1
BAB I
PENDAHULUAN
I. I.1 Latar Belakang
Survei batimetri adalah proses penggambaran garis-garis kontur kedalaman dasar perairan yang meliputi pengukuran, pengolahan, hingga visualisasinya. Survei batimetri sendiri hanya menggambarkan bentuk dasar laut dari suatu perairan, tidak sampai menggambarkan kandungan material dan biota laut yang hidup disana. Pada survei batimetri akan didapatkan garis-garis kontur kedalaman, dimana garis-garis tersebut didapat dengan menginterpolasikan titik-titik pengukuran kedalaman yang tersebar pada lokasi yang dikaji (Djunarsjah, 2005).
Peta batimetri dalam aplikasinya memiliki banyak manfaat dalam bidang kelautan antara lain penentuan jalur pelayaran yang aman, perencanaan bangunan pinggir pantai, pendeteksian adanya potensi bencana tsunami di suatu wilayah, dan pertambangan minyak lepas pantai. Selain itu, peta batimetri diperlukan untuk mengetahui kondisi morfologi suatu daerah perairan. Peta batimetri harus selalu di
update sesuai dengan perubahan dan perkembangan kondisi perairan tersebut, hal ini
dikarenakan kondisi laut yang sangat dinamis (Nurjaya, 1991 dalam Defrimilsa, 2003).
Kegiatan pemetaan batimetri merupakan hal yang tidak terpisahkan untuk keperluan studi wilayah perairan. Dibutuhkan teknologi yang sangat baik untuk dapat memberikan informasi mengenai kondisi topografi dasar perairan secara baik. Kegiatan pengumpulan data untuk proses akuisisi data batimetri memiliki beragam metode dan teknologi yang terus berkembang. Hal tersebut didasari oleh kebutuhan untuk mendapatkan informasi dasar perairan yang baik dan teliti.
Dewasa ini, terdapat beberapa penggunaan teknologi pengumpulan data batimetri yang cukup populer yaitu teknologi multibeam echosounder (MBES) dan
singlebeam echosounder (SBES). Kedua teknologi ini menggunakan prinsip dasar
yang sama yaitu sama-sama memanfaatkan gelombang akustik sebagai media untuk menentukan kedalaman titik pemeruman yang dipancarkan melalui transducer.
cepat rambat yang telah diketahui sebelumnya, kemudian ketika telah mencapai dasar laut gelombang akustik tersebut dipantulkan kembali oleh objek dasar laut dan akhirnya diterima kembali oleh sensor penerima pada transducer. Nilai kedalaman ukuran diperoleh dari perhitungan setengah kali selisih waktu pemancaran gelombang hingga penerimaan kembali gelombang tersebut oleh transducer dikalikan dengan kecepatan rambat gelombang.
Perbedaan utama MBES dan SBES yaitu pada jumlah beam serta frekuensi gelombang akustik yang digunakan. SBES hanya memancarkan satu beam sehingga mendapatkan satu titik kedalaman sedangkan MBES memancarkan lebih dari satu beam sehingga mendapatkan banyak titik kedalaman untuk satu kali pancaran gelombang akustik. Pola pancaran yang dimiliki MBES ini melebar dan melintang terhadap badan kapal. Setiap beam memancarkan satu pulsa suara dan memiliki penerimaannya masing-masing. Saat kapal bergerak hasil sapuan MBES tersebut menghasilkan suatu luasan area permukaan dasar laut yang lebih luas dari cakupan area survei menggunakan SBES (Moustier, 2005).
Pada kenyataannya, walaupun kedua alat survei batimetri ini memiliki prinsip dasar yang sama dan diperuntukkan untuk dapat memberikan informasi mengenai data kedalaman, akan tetapi tetap saja tidak akan dapat memberikan nilai kedalaman yang 100% sama untuk keselurahan wilayah survei pada posisi yang sama dikarenakan perbedaan tipe alat dan frekuensi gelombang akustik yang digunakan. Pada umumnya frekuensi gelombang akustik SBES merupakan tipe frekuensi rendah sedangkan gelombang akustik MBES merupakan tipe frekuensi tinggi.
Penggunaan SBES dengan frekuensi rendah ini di dalam survei batimetri memiliki ketelitian yang cukup akurat, dimana SBES mampu memberikan ketelitian hingga 0,1 meter pada kedalaman kurang dari 100 meter (Lekkerkerk, dkk, 2006). Begitu juga halnya dengan MBES yang juga mampu memberikan ketelitian hingga 0,1 meter pada area survei perairan dangkal (Dewantoro, dkk, 2012)
Setiap pengukuran batimetri baik menggunakan SBES maupun MBES akan selalu memiliki kesalahan. Kesalahan didalam pengukuran batimetri misalnya saja terdapat outlier pada titik-titik hasil pemeruman. Kesalahan ini tentu saja seharusnya dihilangkan baik pada saat proses akuisisi data maupun pada saat pengolahan data
agar nantinya dapat memberikan hasil pengukuran batimetri yang dapat merepresentasikan kondisi permukaan dasar laut yang sebenarnya.
Disamping dengan menghilangkan nilai-nilai kedalaman yang dianggap salah untuk data pengukuran batimetri, perlu juga adanya kontrol kualitas data hasil pengolahan batimetri tersebut. Kontrol kualitas data hasil pengukuran batimetri sudah ditentukan dalam standar internasional yang dijelaskan dalam International
Hydrograpic Organitation (IHO) SP-44 edisi ke 5 tahun 2008. Adanya kontrol
kualitas ini dimaksudkan untuk semakin memberikan gambaran bahwa data hasil pengukuran batimetri sudah secara baik mampu memberikan informasi keadaan dasar laut secara teliti dan sesuai dengan keadaan yang sebenarnya.
Pada penelitian ini, data MBES yang diperoleh dari hasil akuisisi data MBES tipe Seabeam ELAC 1050D yang memiliki frekuensi 50 kHz dan 180 kHz dan termasuk dalam tipe frekuensi tinggi diperbandingkan dengan data SBES yang diperoleh dari hasil akuisisi data batimetri tipe ODOM Echotrac DF3200 yang memiliki frekuensi antara 3-24 kHz dan termasuk dalam tipe frekuensi rendah pada area studi perairan dangkal. Identifikasi kualitas kedua data batimetri didasarkan pada standar IHO SP-44 edisi ke 5 tahun 2008.
II. I.2 Identifikasi Masalah
Didalam survei batimetri permukaan dasar laut dihasilkan data-data kedalaman yang didapat baik melalui kegiatan pemeruman menggunakan alat multibeam
echosounder ataupun singlebeam echosounder. Perbedaan peralatan dan frekuensi
gelombang akustik yang digunakan dapat menjadi salah satu penyebab adanya perbedaan dalam nilai kedalaman yang diperoleh dari kedua jenis alat tersebut untuk posisi titik pemeruman yang sama.
