biasanya sangat sulit untuk dikendalikan. Pengendali adaptif tradisional tidak cukup cepat
untuk mengatasi perubahan parameter yang besar dan tiba-tiba, sehingga terjadi respon transien dari sistem yang tidak diharapkan. Sedangkan kendali tetap biasanya menghasilkan performa yang tidak sesuai dengan harapan.
Dalam tugas akhir ini, akan dirancang pengendali untuk sistem transmisi fleksibel dengan menggunakan metode pengendali multi-model dikombinasikan dengan metode pengendali adaptif. Tujuan dari pengendalian adalah menghilangkan respon transien dari sistem yang tidak diharapkan. Penggunaan pengendali multi-model adaptif pada sistem dapat menghilangkan respon transien yang tidak diharapkan. Sehingga getaran yang terjadi pada sistem dapat dikurangi.
MULTI-MODEL ADAPTIVE CONTROL DESIGN FOR
FLEXIBLE TRANSMISSION SYSTEM
Yohanes Mulyadi / 0322135
Department of Electric Engineering, Faculty of Technique, Maranatha Christian University, Jln. Prof. Drg. Surya Sumantri 65, Bandung 40164
Indonesia
Email : [email protected]
ABSTRACT
The use of lightweight material on the flexible structure, causing a fast dynamic performance and reduce energy demands, but these structures are subject to detrimental vibration. Therefore, in this final project, the vibration on the flexible transmission system is the subject to be controlled.
Flexible transmission system is a plant subjected to abrupt and large parameter variations. The plants subjected to abrupt and large parameter variations are generally very difficult to control. A classical adaptive controller or
a fixed robust controller encounter the difficulties to solve this problem. An adaptive controller is not fast enough to follow the parameter variations, therefore unacceptable transients response is performed. Whereas a fixed robust controller normally leads to poor performance due to the large uncertainties.
In this final project, controller for flexible transmission system is designed using multi-model control method combined with adaptive control method. The subject of controlling is to reduce the unacceptable transients response of the system. The unacceptable transient response of the system using multi-model adaptive control can be reduced. Therefore, detrimental vibration of the system can be reduced too.
DAFTAR ISI
Abstrak……….... i
Abstract………... ii
Kata Pengantar……… iii
Daftar Isi………. v
Daftar Tabel……… viii
Daftar Gambar……… ix
Bab I PENDAHULUAN………. 1
I.1 Latar Belakang Masalah………... 1
I.2 Perumusan Masalah………. 1
I.3 Tujuan……….. 2
I.4 Pembatasan Masalah……….... 3
I.5 Sistematika Penulisan……….. 3
Bab II LANDASAN TEORI………... 5
II.1 Penempatan Pole R-S-T ……….……… 5
II.1.1 Struktur……… 5
II.1.2 Regulasi………... 6
II.2 Metode Kendali Adaptif ……… 7
II.2.1 Indirect Adaptive Control ………. 8
II.2.2 Direct adaptive control ………. 9
II.2.3 Parameter Adapatation Algorithm Menggunakan Recursive Least Squares……… 10
II.3 Multi-Model Control (MMC)………. 12
II.3.1 Supervisor ……….. 13
II.4 Multi-Model Adaptive Control (MMAC)……….. 15
Bab III PERANCANGAN ………. 17
III.1 Plant………... 17
III.2 Perancangan Pengendali Dengan Metode Penempatan Pole R-S-T………. 20
III.3 Multi-Model Control (MMC)……… 29
III.4 Kendali Adaptif ……… 34
III.5 Multi-model Adaptive Control (MMAC)……….. 35
Bab IV SIMULASI, DATA PENGAMATAN DAN ANALISIS DATA…….. 37
IV.1 Pengendalian dengan Pengendali Penempatan Pole RST ……… 37
IV.1.1 Model 0 Dikendalikan Oleh Pengendali R-S-T Model 0.... 38 IV.2 Pengendalian Dengan Metode model, Adaptif, dan Multi-model Adpatif……… 49
