BAB 1
PENDAHULUAN
1. 1. Latar BelakangCandi Borobudur adalah salah satu karya besar nenek moyang bangsa Indonesia. Candi Borobudur merupakan candi terbesar di dunia dan sudah ditetapkan sebagai salah satu warisan dunia. Candi Borobudur memerlukan pemeliharaan, perawatan dan upaya pelestarian secara khusus sesuai dengan standar pemeliharaan peninggalan warisan dunia. Salah satu bentuk pemeliharaan candi adalah dengan melakukan pemantauan (monitoring) struktur atau konstruksi bangunan candi. Pemantauan dapat dilakukan terhadap adanya kemungkinan penurunan (settlement) candi akibat beban yang ada. Salah satunya dilakukan dengan pengamatan menggunakan sipat datar pada jaring pantau vertikal candi.
Pemantauan pergeseran vertikal sudah lama dilakukan sejak selesainya pemugaran candi tahun 1982. Pemantauan terus dilakukan dari tahun ke tahun dengan berbagai kendala, antara lain terjadi perubahan titik pada tahun 1991 akibat terlindas buldozer, tahun 1993 perubahan jaring sipat datar untuk memperbaiki konfigurasi dan kehandalannya. Hal ini menyebabkan sebagian data pengukuran tidak menunjuk ke titik-titik pantau yang sama. Bentuk jaring sipat datar tahun 1993 masih mempunyai kelemahan dalam hal distribusi titik pantau yang terlalu rapat. Kekurangan lainnya yaitu dalam hal pelaksanaan pengukuran yang hanya menggunakan sipat datar otomatis dan rambu biasa. Disamping itu cara pengolahan hasil ukuran hanya dengan menggunakan metode perataan sederhana beda tinggi ukuran sipat datar.
Pada tahun 2002 didesain jaring sipat datar baru dengan mempertimbangkan aspek geometrik dan fisik. Kelemahan-kelemahan pada jaring sebelumnya diperbaiki pada jaring baru ini mulai dari geometri jaring, alat ukur yang digunakan, teknik pengamatan hingga pengolahan data (Ma’ruf dan Djawahir, 2004). Pada penelitian ini menganalisis menggunakan jaring tersebut untuk monitoring jaring pantau vertikal. Pengukuran dengan dua alat yang berbeda dan geometri jaring yang berbeda. Pengukuran sipat datar telah dilakukan tahun 2011 dengan menggunakan
alat sipat datar otomatis dan tahun 2012 dengan menggunakan Total Station. Data pengukuran yang telah diolah dapat dilakukan analisis kualitas jaring pantau vertikal. Analisis data yang telah diperoleh ini nantinya bisa digunakan untuk membantu studi deformasi vertikal Candi Borobudur. Analisis yang dilakukan untuk mengetahui perbedaan kualitas jaring dapat ditinjau dari segi alat yang berbeda, cara pengukuran yang berbeda dan bentuk geometri jaring yang berbeda.
1. 2. Rumusan Masalah
Dari latar belakang yang telah dikemukakan maka dihasilkan perumusan masalah yaitu :
1. Berapa posisi estimasi tinggi jaring kerangka pemantau vertikal Candi Borobudur kala pengamatan tahun 2011 dan 2012?
2. Berapa nilai korelasi bentuk masing-masing jaring pada halaman candi berpengaruh terhadap kekuatan geometri jaring?
3. Berapa besar pergeseran vertikal yang terdeteksi berdasarkan hasil estimasi tinggi kala pengamatan tahun 2011 dan 2012?
1. 3. Batasan Masalah
Dalam penelitian ini pembatasan permasalahan yang ada dengan menggunakan kriteria sebagai berikut: dibuat pernyataan yang lenih terukur
1. Data yang digunakan adalah ukuran sipat datar kala pengamatan tahun 2011 dengan waterpass dan tahun2012 dengan Total Station.
2. Hitung kuadrat terkecil menggunakan metode parameter minimum constraint. 3. Analisis kualitas dilakukan dengan melihat nilai simpangan baku.
4. Adanya perbedaan desain jaring antara jaring vertikal sipat datar dan dengan jaring Total Station 2011 dan 2012, maka titik-titik yang digunakan untuk analisis pergeseran adalah titik-titik yang sama terdapat pada masing-masing epok.
1. 4. Tujuan Penelitian
1. Menentukan posisi dan ketelitian vertikal titik-titik pantau pada jaring pemantau vertikal Candi Borobudur tahun 2011 dan tahun 2012.
2. Menentukan kualitas jaring pemantau vertikal dari analisis perhitungan dan kekuatan geometri jaring masing-masing kala pengamatan.
3. Menentukan pergeseran vertikal titik-titk pantau dari kala I dan II untuk keperluan studi deformasi.
I. 5. Tinjauan Pustaka
Lestari dan Widjajanti,(2000) melakukan pemantauan defomasi untuk keperluan pelestarian Candi Borobudur dengan pendekatan Geodetik pada jaring sipat datar yang terletak di kompleks Candi Borobudur. Dari data pengukuran tahun 1990 dan 1999 dilakukan penelitian untuk menentukan besar pergerakan vertikal candi, kecepatan dan percepatan pergerakannya. Proses perhitungan data dilakukan dengan menggunakan perataan kuadarat terkecil metode parameter terpisah masing-masing kala pengamatan untuk mendapatkan titik objek dan pergeseran vertikal. Hasil analisis pergeseran vertikal menunjukkan bahwa titik-titik bergerak pada halaman candi, pada lorong I dan pada lorong IV. Nilai pergeseran vertikal ke bawah terkecil pada titik 3 pada poligon di lorong V = -11,688 mm dan terbesar pada titik 11 pada poligon di lorong IV = -32,406 mm. Nilai pergeseran ke atas terkecil pada titik 26 pada poligon di lorong I = 14,906 mm dan terbesar pada titik 15 pada poligon di lorong IV = 40,594 mm.
