PENGUKURAN SINYAL GETARAN PADA MESIN
BUBUT GALLIC 16N DENGAN MENGGUNAKAN
MULTYCHANNEL SPECTRUM ANALYZER
Hendra
(1)(1)
Staf Pengajar Universitas Bengkulu
ABSTRACT
Design of machine tools is the high stiffness. Stiffness of machine tools is the static and dynamic. Static of stiffness relevance is the deflection and dynamic of stiffness is the dynamic characteristic of machine tools example natural frequency and mode shape. Measurement of dynamic of characteristic can be used MSA (multi channel of spectrum analyzer). MSA can be known to dynamic characteristic. Result the research as natural frequency machine tools and mode shape.
Keywords: Machine Tool, Natural frekuensi, FRF, MSA
1. PENDAHULUAN
Mesin perkakas dirancang dengan menggunakan konsep high speed dan high power. Konsep ini menuntut rancangan mesin perkakas harus memiliki kekakuan yang tinggi. Kekakuan tinggi ini digunakan untuk meredam getaran yang muncul pada waktu pengoperasian mesin perkakas. Kekakuan tinggi biasanya diikuti dengan volume rancangan mesin
perkakas yang besar. Hal ini sangat merugikan
karena volume rancangan yang besar membutuhkan jumlah material yang besar juga. Untuk itu dirancang sistem kekakuan mesin perkakas yang lebih kaku dengan menggunakan ribbing. Sehingga getaran mesin perkakas dapat diredam oleh mesin perkakas yang memiliki kekakuan tinggi tapi volumenya tidak besar.
Efek getaran yang muncul pada mesin perkakas sangat besar pengaruhnya. Itu dapat dilihat pada produk yang dihasilkan, umur pahat dan umur mesin perkakas yang digunakan. Getaran yang tinggi akan mengakibatkan kualitas benda kerja menjadi kurang bagus, umur pahat menjadi rendah dan mesin tidak tahan lama.
Untuk mengetahui level getaran pada mesin perkakas dilakukan pengujian dengan menggunakan mesin perkakasnya yaitu mesin bubut. Pengujian dilakukan dengan menggunakan mesin bubut Gallic 16N dan
penganalisis sinyal getaran (MSA/Multichannel
Spectrum Analyzer). MSA dapat menganalisis sinyal
getaran mesin perkakas seperti frekuensi pribadi, bentuk modus getar dan redaman mesin perkakas. Penelitian ini dilakukan untuk melihat pengaruh level getaran pada mesin perkakas. Besarnya getaran yang
terjadi diukur dengan menggunakan perangkat
penganalisis sinyal getaran yaitu MSA (Multichannel
Spectrum Analyzer). Dari MSA diperoleh
karakteristik dinamik mesin perkakas seperti
frekuensi pribadi, modus getar dan redaman mesin perkakas.
Dengan mengetahui frekuensi pribadi, modus getar dan redaman dapat dirancang kekakuan mesin perkakas yang mampu menahan pengaruh getaran akibat gaya pemotongan besar.
Mesin perkakas dirancang dengan memperhatikan aspek kekakuan statik dan dinamik. Misalnya ditinjau dari aspek kekakuan dinamik yaitu deformasi relatif antara pahat dengan benda kerja dan getaran pada proses pemotongan. Masalah dinamik pada mesin perkakas berkaitan dengan getaran yang timbul karena adanya gaya eksitasi (getaran paksa), gaya eksitasi sesaat (getaran bebas) dan getaran karena adanya getaran eksitasi diri.
Getaran mesin perkakas berpengaruh terhadap mesin perkakas, kondisi pemotongan, getaran benda kerja dan umur pahat. Pengaruh getaran pada kondisi pemotongan dapat dilihat dari perubahan geram yang mana akibat perubahan gaya pemotongan juga menghasilkan perubahan geram.
