3
BAB III
PERANCANGAN SISTEM KENDALI SUHU AIR PADA
MESIN ESPRESSO SEMI OTOMATIS
3.1 Metodologi Penelitian
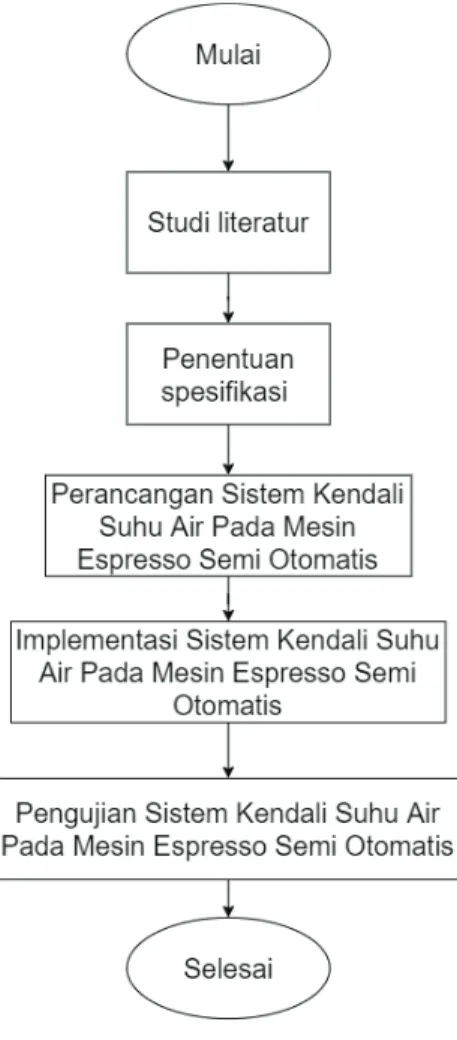
Pada penelitian ini akan dirancang sistem kendali suhu air pada mesin espresso semi otomatis dengan menggunakan kontroler PID. Pada perancangan ini pemanas air atau thermoblock diharapkan dapat menyesuaikan suhu yang telah ditentukan dan menjaga kestabilan suhu tersebut secara otomatis. Adapun diagram alir penelitian yang dilakukan ditunjukkan pada Gambar 3.1.
Gambar 3.1 Diagram alir penelitian.
Pada tahap awal penelitian adalah melakukan peninjauan penelitian-penelitian sebelumnya yang relevan dengan pengendalian suhu pada penelitian ini. Selanjutnya dilakukan penentuan spesifikasi sistem dan kemudian dilanjutkan
dengan perancangan sistem, dimana pada tahap ini penulis mendesain rangkaian sistem kendali sesuai dengan spesifikasi yang diperlukan. Apabila telah diperoleh hasil perancangan, maka dilanjutkan ke tahap implementasi yang merupakan tahapan dimana sistem dan komponen diintegrasikan sesuai dengan perancangan yang telah dilakukan. Kemudian dilakukan pengujian terhadap sistem yang telah direalisasikan.
3.2 Perancangan Sistem Kendali Suhu
Perancangan sistem kendali suhu pada mesin espresso semi otomatis terdiri dari beberapa bagian diantaranya penalaan spesifikasi sistem dan desain skematik rangkaian. Pada Gambar 3.2 merupakan sistem yang akan dirancang pada mesin espresso semi otomatis.
Gambar 3.2 Diagram blok sistem mesin espresso semi otomatis.
Gambar 3.2 merupakan diagram blok keseluruhan sistem mesin espresso semi otomatis yang terdiri dari beberapa bagian diantaranya aktuator untuk mengalirkan air seperti pompa dan solenoid valve, kemudian aktuator untuk menuangkan bubuk kopi seperti servo dan vibratory DC, lalu interface untuk menampilkan informasi melalui LCD dan mengontrol mesin menggunakan push button, kemudian sistem
pengendali suhu yaitu AC dimmer, sensor suhu, dan thermoblock. Dalam penelitian ini penulis melakukan perancangan dan implementasi pada bagian diagram blok dengan label berwarna biru.