Koesumakristi, (2005) melakukan analisis deformasi vertikal berdasarkan pengukuran jaring sipat datar telah dilakukan dengan perataan secara bertahap tiap epok dengan hitung kuadrat terkecil metode parameter. Data yang digunakan adalah pengukuran beda tinggi tahun 2002, 2003 dan 2004. Hasil penelitian ini menunjukkan data yang diukur selama kurun waktu November 2002 hingga November 2003 menunjukkan bahwa candi Borobudur mengalami kenaikan rerata sebesar 2,245 mm. Selama kurun waktu November 2003 hingga November 2004 sisi Timur, Tenggara, Selatan dan Barat daya Candi Borobudur mengalami kenaikan rerata sebesar 0,815 mm sedangkan sisi lainnya relatif stabil. Selama kurun waktu November 2002 hingga November 2004 candi Borobudur secara umum mengalami kenaikan rerata sebesar 2,551 mm.
Nugroho, dkk. (2012) melakukan perhitungan terhadap beberapa titik-titik pantau vertikal tahun 2005 dan 2011. Dari hasil yang terlihat hampir semua titik pantau mengalami pergeseran vertikal. Pergeseran vertikal ini bisa disebabkan karena terjadi pergeseran pada titik-titik pantau yang bersangkutan. Adapun sebab yang lain pergeseran terjadi akibat kesalahan pengukuran. Menurut analisis yang dilakukan ada dua faktor yang menjadi penyebab yaitu faktor manusia dan faktor alat (TOPCON AT – G2 auto level dan Leica Sprinter M-100). Terjadinya pergerakan dari titik-titik objek yang disebabkan oleh aktifitas manusia adalah seperti pengangkatan terhadap batu-batu candi yang merupakan tempat dimana titik-titik tersebut dipasang. Hal ini disebabkan karena terjadinya bencana alam yang menyebabkan kerusakan pada batu-batu Candi Borobudur, sehingga diadakanlah pembersihan pada bangunan candi (misalnya: Peristiwa letusan gunung Merapi pada tahun 2010 yang menyebabkan Candi Borobudur dipenuhi dengan abu vulkanik sehingga perlu dilakukan pembersihan). Faktor alat yaitu penggunaan alat ukur yang berbeda berpengaruh pada hasil pengamatan yang didapat. Pengaruh keduanya jelas terlihat adalah pada tingkat ketelitan dari data pengukuran, hal ini dapat dilihat pada hitung perataan pada masing-masing kala pengamatan yaitu dari hasil matrik V (residu), ketelitian masing-masing titik pantau dan juga pada perbedaan varian aposteorinya yang besar.
Dari beberapa studi di atas perlu dilakukan evaluasi lebih lanjut terhadap jaring pantau pengukuran tahun 2011 dan 2012. Pengukuran dengan alat dan bentuk geometri jaring yang berbeda yang berbeda antara tahun 2011 dan 2012. Untuk itu pada penelitian ini akan dikaji lagi analisis kualitas jaring pantau vertikal ditinjau dari hal tersebut. Dari hasil yang dihasilkan diharapkan membantu dalam menilai kualitas jaring untuk studi pergeseran vertikal.
I.6. Landasan Teori
I. 6. 1. Deformasi vertikal
Pengertian deformasi secara umum yaitu perubahan posisi titik, bentuk dan dimensi suatu benda secara absolut maupun relatif. Perubahan kedudukan titik secara
absolut ditinjau dari perilaku gerakan titik itu sendiri sejak titik tersebut belum bergerak, sedangkan perubahan kedudukan titik secara relatif peninjauan gerakan titik dilihat terhadap titik lainnya. Deformasi dapat terjadi karena adanya gaya yang bekerja dari luar ataupun dari dalam benda tersebut. Sesuai dengan hukum fisika, maka pada benda itu akan timbul efek reaksinya. Respon inilah yang kemudian membuat benda mengalami translasi, rotasi, deformasi linier serta dilatasi (deformasi sudut) atau bisa disebut benda mengalami deformasi.
Dalam kaitannya dengan deformasi vertikal maka fokus utama terhadap respon tersebut adalah pada arah vertikal (Widjajanti, 2001). Perubahan posisi mengacu pada data acuan atau data referensi yang digunakan. Deformasi yang terjadi tidak hanya bergeser secara horizontal, namun dapat terjadi secara vertikal yang biasanya diakibatkan karena penurunan tanah, pergeseran lempeng bumi dan faktor alam yang lainnya. Analisis deformasi memerlukan waktu pemantauan / rentang / kala yang dilakukan secara periodik. Dari hasil pengukuran berulang ini akan didapatkan perbedaan koordinat titik-titik obyek. Dari titik-titik pantau hasil perhitungan dapat dilakukan evaluasi kualitas jaring yang selanjutnya bisa digunakan untuk analisis deformasi. Pemantauan dengan suatu alat yang berbeda dan bentuk geometri jaring yang berbeda dapat menententukan kualitas untuk analisis pergeseran. Salah satu pendekatan untuk analisis ini adalah hitungan yang menerapkan perataan kuadrat terkecil minimal constraint terhadap masing-masing kala pengamatan dan uji pergeseran titik.
