Pengendalian Kecepatan Motor DC Menggunakan Perintah Suara Berbasis
Mikrokontroler Arduino
Radi Birdayansyah¹, Noer Sudjarwanto², Osea Zebua³ Jurusan Teknik Elektro Fakultas Teknik Universitas Lampung Jalan Prof. Sumantri Brojonegoro No.1 Bandar Lampung 35145
¹[email protected] ²[email protected]
Intisari—Kemajuan teknologi masa kini berkembang sangat pesatdan dibuktikan dengan banyaknya inovasi yang telah diciptakan. Salah satu teknologi yang dapat memberikan kemudahan bagi pemakainya yaitu teknologi dengan fitur pengenalan suara atau voice recognition. Suara yang diucapkan direkam ke dalam database dan sistem hanya mengenal suara yang sudah direkam ke database tersebut.Fitur sistem pengenalan suara ini dapat digunakan untuk berbagai-bagai kebutuhan, seperti keamanan dan pengendalian peralatan. Fitur ini juga dapat digunakan untuk mengatur kecepatan motor dc.Suara dapat dikonversi menjadi data digital dan dapat digunakan oleh mikrokontroler untuk merubah nilai tegangan masukan bagi motor dc dengan menggunakan metode PWM (pulse width modulation)sekaligus mengatur kecepatan motor dc tersebut. Penelitian tugas akhir ini bertujuan merancang dan membuat suatu peralatan untuk mengendalikan kecepatan putaran motor dc dengan perintah suara. Disain peralatan menggunakan sensor easy voice recognitionsebagai alat pengkonversi suara menjadi data digital, mikrokontroler Arduino sebagai pengendali utama dan motor dc.Kata-kata yang diucapkan didisain dan diprogram untuk mengatur kecepatan putaran sesuai yang diinginkan. Tegangan masukan untuk mengatur kecepatan motor dc diatur oleh mikrokontroler dengan menggunakan metode PWM. Hasil penelitian yang diperoleh menunjukkan bahwa peralatan yang dibuat mampu bekerja dengan baik. Pengucapan setiap kata yang telah didesain untuk masing-masing kecepatan motor dc 900 rpm, 1050 rpm, 1100 rpm, dan 1150 rpmmampu menghasilkan kecepatan putaran sebesar 900,2 rpm, 1050,5 rpm, 1101,7 rpm, dan 1152,94 rpm.
Kata kunci—pengaturan kecepatan, motor DC, mikrokontroler, perintah suara, sensor voice recognition
Abstract— Advances in technology to day are growing very rapidly and is evidenced by the many innovations that have been created. One of the technologies that can make it easy for the users is technology with voice recognition features. Spoken voice recorded into the database and the system only recognizes the recorded voice into the database. Features voice recognition system can be usedforvariousneeds, such as security and control equipment. This feature can also be used to control the speed ofa dc motor. Sound can be converted into digital data and can be used by the microcontroller to change the value of the input voltage to the dc motor using PWM(pulse width modulation) as well as control the speed of the dc motor. This research aims to design and create an apparatus for controlling the speed of dc motor using voice commands. The design ofthe equipment uses voice recognition sensor as a means converting sound into digital data, Arduino microcontroller as the main controller and dc motors. The words were spoken designed and programmed to adjust therotation speed as desired. Voltage input to control the speed of a dc motor is regulated by the microcontroller by using PWM method. The results obtained indicate that the appliances are made to work well. Pronunciation of words that have been designed for dc motor speed control of 900 rpm, 1050 rpm, 1100 rpm, and 1150 rpm are capable of producing a rotation speed of 900,2 rpm, 1050,5 rpm, 1101,7 rpm, and 1152,94 rpm.