3.2.1 Spesifikasi Sistem Kendali Suhu
Berikut spesifikasi dari sistem kendali suhu air yang akan dirancang pada mesin espresso semi otomatis yang telah ditentukan:
1. Sistem pengendali suhu mampu memanaskan air hingga suhu air tersebut mencapai 95ºC dan menjaga suhu air tetap stabil pada 95ºC.
2. Sensor suhu yang digunakan pada sistem memiliki galat kurang dari 10%. 3. Metode kendali yang digunakan untuk mengatur suhu adalah kontroler
proporsional, integral, dan derivatif dengan set point sebesar 95ºC dan nilai toleransi suhu ± 5°C.
3.2.2 Desain Skematik Rangkaian
Desain rancangan sistem kendali suhu dilakukan untuk mengetahui konfigurasi antar komponen yang digunakan. Tujuan didesain skematik rangkaian sistem kendali suhu untuk memudahkan proses implementasi. Perancangan skematik dibutuhkan untuk proses konfigurasi dan integrasi komponen yang telah dipilih sebelumnya. Adapun komponen-komponen yang akan digunakan pada perancangan ini adalah sebagai berikut:
1. Mikrokontroler
Sistem yang akan dirancang membutuhkan komponen utama yang dapat mengkoordinasikan semua subsistem. Kebutuhan sistem ini berupa mikrokontroler yang praktis, murah, dan mudah dikendalikan, serta tentunya dapat mempermudah kebutuhan untuk mencapai spesifikasi alat yang telah ditentukan. Untuk memenuhi kebutuhan tersebut, dipilihlah mikrokontroler Arduino Mega 2560 dikarenakan mempunyai pin yang cukup banyak untuk memfasilitasi komponen yang digunakan kemudian kelebihan Arduino Mega juga yaitu penggunaannya yang mudah serta memiliki banyak library yang tersedia, sehingga dapat memudahkan pengguna dalam membuat suatu program kontrol PID dan mengintegrasikan dengan komponen lainnnya.
2. Sensor suhu
Penggunaan sensor suhu pada perancangan ini diperuntukkan untuk memantau keadaan suhu air pada proses pemanasan air. Data berupa suhu ini akan menjadi elemen feedback pada kontroler PID. Salah satu yang digunakan pada sistem kendali suhu ini yaitu adalah sensor suhu thermocouple type K yang memiliki range pengukuran -200⁰C sampai 1250⁰C dengan tingkat ketelitian 0,25⁰C dengan modul MAX6675 untuk memproses tegangan yang dihasilkan dari sensor suhu termokopel. MAX6675 dapat melakukan koreksi atas perubahan pada suhu sekitar dengan kompensasi cold junction. MAX6675 dapat mengkonversi suhu sekitar ke bentuk tegangan menggunakan sensor dioda temperatur. Untuk dapat melakukan pengukuran aktual, MAX6675 mengukur tegangan dari output termokopel dan tegangan dari sensing dioda [13]. Pada Gambar 3.3 ditunjukkan sensor suhu termokopel dengan modul MAX6675. Adapun spesifikasi dari sensor suhu yang digunakan ditunjukkan pada Tabel 3.1.
Gambar 3.3 Sensor suhu thermokopel tipe K dengan modul MAX6675 [13]. Tabel 3.1 Spesifikasi sensor suhu thermokopel tipe K.