I. 6. 2. Pengukuran Sipat Datar
Pengukuran jaring pemantauan deformasi vertikal menggunakan metode sipat datar. Metode sipat datar merupakan metode penentuan beda tinggi yang paling teliti, maka metode ini biasanya dikerjakan untuk menentukan ketinggian titik-titik kerangka dasar pemetaan atau pekerjaan-pekerjaan rekayasa yang membutuhkan ketelitian yang tinggi. Istilah sipat datar di sini berarti konsep penentuan beda tinggi antara dua titik atau lebih dengan garis bidik mendatar atau horizontal yang diarahkan pada rambu-rambu yang berdiri tegak atau vertikal. Sedangkan alat ukurnya disebut penyipat datar atau waterpass.
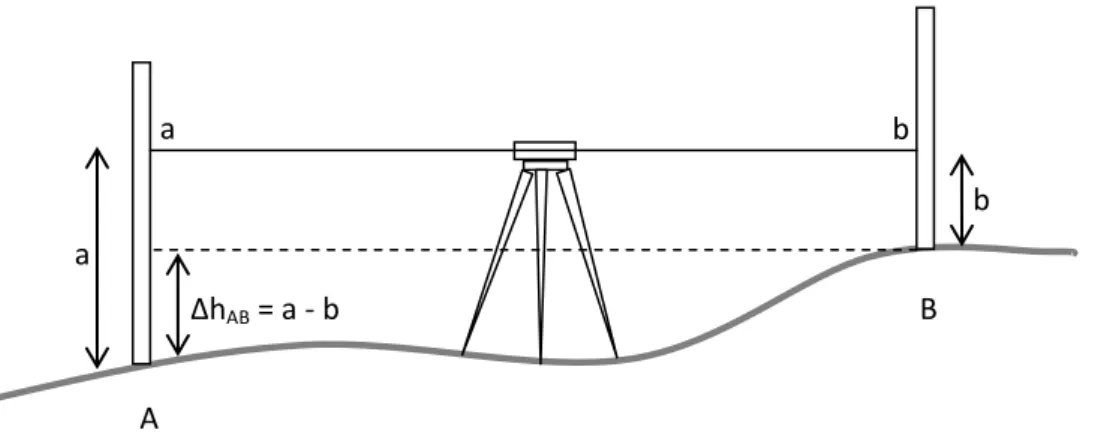
Prinsip pengukuran beda tinggi dengan alat sipat datar adalah menentukan beda tinggi antara dua titik dengan menghitung selisih bacaan benang tengah rambu muka dan rambu belakang yang didirikan pada kedua titik tersebut. Berikut ini gambar prinsip pengukuran sipat datar (Gambar 1. 1).
Keterangan :
A dan B : titik diatas permukaan bumi yang akan diukur beda tingginya
a : bacaan benang tengah rambu di titik A
b : bacaan benang tengah rambu di titik B
ΔhAB : beda tinggi antara titik A dan B
Berdasarkan gambar (I.1) dapat dicari beda tinggi antara titik A dan B dengan persamaan:
ΔhAB = a – b (I.1)
Untuk menentukan tinggi suatu titik dengan sipat datar dibutuhkan setidaknya satu titik lain yang telah diketahui ketinggiannya (titik referensi). Dengan mengasumsikan ketinggian titik A (HA) telah diketahui, maka ketinggian titik B (HB)
dapat dicari dengan persamaan:
HB = HA + ΔhAB (I.2) a a b b ΔhAB = a - b A B
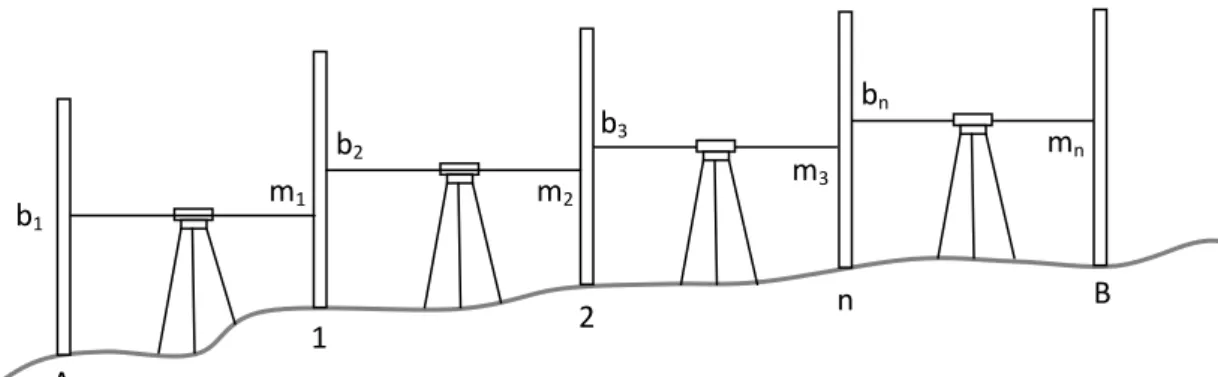
Jika jarak antar titik kontrol pemetaan relatif jauh, pengukuran beda tinggi dengan penyipat datar tidak dapat dilakukan dengan satu kali berdiri alat. Oleh karena itu, antara dua buah titik kontrol yang berturutan dibuat beberapa slag dengan titik-titik bantu pengukurannya dibuat secara berantai (differential levelling) (Basuki, 2006). Sipat datar berantai ini juga dilakukan ketika beda tinggi antar titik terlalu terjal, karena tidak dimungkinkan untuk melakukan pengukuran beda tinggi dengan sekali berdiri alat.