IV.2.1 Variasi Perubahan Plant 1………... 49
IV.2.1.1 Pengendalian Dengan Pengendali Mutli-model…… 50
IV.2.1.2 Pengendalian Dengan Pengendali Adaptif………… 51
Bab V KESIMPULAN DAN SARAN………... 64
V.1 Kesimpulan………. 64
V.2 Saran………... 64
DAFTAR TABEL
DAFTAR GAMBAR
Gambar 1.1 Struktur transmisi fleksibel 2
Gambar 2.1 Struktur pengendalian dengan metode penempatan pole R-S-T 6 Gambar 2.2 Blok diagram Self Tuning Regulator 9
Gambar 2.3 Blok diagram pengestimasian harga parameter secara on-line 10 Gambar 2.4 Struktur rekrusif dari parameter adaptation algorithm (PAA) 11
Gambar 2.5 Skema pengendali multi-model 13
Gambar 2.6 Skema Multi-Model Adaptive Control (MMAC) 16
Gambar 3.1 Sistem transmisi fleksibel 19
Gambar 3.2 Skema sistem transmisi fleksibel 18 Gambar 3.3 Respon frekuensi untuk model 0, model 6, dan model 12 20 Gambar 3.4 Blok diagram pengendali R-S-T secara umum 30 Gambar 3.5 Diagram blok pengendali multi-model pada sistem transimisi
fleksibel
31
Gambar 3.6 Plant switcher 31
Gambar 3.7 Input 32
Gambar 3.8 Plant 33
Gambar 3.9 Supervisor untuk tiga masukan 34
Gambar 3.10 Unit Delay 34
Gambar 3.11 Diagram blok pengendali adaptif untuk sistem transmisi fleksibel 35 Gambar 3.12 Diagram blok multi-model adaptive control untuk sistem transmisi
fleksibel
36
Gambar 3.13 Supervisor untuk empat masukan 37
Gambar 4.8 Model 12 dikendalikan oleh pengendali R-S-T model 6 45 Gambar 4.9 Model 12 dikendalikan oleh pengendali R-S-T model 12 46
Gambar 4.10 Pengendalian model 0 47
Gambar 4.11 Perbesaran pengendalian model 0 47
Gambar 4.12 Pengendalian model 6 48
Gambar 4.13 Perbesaran pengendalian model 6 48
Gambar 4.14 Pengendalian model 12 49
Gambar 4.15 Perbesaran pengendalian model 12 49 Gambar 4.16 Time-line plant yang akan digunakan pada simulasi pertama 50 Gambar 4.17 Pengendalian dengan multi-model control untuk variasi perubahan
plant 1
51
Gambar 4.18 Posisi switch pada pengendalian dengan multi-model control untuk variasi perubahan plant 1
52
Gambar 4.19 Pengendalian dengan pengendali adaptif untuk variasi perubahan plant 1
53
Gambar 4.20 Pengendalian dengan multi-model adaptive control untuk variasi perubahan plant 1
54
Gambar 4.21 Posisi switch pada pengendalian dengan multi-model adaptive control untuk variasi perubahan plant 1
55
Gambar 4.22 Perbandingan hasil pengendalian pada simulasi dengan variasi perubahan plant 1
56
Gambar 4.23 Perbesaran Perbandingan hasil pengendalian sistem dengan variasi perubahan plant 1
56
Gambar 4.24 Time-line plant yang akan digunakan pada simulasi kedua 57 Gambar 4.25 Pengendalian dengan multi-model control untuk variasi perubahan
plant
58
Gambar 4.26 Posisi switch pada pengendalian dengan multi-model control untuk variasi perubahan plant 1
59
Gambar 4.27 Pengendalian dengan pengendali adaptif untuk variasi perubahan plant 2
Gambar 4.28 Pengendalian dengan multi-model adaptive control untuk variasi perubahan plant 2
61
Gambar 4.29 Posisi switch pada pengendalian dengan multi-model adaptive control untuk variasi perubahan plant 2
62
Gambar 4.30 Perbandingan hasil pengendalian pada simulasi dengan variasi perubahan plant 2
63
Gambar 4.31 Perbesaran perbandingan hasil pengendalian pada simulasi dengan variasi perubahan plant 2
1
BAB I
PENDAHULUAN
Pada bab ini akan dibahas mengenai latar belakang, perumusan masalah,
tujuan, pembatasan masalah, dan sistematika penulisan dari laporan tugas akhir
ini.