III. I.3. Pertanyaan Penelitian
Berdasarkan identifikasi masalah di atas, maka pertanyaan penelitian ini yaitu: 1. Apakah kualitas data batimetri dari hasil pengukuran multibeam echosounder
tipe Seabeam ELAC 1050D dan data singlebeam echosounder tipe ODOM Echotrac DF3200 sesuai dengan standar IHO SP-44 edisi ke 5 tahun 2008? 2. Bagaimanakah perbandingan data kedalaman hasil pengukuran multibeam
echosounder tipe Seabeam ELAC 1050D dan data singlebeam echosounder
tipe ODOM Echotrac DF3200?
IV. I.4 Tujuan Penelitian
Dalam kegiatan penelitian ini tujuan yang hendak dicapai yaitu:
1. Menentukan kualitas data hasil pengukuran multibeam echosounder tipe Seabeam ELAC 1050D dan data singlebeam echosounder tipe ODOM Echotrac DF3200 di perairan dangkal berdasarkan standar IHO SP-44 edisi ke 5 tahun 2008.
2. Mengetahui perbandingan data hasil pengukuran multibeam echosounder dengan data singlebeam echosounder tersebut di perairan dangkal.
V. I.5 Manfaat Penelitian
Manfaat yang ingin diperoleh dalam kegiatan penelitian ini, yaitu:
1. Dapat memberikan gambaran mengenai tingkat perbedaan data hasil pengukuran multibeam echosounder dengan data singlebeam echosounder di perairan dangkal.
2. Dapat dijadikan sebagai bahan pertimbangan untuk penentuan pemilihan alat dalam kegiatan survei batimetri.
VI. 1.6. Lingkup Penelitian
Dalam kegiatan penelitian ini ada beberapa batasan masalah yang ada yaitu: 1. Data batimetri dari multibeam echosounder yang digunakan merupakan data
hasil olahan yang telah terkoreksi dan telah dieksport kedalam bentuk file ASCII dimana data kedalamannya telah direfrensikan terhadap Lowest
Astronomical Tide (LAT) oleh Balai Teknologi Survei Kelautan (Teksurla),
Badan Pengkajian dan Penerapan Teknologi (BPPT).
2. Uji kualitas data batimetri hasil pengukuran multibeam echosounder tidak dilakukan dengan membandingkan selisih dari nilai kedalaman yang didapat pada posisi yang sama (titik kedalaman pada area overlap survei MBES) dengan batas toleransi selisih nilai kedalaman tersebut sesuai standar IHO SP-44 edisi ke 5 tahun 2008 karena data MBES merupakan data hasil olahan (bukan raw data) Balai Teksurla, BPPT Jakarta.
3. Data koreksi pasang surut yang digunakan merupakan data hasil olahan Balai Teksurla, Badan Pengkajian dan Penerapan Teknologi (BPPT) sebagai data koreksi ke bidang referensi Lowest Astronomical Tide (LAT)
4. Pengkajian perbandingan data batimetri multibeam echosounder dan
singlebeam echosounder dilakukan pada perairan dangkal (shallow water)
untuk studi kasus pada wilayah pipa bawah laut pertamina Balongan.
VII. I.7 Tinjauan Pustaka
Penelitian mengenai manfaat multibeam echosounder terhadap laut dalam telah dilakukan oleh Nugroho (2011). Didalam penelitiannya dijelaskan bahwa multibeam
echosounder mampu secara detil memberikan informasi kedalaman yang dihasilkan
dari survei batimetri sehingga dapat dijadikan dasar dalam pembuatan peta batimetri untuk keperluan navigasi. Peran pemetaan multibeam selanjutnya yang dijelaskan didalam penelitian laut dalam adalah membantu navigasi remotely operated vehicle
(ROV) ataupun wahana selam lainnya. Selain itu multibeam juga dapat memberikan
gambaran mengenai pola pergerakan arus laut berdasarkan kondisi topografi dasar laut.
Penelitian mengenai perbandingan alat pengukur kedalaman antara singlebeam
echosounder tipe ODOM Hydrotrac II dengan alat fishfinder tipe Garmin Map
Sounder 178 C telah dilakukan oleh Pramanda (2013) di waduk dengan kedalaman 1-40 meter. Didalam penelitiannya ini dianalisis bahwa berdasarkan uji statistik dengan tingkat kepercayaan 95% (-1,96 < to <+1,96), maka dapat dikatakan bahwa pada data kedalaman hasil pengukuran Echosounder ODOM secara statistik berbeda signifikan dengan data kedalaman hasil pengukuran Fishfinder saat
posisi transducer berdampingan. Sedangkan saat posisi transducer berseberangan, data kedalaman hasil pengukuran Echosounder ODOM tidak berbeda signifikan dengan data kedalaman hasil pengukuran Fishfinder. Diidentifikasi juga bahwa titik-titik yang mempunyai beda kedalaman yang signifikan, disebabkan oleh blunder atau outlier data yang dipengaruhi oleh kondisi terrain pada suatu area pemeruman. Selain itu, berdasarkan hasil perhitungan nilai kesalahan pada kedalaman area 1-40 m, alat Fishfinder GARMIN MapSounder 178C lebih cocok digunakan pada area variatif (kedalaman < 20 m) dan alat
Echosounder ODOM Hydrotrac II lebih cocok digunakan pada area seragam
(kedalaman > 20 m).
Penelitian mengenai ketidakpastian model batimetri yang dihasilkan oleh data
multibeam echosounder dan singlebeam echosounder di laut dalam telah dilakukan
oleh Marks dan Smith (2008). Didalam penelitian tersebut dijelaskan bahwa 95% pemeruman di Utara Atlantik memiliki keakuratan hingga 1.6% dari kedalaman. Kebanyakan kesalahan (error) berada pada lokasi lereng laut yang luas, dimana kesalahan navigasi yang kecil dapat menyebabkan kesalahan pengukuran kedalaman yang besar. Data singlebeam echosounder yang diukur pada waktu yang lebih lampau, dapat memiliki keakuratan seperti multibeam echosounder. Selain itu dijelaskan juga bahwa model ketidakpastian (uncertainty) dapat diterapkan pada data SBES dan MBES, baik keduanya itu data lama maupun baru yang digunakan untuk memfasilitasi pemetaan laut dalam dari data yang ada sebelumnya. Model ketidakpastian tersebut disajikan dalam persamaan I.1.
+ (bz)2+(cs)2...(I.1) Dimana z merupakan kedalaman, s merupakan kemiringan (slope), dan , b, c, merupakan konstanta yang telah ditentukan diantara tahun 1969 hingga 1968.
Dari beberapa tinjauan pustaka ini penulis ingin memberikan analisis mengenai perbedaan data kedalaman yang dihasilkan dari pemetaan menggunakan multibeam
echosounder dan singlebeam echosounder pada posisi titik perum yang sama
sehingga dapat diperkirakan seberapa signifikan perbedaan data kedalaman yang dihasilkan pada studi wilayah perairan dangkal yang selanjutnya dihubungkan
dengan penggunaanya sebagai salah satu dasar pertimbangan dalam penentuan alat survei batimetri.