Keterangan :
A dan B : titik tetap yang akan ditentukan beda tingginya
1, 2, 3, ... n : titik-titik bantu pengukuran
m1, m2, m3, ...mn : bacaan rambu depan
b1, b2, b3, ...bn : bacaan rambu belakang
Pada gambar 1.2., untuk menentukan beda tinggi antara titik A dan B yang berjauhan, maka diantara kedua titik tersebut dibuat beberapa slag dengan titik-titik bantu yang pengukurannya dibuat secara berantai. Nilai beda tinggi antara titik A dan B merupakan jumlah total beda tinggi pada tiap slag pengukuran sepanjang lintasan antara kedua titik tersebut
Dari pengukuran sipat datar berantai antara titik A dan titik B yang ditunjukkan pada Gambar I.2, nilai pengukuran ΔhAB merupakan total Δh dari tiap slag dari i = 1 sampai n pada lintasan tersebut. Nilai ΔhAB dapat ditentukan dengan persamaan:
ΔhAB = ΔhA1 + Δh12 + ... + ΔhnB ΔhAB = (I.3) A b1 m1 1 2 b2 m2 n b3 m3 B bn mn
Sebelum digunakan alat ukur sipat datar harus memenuhi beberapa syarat tertentu yaitu, garis bidik teropong sejajar dengan garis arah nivo yang merupakan syarat utama, garis arah nivo tegak lurus sumbu I, dan garis mendatar diafragma tegak lurus sumbu I (Basuki, 2006) .
Seperti halnya pengukuran jarak dan sudut, pengukuran beda tinggi juga tidak cukup dilakukan dengan sekali jalan, tetapi dibuat pengukuran pergi-pulang, yang pelaksanaannya dapat dilakukan dalam satu hari (seksi), serta dimulai dan diakhiri pada titik tetap.
Pada pengukuran sipat datar pergi-pulang hasil pengukuran yang diperoleh harus berada pada tingkat ketelitian yang sesuai dengan tingkat ketelitian kelas. Tingkat ketelitian kelas sangat menentukan kualitas dari pengukuran sipat datar yang dihasilkan dan tingkat ketelitian kelas ini pada tahap pemilihannya disesuaikan dengan tingkat ketelitian kerangka kontrol yang akan dicapai. Berikut lima tingkatan orde pengukuran sipat datar dari yang tertinggi sampai tingkat yang terendah menurut (BSN, 2004) merupakan penjabaran kriteria untuk penempatan kelas dari standar kesalahan penutup loop hasil hitungan perataan (BSN, 2004):
Pengukuran sipat datar dengan kelas pengukuran LAA yaitu pengukuran
sipat datar dengan batas toleransi maksimum 2 mm* (D adalah jarak
keseluruhan dari pengukuran dalam satuan km).
Pengukuran sipat datar dengan kelas pengukuran LA yaitu pengukuran sipat
datar dengan batas toleransi maksimum 4 mm* .
Pengukuran sipat datar dengan kelas pengukuran LB yaitu pengukuran sipat datar dengan batas toleransi maksimum ≤ 8mm*√D.
Pengukuran sipat datar dengan kelas pengukuran LC yaitu pengukuran sipat datar dengan batas toleransi maksimum ≤ 12mm*√D
Pengukuran sipat datar dengan kelas pengukuran LD yaitu pengukuran sipat datar dengan batas toleransi maksimum 12mm*√D atau tingkat orde 4.
Pada penjelasan di atas D adalah jarak antar titik pengamat keseluruhan pada saat melakukan pengukuran sipat datar atau dapat dikatakan jarak dari keseluruhan
slag dari suatu kerangka pengukuran. Untuk mengetahui apakah pengukuran yang dilakukan telah sesuai dengan kelas yang ditentukan maka caranya adalah dengan menjumlahkan seluruh pengukuran beda tinggi maka akan didapat suatu besaran yang merupakan selisih dari harga jumlah pengukuran yang sebenarnya yaitu 0 (ΣΔh
= 0) yang dapat bernilai positif maupun negatif. Maka harga inilah yang kemudian
dibandingkan dengan harga yang telah didapat dari perhitungan kelas seperti yang telah dipaparkan di atas. Sehingga jika hasil mutlak dari jumlah keseluruhan pengukuran beda tinggi lebih kecil dari harga yang tertera pada kelas maka pengukuran telah masuk toleransi begitu juga sebaliknya jika hasil penjumlahan lebih besar maka pengukuran harus diulang (ΣΔh < kelas masuk toleransi).
Ketelitian hasil pengukuran tinggi dapat dilihat dari kesalahan penututp hasil ukuran pergi pulang dalam seksi ataupun dalam satu kring. Ketelitian pengukuran beda tinggi pada sipat datar dan Total Station dikategorikan pada tingkatan pengukuran sipat datar tingkat yang sesuai dengan klasifikasi. Klasifikasi ditentukan oleh faktor-faktor desain jaringan, pelaksanaan pengukuran, peralatan yang digunakan, teknik hasil reduksi dan hasil hitung perataan terkendala minimal
(minimal constraint).
