Abstrak— Pada era saat ini sering kita jumpai banyak di sekitar kita pasien yang menderita lumpuh, baik dikarenakan kecelakaan maupun hal yang lainnya. Pasien yang lumpuh tidak dapat melakukan hal apapun tanpa bantuan orang lain. Realita yang terjadi banyak diantara mereka yang menggunakan kursi roda guna mempermudah aktivitas mereka. Ada juga diantara mereka yang kesusahan menggerakkan kursi roda menggunakan tangan mereka sehingga mereka membutuhkan bantuan orang lain untuk melakukan aktivitas diatas kursi roda, dalam hal ini untuk berpindah tempat.
Perkembangan teknologi yang pesat dalam bidang elektronika dapat membantu menyelesaikan permasalahan yang sering kita jumpai tersebut. Perkembangan ini direalisasikan dalam teknologi pada sebuah kursi roda. Kursi roda merupakan alat bantu gerak untuk penyandang cacat dan orang-orang yang sedang berada dalam kondisi sakit yang membutuhkan mobilitas untuk dapat melakukan aktivitas sehari-hari. Kegunaan kursi roda secara umum adalah untuk membantu pasien yang mempunyai gangguan sistem motorik pada kakinya.
Pada tugas akhir ini akan dirancang sebuah rancang bangun kursi roda elektrik yang menggunakan perintah suara guna mempermudah penyandang cacat. Kursi roda ini mampu bergerak sesuai dengan keinginan pasien hanya dengan perintah suara yang pasien keluarkan, contoh: maju, mundur, ataupun berputar dan lain-lain. Selain itu, dapat juga ditambahkan alat komunikasi sehingga penyandang cacat dapat dengan mudah melakukan komunikasi dengan siapapun dan dimanapun tanpa harus memegang telpon. Dengan system komunikasi diatas, maka kursi roda dapat digunakan sebagai alat bantu pasien yang lumpuh tanpa bantuan orang lain. Kata Kunci— wheel chair, kursi roda,elektrik,voice
command,cacat lumpuh
I. PENDAHULUAN
ursi roda merupakan alat bantu gerak untuk penyandang cacat dan orang yang sedang dalam kondisi sakit yang membutuhkan mobilitas untuk dapat melakukan aktivitas sehari-hari. Kegunaan kursi roda secara umum adalah untuk membantu pasien yang mempunyai gangguan sistem motorik pada kakinya. Gangguan tersebut dibagi menjadi dua tingkatan yaitu
a. Parah
Terjadi pada pasien penderita stroke atau bahkan lumpuh total. Pasien tidak dapat menjalankan kursi rodanya sendiri sehingga butuh orang lain untuk membantunya.
b. Tidak Parah
Yang termasuk dalam tingkatan ini adalah pasien yang bermasalah/ cacat pada bagian kaki saja. Dalam hal ini, pasien masih mampu menjalan kan kursi rodanya dengan menggunakan tangannya.
Saat ini banyak sekali jenis kursi roda yang tersedia di pasaran, mulai dari kursi roda manual hingga kursi roda yang berpenggerak motor bahkan dioperasikan menggunakan joystick.
Berdasarkan hasil survey yang telah dilakukan oleh Tim Pengembangan Produk Jurusan Teknik Mesin ITS ke beberapa tempat seperti rumah sakit dan panti-panti penyandang cacat pada tahun 2009, didapatkan bahwa apresiasi para penyandang cacat akan kebutuhan kursi roda yang lebih atraktif dan otomatis sangatlah besar. Hal ini terjadi karena mereka kurang puas dengan kursi roda sekarang yang tidak lengkap (58,3%), kurang nyaman (25%) dan untuk pengoperasiannya yang sulit (4,1%). Mereka juga menyatakan bahwa kursi roda manual sekarang ini belum bisa membuat mereka melakukan kegiatan kegiatan layaknya orang normal (12,6%).Hal ini memberikan pemikiran baru akan kursi roda yang dapat dikendalikan perintah pengenalan suara dengan handphone android.
Android adalah sistem operasi milik google pada handphone maupun tablet yang pada saat ini yang memungkinkan pengguna untuk mengembangkan sistem operasi tersebut dengan cara membuat aplikasi-aplikasi sesuai kebutuhan dari pengguna dan pengembang aplikasi.