I. PENDAHULUAN
A. Latar Belakang
Kemajuan teknologi dan ilmu pengetahuan saat ini berkembang sangat pesat, ini terbukti dengan banyak inovasi–inovasi terbaru yang telah diciptakan. Di zaman modern ini teknologi dibuat agar mempermudah bagi penggunanya. Salah satu bentuk teknologi yang cukup memberikan suatu kemudahan bagi pemakainya adalah teknologi dengan fitur pengenalan suara atau voice recognition. Teknologi ini yaitu dengan cara mengucapkan kata yang diinginkan seperti mencocokkan suara yang diucapkan ke database pada sistemnya. Suara dengan kata-kata yang telah diucapkan dapat diprogram, dan kemudian dapat digunakan untuk berbagai-bagai keperluan seperti untuk keamanan sistem dan pengendalian suatu peralatan. Pengendalian kecepatan motor dcjuga dimungkinkan dapat dilakukan dengan menggunakan teknologi dengan fitur ini. Motor dc banyak sekali digunakan seperti di bidang transportasi contohnya pada mobil listrik, di industri maupun pada peralatan rumah tangga. Banyaknya penggunaan motor dc ini, semakin menimbulkan pemikiran untuk memudahkan pengoperasian motor dc tersebut.
Dan dilihat dari segi lain perlu juga memikirkan bagaimana peralatan yang dibuat dapat dioperasikan lebih efisien untuk pengguna dan dengan pengerjaan yang lebih sederhana. Dengan mengguanakan sensor
voice recognition, perintah untuk mengatur
kecepatan motor dc dapat dengan mudah dilakukan hanya dengan menggunakan suara dari jarak jauh.
Berdasarkan hal-hal tersebut diatas, maka muncul sebuah pemikiran untuk membuat sebuah peralatan pengaturan kecepatan motor dc dengan perintah suara berbasis mikrokontrolerArduino.
II. TINJAUAN PUSTAKA
A. Pemograman Arduino
Arduino adalah pengendali mikro
single-board yang bersifat open-source, yang di
turunkan dari wiring platform, yang di rancang untuk memudahkan penggunaan elektronik dalam berbagai bidang.Hardwernya memiliki prosesor atmel AVR dan softwarenya memiliki bahasa pemrograman sendiriseperti di gambar 1.
Gbr. 1 Arduino Uno
B. Sensor Easy Voice Recognition
EasyVR merupakan module voice recognition multi-fungsi seperti ditunjukkan
gambar 2.Dapat digunakan pada banyak aplikasi pengontrolan yang membutuhkan pendeteksian bukan hanya suara melainkan percakapan.Modul ini dapat digunakan atau dihubungkan dengan board mikrokontroler Arduino.
Gbr. 2 SensorEasy Voice Recognition
C. Motor DC
Motor listrik merupakan perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik. Motor dc atau sering
disebut motor arus searah yang ditunjukkan gambar 3, lebih sering digunakan untuk keperluan yang membutuhkan pengaturan kecepatan dibandingkan dengan motor ac. Alasan utama penggunaan motor dc terutama pada industri-industri modern adalah karena kecepatan kerja motor-motor dc mudah diatur dalam suatu rentang kecepatan yang luas, di samping banyaknya metode-metode pengaturan kecepatan yang dapat digunakan.
Gbr. 3 Motor DC
D. Driver Motor
Di pengendalian ini perlu menggunakan mosfet, dimana mosfet yang digunakan yaitu IRFP460 seperti ditunjukkan gambar 4.Metal
Oxide Semiconductor FET atau MOSFET,
memiliki sebuah sumber, gerbang dan saluran. Fungsinya adalah untuk menaikkan tegangan atau menurunkan tegangan dan digunakan pada rangkaian power supply jenis switching untuk menghasilkan tegangan tinggi agar memproses trafo.
Gbr. 4 Mosfet
E. Pulse Width Modulation
Pulse Width Modulation (pwm) atau
modulasi lebar pulsa, adalah teknik pengubahan sinyal digital berupa gelombang kotak (square wave) dimana duty cycle dari gelombang kotak tersebut dapat diatur sesuai dengan kebutuhan sistem. Gelombang kotak
f(t) yang ideal dengan periode T ditunjukkan seperti pada Gambar 5.