I. 6. 3. Penentuan beda tinggi secara trigonometrik
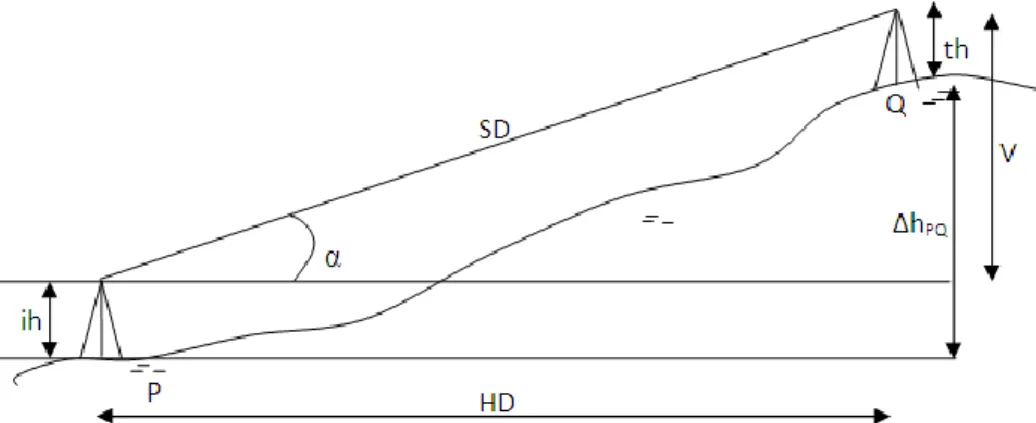
Pengukuran beda tinggi dengan cara trigonometrik adalah salah satu metode penentuan beda tinggi dari satu titik ke titik yang lain. Pengamatan ini dilakukan dengan cara mengukur sudut vertikal, jarak miring/datar antar titik, tinggi instrumen serta tinggi target. Sudut miring dapat diukur dengan alat teodolit ataupun total station, sedangkan jarak dapat diukur menggunakan jarak optis ataupun EDM. Gambar 1.3. berikut ini adalah penjelasan pengukuran beda tinggi cara trigonometrik (Basuki, 2006).
Gambar I. 3. Pengukuran cara trigonometrik
Keterangan Gambar I.3. P : tempat berdiri alat Q : titik yang diamat
SD : jarak miring (slope distance)
HD : jarak mendatar (horizontal distance)
V : jarak vertikal antara sumbu II teropong dengan pusat reflektor ih : tinggi instrumen di atas titik P
th : tinggi target di atas titik Q ∆ hPQ : beda tinggi antar PQ
α : sudut vertikal Dari gambar 1.3. diketahui bahwa :
V = SD sin α (1.4)
Beda tinggi antara titik P dan Q dapat dihitung dengan persamaan (1) berikut :
∆hPQ = ih + V – th (1.5)
Jika ketinggian titik P (HP) diketahui, dan tinggi titik Q (HQ) adalah besaran yang
dicari, maka besaran ukuran dapat dihitung sebagai berikut
I. 6. 4. Hitung Kuadrat Terkecil Metode Parameter
Metode hitung perataan kuadarat terkecil adalah metode perhitungan yang digunakan untuk mencari suatu nilai akhir sehingga jumlah kuadrat dari residual minimum. Residual adalah beda antara ukuran dengan nilai hasil hitungan. Dalam metode kuadrat terkecil, dikenal beberapa metode yang untuk kepraktisannya mudah digunakan dan mudah untuk dimengerti. Metode kuadrat terkecil tersebut diantaranya adalah metode kuadrat terkecil dengan menggunakan bantuan parameter yang nantinya metode ini disebut sebagai metode parameter.
Pada metode ini, harus dicari sejumlah parameter (besaran yang belum diketahui nilainya) yang masing-masing parameter yang dicari adalah independent. Setelah parameternya ditentukan selanjutnya ditentukan hubungan masing-masing ukuran dengan parameter-parameter tersebut.
Perlu diketahui bahwa pada suatu pengukuran pasti dihinggapi dengan kesalahan dan kesalahan inilah yang membuat suatu pengukuran berbeda dengan ukuran sebenarnya. Pada metode ini residual (V) dan ukuran terkoreksi (La) dimodelkan sebagai fungsi matematika yaitu (Hadiman, 2001) :
La = L + V (1. 7) V = nAuuX1 + nF1 (1. 8) X = - ( At P A )-1 ( At P F ) (1. 9) (1. 10) Σx = ( At P A )-1 (1. 11) Keterangan: La : Ukuran terkoreksi L : Nilai pengukuran n : Jumlah pengukuran u : Jumlah parameter
r (n-u) : derajad kebebasan
V : Matriks kolom yang sering disebut sebagai vektor residual dengan banyaknya elemen sejumlah pengukuran (n)
A : Matriks koefisien parameter berbentuk empat segi panjang dengan baris merupakan pengukuran dan kolom merupakan parameter X : Matrik parameter
F : Vektor sisa
: Varian aposteori
Σx : Matrik kovarian parameter
P : Bobot Pengukuran
I.6.4.1. Evaluasi hitung perataan. Rank suatu matriks didefinisikan sebagai dimensi tertinggi dari suatu matriks sehingga determinannya tidak nol. Suatu matriks bujur sangkar beronde n dikatakan mempunyai kekurangan rank bila matriks tersebut memiliki rank lebih kecil dari m. Kekurangan rank (rank deficiency) ini merupakan selisih dari dimensi matriks tersebut dengan rank matriks itu sendiri. Hitung perataan berkendala minimum (minimum constrain adjustment) adalah hitung perataan dengan jumlah unsur yang diketahui (referensi) sebanyak kekurangan rank nya.