Handphone android yang akan digunakan sebagai pengendali kursi roda dengan pengenalan perintah suara memiliki interface berupa aplikasi yang memungkinkan fungsi pengenalan perintah melalui suara yang langsung diterjemahkan melalui server google. Dari hasil terjemahan dari server google akan langsung dikembalikan ke handphone android untuk dikenali perintahnya. Ketika perintah tersebut dapat dikenali oleh android, maka android akan mengirimkan data perintah yang akan dikirimkan melalui bluetooth dari handphone android.
Rancang Bangun Kursi Roda Elektrik
Menggunakan Perintah Suara Berbasis Aplikasi
Android
Liem,Yuliana Kathina Hatta, Pujiono, ST.,MT.dan Ir. Tasripan,MT.
Teknik Elektro, Fakultas Teknik Industri, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman Hakim, Surabaya 60111
E-mail: [email protected]
II. TINJAUAN PUSTAKA A. Kursi Roda
Kursi roda merupakan alat bantu yang bermanfaat untuk membantu pasien maupun orang yang cacat yang tidak mampu menggunakan kakinya untuk berjalan, dengan kata lain kesulitan berjalan menggunakan kaki. Banyak pasien menggunakan kursi roda dikarenakan terkena penyakit tulang, cidera akibat kecelakaan ataupun cacat sejak lahir.
Kursi roda dapat digunakan secara mandiri maupun dengan bantuan orang lain yakni dengan mendorongnya.Kursi rodapun mempunyai banyak model, antara lain: didorong, menjalankan sendiri dengan tangan, atau yang kini muncul adalah otomatis. Kursi roda mempunyai banyak sekali manfaat yakni bisa membantu penggunanya dalam konteks ini pasien untuk bisa berpindah tempat dari satu tempat ke tempat yang lain.
Jenis-jenis Kursi Roda
Kursi roda manual
Merupakan kursi roda yang biasa digunakan dengan tangan oleh penggunanya, dapat juga dioperasikan dengan bantuan orang lain dengan cara didorong. Kursi roda ini merupakan kursi roda yang dipakai dengan manual namun tidak dapat dioperasikan oleh pasien yang juga mengalami cacat di bagian tangannya. Kursi roda manual merupakan kursi roda yang bisa digunakan untuk berbagai aktivitas manusia. Biasanya yang kita ketahui sebuah kursi roda manual berat dan sulit dibawa kemana-mana oleh karena tidak dapat dilipat.
Gambar 1. Kursi roda manual[1]
Kursi roda olahraga
Kursi roda olahraga(sport) merupakan salah satu jenis kursi roda manual yang digunakan bagi para atlit olahraga yang tidak memiliki kaki sehingga mereka bisa menggunakan tangan mereka untuk menggerakkan kursi roda ini. Kursi roda sport ini sengaja didesain khusus yang mana mempunyai roda 3 buah, dimana 2 buah merupakan roda besar dan satunya roda kecil sebagai penjaga kestabilan kursi roda.
Gambar 2. Kursi roda olahraga[2] Kursi roda travelling
Kursi roda travelling atau kerap kali disebut sebagai travelling wheel chair merupakan kursi roda yang digunakan pasien dengan cara dibantu oleh orang lain. Kursi roda ini digunakan dengan cara didorong oleh saudara, rekan, maupun kerabat dekat pengguna kursi roda, sehingga arah dan pergerakan kursi roda ini diatur oleh orang yang mendorongnya. Kursi roda ini cenderung praktis bagi yang membawanya karena bisa dilipat dan tentu saja lebih efisien dalam penggunaannya.
Gambar 3. Kursi roda travelling[3] Kursi roda elektrik
Merupakan kursi roda otomatis yang digerakan oleh motor listrik, sehingga dapat bergerak otomatis sesuai keinginan penggunanya. Kursi roda elektrik ini biasa digunakan dengan menggunakan joystick sehingga dapat dengan mudah pengguna menggerakkan kursi roda ini. Tentunya dengan adanya kemajuan teknologi maka kursi roda ini sangat memudahkan pengguna sehingga tidak kesusahan lagi menggerakkannya dengan bantuan orang lain maupun dengan usaha sendiri yakni mendorongnya menggunakan tangan. Kursi roda elektrik atau juga disebut kursi roda listrik mampu digerakkan maju, mundur, belok kanan, maupun belok kiri sesuai dengan arah pengoperasian joystick. Pada dasarnya kursi roda ini dilengkapi dengan charger untuk mengisi ulang aki atau baterainya.