VIII. I.8 Landasan Teori I.8.1 Singlebeam Echosounder (SBES)
Singlebeam echosounder merupakan alat ukur kedalaman air yang
menggunakan pengirim dan penerima sinyal gelombang suara tunggal. Prinsip kerja dari SBES yaitu menggunakan prinsip pengukuran selisih fase pulsa, yaitu menghitung selisih waktu dari waktu pemancaran dan penerimaan dari pulsa akustik. SBES juga cukup akurat, dimana SBES mampu memberikan ketelitian hingga 0,1 meter pada kedalaman kurang dari 100 meter (Lekkerkerk, dkk, 2006).
I.8.1.1. Prinsip kerja singlebeam echosounder. Pada pengukuran SBES, terlebih dahulu ditentukan kecepatan dari beam yang akan dipancarkan misalnya 1500 m/s. Penentuan kecepatan beam ini biasanya disesuaikan pada saat proses koreksi
barchek. Setelah itu ditentukan repetition rate (banyaknya beam per detik) dari
SBES. Setelah kedua komponen tersebut di set, maka repetition rate tersebut diaplikasikan terhadap transducer.
Transducer biasanya terpasang pada lambung kapal, dan pemasangannya juga
harus selalu berada di bawah permukaan air. Transducer mengirimkan pulsa akustik dengan frekuensi tertentu secara langsung menyusuri bawah kolom air. Pulsa tersebut kemudian dipantulkan kembali oleh objek yang ada dipermukaan dasar laut dan diterima kembali oleh sensor penerima yang ada di transducer.
Transducer terdiri dari sebuah transmitter yang mempunyai fungsi sebagai
pengontrol panjang gelombang pulsa yang dipancarkan dan menyediakan tenaga elektris untuk besar frekuensi yang diberikan. Transmitter ini menerima beam secara berulang-ulang dalam kecepatan yang tinggi, sampai orde kecepatan milisekon.
Beam tersebut kemudian diteruskan ke Limiter/Pre-Ampifier dan Time Varied Gain.
Kedua alat ini akan menyesuaikan intensitas dari beam tersebut hingga dapat diinterpretasikan oleh SBES. Apabila beam tersebut menempuh jarak pantul yang jauh, maka sinyal beam tersebut akan melemah dan perlu diamplifikasi, begitu juga sebaliknya apabila beam tersebut menempuh jarak pendek, maka sinyal dari beam tersebut akan terlalu kuat sehingga harus direduksi. Detector kemudian merubah
beam yang telah disesuaikan tersebut menjadi rekaman analog dalam kertas analog. Untuk merubah rekaman analog tersebut menjadi digital, maka dilakukan pengukuran waktu tempuh sinyal dengan menambahkan data kecepatan beam di awal (Madalila, 2012). Diagram dari proses-proses ini dapat dilihat pada Gambar I.1
I.8.1.2. Kalibrasi singlebeam echosounder. Koreksi kecepatan gelombang suara untuk perairan dangkal dilakukan menggunakan barchek. Koreksi barchek merupakan koreksi yang dilakukan untuk menghilangkan kesalahan sistematik dari alat. Barchek terbuat dari lempeng logam berbentuk lingkaran atau segi empat yang digantungkan pada tali atau rantai berskala dan diletakkan dibawah transducer. Tali atau rantai berskala digunakan sebagai pembanding hasil ukuran dengan hasil yang terbaca oleh alat perum. Pembandingan hasil pengukuran kedalaman dilakukan untuk setiap perubahan kedalaman, mulai dari 0 meter hingga kedalaman maksimum yang Gambar I. 1 Diagram singlebeam echosounder (Lekkerkerk, dkk, 2006)
Kecepatan Sinyal Unit Kontrol Waktu Frekuensi pengulangan sinyal akustik Transmit Oscilattor Transducer Pre-Ampifier/Limiter Time-varied gain Detector Pengukuran waktu tempuh sinyal Data output digital Representasi digital Representasi Analog
akan diperum dengan interval 1 meter (Poerbandono,dkk, 2005). Data pengukuran
barchek yang diperoleh digunakan untuk mencari hubungan antara kedalaman
sebenarnya dengan kedalaman hasil ukuran menggunakan echosounder dalam bentuk persamaan linear. Persamaan linear yang dibentuk dapat dilihat pada persamaan I.2 (Anonim, 2002):
dc = [[ ( bari – bari+1 ) ÷ (reci – reci+1)] . (d0 – reci) ] + bari………...(I.2)
Keterangan:
dc : kedalaman sebenarnya
d0 : kedalaman hasil observasi
bari : kedalaman barchek pada chek point i
bari+1 : kedalaman bacaan alat pada barchek point i+1
reci : kedalaman bacaan alat pada barchek point i
reci+1 : kedalaman bacaan alat pada barchek i+1
I,i+1 : urutan point kalibrasi kedalaman dan reci< d0< reci+1
Pada perairan dalam koreksi dengan barchek tidak dianjurkan karena pengaruh arus bawah permukaan dan ombak di permukaan mengakibatkan rantai barchek melengkung sehingga ukuran data barchek yang didapat tidak sesuai dengan yang sebenarnya. Oleh karena itu untuk menganalisis kecepatan gelombang suara dengan menggunakan sifat fisik air laut dengan persamaan I.3 sebagai berikut (Adil, dkk, 1998):
V = 1410 + 4.21 T – 0.0370 D2 + 1.14 S + 0.018………...(I.3) Keterangan :
V : kecepatan suara pada tempratur (T), salinitas (S) dan kedalaman (D) S : salinitas air laut (%)
T : temperature (0C) D : kedalaman laut (meter)
I.8.2 Multibeam Echosounder (MBES)
I.8.2.1. Pengertian multibeam echosounder. Multibeam echosounder (MBES) merupakan suatu instrument hidro-akustik yang menggunakan prinsip yang sama dengan SBES. Perbedaan utama SBES dengan MBES adalah pada jumlah beam yang dipancarkan. SBES hanya memancarkan satu beam sehingga mendapatkan satu titik kedalaman sedangkan MBES memancarkan lebih dari satu beam sehingga mendapatkan banyak titik kedalaman untuk satu kali pancaran gelombang akustik. Berbeda dengan side scan sonar pola pancaran yang dimiliki MBES ini melebar dan melintang terhadap badan kapal. Setiap beam memancarkan satu pulsa suara dan memiliki penerimaannya masing-masing. Saat kapal bergerak hasil sapuan MBES tersebut menghasilkan suatu luasan area permukaan dasar laut (Moustier, 2005).