Dalam kaitannya dengan aplikasi di bidang Geodesi, kekurangan rank disebabkan karena belum terdefinisikan sistem koordinat (Soeta’at, 1996). Matriks yang mempunyai kekurangan rank merupakan matriks singular yang tidak bisa diinversikan. Kekurangan rank atau rank deficiency disebabkan oleh belum terdefinisinya sistem koordinat. Pada sistem koordinat 1D, misalnya sipat datar, ada kekurangan rank sebanyak satu, sehingga sistem koordinat 1D terdefinisi dengan menentukan satu titik sebagai referensi (tinggi). Pada sistem koordinat 2D, misalnya kontrol horizontal, ada kekurangan rank sebanyak empat, sehingga sistem koordiant 2D terdefinisi bila ada empat unsur yang dipakai sebagai referensi. Sehingga yang dimaksud dengan perataan dengan kendala minimal (minimal constraint adjusment) adalah perataan dengan jumlah unsur yang diketahui (referensi) sebanyak kekurangan rank-nya (Soeta’at, 1996)
I.6.4.2. Bobot pengukuran. Bobot suatu pengukuran merupakan perbandingan ketelitian antara besaran-besaran yang diukur. Besaran pengukuran yang didapat dari suatu pengukuran mempunyai tingkat ketelitian yang berbeda oleh karena itu dalam perhitungannya harus diberikan suatu nilai besaran (bobot pengukuran) yang sesuai dengan harga ketelitian dari suatu pengamatan (Hadiman, 1991). Bobot yang baik pada hitungan kuadrat terkecil akan menghasilkan varian akhir ( o2) yang
bersesuaian dengan varian awalnya (σo2) (Mikhail dan Gracie, 1981). Sedangkan
estimasi varian (σo2) yang kurang tepat akan mengakibatkan estimasi bobot
pengukuran yang kurang tepat (Soeta’at, 1996). Bobot dari pengukuran tunggal dapat didefinisikan sebagai satuan yang berbanding terbalik dengan varian pengukuran (σx2), sehingga:
P = . (I.12)
Dalam hal ini k adalah konstanta sebagai pembanding nilai pengamatan. Bila suatu pengamatan mempunyai bobot yang sama dengan satu (P = 1) dan nilai varian pengukuran sama dengan varian apriori (σo2), maka:
1 = (I. 13)
Dari kedua persamaan (1.12) dan (1.13) akan diperoleh persamaan di bawah ini:
P = (I. 14)
Dalam hal ini:
σo2 : varian apriori
σx2 : varian pengukuran
Pada saat pengukuran tidak saling berkorelasi sehingga matriks varian kovarian pengukuran merupakan suatu matriks diagonal, yaitu:
Dalam hal ini:
ΣL : matriks varian kovarian pengukuran
σx2 : varian pengukuran ke n
Dari persamaan di atas didapatkan hubungan bobot pengukuran dengan pengukuran adalah:
P1 = σo2 / σ12, P2 = σo2 / σ22, ..., Pn = σo2 / σn2
Diperoleh matriks bobot P:
P = (I.16)
Dari persamaan akan menjadi :
P = σo2 (I.17)
Jika dituliskan dalam bentuk notasi persamaan menjadi :
P = σo2 ΣL-1 (I. 18)
Pengukuran beda tinggi dilakukan dengan membaca bacaan rambu depan dan bacaan rambu belakang. Apabila pada setiap pengukuran diterapkan prosedur pengaturan alat yang sama, maka dapat diasumsikan bahwa αa dan αb memunyai
ketelitian yang sama yang dinyatakan dengan σα. Jika rambu depan dan rambu
belakang yang digunakan mempunyai jenis yang sama, maka diasumsikan pembacaan rambu depan dan rambu belakang mempunyai ketelitian yang sama, dengan ketelitian σβ. Dari penjelasan tersebut, selanjutnya bobot seperjarak dan
sepervarian dikembangkan dari persamaan:
Apabila jarak D tiap slag pengamatan, jumlah slag pengamatan n dibuat sama dan prosedur pengaturan alat yang diterapkan sama, maka nD(σα2+ σβ2) dianggap
sebagai konstanta k bagi semua pengukuran slag, sedangkan 2nD adalah panjang lintasan keseluruhan antara dua titik adalah S, sehingga:
σn2 = σΔhn2 = 2nDk = Sk (I. 20)
Untuk k = 1, σΔhn2 = S, maka:
P = = (I. 21)
Dari pengukuran total station bobot ditentukan menggunakan sepervarian pengukuran dari tinggi alat/ instrument (ti), tinggi ferlektor(tr), sudut miring (SD) dan
beda tinggi/ vertikal (h) .
Varian pada Total Station diperoleh :
= + sin2α + SD2 cos2α + (1. 22)
Dalam hal ini;
: varian beda tinggi titik PQ : varian sudut vertikal
: varian tinggi instrumen : varian tinggi target
: varian jarak miring (SD)
Sehingga bobot seperjarak dan sepervarian dapat ditulis:
Ps = (I. 23)
Pt = (1.24)
Ps : bobot pengukuran sipat datar Pt : bobot pengukuran total station
Sn : jarak antara dua titik yang diukur beda tingginya
I. 6. 4. 3. Evaluasi hasil hitung perataan. Pengamatan besaran ukuran secara berulang, akan diperoleh data pengamatan yang bervariasi nilainya. Variasi hasil pengamatan tersebut menunjukkan bahwa pengamatan mengandung kesalahan yang secara alamiah terkandung di dalamnya. Untuk mengetahui bahwa hasil pengamatan di lapangan tidak mengandung kesalahan tak acak maka nilai varian dan koreksi ukuran hasil pengamatan dilakukan pengujian secara statistik untuk daerah kepercayaan tertentu.