NAMA
KOMPONEN SENSOR SUHU THERMOCOUPLE
Fungsi Memonitoring suhu air pada thermoblock
Rentang
pengukuran -200°C sampai 1250°C Input Suhu air
Output Sinyal tegangan Tegangan
Input
3. AC dimmer
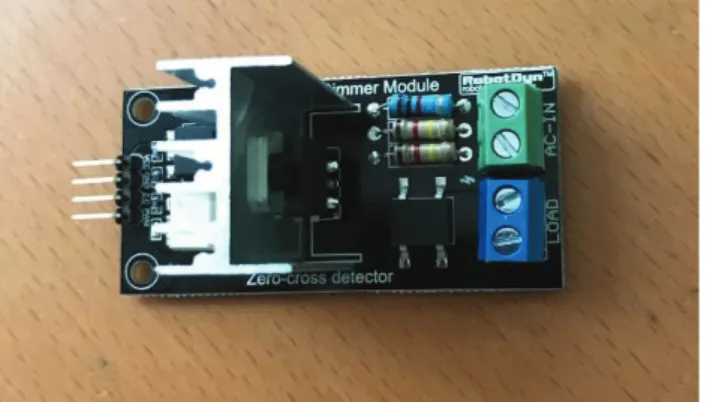
Pemanas sendiri terdiri dari elemen pemanas, yang ditenagai oleh tegangan AC dan menghasilkan panas. Dengan menyesuaikan daya pada elemen pemanas, panas yang dilepaskan oleh pemanas akan bervariasi. Agar dapat mengatur daya, diperlukan rangkaian yang dapat memutus tegangan AC untuk mengubah daya yang diberikan pada komponen tersebut. Dengan AC dimmer tegangan yang disalurkan dapat diubah dan memberikan keluaran panas yang linier dengan tegangan masukan. Modul AC dimmer ditunjukkan pada Gambar 3.4. Adapun spesifikasi dari modul AC dimmer yang digunakan ditunjukkan pada Tabel 3.2.
Gambar 3.4 Modul AC dimmer. Tabel 3.2 Spesifikasi AC dimmer.
NAMA
KOMPONEN AC DIMMER
Fungsi Mengendalikan tegangan yang masuk
Daya maksimum
yang dikontrol 600V - 6A
Input Tegangan AC
Output Tegangan yang sudah dikontrol Tegangan input 5V
4. Thermoblock
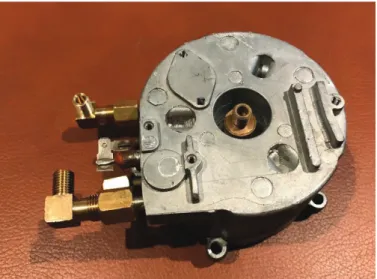
Thermoblock pada dasarnya adalah elemen pemanas dimana merupakan komponen yang mengubah energi listrik menjadi panas. Pada perancangan ini thermoblock dibutuhkan sebagai aktuator dari sistem kendali untuk menghasilkan panas pada air yang juga dibutuhkan pada mesin espresso untuk proses brewing. Pada perancangan ini digunakan elemen pemanas yaitu thermoblock dengan daya
listrik maksimum mencapai 1500W dengan suhu maksimal 400°C. Thermoblock ditunjukkan pada Gambar 3.5. Adapun spesifikasi thermoblock yang digunakan ditunjukkan pada Tabel 3.3.
Gambar 3.5 Thermoblock. Tabel 3.3 Spesifikasi thermoblock.
NAMA KOMPONEN THERMOBLOCK
Fungsi Memanaskan air
Input maksimal AC 220V
Output Energi panas
Suhu maksimal pemanasan
400 °C
Sistem kendali suhu terdiri dari mikrokontroler Arduino Mega 2560 yang terhubung dengan sensor suhu termokopel tipe K MAX6675 melalui pin digital 9, 10, dan 11 serta modul AC dimmer yang terhubung melalui pin 2 dan 8. Mikrokontroler akan mengolah data masukan dari sensor suhu sehingga dihasilkan data berupa suhu yang digunakan dalam perhitungan PID dan mikrokontroler akan meneruskan hasil perhitungan PID ke modul AC dimmer yang akan mengatur tegangan masuk ke thermoblock. Selanjutnya proses implementasi dilakukan dengan mengacu pada desain rangkaian skematik yang telah dibuat. Desain skematik rangkaian sistem kendali suhu ditunjukkan pada Gambar 3.6.