Transducer yang terdapat di dalam multibeam sonar terdiri dari serangkaian
elemen yang memancarkan pulsa suara dalam sudut yang berbeda. Biasanya hanya satu beam yang ditransmisikan tetapi menghasilkan banyak pantulan energi dari masing-masing pulsa suara yang ditransmisikan. Kemampuan setiap elemen
transducer menerima kembali pulsa suara yang dipantulkan tergantung kepada
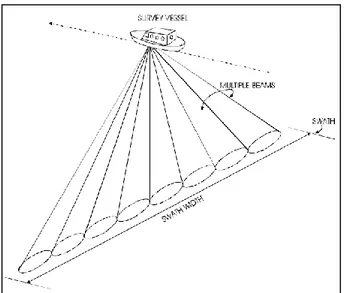
metode kalibrasi terhadap gerak kapal yang diterapkan (Hammerstad, 2000). MBES ini memiliki ketelitian yang sangat baik dalam pengukuran kedalaman. Selain memiliki ketelitian yang sangat baik, keuntungan penggunaan MBES ini yaitu cakupan area pengukuran yang luas (Moustier 2005). Cakupan area dasar laut yang mampu disurvei oleh kapal menggunakan multibeam dalam satu kali sapuan disebut dengan swath. Lebar swath untuk setiap jenis multibeam echosounder dapat berbeda-beda. Misalnya saja MBES dengan tipe ELAC SeaBeam 1050 D memiliki lebar
swath hingga 1530. Cakupan atau lebar sapuan (swath) MBES dapat dilihat pada Gambar I.2.
I.8.2.2. Prinsip kerja multibeam echosounder. Prinsip kerja MBES secara garis besar hampir sama dengan alat pengukuran yang menggunakan gelombang akustik, seperti SBES dan side scan sonar, yaitu secara sederhananya dengan memancarkan gelombang akustik melalui alat pemancar gelombang atau sering disebut transducer, dan menangkap kembali gelombang pantulnya. Kemudian mengukur perbedaan waktu antara gelombang saat awal dipancarkan hingga pantulan gelombang tersebut ditangkap kembali oleh sensor. Dengan sebelumnya telah ditentukan juga kecepatan rambat suara di dalam daerah penelitian, sehingga dapat dihitung jarak kedalaman suatu dasar laut.
Konfigurasi transducer merupakan gabungan dari beberapa projector yang tersusun seperti array (matriks). Projector merupakan bagian transducer MBES yang berfungsi sebagai saluran untuk memancarkan pulsa akustik menuju dasar laut. Semua sinyal akustik dari segala arah hasil pantulan obyek-obyek di dasar laut akan diterima kembali oleh rangkaian hydrophone (hydrophne array). Seluruh sinyal akustik akan diterima oleh masing-masing hydrophone secara simultan dengan selisih beda waktu penerimaan 4/3 sampai 8/3 milisecond tergantung pada panjang dan durasi dari sinyal akustik (Anonim, 2000)
Gelombang akustik yang dipantulkan dari dasar laut selanjutnya dianalisis oleh
transducer sehingga dapat dibedakan gelombang pantul yang datang dari arah yang
berbeda. Untuk mendeteksi arah datangnya sinyal yang dipantulkan oleh dasar laut, Gambar I. 2 Cakupan multibeam echosounder
transducer pada MBES menggunakan tiga metode pendeteksian, yaitu pendeteksian
amplitude, fase dan interferometrik (sudut).
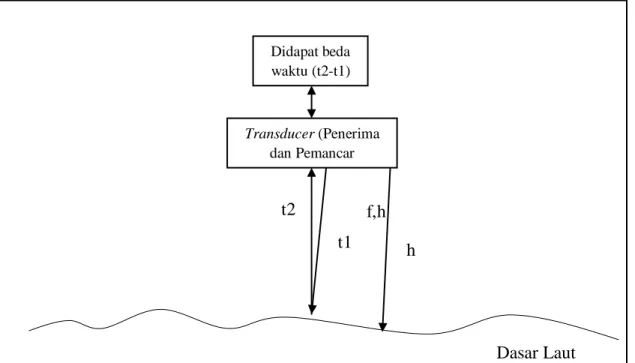
Pada umunya MBES menggunakan teknik interferometrik untuk mendeteksi arah datangnya gelombang pantul sebagai fungsi dari waktu. Pendeteksian interferometrik digunakan untuk menentukan sudut sinyal datang. Dengan menggunakan akumulasi sinyal akustik yang diterima pada dua array yang terpisah, suatu pola interferensi akan terbentuk. Pola ini menunjukkan hubungan fase tiap sinyal yang diterima. Berdasarkan hubungan yang ada suatu arah akan dapat ditentukan. Bila informasi ini dikombinasikan dengan jarak, akan dihasilkan data kedalaman (Sasmita, 2008). Gambar geometri gelombang akustik yang dipancarkan MBES dapat dilihat pada Gambar I.3.
Selisih fase pulsa dalam MBES artinya sebagai fungsi dari selisih fase waktu pemancaran dan waktu penerimaan. Kemudian perhitungan waktu tempuh dan arah sudut pancaran setiap stave yang ditentukan dari pengukuran selisih fase pulsa MBES.
I.8.2.3. Kalibrasi multibeam echosounder. Didalam penelitian ini tidak akan dijelaskan secara rinci mengenai teknis dilapangan untuk kalibrasi MBES akan tetapi
Gambar I. 3 Geometri waktu transducer (Djunarsjah, 2004)
Didapat beda waktu (t2-t1) Transducer (Penerima dan Pemancar t1 t2 f,h h Dasar Laut
lebih pada pengenalan jenis-jenis kalibrasi yang harus dilakukan sebelum dilakukan survei batimetri menggunakan MBES.
Proses kalibrasi yang dilakukan meliputi proses kalibrasi offset static, uji keseimbangan kapal (roll, pitch, gyro) serta kecepatan rambat akustik (Mann & Godin. 1998). Proses kalibrasi dilakukan untuk mendapatkan ketelitian survei batimetri yang baik dan meminimalkan tingkat kesalahan.
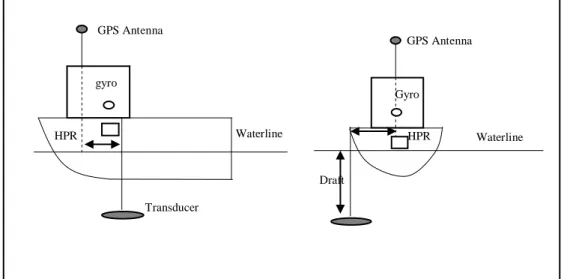
1. Kalibrasi Offset Statik
Kalibrasi ini merupakan kalibrasi yang dilakukan untuk melakukan penyesuaian jarak dari sensor-sensor yang digunakan terhadap “centerline” (titik nol) dari kapal dan transducer. Proses penyesuaian ini meliputi beberapa komponen yaitu kapal itu sendiri, antena GPS kapal, transducer,
gyro compass, dan Motion Reference Unit (MRU). Kalibrasi offset statik
dapat dilihat pada Gambar I.4.
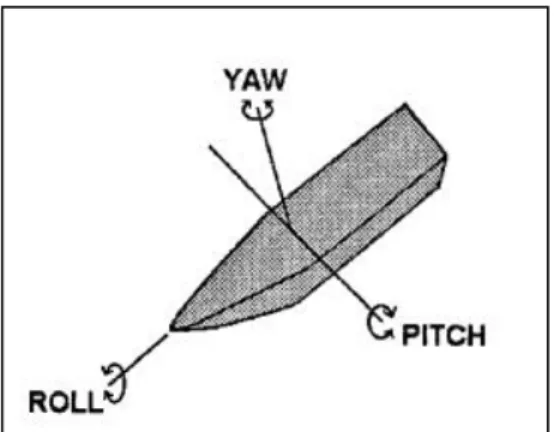
2. Kalibrasi Patch Test
Patch Test merupakan suatu kalibrasi yang memiliki parameter berupa waktu tunggu
(time delay), roll, pitch, dan yaw (Lekkerkerk, dkk, 2006). Ilustrasi keadaan roll,
pitch, dan yaw dapat dilihat pada Gambar I.5.