Gambar 4. Kursi roda elektrik[4]
B. H-Bridge Motor Driver Configuration
Dunia robotika memiliki pengaruh besar dalam otomasi sistem baik dalam industri maupun dalam perancangan mekanis untuk menggerakkan robot. Dasar dalam perancangan mekanis untuk menggerakkan roda robot adalah konfigurasi H-Bridge. Yakni konfigurasi yang memungkinkan motor DC yang digunakan sebagai piranti mekanis untuk menggerakkan robot dapat bergerak ke kiri, kanan, depan maupun belakang menggunakan perintah dari mikrokontroller.
Gambar 5. H-Bridge motor driver[5]
H-bridge tercipta sebagi sebuah IC atau rangkaian yang terintegrasi atau dapat dibuat dari komponen diskrit. Bentuk dari sebuah H-bridge didapatkan dari representasi grafis bentuk dari sejenis rangkaian.Sebuah H-bridges dibuat dan dirangkai untuk membalikkan polaritas dari sebuah motor.tetapi dapat juga digunakan untuk mengerem motor, ketika motor tiba-tiba terhenti sebagaimana terminal motor diperpendek.
Secara umum H-bridge digunakan sebagai inverter. Atau sering dikenal juga sebagai fase tunggal inverter. H-bridge dengan supply DC akan menghasilkan gelombang tegangan persegi ke seluruh beban. Untuk beban induktif murni, gelombangnya menjadi segitiga yang puncaknya tergantung pada induktansi, frekuensi switching, serta tegangan input.H-bridge dirancang untuk menggerakkan motor searah maupun bolak balik. H-bridge dapat dibuat dengan switch, relay, transistor atau MOSFET.
C. Teknologi Speech Recognition
Speech recognition adalah suatu pengembangan
teknik dan sistem yang memungkinkan komputer untuk menerima masukan berupa kata yang diucapkan. Teknologi ini memungkinkan suatu perangkat untuk mengenali dan memahami kata-kata yang diucapkan dengan cara
digitalisasi kata dan mencocokkan sinyal digital tersebut dengan suatu pola tertentu yang tersimpan dalam suatu perangkat.
Kata-kata yang diucapkan diubah bentuknya menjadi sinyal digital dengan cara mengubah gelombang suara menjadi sekumpulan angka yang kemudian disesuaikan dengan kode-kode tertentu untuk mengidentifikasikan kata-kata tersebut. Hasil dari identifikasi kata yang diucapkan dapat ditampilkan dalam bentuk tulisan atau dapat dibaca oleh perangkat teknologi sebagai sebuah komando untuk melakukan suatu pekerjaan.
Penggunaan speech recognition ini telah dipermudah oleh google. Dengan adanya device Android, maka pekerjaan seperti voice recognition telah diambil alih oleh google Android sehingga user tinggal mengaplikasikannya langsung dengan programming menggunakan eclipse.
D. Mikrokontroller AT Mega 16
Mikrokontroller AT MEGA 16 adalah mikrokontroller CMOS 8-bit yang merupakan keluarga AVR buatan Atmel. AVR memiliki 32 register general-purpose, timer/counter dengan metode compare, interrupt eksternal serta internal, serial UART, programmable Watchdog Timer, ADC dan internal PWM. Mikrokontroller adalah sebuah chip yang lebih dari sekedar mikroprosesor karena di dalamnya terdapat ROM(Read-Only Memory),RAM(Random Access Memory), input output, ADC(Analog to Digital Converter), DAC(Digital to Analog Converter) dan serial komunikasi.
.
Gambar6. Mikrokontroller AT Mega 16
Konfigurasi pin AT Mega 16 dengan total jumlahnya ada 40 pin dapat dilihat pada gambar di atas bahwa AT Mega 16 mempunyai 8 pin untuk masing masing port A, Port B, Port C, dan Port D. Guna memaksimalkan tampilan luarnya, AVR menggunakan arsitektur Harvard(dengan memori dan bus terpisah untuk data dan program).