Gambar 3.6 Desain skematik rangkaian sistem kendali suhu. 3.2.3 Penalaan Parameter PID
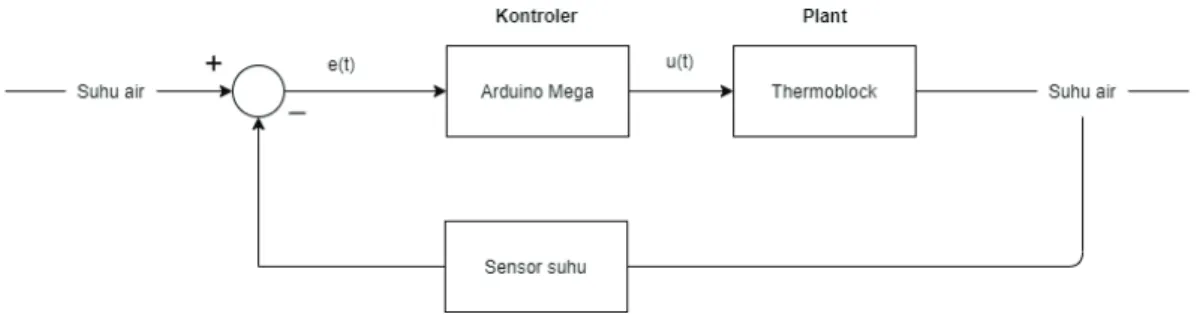
Permasalahan terbesar dalam perancangan kontroler PID adalah menentukan nilai Kp, Ki dan Kd. Jika pemodelan matematika tidak diketahui maka dilakukan dengan eksperimen atau hand tuning terhadap sistem untuk melakukan penalaan PID. Karena dalam penyusunan model matematik plant tidak mudah, sehingga dikembangkan suatu metode eksperimental. Metode ini didasarkan pada respon sistem yang dihasilkan ketika suatu perubahan parameter. Dengan metode eksperimental, model matematik perilaku plant tidak diperlukan lagi. Hanya dengan menggunakan data berupa kurva keluaran plant (respon sistem), penalaan Kp, Ki, Kd dapat dilakukan. Pada Gambar 3.7 dapat dilihat blok diagram kendali PID dengan tipe rangkaian closed loop dimana kestabilan air dibutuhkan untuk mencapai setpoint tertentu. Pengendali menggunakan Arduino lalu heater atau thermoblock berlaku sebagai plant pada sistem kendali. Pada penelitian ini diharapkan alat dapat mengendalikan suhu air sesuai spesifikasi yang telah ditentukan oleh karena itu diperlukan sensor suhu yang berlaku sebagai pemantau suhu.
Gambar 3.7 Blok diagram kendali PID.
Untuk pemberian paremeter nilai Kp, Kd, dan Ki pada perancangan ini dilakukan dengan cara manual atau biasa disebut hand tuning. Penalaan pada tahap ini bertujuan untuk memperoleh nilai yang paling tepat untuk paremeter Kp, Kd, dan Ki sehingga dapat diperoleh sebuah sistem kendali dengan respon sistem yang optimal. Penalaan ini dilakukan untuk mengetahui bagaimana karakteristik dari respon sistem yang dihasilkan sehingga dapat diketahui apakah kendali PID telah sesuai spesifikasi atau tidak. Langkah awal proses tuning ini dilakukan dengan mengatur nilai Kp sehingga didapatkan respon sistem mendekati set point. Respon hasil perancangan nilai Kp ditunjukkan pada Gambar 3.8 sampai dengan Gambar 3.12.
Gambar 3.8 Respon sistem untuk Kp = 10; Ki = 0; Kd=0.
80 82 84 86 88 90 92 94 96 98 100 1 29 57 85 113 141 169 197 225 253 281 309 337 365 393 421 449 477 505 533 561 589 617 645 673 701 729 757 Suhu ºC Waktu (detik) Set point Suhu
Gambar 3.9 Respon sistem untuk Kp = 20; Ki = 0; Kd = 0.
Gambar 3.10 Respon sistem untuk Kp = 30; Ki = 0; Kd = 0.
.