Selanjutnya pada hitung kuadrat terkecil, kesalahan pengamatan diasumsikan mengikuti sebaran normal, benar atau tidaknya asumsi tersebut perlu diuji dengan uji statistik. Uji statistik yang digunakan adalah Pope’s Tau (τ). Menurut Pope, varian pengukuran yang sebenarnya sulit untuk diketahui (Caspary, 2000). Di dalam teorinya, Pope menyebutkan bahwa perbandingan koreksi pengamatan dengan simpangan baku pengukuran harus mendekati hasil formula derajat kebebasan seperti pada persamaan berikut ini :
Ti
=
=
~ τ
(r) (1. 25)τ
(r)=
(1. 26)Dalam hal ini :
Vi : koreksi pengamatan ke-i
: matriks varian kovarian residual
r : derajat kebebasan
t : nilai table t
Ho pada τ tes mengasumsikan bahwa seluruh pengukuran telah terdistribusi
normal. Sehingga residual ekspetasi adalah nol, karena tidak ada kesalahan kasar. Alternatif hipotesis adalah Ha, apabila Ho ditolak. Sehubungan dengan hal tersebut,
Ti >
τ
(α/2) (1. 27)Dan sebaliknya, diterima apabila
Ti <
τ
(α/2) (1.28)Penolakan Ho disebabkan masih ada kesalahan kasar (gross error) pada
persamaan pengukuran. Melalui test τ, data snooping secara tidak langsung telah dilakukan, hal ini dikarenakan dengan metode tersebut nilai residual masing-masing pengukuran langsung diketahui.
I.6.5. Analisis kualitas jaring
Kualitas jaringan geodesi sangat ditentukan oleh kualitas data pengukuran. Kualitas bisa ditunjukkan dari hasil matriks varian kovarian parameter (Σxx). Nilai
varian dapat diperoleh dari elemen diagonal utama matriks varian kovarian. Melihat elemen diagonal utama matris varian kovarian bisa diperoleh nilai varian. Akar dari varian diperoleh simpangan baku parameter terkoreksi yang menunjukkan informasi ketelitian. Nilai simpangan baku menunjukkan presisi titik pada jaring. Penetuan presisi dilakukan dengan cakupan tidak seluruh jaringan tetapi presisi koordinat satu titik dan bisa diperoleh dari matriks varian kovarian. Kemudian melalui varian dan kovarian hubungan antar titik bisa dilihat dari nilai korelasi (r) untuk menilai kehandalan jaringan, menjelaskan bagaimana jaringan bereaksi terhadap bias yang kecil dari pengukuran, yaitu menunjukkan ketahanan jaringan terhadap besarnya kesalahan kasar yang tidak terdeteksi pada pengukuran.
Matriks varian kovarian titik/station pengukuran mengandung semua informasi tentang kepresisian hasil estimasi titik. Semakin kecil nilai variannya, semakin baik presisi titiknya. Informasi korelasi antara dua titik menunjukan bahwa semakin kecil nilainya korelasi semakin lemah korelasi antar kedua titik tersebut.
Dari matriks varian kovarian di atas, dapat dihitung nilai standart deviasi dan interval kepercayaan dari koordianta hasil estimasi. Jika nilai varian apriori diketahui, maka Ho akan mengikuti distribusi normal sedangkan jika digunakan nilai varian aposteori maka akan mengikuti kurva distribusi t- student.
I. 6. 5. 1. Evaluasi kualitas posisi. Ukuran yang dilakukan berulangkali diukur dengan menggunakan suatu alat ukur tertentu, kemudian diolah dengan proses sama dikenakan pada alat lain yang sama juga dilakukan secara berulang-ulang, maka akan dihasilkan dua ketelitian dan dua parameter hasil ukuran tersebut. Untuk menguji kepresisian dan akurasi ketelitian titik dua kelompok sampel tersebut dapat digunakan uji Fisher untuk menguji presisi parameternya, dan uji-τ untuk menguji akurasi parameternya.
Uji presisi titik. Uji Fisher (F-test) dapat digunakan untuk menguji kesesuaian varian antara dua kelompok sampel yang berdistribusi normal. Dengan menggunakan distribusi F (Fisher) dapat dilakukan uji kesamaan antara rata-rata varian tinggi hasil hitungan perataan kuadrat terkecil pertama dengan rata-rata varian tinggi hasil hitungan perataan kuadrat terkecil kedua . Distribusi F dapat dirumuskan sebagai berikut :
F = (I.30)
Pengujian dilakukan dengan nilai kesesuaian antara hasil hitungan dengan suatu nilai yang diharapkan. Kriteria pengujiannya adalah Ho diterima jika nilai berdasarkan nilai berikut :
< F < Ff1, f2,α/2 (I.31)
Dimana:
f1 : derajat kebebasan untuk pembilang
f2 : derajat kebebasan untuk penyebut
Apabila hipotesis diterima (Ho), menunjukkan bahwa titik tersebut
mempunyai presisi yang hampir sama atau tidak berbeda secara signifikan. Sebaliknya, apabila hipotesis ditolak (Ha) maka titik tersebut mempunyai presisi
ketelitian yang berbeda secara signifikan.