Gambar I. 4 Kalibrasi offset statik (Mann, 1998)
gyro HPR Transducer Waterline GPS Antenna Waterline Gyro Draft HPR GPS Antenna
a. Waktu Tunggu (time delay)
Waktu tungu pada MBES adalah keadaan dimana pengambilan data kedalaman oleh transducer tidak sinkron dengan pengambilan data oleh DGPS. Kesalahan waktu tunggu lebih kecil dari 2 detik akan sangat berarti jika kedalaman area survei lebih kecil dari 100 meter karena akan mempengaruhi tingkat akurasi (simpangan baku) penentuan posisi hingga 0.1 sampai 3 meter. Kecepatan kapal juga berpengaruh terhadap besarnya kesalahan waktu tunggu (Godin 1998). Geometri seperti Gambar I.6 digunakan untuk mengilustrasikan persamaan time delay pada persamaan I.4.
TD = tan -1 (I.4)
Gambar I. 5 Roll, pitch, dan yaw (Mann, 1998)
Dimana, TD merupakan kesalahan waktu tunggu (time delay) dalam detik, da
panjang pergeseran jalur, vh adalah kecepatan kapal yang lebih cepat, dan vt merupakan kecepatan kapal yang lebih lambat (Mann 1998).
b. Roll
Kalibrasi roll merupakan kalibrasi yang digunakan untuk mengkoreksi gerakan oleng kapal pada arah sumbu-x seperti yang diperlihatkan pada Gambar I.7. Persamaan untuk kalibrasi roll dapat dilihat pada persamaan I.5.
(I.5) adalah offset roll, x adalah panjang jalur dalam meter, dan y adalah kedalaman.
c. Pitch
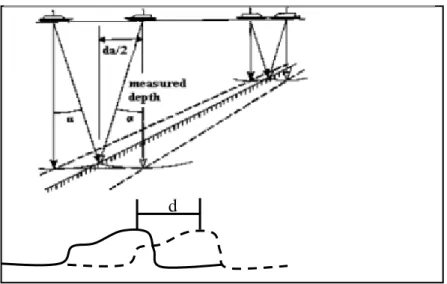
Kalibrasi ini dilakukan dengan tujuan untuk mencari besarnya nilai koefisien koreksi anggukan kapal (pada arah sumbu y) dan time delay sehingga kedalaman yang terukur menjadi akurat. Geometri seperti Gambar I.8 digunakan untuk mengilustrasikan persamaan pitch pada persamaan I.6.
dα = tan-1
(I.6) = sudut pancaran
z = kedalaman
d = jarak antar daerah curam pengukuran pertama dan kedua. Gambar I. 7 Kesalahan roll (Godin, 1998)
d. Yaw
Kalibrasi yaw adalah kalibrasi yang diakibatkan keadaan pada saat survei dilaksanakan diliputi arus kencang sehingga dapat mengubah arah heading kapal di sepanjang jalur survei.
3. Kalibrasi Kecepatan Rambat Akustik
Adanya perbedaan parameter seperti salinitas, suhu dan tekanan di setiap kolom air laut mengakibatkan adanya perbedaan kecepatan rambat akustik di setiap kolom tersebut. Untuk itu dilakukan pengukuran kecepatan rambat akustik menggunakan alat Sound Velocity Profiler (SVP) atau menggunakan CTD (Conductivity
Temperature and Depth).
4. Kalibrasi Gyro
Kalibrasi gyro bertujuan untuk mengkoreksi adanya kesalahan sistematik dari alat kompas giro (gyrocompass) serta untuk mengkoreksi penyimpangan haluan kapal (Sasmita, 2008).
5. Performance Test
Performance Test adalah suatu cek dari offset-offset tersebut untuk memverifikasi
apakah data sesuai dengan persyaratan-persyaratan ketelitian untuk survei. Uji ini adalah sangat utama suatu survei yang kecil melewati suatu bidang yang datar di dalam kedalaman air tidak lebih dari 30 meter. Empat garis sejajar adalah sesuai dengan sedikitnya 150 persen overlap. Prosedur ini harus dilaksanakan untuk
Gambar I. 8 Kesalahan pitch (Godin, 1998) d
memastikan data bersih dari kesalahan kalibrasi dan nilai kalibrasi sudah harus dapat digunakan untuk memperoleh nilai-nilai pengukuran yang dapat dipercaya ( Mann, 1998 dalam Sasmita, 2008).
I.8.3 Pasang Surut
Pengamatan pasang surut dilakukan untuk mendapatkan data tinggi muka air laut disuatu lokasi. Dengan adanya data tinggi muka air tersebut, maka dapat ditentukan datum vertikal yang akan digunakan sebagai referensi tinggi nol pemeruman. Karena posisi dari muka air laut yang selalu berubah-ubah, maka penentuan tinggi nol harus dilakukan dengan merata-ratakan data tinggi muka air laut yang diamati dalam rentang waktu dan interval pengambilan data. Pengamatan pasang surut untuk keperluan praktis dapat dilakukan selama 15 atau 29 hari (Djunarsjah, 2005). Pengamatan pasut dapat dilakukan dengan menggunakan alat pengamat pasut seperti rambu pasut, tide gauge, radar gauge ataupun alat pengamat pasut lainnya. Contoh peralatan pengamatan pasang surut dapat dilihat pada Gambar I.9.
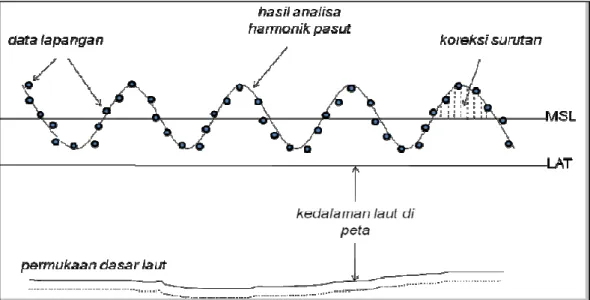
I.8.4 Reduksi Kedalaman
Reduksi kedalaman dimaksudkan untuk melakukan koreksi terhadap nilai kedalaman yang terukur untuk kemudian direfrensikan terhadap bidang referensi kedalaman yang ditentukan dengan pengamatan pasang surut. Pengamatan pasang Gambar I. 9 Radar gauge untuk pengamatan pasang surut ( woodworth, 2003 )
surut (pasut) bertujuan untuk mencatat atau merekam gerakan vertikal permukaan air laut yang terjadi secara periodik yang disebabkan tarik-menarik antara bumi dengan benda-benda angkasa terutama bulan dan matahari (Djunarsjah, 2005). Dengan melakukan pengamatan permukaan air laut sesaat selama periode tertentu maka akan dapat menentukan bidang referensi kedalaman (datum vertikal). Bidang referensi kedalaman yang sering digunakan yaitu muka laut rerata yang dikenal dengan Mean
Sea Level (MSL), Lowest Astronomical Tide (LAT) yang merupakan kondisi
permukaan laut terendah, dan bidang referensi vertikal lainnya. Koreksi surutan ini dapat dilihat pada Gambar I.10.