III. PERANCANGAN SISTEM
Perancangan sistem dari alat ini dibagi menjadi dua bagian, yakni: perancangan perangkat keras dan perancangan perangkat lunak.
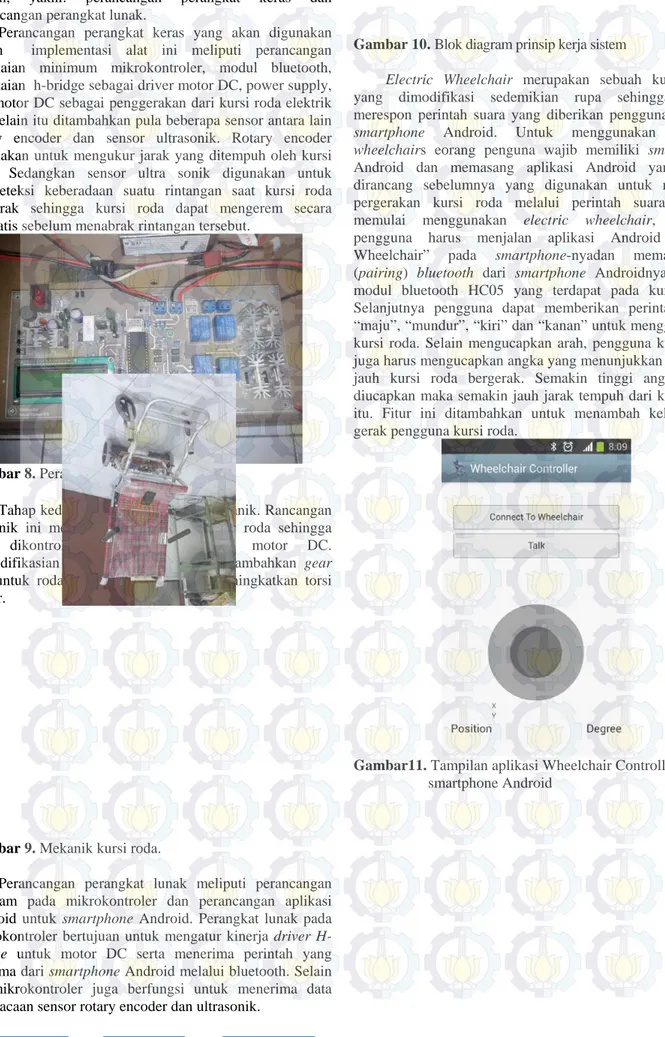
Perancangan perangkat keras yang akan digunakan dalam implementasi alat ini meliputi perancangan rangkaian minimum mikrokontroler, modul bluetooth, rangkaian h-bridge sebagai driver motor DC, power supply, dan motor DC sebagai penggerakan dari kursi roda elektrik ini. Selain itu ditambahkan pula beberapa sensor antara lain rotary encoder dan sensor ultrasonik. Rotary encoder digunakan untuk mengukur jarak yang ditempuh oleh kursi roda. Sedangkan sensor ultra sonik digunakan untuk mendeteksi keberadaan suatu rintangan saat kursi roda bergerak sehingga kursi roda dapat mengerem secara otomatis sebelum menabrak rintangan tersebut.
Gambar 8. Perangkat keras sistem.
Tahap kedua adalah perancangan mekanik. Rancangan mekanik ini meliputi pemodifikasian kursi roda sehingga bisa dikontrol dengan menggunakan motor DC. Pemodifikasian ini dilakukan dengan menambahkan gear
box untuk roda yang bertujuan untuk meningkatkan torsi
motor.
Gambar 9. Mekanik kursi roda.
Perancangan perangkat lunak meliputi perancangan program pada mikrokontroler dan perancangan aplikasi Android untuk smartphone Android. Perangkat lunak pada mikrokontroler bertujuan untuk mengatur kinerja driver
H-Bridge untuk motor DC serta menerima perintah yang
diterima dari smartphone Android melalui bluetooth. Selain itu mikrokontroler juga berfungsi untuk menerima data pembacaan sensor rotary encoder dan ultrasonik.