I.1. Latar Belakang Masalah
Terdapatnya beberapa plant yang cukup sulit dikendalikan oleh sistem
pengendali tradisional, menyebabkan dikembangkannya metode-metode baru
dalam teknik pengendalian. Sebuah plant bisa dikatakan sulit untuk dikendalikan
bila memiliki sifat yang sangat dinamis, berubah cukup drastis pada saat yang
tiba-tiba, dan memiliki variasi parameter yang sangat luas. Permasalahan ini
menjadi bahan penelitian di bidang kendali.
Ada beberapa metode kendali yang diharapkan bisa mengatasi plant yang
memiliki sifat-sifat seperti di atas, diantaranya metode kendali adaptif tradisional
atau metode kendali robust, namun pengendali adaptif tradisional tidak cukup
cepat untuk mengatasi perubahan parameter yang besar dan tiba-tiba. Sedangkan
kendali tetap biasanya menghasilkan performa yang tidak sesuai dengan harapan.
Metode kendali multi-model adaptif dikembangkan untuk mengatasi masalah
tersebut.
I.2. Perumusan Masalah
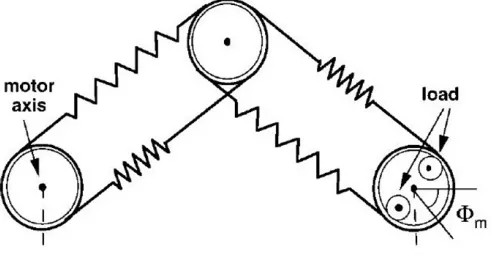
Sebuah sistem transmisi fleksibel dipilih untuk dikendalikan oleh
pengendali multi-model adaptif. Pada sistem ini terdapat tiga katrol yang
dihubungkan oleh dua buah sabuk elastis. Gambar 1.1 adalah plant yang akan
dikendalikan oleh pengendali multi-model adaptif yang akan dirancang pada
tugas akhir ini.
Bab I Pendahuluan
UNIVERSITAS KRISTEN MARANATHA 2
ditambahkan, beban tersebut berbentuk kepingan dengan berat setiap keping
beban adalah sebesar 300 gram.
Gambar 1.1 Struktur transmisi fleksibel
Perubahan berat beban yang terjadi karena penambahan atau pengurangan
jumlah beban secara tiba-tiba dapat menyebabkan sistem menjadi tidak stabil dan
sulit dikendalikan.
Plant transmisi fleksibel ini dipilih karena merepresentasikan sebuah plant
yang sulit dikendalikan. Hal ini karena plant tersebut memiliki redaman yang
sangat rendah dan mempunyai variasi parameter yang sangat besar.
Redaman sistem yang sangat rendah mengakibatkan terjadinya vibrasi
terutama ketika perubahan beban dilakukan. Jadi, untuk menghasilkan sinkronasi
antara besar sudut Φ referensi dengan besar sudut Φ୫ yang baik, getaran yang
terjadi harus diredam.
Pengendali multi-model adaptif akan digunakan untuk mengendalikan
plant di atas agar sistem memiliki performa yang baik dalam arti respon transien
dari sistem cukup cepat untuk mengejar perubahan harga parameter yang terjadi
pada plant, serta redaman yang cukup yang menghindarkan sistem memasuki
kondisi resonansi.
I.3. Tujuan
Menghasilkan sebuah rancangan pengendali multi-model adaptif yang
dapat memberikan performa transien yang baik untuk perubahan harga parameter
yang besar dalam sistem transmisi fleksibel, sehingga sistem tetap stabil walaupun
Bab I Pendahuluan
UNIVERSITAS KRISTEN MARANATHA 3
I.4. Pembatasan Masalah
Hasil dari perancangan pengendali multi-model adaptif yang dirancang
pada tugas akhir ini terhadap sistem transmisi fleksibel hanya diterapkan pada
simulasi dengan menggunakan program MatLab 7.0.1 dan Simulink. Kestabilan
dari metode pengendali multi-model dan metode pengendali adaptif tidak
dibuktikan secara teoritis pada laporan tugas akhir ini. Metode perancangan
pengendali yang akan digunakan pada tugas akhir ini adalah metode penempatan
pole R-S-T.