Uji akurasi titik. Selain uji τ untuk satu pihak, terdapat uji τ yang digunakan untuk menguji secara komparatif suatu parameter dari dua metode hasil hitung
perataan. Hipotesis nol diterima apabila dipenuhi besaran kriteria pada persamaan (I.32) berikut ini (Soeprapto, 2005) :
(I.32)
Dalam hal ini :
: Nilai parameter metode satu : Nilai parameter metode dua
: Nilai varian dari parameter metode satu : Nilai varian dari parameter metode dua Hiptesis nol ( Ho ) diterima berdasarkan nilai berikut ini :
τ (1-α/2) < τi < τ (α/2) (I.33)
Apabila hipotesis nol (Ho) diterima maka nilai akurasi parameter metode satu
tidak berbeda secara signifikan dengan akurasi parameter metode dua. Alternatif hipotesis Ha, apabila Ho ditolak, yaitu nilai parameter metode satu berbeda secara
signifikan dengan parameter metode dua.
I.6.5.2. Evaluasi Kekuatan Geometri Jaring. Evaluasi kekuatan geometri jaring dengan menggunakan nilai korelasi antar titik. Soetaat, (1996) menjelaskan mengenai ill condition system yaitu adanya kondisi yang “sakit” yang bisa digunakan untuk menganalisis jaring yang digunakan.hal ini umumnya terjadi karena kondisi jaringan (strength of figure) yang kurang baik. Bisa dilihat dari nilai koefisien antar parameter yang dihitung dari
:
r
12 (1.34 )Dimana : r12 = korelasi antara parameter 1 dan parameter 2
q12 = Nilai kovarian
q1, q2 = niai simpangan baku masing-masing parameter
Nilai r yang mendekati +1 atau -1 merupakan indikator adanya ill condition
system. Seharusnya adanya kondisi ini sudah terdeteksi pada waktu optimasi atau
merubah bentuk jaring atau mungkin juga bisa dengan menambah pengukuran. Dalam hal ini untuk menge cek lagi apakah di dalah pengukuran yang dilakukan korelasinya bagus ataiu tidak. Dari uji korelasi akan tampak korelasi data hasil hitungan dari pengukuran yang sudah dilakukan.
1.6. 6. Analisis pergeseran vertikal
Penentuan pergeseran vertikal adalah besarnya perubahan tinggi dari suatu titik yang diukur dari dua kala pengamatan yang berbeda. Analisis untuk mengetahui besarnya pergerakan vertikal ini dilakukan dengan analisis pergeseran. Perbedaan tinggi titik dari semua titik pantau beserta ketelitiannya untuk masing-masing epoch dapat dihitung dengan hitung kuadrat terkecil metode parameter. Hasil pengamatan dari masing-masing epoch dapat dituliskan sebagai model hubungan seperti ditunjukkan pada persamaan berikut ini (Yulaikhah, 2004):
Vi = AXi + Fi untuk epoch ke-i
Vi+1 = AXi+1 + Fi+1 untuk epoch ke-i+1 (1.35)
Dimana nilai Xi dan Xi+1 diperoleh dari hitung kuadrat terkecil metode
parameter, sehingga vektor pergeseran d dapat dihitung dari selisih nilai perameter dua buah epoch pengamatan yang berbeda yaitu :
di = Xi+1 - Xi (1.36)
Untuk menentukan parameter pergeseran dan menganalisis ada tidaknya pergeseran pada titik-titik pantau, dilakukan hitungan analisis pergeseran pada titik yang sama. Data yang digunakan dalam hitung analisis pergeseran vertikal adalah nilai pergeseran titik dengan simpangan baku masing-masing titik. Untuk mengetahui adanya pergeseran atau tidak pada titik pantau maka disini digunakan Uji Tau :
(1.37)
Dimana :
di : vektor pergeseran x1 : nilai pengamatan 1
x2 : nilai pengamatan 2 : simpangan baku 1 : simpangan baku 2
Pengujian ini adalah untuk memastikan bahwa besaran yang dimodelkan benar-benar diterima secara statistik. Untuk menghitung nilai τi (nilai hitung t) setiap
data pengamatan menggunakan persamaan (I.38) berikut ini :
(I.38) Dimana :
: Koreksi pengamatan ke-i
: Simpangan baku koreksi ke-i (akar dari elemen diagonal matriks Σvv)
Hipotesis nol (Ho) pada τ-tes mengasumsikan bahwa seluruh pengukuran telah
terdistribusi normal. Sehingga residual ekspetasi adalah nol, karena tidak ada kesalahan kasar. Alternatif hipotesis adalah Ha, apabila Ho ditolak. Sehubungan
dengan hal tersebut, Ho diterima berdasarkan nilai berikut ini :
τ (1-α/2) < τi < τ (α/2) (I.37)
Apabila hipotesis diterima (Ho), menunjukkan bahwa titik ke-i tidak
mengalami pergeseran dan sebaliknya, apabila hipotesis ditolak (Ha) maka titik
tersebut mengalami pergeseran. .
1.7. Hipotesis
Berdasarkan hasil studi pustaka dan dasar teori yang ada, maka hipotesis penelitian ini adalah:
- Pengukuran sipat datar tahun 2011 lebih teliti dari pengukuran Total Station 2012.
- Bentuk jaring 2012 lebih baik dari 2011 dilihat dari bentuk geometri jaring.
- Terjadi pergeseran posisi vertikal berdasarkan data pengukuran dua periode.