2. TINJAUAN PUSTAKA Getaran Mesin Perkakas
Getaran ditandai oleh perubahan secara periodik dari suatu besaran. Getaran merupakan suatu fungsi periodik yang dinyatakan sebagai :
t
X
t
T
X
(1)dimana: t = waktu (s)
T = perioda getaran (s)
Frekuensi merupakan kebalikan dari perioda yaitu jumlah getaran per satuan waktu (Hz)[1]. Dalam prakteknya terdapat dua jenis getaran yaitu getaran bebas dan getaran paksa. Getaran bebas terjadi jika tidak ada gaya luar yang bekerja selama sistem tersebut bergetar dan getaran paksa terjadi jika ada
gaya luar yang bekerja selama sistem tersebut bergetar. Dalam proses pemotongan terdapat suatu getaran yaitu getaran eksitasi diri dimana getaran ini terjadi jika energi yang mengeksitasi berasal dari proses pemotongan itu sendiri. Getaran eksitasi diri dalam proses pemotongan tergantung diantaranya pada faktor kondisi pemotongan dan kekakuan sistem pemotongan.
Suatu sistem getaran bebas cenderung bergetar pada
frekuensi pribadinya. Frekuensi pribadi dapat
ditentukan dengan menggunakan persamaan getaran bebas yaitu : 0 kx x m (2) dimana: t j
e
A
x
t j e A x t j e A x2 dengan memasukkan ke dalam “Persamaan (2)” diperoleh:
2Aej t
k Aej t
0 m 0
2
m
k
Besar frekuensi pribadi adalah:
m k
(3)
Jumlah frekuensi pribadi suatu sistem tergantung pada derajat kebebasan sistem tersebut. Sistem getaran 1 derajat kebebasan (SDOF) memiliki 1 frekuensi pribadi dan sistem getaran banyak derajat
kebebasan (MDOF) memiliki banyak frekuensi
pribadi.
Sistem Getaran 1 Derajat Kebebasan (SDOF)
Sistem getaran 1 derajat kebebasan (SDOF) dapat dilihat pada “Gambar (1)”.
Gambar 1 Model sistem getaran satu derajat kebebasan[1]
Persamaan kesetimbangan gayanya adalah:
0
c
x
kx
x
m
(4)dimana m x adalah gaya inersia, cx(gaya redaman)
dan kx(gaya pegas). “Persamaan (7) merupakan
persamaan gerak differensial linier orde dua dengan koefisien yang konstan.
Kurva simpangan getaran terhadap waktu dari sistem getaran tak teredam dapat dilihat pada “Gambar (2)”.
x
T A
t
Gambar 2 Respon sistem getaran tak teredam [1]
Setiap sistem selalu memiliki redaman. Jika
persamaan
x
A
e
jt, j t e A x
dan t j e A x2 dimasukkan ke “Persamaan (7) akan
diperoleh persamaan karakteristik berikut:
2Aej t
c Aej t
k Aej t
0m (5) persamaan ini akan memiliki dua akar riil negatif (akar kompleks) tergantung pada besarnya harga c relatif terhadap nilai kritisnya yaitu:
km
c
c
2
(6)Rasio redamannya adalah:
km c c c c 2 (7)
sehingga besarnya frekuensi pribadi teredam adalah:
2
1
d n (8)Fungsi Respon Frekuensi
Fungsi respon frekuensi merupakan perbandingan antara sinyal keluaran dengan sinyal masukan dari
suatu sistem dalam domain frekuensi. Sinyal
masukannya berupa sinyal sinus. Ada tiga jenis fungsi respon frekuensi yaitu:
Receptance, responnya berupa perpindahan.
F x H
Mobility, responnya berupa kecepatan.
j H
F x Y
Inertance, responnya berupa percepatan.
H
F x
A 2 .
Fungsi respon frekuensi dapat diturunkan dari persamaan:
Xejt
c j Xej t
kXej t Fejt m2
n n j k c j m k F X 2 1 1 1 2 2 (9)dimana besar magnitude dan sudut fasa dari
“Persamaan (9)” adalah:
c j m k H 21 (10) 2 2 2 2 1 1 n n k 2 1 2 1 1 2 tan tan n n m k c (11)Fungsi respon frekuensi dapat diperoleh dengan mengukur spektrum frekuensi dari sinyal masukan dan sinyal keluaran.
Respon Getaran Mesin Bubut[1][2]
Sinyal hasil pengukuran getaran pada mesin bubut merupakan respon dari sinyal yang berasal baik dari mesin bubut maupun luar mesin bubut.
Untuk mengetahui bentuk sinyal dari suatu sumber getar biasanya dilakukan pengukuran dalam domain waktu, karena menggambarkan wujud asli dari sinyal getaran yang diukur. Sinyal dalam domain waktu pada sistem yang sederhana mudah dianalisis. Sinyal akan menjadi rumit dan sulit dianalisis apabila sinyal tersebut berasal dari suatu sistem yang kompleks. Domain frekuensi didapat dari teori Fourier yang menyatakan bahwa pada dasarnya setiap sinyal periodik merupakan hasil penjumlahan dari sinyal-sinyal sinus atau kosinus yang memiliki frekuensi berbeda-beda.