Gbr. 5 Gelombang kotak f (t) yang ideal dengan periode T
III. METODE PENELITIAN
A. Prosedur Penelitian
Dalam menyelesaikan tugas akhir ini, prosedur penelitian yang digunakan memiliki 4 tahapan penelitian yaitu:
1) Pengumpulan referensi dan data 2) Perancangan peralatan
a. Penentuan komponen b. Perancangan Hardware c. Perancangan Software 3) Pengujian Alat
a. Pengujian Pengenalan Suara b. Pengujian Arduino
c. Pengujian Kontrol Motor DC 4) Analisa dan Perhitungan
B. Analisa Sistem
Analisis sistem dapat didefinisikan sebagai penguraian suatu sistem yang utuh kedalam bagian-bagian komponennya dengan maksud untuk mengidentifikasi dan mengevaluasi permasalahan-permasalahan, hambatan yang terjadi dan kebutuhan-kebutuhan yang diharapkan sehingga dapat diusulkan perbaikan-perbaikannya.
Dalam penelitian kali ini analisa sistem yang dilakukan terdiri dari tahap-tahap berikut ini :
1) Deskripsi umum sistem
Untuk melakukan pemrosesan suara ini, akanmenggunakan sistem berbasis sensor easy
pemrosesan perintah suara tersebut. Sistem ini akan mengakses database sensor easy voice
recognition untuk melakukan pencocokan
suara. Setelah melakukan pencocokan suara, hasil dari pencocokan suara ini akan dikirimkan oleh sensor easy voice recognition. Selanjutnya arduinoakan menerima perintah tersebut dan memproses sesuai perintah yang telah diprogram ke dalam arduino. Dari perintah yang diterima itu arduinoakan mengeluarkan frekuensi sinyal PWM untuk mengontrol pensaklaran MOSFET dari driver motor. Pada driver motor dc tersebut akan memutar motor dc sesuai perintah arduino.
Deskripsi sistem secara umum dapat dilihat pada diagram gambar 6 berikut ini :
Gbr. 6 Diagram Perancangan Alat
2) Analisa Sistem Sensor easy voice recognition
Aplikasi yang dirancang adalah sebuah sensor easy voice recognition. Dimana dengan menggunakan sensor ini akan dapat melakukan perintah dengan mengucapkan kata. Selain itu juga sensor ini dirancang untuk terhubung dengan sistem arduino.. Sehingga perintah yang diucapkan akan dikirimkan ke sensor yang selanjutnya akan di proses oleh arduino.Flowchart dari aplikasi android ini dapat dilihat dari gambar 7.
Gbr. 7 Flowchart Aplikasi
3) Analisa rangkaian kendali putaran motor Rangkaian kendali putaran motor ini menggabungkan rangkaian driver motor
dcdengan motor dc tersebut. Dimana
rangkaian driver motor dc ini berfungsi sebagai pembesar tegangan dikarenakan di arduino hanya bisa menyalurkan tegangan 5 volt. Dan dengan driver motor dc ini maka tegangan yang ingin diberikan untuk putaran motor dc ini akan semakin besar. Untuk itu driver motor ini sangat diperlukan untuk disambungkan ke arduino.