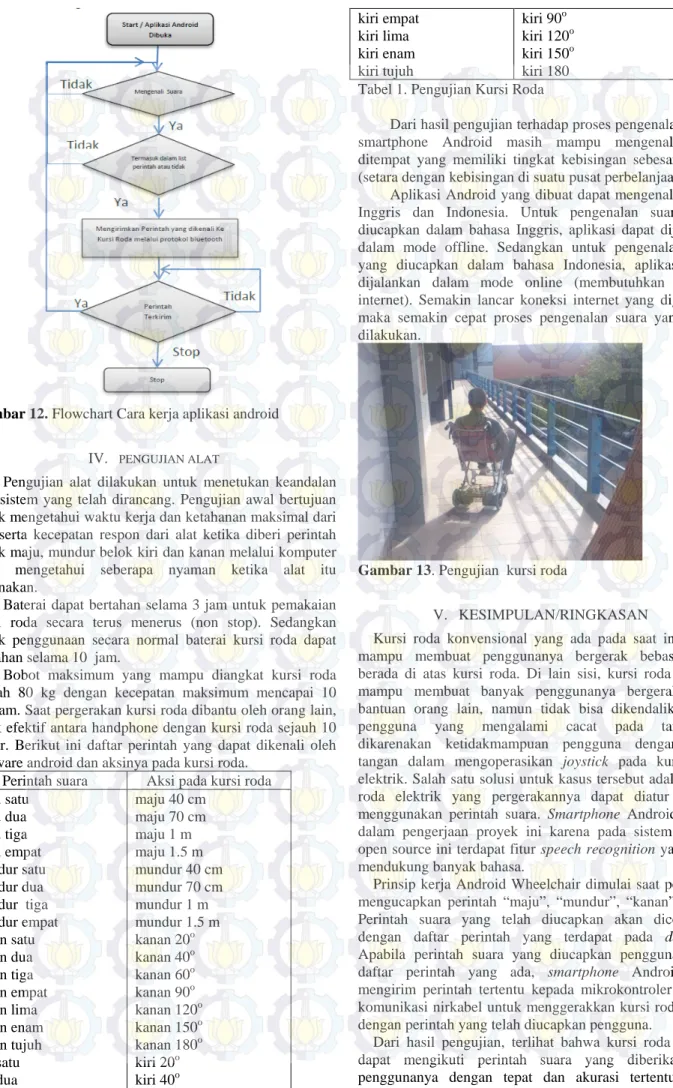
Gambar 10. Blok diagram prinsip kerja sistem
Electric Wheelchair merupakan sebuah kursi roda
yang dimodifikasi sedemikian rupa sehingga dapat merespon perintah suara yang diberikan pengguna melalui
smartphone Android. Untuk menggunakan electric
wheelchairs eorang penguna wajib memiliki smartphone
Android dan memasang aplikasi Android yang telah dirancang sebelumnya yang digunakan untuk mengatur pergerakan kursi roda melalui perintah suara. Untuk memulai menggunakan electric wheelchair, seorang pengguna harus menjalan aplikasi Android “Smart Wheelchair” pada smartphone-nyadan memasangkan (pairing) bluetooth dari smartphone Androidnya dengan modul bluetooth HC05 yang terdapat pada kursi roda. Selanjutnya pengguna dapat memberikan perintah suara “maju”, “mundur”, “kiri” dan “kanan” untuk menggerakkan kursi roda. Selain mengucapkan arah, pengguna kursi roda juga harus mengucapkan angka yang menunjukkan seberapa jauh kursi roda bergerak. Semakin tinggi angka yang diucapkan maka semakin jauh jarak tempuh dari kursi roda itu. Fitur ini ditambahkan untuk menambah keleluasaan gerak pengguna kursi roda.
Gambar11. Tampilan aplikasi Wheelchair Controller di
Gambar 12. Flowchart Cara kerja aplikasi android
IV. PENGUJIAN ALAT
Pengujian alat dilakukan untuk menetukan keandalan dari sistem yang telah dirancang. Pengujian awal bertujuan untuk mengetahui waktu kerja dan ketahanan maksimal dari alat serta kecepatan respon dari alat ketika diberi perintah untuk maju, mundur belok kiri dan kanan melalui komputer serta mengetahui seberapa nyaman ketika alat itu digunakan.
Baterai dapat bertahan selama 3 jam untuk pemakaian kursi roda secara terus menerus (non stop). Sedangkan untuk penggunaan secara normal baterai kursi roda dapat bertahan selama 10 jam.