Koherensi didefinisikan sebagai normalisasi fungsi
korelasi silang dalam domain frekuensi yang
mempunyai ciri tidak berdimensi dan berharga
antara 0 dan 1, juga menunjukkan hubungan antara masukan dan keluaran yang merupakan fraksi dari spektrum daya. Apabila koherensi berada antara 0 dan satu berarti ada sinyal gangguan dari luar (noise) yang ikut terukur.
Koherensi dapat dinyatakan dengan rumus:
f G f G f G f yy xx yx 2 2 (12)dimana: Gxx(f) = spektrum daya diri dari sinyal
masukan x (t)
Gyy(f) = spektrum daya diri sinyal keluaran
y (t)
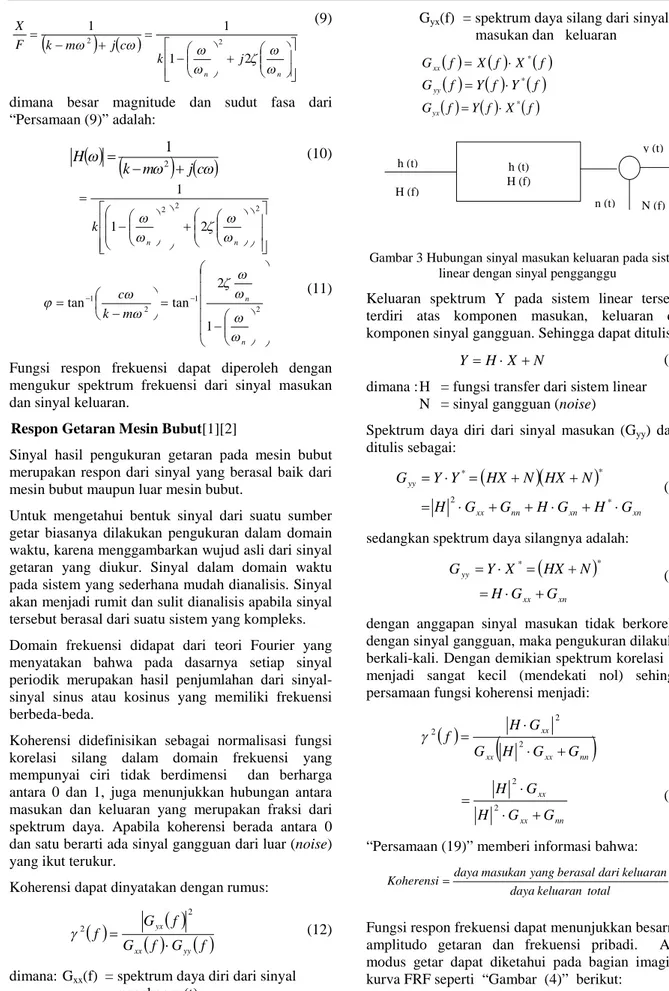
Gyx(f) = spektrum daya silang dari sinyal
masukan dan keluaran
f X
f X
f Gxx *
f Y
f Y f Gyy *
f Y f X
f Gyx * h (t) H (f) h (t) H (f) y (t) N (f) n (t)Gambar 3 Hubungan sinyal masukan keluaran pada sistem linear dengan sinyal pengganggu
Keluaran spektrum Y pada sistem linear tersebut
terdiri atas komponen masukan, keluaran dan
komponen sinyal gangguan. Sehingga dapat ditulis:
N X H
Y (13) dimana :H = fungsi transfer dari sistem linear
N = sinyal gangguan (noise)
Spektrum daya diri dari sinyal masukan (Gyy) dapat
ditulis sebagai:
xn xn nn xx yy G H G H G G H N HX N HX Y Y G * 2 * * (14)sedangkan spektrum daya silangnya adalah:
xn xx yy G G H N HX X Y G * * (15)dengan anggapan sinyal masukan tidak berkorelasi dengan sinyal gangguan, maka pengukuran dilakukan
berkali-kali. Dengan demikian spektrum korelasi Gxn
menjadi sangat kecil (mendekati nol) sehingga persamaan fungsi koherensi menjadi:
nn xx xx xx G G H G G H f 2 2 2 nn xx xx G G H G H 2 2 (16)“Persamaan (19)” memberi informasi bahwa:
total keluaran daya keluaran dari berasal yang masukan daya Koherensi
Fungsi respon frekuensi dapat menunjukkan besarnya
amplitudo getaran dan frekuensi pribadi. Arah
modus getar dapat diketahui pada bagian imaginer kurva FRF seperti “Gambar (4)” berikut:
Gambar 4 Cara menentukan modus getar
3. METODE PENELITIAN
Pengujian dilakukan dengan satu tahap. Disini dilakukan pengujian parameter dinamik. Pengujian ini merupakan pengukuran FRF (fungsi respon frekuensi) yang mana bertujuan untuk memperoleh
frekuensi pribadi, modus getar dan redaman.