IV. PEMBAHASAN
A. Pelaksanaan Perangkat Keras Dan
Pengujian
1) Spesifikasi Perangkat Keras
Pada tugas akhir Pengendalian Kecepatan Motor DC Menggunakan Perintah Suara Berbasis Mikrokontroler ArduinoPada Mobil Listrik ini memiliki spesifikasi sebagai berikut:
Nama : Pengendalian Kecepatan Motor DC Menggunakan
Perintah Suara Berbasis Mikrokontroler Arduino Tegangan : 50 Volt
Arus maks : 1 Ampere
Pengendali : Mikrokontroler ATmega 328P
Software : Arduino
Sensor jarak : SensorEasy Voice
Recognition
Driver motor : IC ORPC-817 , IRF 496 Beban : Motor dc
Hasil dari penelitian tugas akhir ini berupa alat Pengendalian Kecepatan Motor DC Menggunakan Perintah Suara Berbasis Mikrokontroler ArduinoPada Mobil Listrik dengan perangkat keras yang ditunjukan sebagai berikut :
2) Motor Direct Current (DC)
Pada tugas akhir ini digunakan motor dc sebagai media pembanding dengan motor yang digunakan sebagai mesin penggerak di mobil listrik, dimana motor dc yang digunakan telah dikalibrasi dengan salah satu motor yang digunakan pada mobil listrik, Berikut spesifikasi motor dc yang digunakan pada penelitian ini :
Nominal voltage : 220 Volt dc Nominal current : 1 Ampere
Exciter voltage : 220 Volt dc
Exciter current : 100 mA
Nominal speed : 2000 rpm
Nominal power : 0.2 kWatt
Dimensi : 340 x 210 x 210 mm (WxHxD)
Tahanan Rotor : 11.63 Ohm Tahanan stator : 2.22 Ohm
Berikut gambar motor dc yang digunakan :
Gbr. 8 Motor Direct Current
3) Sensor Suara ( Easy Voice Recognition )
Gbr. 9 Sensor Suara ( Easy Voice Recognition ) Sensor suara yang digunakan pada penelitian ini adalah sensor easy voice
recognition dengan menggunakan 2 pin
komunikasi dimana menggunakan pin 12 untuk transmit dan pin 13 untuk receive. Prinsip kerja sensor easy voice recognition yaitu saat receive menerima suara melalui
microphone, maka sinyal suara akan diterima
oleh data receive, lalu data tersebut akan dikirim melalui transmit, jika sinyal suaranya cocok dengan yang telah ditentukan maka perintah tersebut akan menyesuaikan program yang telah ditentukan, jika tidak maka sensor tersebut akan menyatakan error di programnya.
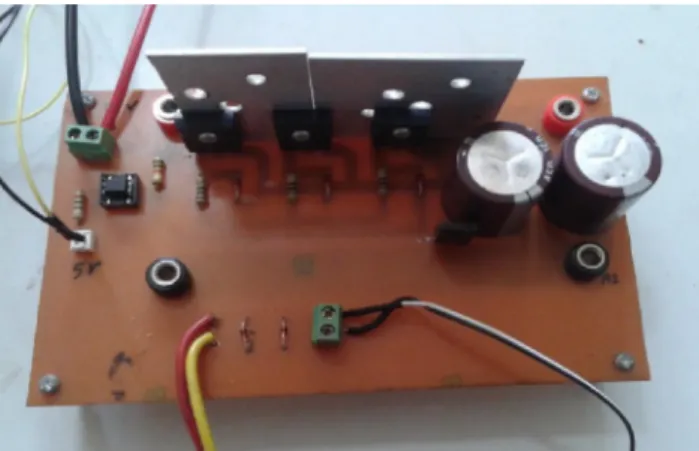
4) Driver Motor
Driver motor yang digunakan pada penelitian
ini adalah driver motor yang menggunakanIc ORPC-817 dan terdapat beberapa komponen lainnya, seperti dioda, resistor dan kapasitor, serta IRF 496.
Gbr. 10 Rangkaian Driver Motor
Driver motor jenis ini dapat menahan
tegangan sampai 500 volt dan juga dapat dialiri arus sampai 18 Ampere, sehingga
driver motor ini sangat kuat untuk menahan
tegangan dan arus yang besar, gambar driver motor dapat dilihat pada gambar 10.
5) Rangkaian Mikrokontroller Arduino
Gbr. 11 Mikrokontroler Arduino
Pada tugas akhir pengaturan kecepatan motor dc dengan sensor suara menggunakan mikrokontroler Arduino. Dimana di dalam mikrokontroler tersebut terdapat atmega 328P dan juga terdapat komponen kompone dasar yang dibutuhkan serta terdapat pin yang telah disediakan.