Bobot maksimum yang mampu diangkat kursi roda adalah 80 kg dengan kecepatan maksimum mencapai 10 km/jam. Saat pergerakan kursi roda dibantu oleh orang lain, jarak efektif antara handphone dengan kursi roda sejauh 10 meter. Berikut ini daftar perintah yang dapat dikenali oleh software android dan aksinya pada kursi roda.
Perintah suara Aksi pada kursi roda maju satu maju dua maju tiga maju empat mundur satu mundur dua mundur tiga mundur empat kanan satu kanan dua kanan tiga kanan empat kanan lima kanan enam kanan tujuh kiri satu kiri dua kiri tiga maju 40 cm maju 70 cm maju 1 m maju 1.5 m mundur 40 cm mundur 70 cm mundur 1 m mundur 1.5 m kanan 20o kanan 40o kanan 60o kanan 90o kanan 120o kanan 150o kanan 180o kiri 20o kiri 40o kiri 60o kiri empat kiri lima kiri enam kiri tujuh kiri 90o kiri 120o kiri 150o kiri 180 Tabel 1. Pengujian Kursi Roda
Dari hasil pengujian terhadap proses pengenalan suara, smartphone Android masih mampu mengenali suara ditempat yang memiliki tingkat kebisingan sebesar 80 dB (setara dengan kebisingan di suatu pusat perbelanjaan).
Aplikasi Android yang dibuat dapat mengenali bahasa Inggris dan Indonesia. Untuk pengenalan suara yang diucapkan dalam bahasa Inggris, aplikasi dapat dijalankan dalam mode offline. Sedangkan untuk pengenalan suara yang diucapkan dalam bahasa Indonesia, aplikasi harus dijalankan dalam mode online (membutuhkan koneksi internet). Semakin lancar koneksi internet yang digunakan maka semakin cepat proses pengenalan suara yang dapat dilakukan.
Gambar 13. Pengujian kursi roda
V. KESIMPULAN/RINGKASAN
Kursi roda konvensional yang ada pada saat ini belum mampu membuat penggunanya bergerak bebas ketika berada di atas kursi roda. Di lain sisi, kursi roda elektrik mampu membuat banyak penggunanya bergerak tanpa bantuan orang lain, namun tidak bisa dikendalikan oleh pengguna yang mengalami cacat pada tangannya dikarenakan ketidakmampuan pengguna dengan cacat tangan dalam mengoperasikan joystick pada kursi roda elektrik. Salah satu solusi untuk kasus tersebut adalah kursi roda elektrik yang pergerakannya dapat diatur dengan menggunakan perintah suara. Smartphone Android dipilih dalam pengerjaan proyek ini karena pada sistem operasi open source ini terdapat fitur speech recognition yang telah mendukung banyak bahasa.
Prinsip kerja Android Wheelchair dimulai saat pengguna mengucapkan perintah “maju”, “mundur”, “kanan”, “kiri”. Perintah suara yang telah diucapkan akan dicocokkan dengan daftar perintah yang terdapat pada database. Apabila perintah suara yang diucapkan pengguna cocok daftar perintah yang ada, smartphone Android akan mengirim perintah tertentu kepada mikrokontroler melalui komunikasi nirkabel untuk menggerakkan kursi roda sesuai dengan perintah yang telah diucapkan pengguna.
Dari hasil pengujian, terlihat bahwa kursi roda elektrik dapat mengikuti perintah suara yang diberikan oleh penggunanya dengan tepat dan akurasi tertentu sesuai dengan program yang telah dipasang di dalam android.Hasil
percobaan menunjukkan dari enam kali perintah suara yang diberikan, keenam perintah suara tersebut mampu dikenali oleh smartphone Android dan kursi roda mampu bergerak sesuai dengan arah yang diucapkan pengguna. Kursi roda ini dilengkapi dengan sensor ultrasonik untuk mengetahui kondisi lingkungan sekitarnya untuk menghindari tabrakan dengan benda yang ada disekelilingnya. Selain itu juga diperlukan rem mekanik yang dapat digunakan pada saat kondisi darurat.