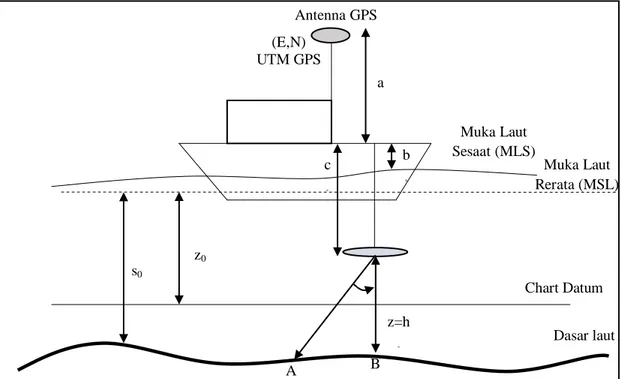
I.8.4.1. Reduksi kedalaman multibeam echosounder. Titik kedalaman pada dasar laut yang ditentukan pada MBES bergantung terhadap draft transducer (c-b), reduksi pasut, beda fase ( yang mempengaruhi kedalaman dengan resolusi sudut beam ( tertentu (Sasmita,2008). Gambar reduksi kedalaman untuk MBES dapat dilihat pada Gambar I.11.
Keterangan:
Posisi kapal secara global didapat dari GPS yaitu (Easting, Northing), kemudian diukur offset static antara transducer atau MRU dalam hal ini terhadap kapal maupun antena GPS serta muka air laut sesaat (a, b, c) sehingga didapat draft
transducer yaitu= c-b. Titik kedalaman pada dasar laut yang ditentukan pada MBES
bergantung terhadap draft transducer (c-b), reduksi pasut, beda fase ( yang mempengaruhi kedalaman dengan resolusi sudut beam ( tertentu (Sasmita,2008). Kedalaman terkoreksi (h koreksi) dapat ditentukan dengan persamaan I.7.
hkoreksi= h + (c-b)- (Z0)………..(I.7)
Dimana h merupakan kedalaman hasil pengukuran, c-b merupakan nilai besaran dari draft transducer, dan Z0 nilai besaran koreksi pasang surut (surutan).
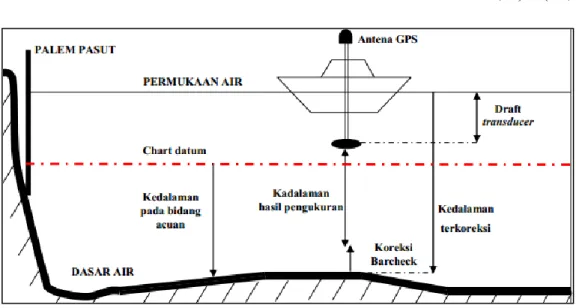
I.8.4.2. Reduksi kedalaman singlebeam echosounder. Titik kedalaman yang diukur menggunakan SBES perlu dilakukan koreksi untuk mendapatkan nilai kedalaman terkoreksi yaitu nilai kedalaman yang telah direfrensikan terhadap suatu bidang refrensi kedalaman yang telah ditentukan melalui pengamatan pasut. Untuk
Gambar I. 11 Reduksi kedalaman laut (Sasmita,2008)
Muka Laut Sesaat (MLS) Dasar laut Chart Datum Muka Laut Rerata (MSL) a b a c a z0 s0 z=h a Antenna GPS (E,N) UTM GPS A B
mendapatkan data kedalaman yang terkoreksi maka perlu mempertimbangkan koreksi tinggi muka air saat dilakukan pemeruman, koreksi draft transducer dan koreksi barchek. (Septiyadi, 2013). Reduksi kedalaman dapat dilihat pada Gambar I.12 dimana koreksi untuk reduksi kedalaman tersebut dapat dijelaskan pada persamaan I.8.
H terkoreksi = H echosounder + draft transducer + koreksi barchek – (Z0)…(I.8)
I.8.5 Penentuan Posisi Titik Pengukuran Kedalaman Fixed Perum
Penentuan posisi titik kedalaman dalam survei hidrografi khususnya untuk pekerjaan pemetaan laut merupakan peran yang sangat penting. Penentuan koordinat horizontal titik di laut untuk keperluan survei hidrografi pada dasarnya sama saja dengan survei topografi di darat. Perbedaan yang nyata adalah titik yang diamat di laut tidak dapat diam, tetapi target selalu dalam keadaan bergerak.
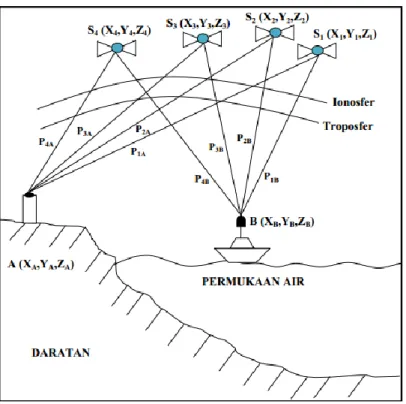
Ada beberapa metode dalam penentuan posisi horizontal (X,Y) titik-titik kedalaman. Salah satunya dengan gelombang elektromagnetik (satellite receiver) yaitu dengan menggunakan satelit GPS yang dipasang pada kapal survei. Metode yang digunakan dapat berupa metode GPS absolute maupun metode differential GPS (Poerbandono, dkk., 2005).
Metode pengamatan Differential Global Positioning Sistem (DGPS) diperlukan minimum dua receiver GPS yaitu di stasiun acuan dan lainnya di stasiun pengamat. Stasiun acuan adalah yang telah diketahui koordinatnya sedangkan stasiun
pengamat adalah stasiun yang akan ditentukan posisinya dengan DGPS. Alat yang digunakan DGPS C-Nav, dimana titik referensi yang digunakan secara otomatis dari stasiun referensi yang digunakan. Metode DGPS ini dapat diligat pada Gambar I.13.
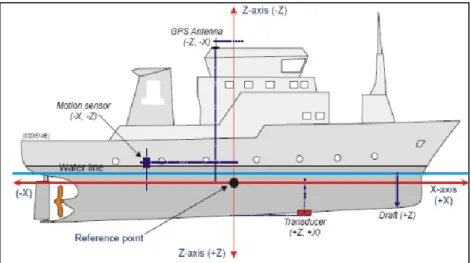
Sistem koordinat kapal seperti yang terdapat pada Gambar I.14, digambarkan menggunakan sistem yang saling tegak lurus (siku-siku) yang dibentuk oleh sumbu X, Y, dan Z. Untuk membuat sistem koordinat transducer relatif terhadap posisi kapal, maka pusat sistem koordinat kapal adalah salib sumbu antara kapal (heading) sebagai sumbu X, serta arah tegak lurus kearah dasar laut sebagai sumbu Z.