Gambar 3.11 Respon sistem untuk Kp = 40; Ki; 0; Kd = 0
80 82 84 86 88 90 92 94 96 98 1 44 87 130 173 216 259 302 345 388 431 474 517 560 603 646 689 732 775 818 861 904 947 990 1033 1076 1119 1162 Suhu ºC Waktu (detik) Set point Suhu
80 82 84 86 88 90 92 94 96 98 100 1 43 85 127 169 211 253 295 337 379 421 463 505 547 589 631 673 715 757 799 841 883 925 967 1009 1051 1093 1135 Suhu ºC Waktu (detik) Set point Suhu
80 82 84 86 88 90 92 94 96 98 100 1 36 71 106 141 176 211 246 281 316 351 386 421 456 491 526 561 596 631 666 701 736 771 806 841 876 911 946 Waktu (detik)
Gambar 3.12 Respon sistem untuk Kp = 50; Ki; 0; Kd = 0. Tabel 3.4 Karakteristik dari respon sistem dengan set point 95ºC.
Kp Ki Kd Rise Time (detik) Overshoot (%) Settling time (detik) Steady State Error (%) 10 0 0 176,4 2,36 239,5 0,789 20 0 0 169,0 1,31 223,67 0,789 30 0 0 168,2 3,68 417,35 1,315 40 0 0 167 3,42 928,4 1,152 50 0 0 165,1 12,63 1391 3,105
Berdasarkan Tabel 3.4 dapat dilihat bahwa ketika nilai Kp sebesar 20 didapatkan nilai steady state error sebesar 0,789%. Nilai error steady state ini nantinya bisa dihilangkan dengan cara menambahkan kontroler integral. Maka dari itu percobaan dilanjutkan untuk mencari nilai Ki dengan menggunakan nilai Kp sebesar 20 dan setpoint tetap pada 95°C. Respon hasil perancangan parameter Ki ditunjukkan pada Gambar 3.13 sampai dengan Gambar 3.15.
80 85 90 95 100 105 110 1 50 99 148 197 246 295 344 393 442 491 540 589 638 687 736 785 834 883 932 981 1030 1079 1128 1177 1226 1275 1324 1373 Suhu ºC Waktu (detik) Set point Suhu
Gambar 3.13 Respon sistem untuk Kp = 20; Ki; 0.1; Kd = 0.
Gambar 3.14 Respon sistem untuk Kp = 20; Ki; 0.05; Kd = 0.
Gambar 3.15 Respon sistem untuk Kp = 20; Ki; 0.01; Kd = 0.
80 82 84 86 88 90 92 94 96 98 1 41 81 121 161 201 241 281 321 361 401 441 481 521 561 601 641 681 721 761 801 841 881 921 961 1001 1041 1081 Suhu ºC Waktu (detik) Set point Suhu
80 82 84 86 88 90 92 94 96 98 1 59 117 175 233 291 349 407 465 523 581 639 697 755 813 871 929 987 1045 1103 1161 1219 1277 1335 1393 1451 1509 1567 Suhu ºC Waktu (detik) Set point Suhu
80 82 84 86 88 90 92 94 96 98 1 55 109 163 217 271 325 379 433 487 541 595 649 703 757 811 865 919 973 1027 1081 1135 1189 1243 1297 1351 1405 1459 Suh u ºC Waktu (detik) Set point Suhu
Tabel 3.5 Karakteristik dari respon sistem dengan Kp = 20 dan set point 95ºC. Kp Ki Kd Rise Time (detik) Overshoot (%) Settling time (detik) Steady State Error (%) 20 0.1 0 175,2 1,84 236,10 0,526 20 0.05 0 174,2 2,15 238,68 0,231 20 0.01 0 172,6 1,84 231,15 0,789
Berdasarkan Tabel 3.5, perancangan dengan bermacam nilai parameter Ki dibandingkan dan didapatkan nilai Ki sebesar 0,1 dengan nilai error steady state sebesar 0.231% dengan overshoot sebesar 2,15. Maka dari itu percobaan dilanjutkan untuk mencari nilai Kd untuk meredam overshoot yang terjadi, dengan menambahkan kontroler derivatif menggunakan nilai Kp sebesar 20 lalu Ki sebesar 0,05 kemudian set point tetap pada 95°C. Respon hasil perancangan parameter Kd ditunjukkan pada Gambar 3.16 sampai dengan 3.18.