I.5 Sistematika Penulisan
Sistematika penulisan dalam tugas akhir ini dibagi secara garis besar
dalam lima bab, yang meliputi :
• BAB I PENDAHULUAN
Berisi latar belakang, perumusan masalah, tujuan, pembatasan
masalah, dan sistematika penulisan sebagai gambaran umum tugas
akhir yang akan dilakukan.
• BAB II LANDASAN TEORI
Pada bab ini akan dibahas mengenai pengendalian dengan metode
adaptif, juga pengendalian dengan metode multi-model. Akan
dibahas pula mengenai perancangan pengendali dengan metode
penempatan pole R-S-T.
• BAB III PERANCANGAN
Pada bab ini akan dibahas tentang cara perancangan dari
pengendali dengan metode penempatan pole R-S-T untuk
mengendalikan plant transmisi fleksibel. Juga akan dibahas
penerapan metode kendali multi-model dan metode kendali adaptif
pada sistem.
• BAB IV SIMULASI, PENGAMATAN DATA DAN ANALISIS
Pada bab ini akan dilakukan analisa hasil simulasi dari
pengendalian, baik pengendalian dengan pengendali tetap tunggal,
Bab I Pendahuluan
UNIVERSITAS KRISTEN MARANATHA 4
pengendali multi-model dan pengendali adaptif (multi-model adaptive control).
• BAB V KESIMPULAN DAN SARAN
Bab ini merupakan bab penutup yang membahas mengenai
kesimpulan dan saran-saran untuk perbaikan dan pengembangan
64
BAB V
KESIMPULAN DAN SARAN
Pada bab ini akan diuraikan mengenai kesimpulan dan saran yang didasarkan pada hasil pengamatan dari simulasi yang telah dilakukan.
V.1 Kesimpulan
Setelah menggunakan pengendali yang dirancang dengan metode
multi-model adaptif, vibrasi yang dihasilkan oleh sistem transmisi fleksibel dapat direndam dengan baik. Jika dibandingkan dengan hasil pengendalian dengan pengendali multi-model dan pengendali adaptif, pengendalian dengan pengendali multi-model adaptif menghasilkan redaman yang lebih baik.
Kekurangan dari pengendali adaptif yang tidak bisa mengatasi perubahan harga parameter yang besar, dapat diatasi oleh pengendali multi-model (switching). Sedangkan kekurangan dari pengendali multi-model yang tidak bisa memberikan pengendalian dengan akurat, dapat diatasi dengan metode pengendali adaptif (tunning). Sehingga penggabungan kedua metode pengendali ini akan membentuk sebuah pengendali yang dapat diandalkan untuk mengatasi sistem yang memiliki perubahan harga parameter yang besar dan berubah secara tiba-tiba. Hasil tersebut dapat terlihat pada hasil simulasi yang telah dibahas pada bab sebelumnya.
V.2 Saran
Untuk pengembangan tugas akhir ini disaranakan agar:
• Mencoba metode pengendali selain metode perancangan pengendali dengan penempatan pole R-S-T agar menghasilkan redaman vibrasi yang lebih baik.
• Pemilihan jumlah model tetap pada pengendali multi-model harus ditentukan seomptimal mungkin.
• Menggunakan pengendali robust untuk mengurangi pengendali tetap pada pengendali multi-model adaptif.
65
DAFTAR PUSTAKA
1. Landau, I.D. 1990. System Identification And Control Design. Englewood Cliffs, NJ: Prentice Hall
2. Karimi, Alireza. Ioan Dore Landau. and Nader Motee. Efects of the design parameters of multimodel adaptive control on the performance of a fexible transmission system. INTERNATIONAL JOURNAL OF ADAPTIVE CONTROL AND SIGNAL PROCESSING, Int. J. Adapt. Control Signal
Process. 2001; 15:335}352 (DOI: 10.1002/acs.670)