Ketentuan
Penentukan posisi transducer yang terletak pada kapal maka transducer tersebut diikatkan dengan hasil pengukuran yang dilakukan oleh sensor antena GPS di kapal. Berdasarkan sistem koordinat kapal ini, maka gerakan kapal dapat dinyatakan gerak rotasi terhadap sumbu-sumbu sistem koordinat kapal. Demikian pula posisi titik-titik kedalaman yang diperoleh dari hasil pengukuran dengan alat MBES dapat ditentukan (Sasmita, 2008).
Standarisasi yang dijadikan acuan terbaru dalam penentuan posisi telah diterbitkan oleh IHO yaitu IHO SP-44 tahun 2008, seperti yang terlampir pada Tabel I.1.
Tabel I. 1 Standarisasi Penentuan Posisi
Orde Spesial 1a 1b 2
Posisi titik kedalaman 2 m 5 m + 5% kedalaman
5 m + 5% kedalaman
20 m + 10% Kedalaman Posisi alat bantu
navigasi tetap dan fitur penting bagi navigasi
2 m 2 m 2 m 2 m
Posisi garis pantai dan fitur yang kurang penting bagi navigasi
10 m 20 m 20 m 20 m
Posisi alat bantu navigasi apung
10 m 10 m 10 m 20 m
I.8.6 Orde Ketelitian Survei Hidrografi
Menurut standar teknis pelaksanaan survei hidrografi terdapat klasifikasi derajat ketelitian yang dibedakan menjadi beberapa orde ketelitian sebagai berikut (SNI 74646, 2010):
a. Orde khusus
Orde khusus survei hidrografi mendekati standar ketelitian survei rekayasa dan digunakan secara terbatas di daerah-daerah kritis dimana kedalaman di bawah laut sangat minim dan di dalam hal ini karakteristik dasar airnya berpotensi membahayakan kapal. Daerah-daerah kritis tersebut ditentukan secara langsung oleh instansi yang bertanggung jawab di dalam masalah kualitas survei. Sebagai contoh ialah pelabuhan-pelabuhan tempat sandar dan alur masuknya. Semua sumber kesalahan harus dibuat minimal.
Orde khusus memerlukan penggunaan yang berkaitan dengan side scan sonar,
multi transducer arrays atau multibeam echosounder dengan resolusi tinggi dengan
jarak antar lajur perum yang rapat untuk mendapatkan gambaran dasar air 100%. Harus pula diyakinkan bahwa setiap benda dengan ukuran lebih besar dari 1 meter persegi dapat terlihat oleh peralatan perum yang digunakan. Penggunaan side scan
sonar dan MBES mungkin diperlukan di daerah-daerah di dalam hal ini benda-benda
kecil dan rintangan bahaya mungkin ditemukan atau survei untuk keperluan investigasi.
b. Orde satu
Orde satu survei hidrografi diperuntukkan bagi pelabuhan-pelabuhan, alur pendekat, haluan yang dianjurkan, alur navigasi dan daerah pantai dengan lalu lintas komersial yang padat di dalam hal ini kedalaman di bawah laut memiliki luas cukup memadai dan kondisi geofisik dasar lautnya tidak begitu membahayakan kapal (misalnya lumpur atau pasir). Survei orde satu berlaku di daerah dengan kedalaman kurang dari 100 meter. Meskipun persyaratan pemeriksaan dasar laut tidak begitu ketat jika dibandingkan orde khusus, namun pemeriksaan dasar laut secara menyeluruh tetap diperlukan di daerah-daerah di dalam hal ini karakteristik dasar laut dan resiko adanya rintangan berpotensi membahayakan kapal. Pada daerah-daerah yang diteliti tersebut, harus diyakinkan bahwa untuk kedalaman sampai dengan 40 meter benda-benda dengan ukuran lebih besar dari 2 meter persegi, atau
pada kedalaman lebih dari 40 meter, benda-benda dengan ukuran 10% dari kedalaman harus dapat digambarkan oleh peralatan perum yang digunakan.
c. Orde dua
Orde dua survei hidrografi diperuntukkan di daerah dengan kedalaman kurang dari 200 meter yang tidak termasuk di dalam orde khusus maupun orde satu, dan di dalam hal ini gambaran batimetri secara umum sudah mencukupi untuk meyakinkan bahwa tidak terdapat rintangan di dasar laut yang akan membahayakan tipe kapal yang lewat atau bekerja di daerah tersebut. Hal ini merupakan kriteria yang penggunaannya di bidang kelautan, sangat beraneka ragam, di dalam hal ini orde hidrografi yang lebih tinggi tidak dapat diberlakukan. Pemeriksaan dasar laut mungkin diperlukan pada daerah-daerah di dalam hal ini karakteristik dasar air dan resiko adanya rintangan berpotensi membahayakan kapal.
d. Orde tiga
Orde tiga survei hidrografi diperuntukkan untuk semua area yang tidak tercakup oleh orde khusus, orde satu dan dua pada kedalaman lebih besar dari 200 meter.
Orde ketelitian survei di atas merupakan rujukan dari SNI 7646:2010 yang mengacu pada IHO SP-44 edisi ke 4 tahun 1998 dan IHO SP-32 edisi ke 5 tahun 1994. Sedangkan IHO telah menerbitkan IHO Standards Of Hydrographics Surveys terbaru yaitu IHO SP-44 edisi ke 5 tahun 2008. IHO SP-44 tahun 2008 diterbitkan karena munculnya teknologi multibeam dan LIDAR (Anonim, 2008). Oleh karena itu terdapat pembaharuan pada pembagian orde ketelitian survei yaitu menjadi orde khusus, 1a, 1b, dan 2.
Perubahan mendasar yang terdapat pada IHO edisi ke 5 tahun 2008 adalah pada orde 1a pencarian dasar laut secara penuh diperlukan dan pada orde 1b tidak diperlukan. Kemudian terjadi penghapusan orde 3 karena dianggap sama dengan orde 2 (IHO SP-44 edisi ke 5 tahun 2008).
I.8.7 Lajur Pemeruman
Berdasarkan fungsinya lajur pemeruman dapat diklasifikasikan menjadi tiga macam yaitu lajur utama, lajur silang, dan lajur tambahan/investigasi.
I.8.7.1. Lajur perum utama. Lajur perum utama adalah lajur perum yang direncanakan sedemikian rupa sehingga seluruh daerah survei dapat tercakup dan dapat tergambarkan dasar perairannya (Soeprapto, 2001). Lajur perum utama dibuat sedemikian rupa sehingga dapat tegak lurus garis kontur dari garis pantai atau mendekatinya.