B. Pengujian Perangkat Keras
1) Pengujian Sensor Suara
Pengujian Pengendalian kecepatan motor DC dengan perintah suara berbasis mikrokontroler arduino pada mobil listrik dilakukan dalam kondisi ideal dan tidak ideal.Pengujian dalam kondisi ideal dilakukan pada kondisi ruangan yang hampir tidak memiliki derau. Pengujian dengan kondisi tidak ideal meliputi yaitu pengujian dengan kondisi ruang pengujian yang berderau, derau yang digunakan dalam pengujian ini dihasilkan suara kendaraan yang lalu lalang di sekitar kampus dan pemutaran musik.
Tabel 1 Tabel Pengujian Dengan Kondisi Lingkungan Ideal Kata – Kata Masukan Jumlah Pengujian Keberhasi lan Satu 10 90% Dua 10 80% Tiga 10 90% Empat 10 90%
Tabel 2 Tabel Pengujian Dengan Kondisi Lingkungan Tidak Ideal Kata – Kata Masukan Jumlah Pengujian Keberhasi lan Satu 10 40% Dua 10 30% Tiga 10 40% Empat 10 40%
Dapat dilihat pada tabel 1 dan 2 terdapat perbedaan yang signifikan ketikan lingkungan tanpa derau hampir 90% pengucapan yang benar, tetapi ketika lingkungan berderau mengalami penurunan pengucapan dibandingkan dengan kodisi ideal.
Untuk menghitung peresentase keberhasilan digunakan persamaan :
2) Pengujian Perangkat Keras secara Keseluruhan
Tujuan dari pengujian ini adalah untuk mengetahui apakah alat pengaturan kecepatan motor DC dengan menggunakan sensor suara berbasis mikrokontroler bekerja baik dan benar.
Gambar 12 menunjukkan rangkaian keseluruhan alat pengaturan kecepatan motor DC dengan menggunakan sensor suara berbasis mikrokontroler.
Gbr. 12 Gambar Keseluruhan
Pada penelitian ini menggunakan nilai pwm yang sudah ditentukan pada motor dc yang dihubung berpenguatan bebas, sehingga akan menghasilkan nilai tegangan, arus, dan kecepatan sebagai berikut :
Tabel 3 Data Hasil Hubungan pwm, Tegangan, Arus, dan Kecepatan
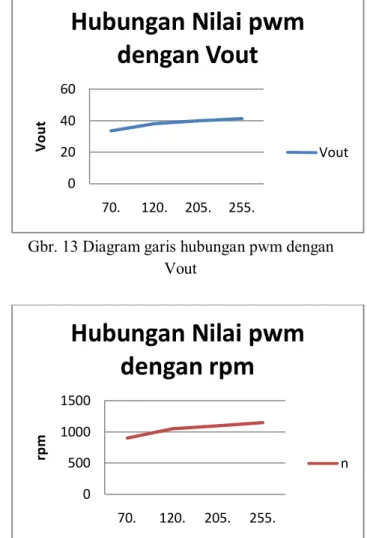
Berikut bentuk diagram garis hubungan pwm dengan Vout dan rpm dari data tabel 3 :
Gbr. 13 Diagram garis hubungan pwm dengan Vout
Gbr. 14 Diagram garis hubungan pwm dengan rpm Dari data diatas dapat disimpulkan ketika nilai pwm semakin besar maka nilai Vout pun juga akan semakin besar, begitu pun pada nilai kecepatannya. Data tersebut sesuai dengan rumus : n =
.
Untuk dapat melihat kebenaran datanya maka dibuatlah perhitungan sebagai berikut : Diambil perhitungan dari pwm padamikrokontroler arduino
Pada data pwm = 70
Duty Cycle = x 100%
= 27 % = 0,27 V
Dapat dilihat dari perhitungan dari pwm pada mikrokontroler arduino dengan saat di osiloskop tidak jauh berbeda, pada saat pwm =
0 20 40 60 70. 120. 205. 255. Vo ut
Hubungan Nilai pwm
dengan Vout
Vout 0 500 1000 1500 70. 120. 205. 255. rp mHubungan Nilai pwm
dengan rpm
n70 maka di perhitungan Vout = 1,35 V dan saat di osiloskop yaitu Vout = 1,52 V, begitu juga pada nilai pwm lainnya. Jadi data
perhitungan dan osiloskop pun tidak jauh berbeda begitu pun pada nilai pwm lainnya.