Gambar 3.16 Respon sistem untuk Kp = 20; Ki; 0.05; Kd = 10.
60 65 70 75 80 85 90 95 100 1 42 83 124 165 206 247 288 329 370 411 452 493 534 575 616 657 698 739 780 821 862 903 944 985 1026 1067 1108 Suhu ºC Waktu (detik) Set point Suhu
Gambar 3.17 Respon sistem untuk Kp = 20; Ki; 0.05; Kd = 5.
Gambar 3.18 Respon sistem untuk Kp = 20; Ki; 0.05; Kd = 1.
Tabel 3.6 Karakteristik dari respon sistem dengan Kp = 20; Ki = 0.05 dan set point 95ºC. Kp Ki Kd Rise Time (detik) Overshoot (%) Settling time (detik) Steady State Error (%) 20 0,05 10 177,2 1,8 230,12 0,52 20 0.05 5 178,9 1,15 236,55 0,263 20 0.05 1 178,9 1,72 241,15 0,526
Berdasarkan Tabel 3.6, karakteristik respon sistem yang didapatkan dianggap sudah memenuhi spesifikasi yang ditentukan dan telah mencapai performasi optimalnya
60 65 70 75 80 85 90 95 100 1 44 87 130 173 216 259 302 345 388 431 474 517 560 603 646 689 732 775 818 861 904 947 990 1033 1076 1119 1162 Suh u ºC Waktu (detik) Set point Suhu
60 65 70 75 80 85 90 95 100 1 43 85 127 169 211 253 295 337 379 421 463 505 547 589 631 673 715 757 799 841 883 925 967 1009 1051 1093 1135 Suhu ºC Waktu (detik) Set point Suhu
ketika nilai Kp sebesar 20, Ki sebesar 0,05, dan Kd sebesar 1 dengan nilai overshoot sebesar 1,15% serta nilai steady state error sebesar 0,263.
Dari data hasil percobaan dapat diamati bahwa perubahan konstanta Kp, Ki, dan Kd akan memberikan respon sistem yang berbeda-beda. Pemberian nilai Kp akan memperbaiki rise time dari sistem kendali PID, semakin tinggi konstanta nilai Kp, maka rise time menjadi semakin kecil, namun disatu sisi meningkatkan nilai overshoot dari sistem kendali. Sebaliknya ketika nilai Kp dikurangi, maka nilai rise time akan semakin besar, namun menghasilkan overshoot yang semakin kecil. Pemberian nilai Ki pada sistem kendali PID akan mempengaruhi dari segi steady state error. Semakin besar nilai Ki yang diberikan maka nilai steady state error akan semakin kecil, dan pada percobaan memberikan nilai Kp senilai 20, nilai Ki sebesar 0,05, dan nilai Kd di set ke angka 0, maka didapatkan bahwa steady state error-nya diredam bernilai 0,231%. Namun akan meningkatkan settling time dari sistem kendali. Untuk nilai Kd, digunakan untuk memperbaiki nilai overshoot. Ketika sistem diberi konstanta Kp, Ki, dan Kd masing-masing adalah sebesar 20, 0,05, dan 1, maka overshoot yang dihasilkan semakin kecil, settling time lebih lama, dan dengan persentase steady state error yang besar. Namun ketika diberi nilai Kd sebesar 1, maka rise time akan semakin lama, tetapi nilai overshoot yang semakin kecil, settling time semakin cepat, dan dengan persentase steady state error yang meningkat. Dari pengamatan yang dilakukan, nilai paling optimal untuk sistem pada sistem kendali suhu ini adalah Kp sebesar 20, Ki sebesar 0,05, dan Kd sebesar 5. Nilai-nilai konstanta tersebut menjadikan sistem menjadi seimbang di banyak aspek sekaligus. Kemudian untuk tingkat performansi hasil akhir dari respon sistem yang dihasilkan telah memenuhi spesifikasi yang telah ditentukan sebelumnya dengan rise time sebesar 177,2 detik, overshoot sebesar 1,15%, settling time sebesar 235,55 detik, dan steady state error sebesar 0,263%.