I.8.7.2. Lajur perum silang. Lajur perum silang adalah lajur perum yang dibuat memotong lajur perum utama. Lajur silang dibuat untuk melakukan kontrol kualitas terhadap nilai kedalaman yang didapat dari lajur utama. Cara penentuan lajur silang yaitu lajur silang harus memotong lajur perum utama dengan sudut lebih besar dari 450diusahakan mendekati 900. Pada umumnya jarak antara lajur perum silang tidak lebih dari 10 kali jarak antara lajur perum utama (anonim, 2010). Ilustrasi lajur utama dan lajur silang dapat dilihat pada Gambar I.15.
I.8.7.3. Lajur perum tambahan/investigasi. Lajur perum tambahan/investigasi dibuat jika terjadi hal-hal diluar perencanaan misalnya adanya perubahan kedalaman yang terlalu signifikan, pusaran arus, atau mengisi gap akibat penyimpangan pengambilan data pada lajur utama yang terdapat antara dua lajur yang bersebelahan pada sistem lajur perum utama (Soeprapto, 2001).
I.8.8 Uji Kualitas Hasil Titik Pengukuran Kedalaman Fixed Perum
Setiap pengukuran kedalaman, sering kali nilai kedalaman yang diberikan bukan merupakan nilai kedalaman yang sebenarnya akan tetapi dapat berupa outlier seperti yang dijelaskan pada Gambar I.16, sehingga diperlukan suatu uji kualitas untuk dapat menghilangkannya. Acuan yang digunakan untuk menentukan batas toleransi kesalahan nilai beda kedalaman yaitu IHO SP 44 tahun 2008 dan SNI 7646-2010 dengan tingkat kepercayaan 95%. Adapun persamaan yang digunakan untuk menghitung batas toleransi tersebut dapat dilihat pada persamaan I.9 :
± ……….(I.9)
Keterangan :
a : kesalahan independen
b : faktor kesalahan kedalaman yang dependen d : kedalaman rata-rata
(bxd) : kesalahan kedalaman yang dependen (jumlah semua kesalahan kedalaman yang dependen).
Nilai a dan b dalam persamaan 1.9 tersebut disesuaikan dengan orde survei yang dilakukan seperti yang tercantum pada Tabel I.2 menurut IHO SP-44 Tahun 2008.
Tabel I. 2 Standar Ketelitian Kedalaman
Orde Spesial 1a 1b 2 Konstanta a=0.025m b=0.075m a=0.5m b=0.013m a=0.5m b=0.013m a=1.0 m b=0.023m Uji kualitas dilakukan dengan terlebih dahulu mengansumsikan bahwa Hlu (kedalaman lajur utama) nilainya sama dengan Hls (kedalaman lajur silang) yang saling berhimpit (berada pada posisi x dan y yang sama). Lebih lanjut disajikan pada persamaan (I.10) sampai dengan persamaan (I.13) (Widjajanti, 2011) seperti berikut :
a. Hlu = Hls = H……...………..….….……....(I.10) b. μU – μS = δ……...………...……….………...(I.11) c. Mean error : H= Ʃ(𝐻𝑙𝑢−𝐻𝑙𝑠)……...………...……….…………...…………...(I.12) d. Standard deviation : = ± ……...……...……..…………...…………...(I.13) Keterangan :
Hlu : kedalaman lajur utama Hls : kedalaman lajur silang
H : Nilai true value (beda kedalaman yang sebenarnya = 0) Hi : Beda nilai kedalaman lajur utama dan lajur silang
: Standar deviasi δ : Selisih kedalaman
Uji kualitas ini dilanjutkan dengan menghitung nilai kesalahan data beda kedalaman dengan tingkat kepercayaan 95% yang mengacu pada IHO SP-44 tahun 2008 yaitu sebesar 1,96xσ. Jika nilai kesalahan data beda kedalaman masih dalam batas toleransi kedalaman yang diperoleh dengan persamaan I.10, maka kualitas sampel data kedalaman masuk dalam toleransi yang merujuk pada IHO SP-44 tahun 2008. Sedangkan jika nilai kesalahan data beda kedalaman diluar batas toleransi kedalaman, maka kualitas sampel data kedalaman tidak masuk dalam toleransi.
I.8.9 Uji Perbandingan Hasil Data Multibeam dan Singlebeam Echosouder
Uji perbandingan antara data MBES dan SBES dilakukan dengan uji statistik menggunakan uji Z. Pemilihan uji statistik menggunakan uji Z ini dikarenakan jumlah sampel penelitian yang dapat dikategorikan sebagai sampel besar (>30). Pada tahap uji perbandingan ini, data hasil pengukuran batimetri menggunakan alat
multibeam echosounder dengan data kedalaman dari singlebeam echosounder
dengan melihat nilai mean error, standard deviation, dan nilai Zo dari keseluruhan sampel data kedalaman. Adapun persamaan untuk menghitung nilai dari mean error,
standard deviation, dan nilai Zo terdapat pada persamaan (I.12), (I.13), (I.14) dan
(I.15).
Uji perbandingan data kedalaman ini menggunakan uji statisitik sampling besar dengan sampel berpasangan dengan menggunakan tabel Z. Berdasarkan hasil Zo dapat diketahui apakah data kedalaman hasil pengukuran masuk dalam toleransi atau tidak dengan tingkat kepercayaan 95% (±1,96).
Z0 = ...(I.14) dimana, ...(I.15) Keterangan: X1 = Rata-Rata MBES X2 = Rata-Rata SBES
= Varian Sampel MBES = Varian Sampel SBES n1 = Jumlah Sampel MBES
n2 = Jumlah Sampel SBES
Hipotesis :
a. Ho ; μ1 = μ2 atau μ1 - μ2 = δ b. HI ; μ1 ≠ μ2 atau μ1 - μ2 ≠ δ
Sehingga :
a. Ho ditolak, jika zo > +1,96 atau zo < -1,96 b. Ho diterima, jika zo -1,96 < zo < +1,96 Keterangan :
H : Nilai true value (beda kedalaman = 0)
Hi : Beda nilai kedalaman hasil pengukuran multibeam echosounder dan data titik kedalaman singlebeam echosounder
δ : Selisih kedalaman
IX. I.9 Hipotesis
Berdasarkan pada tinjauan pustaka dari penelitian sejenis dan merujuk pada teori yang ada maka hipotesis dari penelitian ini yaitu:
1. Uji kualitas data hasil pengukuran SBES sesuai dengan standar IHO SP-44 edisi ke 5 dengan tingkat kepercayaan 95 %.
2. Uji Perbandingan data batimetri yang dihasilkan dari pengukuran menggunakan multibeam echosounder dengan singlebeam echosounder pada posisi titik perum yang sama akan memberikan nilai kedalaman (H) yang berbeda (selisih nilai kedalaman tidak sama dengan 0), namun perbedaan nilai kedalaman yang didapat kedua alat ini secara statistik tidak berbeda signifikan untuk tingkat kepercayaan 95%.
3. Apabila hasil uji kualitas data SBES memenuhi toleransi dan uji perbandingan SBES dan MBES tidak berbeda secara signifikan maka dapat diartikan juga bahwa data MBES akan sesuai atau masuk toleransi IHO SP-44 edisi ke 5 tahun 2008.