Gbr. 15 Gambar secara keseluruhan Pertama-tama kata yang diucapkan akan
menjadi data serial ke tx dan rx di sensor easy
vr. Lalu dari data serial di easy vr tersebut
akan dimasukkan pada arduino melalui pin 12 dan pin 13 yang nantinya akan diproses oleh arduino. Setiap data serial yang disimpan di arduino akan diprogram lagi agar menghasilkan PWM yang diinginkan setiap kata yang diucapkan.PWM inilah yang nantinya akan mentriger mosfet pada driver motor melalui ic optocoupler. Pada dasarnya prinsip kerja ic optocoupler saat tegangan yang dikirimkan ke arduino di high, ic akan mengirim cahaya ke poto transistor maka resistansi yang dihasilkan akan rendah sehingga tegangan yang dihasilkan pun semakin rendah, begitu pun sebaliknya saat tegangan yang dikirimkan ke arduino di low, ic akan mengirim cahaya yang redup ke poto transistor maka resistansi yang dihasilkan akan tinggi sehingga tegangan yang dihasilkan pun semakin tinggi, dan juga digunakan resistor (R4) di tegangan masukan
pada ic yaitu 15 volt, resistor tersebut digunakan sebagai pembagi tegangan di keluaran ic optocoupler. Dapat dilihat dari perhitungan saat high dan low di ic optocoupler : Terang (pwm high) Output =
=
.
15 V = 1,36 V Gelap (pwm low) Output = =.
15 V = 7,5 VDapat dilihat perhitungan pengaturan saat di ic optocoupler mendapatkan tegangan high dari arduino maka tegangan yang dihasilkan akan kecilkarena resistansi yang dihasilkan kecil, begitu pun sebaliknya pada saat tegangan low dari arduino maka tegangannya akan besar karena resistansi yang dihasilkan
besar. Lalu setelah tegangan dikirim dari ic optocoupler maka tegangan tersebut akan dikirim ke mosfet sebagai gatenya, dan terdapat resistor (R1,R2,R3) yang dipasang seri pada mosfet, resistor disini digunakan untuk pembatas arus, karna arus maksimal gate di mosfet sebesar 2A, untuk itu digunakanlah resistor sebagai pembatas arus di mosfet, dapat dilihat di perhitungan saat diberi tegangan 15 V dari ic maka diperlukan resistor sebesar R = = = 7,5 Ω, jadi diperlukanlah resistor sebesar 7,5 Ω atau lebih sehingga resistor disini minimal yang digunakan adalah 7,5 Ω dan resistor yang dipakai di driver ini yaitu 10 Ω. Mosfet ini pun diseri kan juga dengan dioda zener (D4, D5, dan D6), fungsi dioda zener disini untuk memotong tegangan lebih, jadi saat tegangan yang dikirim dari ic sebesar 15 volt maka hanya tegangan tersebut yang boleh dilewati karna dioda zener yang dipakai disini sebagai pembatas tegangan 15 volt, jadi jika tegangan melebihi dari 15 volt maka tegangan akan dipotong karna itulah fungsi dioda zener. Setelah itu tegangan 15 volt tersebut akan dikirim ke mosfet sebagai gate nya, yang sebelumnya mosfet telah dihubungkan tegangan 50 volt pada drain dan source nya. Tegangan yang sudah diatur di gate pada mosfet akan dikirim ke motor dc, tetapi terdapat dioda (D3) untuk memotong tegangan balik jika saat mosfet diatur untuk berhenti, dioda ini sangat dipeerlukan karena jika tidak ada maka tegangan balik tersebut akan merusak mosfet. Kemudian tegangan tersebut akan mengalir ke kapasitor (C1, C2), kapasitor disini untuk memperbagus rifle pada gelombang, jadi gelombang akan semakin bagus dengan adanya kapasitor, digunakan 2 kapasitor disini untuk semakin mendapatkan rifle yang kecil karna kapasitor dipasang secara paralel maka nilai kapasitansi nya semakin besar, dimana satu kapasitor nya 150 uf, sehingga jika ada 2 kapasitor maka menghasilkan nilai 300 uf dan dapat menahan tegangan 200 volt. Lalu tegangan tersebut
dikirim ke motor dc sesuai tegangan dari ic yang dikirimkan ke gate mosfet, sehingga terjadi tegangan spike dan motor pun dapat berputar sesuai dengan tegangan yang dikirim. Semakin besar PWM maka motor pun akan semakin cepat, begitupun sebaliknya.