Pengujian tahap kedua yaitu pengujian pemotongan
dilakukan untuk melihat hubungan kondisi
pemotongan dengan level getaran.
Pengujian parameter dinamik dilakukan dengan uji eksitasi langsung menggunakan exciter. Exciter diposisikan agar gaya eksitasinya searah dengan gaya pemotongan (P) dan respon getaran diukur searah gaya eksitasinya. Kondisi yang harus diperhatikan dalam pengujian yaitu:
1. Kondisi titik eksitasi sedekat mungkin dengan kondisi saat uji pemotongan.
2. Eksitasi searah dengan respon getaran yang akan diukur (arah vertical dan horizontal).
3. Pengukuran dilakukan dalam kondisi mesin perkakas tidak berfungsi atau diam.
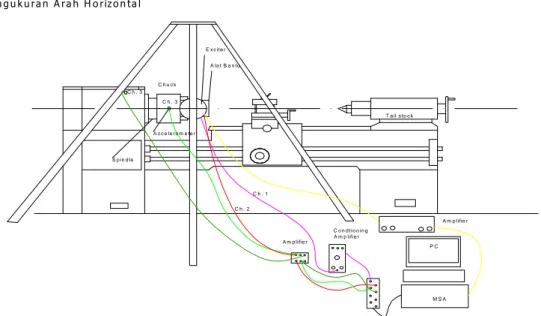
Set up peralatan pengujian dapat dilihat pada
”Gambar (5)”. Peralatan yang digunakan:
1. Multichannel spectrum analyzer berfungsi sebagai sumber sinyal eksitasi, penganalisis spectrum dan data akuisisi.
2. Loadcell berfungsi mengukur gaya eksitasi getaran. Spesifikasinya yaitu sensitifitas ref.
50 Hz, 230C:3.93 pC/N
3. Accelerometer berfungsi mengukur respon percepatan getaran.
4. Conditioning amplifier berfungsi untuk
mengkondisikan dan memperkuat sinyal dari
Loadcell.
5. Charge amplifier berfungsi untuk
memperkuat sinyal dari accelerometer.
Spesifikasinya yaitu sensitivitas tranducer
0,1-10,99 pC/ms2, sensitivitas amplifier
0,01-10 V/pC dan rentang frekuensi ukur 0,3-0,01-10 KHz.
6. Power amplifier berfungsi untuk memperkuat sinyal eksitasi dari MSA. Spesifikasinya adalah kapasitas output 180 VA, kapasitas tegangan output 12 V RMS, kapasitas arus output 7,5 A RMS untuk range dibawah 5 Hz, 15 A RMS untuk range 40 Hz - 10 KHz dan 12 A RMS untuk 15 KHz. Jangkauan frekuensi penuh 40 Hz – 10 KHz, kapasitas reduksi DC-100 KHz dan temperatur operasi 50C-400.
7. Permanent magnet vibration exciter berfungsi mengubah sinyal elektrik dari power amplifier menjadi getaran (gaya mekanik).