Saran yang diberikan guna peningkatan mutu dan pengembangan alat tugas akhir ini ke depannya adalah:
1. Agar kedepannya kursi roda elektrik ini dapat semakin ditingkatkan ke segi penampilan fisiknya sehingga berdaya jual dan dapat dijual ke pasaran 2. Pada pergerakan kursi roda sedikit lebih diperhalus
sehingga tidak membuat pengguna kehilangan control saat menggunakan kursi roda elektrik. 3. Lebih ditingkatkan lagi filter dalam penyaringan
suara, apabila terdapat noise maka kursi roda akan tetap bisa dikontrol sehingga tidak tergantung pada situasi dan kondisi keramaian di sekitar penggunanya.
UCAPAN TERIMA KASIH
Penulis mengucapkan terima kasih kepada Tuhan Yang Maha Esa atas berkah dan kemudahan yang diberikan untuk menyelesaikan Tugas Akhir ini, kepada Bapak Pujiono, ST.,MT.dan Bapak Ir. Tasripan,MT. selaku dosen pembimbing, teman-teman Laboratorium B-202 yang telah memberikan semangat, motivasi, dan ilmu kepada penulis, serta kepada Bp. Budhy, Ibu. Ester selaku orang tua,seluruh keluarga dari penulis atas kebijaksanaan dan kasih sayang karena telah mendidik penulis.
DAFTAR PUSTAKA
[1] Kursi roda, <URL : http://www.sie-me.com/2013/03/kursi-roda/>, Oktober 2013
[2] Kursi roda olahraga, <URL: http://indonesian.medical-rehab-equipment.com/china
aluminum_frame_speed_king_racing_sports_wheel_chair_f or_old_people_or_disabled_people-396681.html>
[3] Kursi Roda Travelling, <URL:
http://homecare.griyakami.com/2012/04/13/kursi-roda-travel/> ,Oktober 2013
[4] Kursi Roda Elektrik, <URL: http://alatkesehatan-online.com/index.php?main_page=product_info&cPath=40 &products_id=15> Oktober 2013
[5] H-bridge motor driver <URL:
http://www.precisionmicrodrives.com/application-notes- technical-guides/application-bulletins/ab-002-discrete-h- bridge-circuit-for-enhanced-vibration-motor-control-haptic-feedback>
[6] Mikrokontroller AT Mega 16 <URL: http://satyastechplatform.blogspot.com/2012/08/atmega16-microcontroller.html>
[7] Dasar Teori Mikrokontroller AT Mega 32, <URL:
http://fmpunya.blogspot.com/2012/06/dasar-teori-mikrokontroller-atmega-32.html> Oktober 2013
[8] Konfigurasi pin AT Mega
16,<URL:http://www.geyosoft.com/2012/konfigurasi-pin-atmega-16>
[9]Pulse Width Modullation”PWM”,<URL: http://ini- robot.blogspot.com/2012/05/pulse-width-modulation-pwm.html>
[10]Sensor Ultrasonik” SRF 04”,<URL: http://bamzelka.blogspot.com/2013/06/mengakses-sensor-ultrasonik-srf05.html>
[11] Sensor Ultrasonik, <URL: http://www.robot-electronics.co.uk/htm/srf04tech.htm>
[12] Android arduino<URL:
http://infogadgetbaru.com/review-kelebihan-kekurangan-smartfren-andromax-v-spesifikasi-tangguh.html>
[13]Pemrograman Mikrokontroller,<URL:Barret, Steven. 2007. Atmel AVR Microcontroller Primer: Programming
and Interfacing. Bandung : Informatika Bandung>.
[14] Cook, David. (2002). Intermediate Robot Building. New York : Apress.
[15] Milette, Greg. Stroud, Adam.(2012). Professional Android Sensor Programming. Canada : John Wiley & Sons).
[16] Independent Individual, 2011. Speech Recognition
Pada Bidang Medis.
http://roseshit.blogspot.com/2011/11/speech-recognition-pada-bidang-medis.html
![Gambar 1. Kursi roda manual[1]](https://thumb-ap.123doks.com/thumbv2/123dok/4297017.3152163/2.893.125.783.74.1177/gambar-kursi-roda-manual.webp)
![Gambar 7. Konfigurasi Pin AT Mega 16[8]](https://thumb-ap.123doks.com/thumbv2/123dok/4297017.3152163/3.893.125.770.94.1158/gambar-konfigurasi-pin-at-mega.webp)