Jadi dari driver motor dc dapat dicari nilai kecepatannya saat kita mengucapkan kata yang telah ditentukan, sehingga perhitungan ketika saat mengucapkan kata satu atau ketika diberi pwm = 70 sebagai berikut :
Ea = Vt – Ia.Ra Ea = 33,47 – 0,14 . 14 = 31,51 c = = , = 0,035 n = . = , , . , = , , = 900,2 rpm
Di perhitungan bahwa ketika nilai pwm = 70 maka akan mendapatkan nilai kecepatan / n = 844,2 rpm Dari data tersebut terdapat perbedaan yang tidak banyak, itu disebabkan juga adanya tegangan drop dan rugi – rugi pada kabel, maka terdapat hasil sekian. Begitu pun pada yang lainnya, perbedaan hasil perhitungan dan percobaan tidak mengalami perbedaan yang besar.Untuk melihat perhitungan yang lainnya maka dapat dilihat di lampiran.
Lalu didapatkan juga data dari osiloskop pada keluaran mikrokontroler arduino, masukan drivermotor, serta keluaran driver motor. Berikut hasil yang didapat :
a) Data osiloskop dari keluaran mikrokontroler arduino
Gbr. 16 Keluaran mikrokontroler arduino saat pwm = 70
Gbr. 17 Keluaran mikrokontroler arduino saat pwm = 120
b) Data osiloskop dari masukan driver motor
Gbr. 18 Masukan driver motor saat pwm = 70
Gbr. 19 Masukan driver motor saat pwm = 120
c) Data osiloskop dari keluaran driver motor
Gbr. 20 Keluaran driver motor saat pwm = 70
Gbr. 21 Keluaran driver motor saat pwm = 120
Pada gelombang terdapat keterangan yang dihasilkan dari gelombang tersebut, di saat data osiloskop dari keluaran mikrokontroler arduino pada pwm 70, 120, 205, 255, dan 0. Pada pwm = 70 maka terdapat nilai frekuensi 975,6 Hz, nilai mean menunjukkan tegangan rata - rata saat Ton di gelombang yaitu sebesar 5,44 V, nilai Pk – Pk (peak to peak) yaitu menunjukkan amplitudo dari bawah ke atas yaitu sebesar 5,44 V, nilai minimum menunjukkan tegangan minimum pada Toff sebesar – 80 mV, nilai maksimum menunjukkan tegangan maksimum pada Ton yaitu sebesar 5,36 V, nilai pulse with modulation menunjukkan nilai lebar pulsa yaitu sebesar 285 us, nilai rise time menunjukkan nilai 1 periode yaitu sebesar 1,000 us. Begitu pun pada pwm lainnya hanya saja nilai nya yang berbeda.
C. Perangkat Lunak
Pada tugas akhir ini menggunakan bahasa pemograman arduino dimana di arduino nya sendiri terdapat mikrokonroler 328P. Di program ini lah yang akan mengatur pwm untuk kecepatan motor DC.
Program yang digunakan pada penelitian ini menggunakan bahasa pemograman arduino. Dimana pin 12 dan pin 13 dari mikrokontroler arduino digunakan sebagai masukan dari keluaran sensor easy voice recognition, sedangkan keluaran dari pemograman ini dari pin 5 dan ground yang terhubung dengan kedua driver motor dc. Sedangkan pada pin 10, 9, 7, 4, 3, 2 sebagai output ke LCD.