T a il s to c k P C C h . 2 C o n d tio n in g A m p lif ie r A m p lifie r M S A S p in d le E x c ite r A la t B a n tu C h u c k A c c e le r o m e te r C h . 3 C h . 1 C h . 3 A m p lifie r P e n g u k u ra n A ra h H o riz o n ta l
4. HASIL DAN PEMBAHASAN Pengujian Karakteristik Dinamik
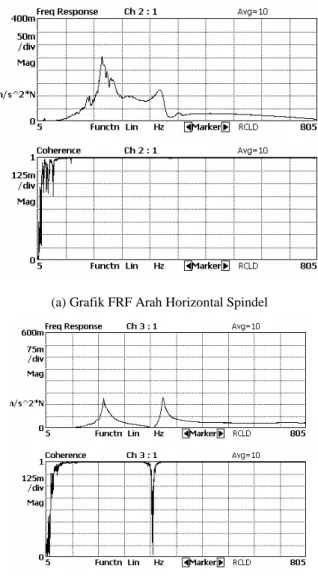
Pada ”Gambar (6)” diperlihatkan hasil pengukuran FRF dengan titik eksitasi pada spindel dan pahat arah vertikal dan horizontal. Kurva FRF menunjukkan frekuensi pribadi pada dudukan pahat dan spindel.
(a) Grafik FRF Arah Horizontal Spindel
(b) Grafik FRF Arah Vertikal Spindel Gambar 6 Kurva Karakteristik Dinamik
Gambar 7 Kurva Sinyal Getaran Pada Spindel Mesin Bubut Gallic 16N
Gambar 8 Arah modus getar pada mesin bubut gallic 16N
Dari hasil pengujian Mesin bubut Gallic memiliki frekuensi pribadi pada arah horizontal adalah 23,5 Hz, 43 Hz, 146 Hz, 188 Hz, 213 Hz dan 355 Hz. Pada arah vertikal adalah 180 Hz dan 364 Hz.
5. KESIMPULAN
Dari hasil pengujian menunjukkan bahwa:
1. Mesin bubut Gallic memiliki frekuensi pribadi pada arah horizontal adalah 23,5 Hz, 43 Hz, 146 Hz, 188 Hz, 213 Hz dan 355 Hz. Pada arah vertikal adalah 180 Hz dan 364 Hz.
2. Kegagalan proses pada penggunaan mesin
perkakas dapat dihindari dengan mengetahui
frekuensi pribadi mesin perkakas, sehingga
daerah kerja tidak berada pada daerah frekuensi pribadi mesin perkakas tersebut.
PUSTAKA
1. Paryana Puspa Putra,” Pengujian Gerakan
Untuk Analisis Kerusakan Elemen Rotasi pada Rumah Transmisi Mesin Bubut Celtic N14 Indonesia”, ITB, Bandung, 1990.
2. Trihono Sewoyo, “ Kaji Teoritik Sistem Getaran
Mekanik Redaman Tak Sebanding’, ITB, Bandung, 1990
3. Nunang Hidayat, “Pengkajian Chatter Proses
Bubut Muka pada Mesin CNC”, Institut Teknologi Bandung, Bandung, 1993.
4. Ewin, DJ, “Modal Testing-Theory and Practice”,
Bruel&Kjaer, Research Studies Press Ltd,
Letchwoot, 1986.
5. Mc. Connel, K.G, “Vibration Testing, Theory
and Practice”, by Jhon Willey&Sons, Inc, 1995.
6. Rivalino,” Pengujian FRF”, Institut Teknologi Bandung, Bandung, 2000.
7. Rochim, Taufiq, “ Teori dan Teknologi Proses Pemesinan, Lab. Teknik Produksi dan Metrologi Industri”, Institut Teknologi Bandung.
8. Koenigsberger, F,J. Tlusty,” Machine Tools
Structure”, Vol.1, Pergamon Press Ltd, New
9. Lab. Dinamika Struktur, PAU-IR ITB,” Diktat
Kursus Singkat Getaran Pemesinan Tingkat Dasar”, Bandung, 1993.
10. Lab. Dinamika Struktur, PAU-IR ITB,” Diktat
Kursus Singkat Getaran Pemesinan Tingkat Lanjut”, Bandung, 1993.
Curriculum Vitae:
Hendra S.T., M.T., N.I.P: 132 306 384, adalah Staf Pengajar Program Studi Teknik Mesin Universitas Bengkulu. Pendidikan Sarjana Teknik Universitas Andalas Padang dan Magister Teknik Mesin Bidang Teknik Produksi Departemen Teknik Mesin Fakultas
![Gambar 1 Model sistem getaran satu derajat kebebasan[1]](https://thumb-ap.123doks.com/thumbv2/123dok/4651210.3407179/2.892.133.773.190.1131/gambar-model-sistem-getaran-satu-derajat-kebebasan.webp)