Program yang pertama yaitu bagaimana harus mencocokkan suara sensor easy voice
recognition melalui michrophone. Di program
ini suara akan disimpan sebagai acuan jika perintah yang dilakukan benar atau tidak.
Dari program sensor suara, program yang kedua adalah program driver motor dc dengan menggunakan sistem Pulse width modulation (pwm).Dengan menggunakan sistem pwm, maka akan dibangun sistem perbandingan antara masukan pulsa ke driver motor dan masukan nilai tegangan yang berasal dari
power supply.Hubungan antara nilai pwm dan
tegangan adalah berbanding lurus.Semakin besar nilai pwm maka nilai tegangan semakin besar.
V. KESIMPULAN DAN SARAN
A. Kesimpulan
Dari serangkaian penelitian, pengujian, dan analisa yang telah dilakukan dapat disimpulkan bahwa:
1) Peralatan pengendalian kecepatan motor DC berbasis mikrokontroler arduino dapat bekerja dengan baik untuk mengendalikan kecepatan motor dc dengan perintah suara.
2) Hasil pengujian menunjukkan bahwa dengan mengucapkan perintah melalui suara, maka kecepatan motor DC dapat diatur sesuai dengan desain kata dan kecepatan putaran motor dc yang diinginkan. Hasil pengujian untuk masing-masing desain kata yang diucapkan untuk masing-masing kecepatan 900 rpm, 1050 rpm, 1100 rpm dan 1150 rpm menghasilkan kecepatan putaran motor dc masing-masing sebesar 900,2 rpm, 1050,5 rpm, 1101,7 rpm, dan 1152,94 rpm.
3) Keadaan lingkungan yang tidak ideal sangat mempengaruhi proses pengenalan suara yang diterima sensor, sehingga pengucapan harus dilakukan secara berulang kali.
4) Pengaturan kecepatan motor dc yang dilakukan hanya dengan merubah besar tegangan masukan ke motor, sehingga mempunyai keterbatasan di dalam pengaturan kecepatan yang melebihi kecepatan nominalnya.
B. Saran
Untuk memberikan masukan dan memudahkan dalam penelitian .berikut merupakan saran-saran yang perlu diperhatikan :
1) Perlu dilakukan penelitian lebih lanjut agar dapat memaksimalkan sensor pengenalan suara di tempat kondisi yang tidak ideal yang biasanya disebabkan suara yang ribut pada lingkungan sekitar. 2) Perlu adanya pengereman mekanik disaat
mobil mengerem agar berhenti di waktu yang tepat.
REFERENSI
[1] Banzi, Massimo. “Gettting Started with Arduino”. O’Reilly. 2008
[2] Arduino, http://www.arduino.cc EasyVR 2.0 [3] http://www.veear.eu/products/easyvr/
[4] Simon Adams, dkk. Ensiklopedia Populer Anak. PT. Ichtiar Baru Van Hoeve, 1998. [5] Sulasno dan Agus Prayitno, Thomas. 2006.
Teknik sistem control-Edisi pertama. Graha ilmu.Yogyakarta.
[6] A.E. Fitzgerald, Kingsley Charles, Umans D Stephen, dan Achyanto Djoko. 1997. Mesin-mesin listrik-edisi keempat. Jakarta. Erlangga
[7] Perbedaan Speech Recognition dan Voice Recognitionhttp://informatika- uho.blogspot.com/2013/12/perbedaan-speech-recognition-dan-voice.html [19 Januari 2015] [8] Datasheet IRF460 http://www.alldatasheet.com/ [20 maret 2013]
[9] Baharuddin, Rhiza S.Sadjad, Tola Muhammad. 2012. Sistem pengendalian kecepatan motor dc berbasis pwm (pulse width modulation). Sulawesi Selatan. Universitas Hasanudin
[10] Prasetyo, Muhammad Eko Budi. 2010. Teori dasar Hidden Markov Model. Makalah II2092 Probabilias dan Statistik – Sem.I Tahun 2010/2011.Program Studi Sistem dan teknologi informasi.Institut Teknologi Bandung. Bandung