RIA SUSILIAWATI
G54104014
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
BOGOR
2009
RIA SUSILIAWATI. Mathematical review of the macroscopic and microscopic models of traffic flow. Supervised by TONI BAKHTIAR and ALI KUSNANTO.
Traffic flow phenomenon can be described through mathematical model such as continuous dynamic model with an ordinary differential equation so that it can be solved with integral factors. In this paper three simple models of traffic flow are discussed, i.e, two macroscopic and one microscopic models. Macroscopic model formulates dynamics of the traffic flow that occurs on a large number of vehicles on a road. While the microscopic model explains drivers’ behavior in their interaction with other vehicles ahead, i.e, car-following model.
This paper shows the existence of ordinary differential equation found in the traffic flow model and indicates some different representations in the context of the same model. It also reviews a simple model of traffic flow along a single link, which leads to some unexpected results, i.e, it can express the solution model in term of link outflows as well as trip time. In the microscopic model, simulation is done to illustrate the behavior of the drivers with a sensitivity coefficient as a benchmark parameter.
RIA SUSILIAWATI. Tinjauan Matematis pada Model Makroskopik dan Mikroskopik Arus Lalu-lintas. Dibimbing oleh TONI BAKHTIAR dan ALI KUSNANTO.
Arus Lalu-lintas merupakan salah satu fenomena yang dapat dideskripsikan melalui pemodelan matematika sebagai model dinamik kontinu dengan sebuah persamaan diferensial biasa sehingga dapat diselesaikan dengan faktor pengintegralan.
Pada karya tulis ini tiga model sederhana untuk arus lalu-lintas didiskusikan, yaitu dua model makroskopik dan satu model mikroskopik. Model makroskopik memformulasikan dinamika-dinamika arus lalu-lintas yang terjadi pada sejumlah besar kendaraan pada suatu ruas jalan. Sedangkan model mikroskopik, mempelajari perilaku pengemudi dalam berinteraksi dengan kendaraan lain di depannya seperti model mobil pengikut.
Dalam tulisan ini ditunjukkan bahwa sebuah persamaan diferensial biasa terdapat pada model arus lalu-lintas dan menunjukkan adanya representasi yang berbeda pada konteks pemodelan yang sama. Tulisan ini juga meninjau model arus lalu-lintas sederhana pada jalan satu arah, yang menunjukkan beberapa hasil di luar dugaan, yaitu dapat menyatakan solusi model ke dalam solusi arus keluar dan solusi waktu tempuh. Pada model mikroskopik, simulasi dilakukan untuk mengetahui gambaran perilaku pengemudi dengan sebuah koefisien sensitifitas sebagai parameter pembanding.
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Sains
pada Fakultas Matematika dan Ilmu Pengetahuan Alam
Institut Pertanian Bogor
Oleh :
RIA SUSILIAWATI
G54104014
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
BOGOR
2009
NRP :
G54104014
Menyetujui:
Pembimbing I,
Pembimbing II,
Dr. Toni Bakhtiar, M.Sc.
NIP. 132158750
Drs. Ali Kusnanto, M.Si.
NIP. 131913135
Mengetahui:
Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam
Institut Pertanian Bogor
Dr. drh. Hasim, DEA
NIP. 131 578 806
hidayah-Nya sehingga penulis dapat menyelesaikan karya ilmiah ini dengan judul Tinjauan Matematis pada Model Makroskopik dan Mikroskopik Arus Lalu-lintas. Karya ilmiah ini merupakan syarat untuk memperoleh gelar Sarjana Sains pada Departemen Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam.
Dengan kerendahan hati penulis mengucapkan terimakasih yang sebesar-besarnya kepada semua pihak yang telah membantu dalam menyelesaikan karya ilmiah ini, yaitu kepada:
1. Yang terhormat Bapak Dr. Toni Bakhtiar, M.Sc selaku dosen pembimbing I dan Yang terhormat Bapak Drs. Ali Kusnanto, M.Si selaku dosen pembimbing II yang telah memberikan bimbingan, arahan, nasehat serta motivasi kepada penulis.
2. Yang terhormat Ibu Dr. Ir. Endar Hasafah Nugrahani, MS atas kesediaannya menjadi moderator dalam seminar sekaligus menjadi dosen penguji. Semua saran dan kritik beliau adalah hal yang berharga dalam penyempurnaan karya ilmiah ini.
3. Terimakasih kepada Darwisah ‘41 , Arief Indaka ‘42, dan Nurfitriana Oktaviani. S ’44 yang telah bersedia menjadi pembahas dalam seminar tugas akhir penulis.
4. Orang tua penulis yang tercinta, yaitu Sukin (Papa) dan Suhanah (Mama) atas segala doa, restu, usaha, pengorbanan, serta curahan kasih sayang yang telah diberikan hingga saat ini. Untuk adik penulis, Herna Sugiarti serta keluarga besar penulis. Kasih sayang dan dukungan mereka sangat berarti dalam penyelesaian karya ilmiah ini.
5. Sahabat-sahabatQ: Wieke, Echi, Rina (Kipli), Enyon, Alfredho dan Mora atas persahabatan yang terjalin. Terima kasih untuk Mora yang telah bersedia membantu menerjemahkan. Terimakasih untuk Jali, Echie, Rite, Uwie, Maryam, dan K’Hasby atas dorongan semangat dan masukan-masukan yang telah diberikan. Terima kasih juga untuk Fariz (Cocom) selaku Komti Mate’41.
6. Seluruh penghuni Perwira 41, penghuni Wisma Lukita Balebak, teman-teman Matematika 41, kakak-kakak kelas dan adik-adik kelas lainnya yang tidak dapat penulis sebutkan satu persatu. Kalian semua adalah teman yang telah dan akan selalu mengisi hari-hari penulis, terima kasih atas kebersamaannya.
7. Dosen-dosen di Departemen Matematika, terima kasih atas ilmu yang telah Bapak dan Ibu berikan, serta staf Departemen Matematika: Ibu Susi selaku Ibuku di Kampus , Ibu Ade, K’ Ari, Mas Deny, Mas Heri, Mas Yono, Mas Bono, Bu Marisi, dan Mba Yanti terima kasih atas bantuan selama di Departemen Matematika.
8. Semua pihak yang ikut membantu dan dukungan semangat yang tidak dapat penulis sebutkan satu persatu.
Penulisan karya ilmiah ini tidak mungkin luput dari kekurangan, oleh karena itu kritik dan saran dari semua pihak akan sangat membantu demi kesempurnaan penulisan ini. Harapan penulis adalah semoga penulisan karya ilmiah ini dapat bermanfaat bagi penulis dan bagi para pembacanya atau pihak lain yang membutuhkan.
Bogor, Februari 2009
Ria Susiliawati
anak pertama dari dua bersaudara, dari pasangan Sukin dan Suhanah yang bertempat tinggal di Perumahan Padang Golf Asri Blok E.4.No.10, Cilegon, Banten.
Pada tahun 1991 penulis memulai pendidikan di Taman Kanak-kanak YPWKS I. Penulis menamatkan sekolah dasar di SD Negeri Kotasari pada tahun 1998, kemudian melanjutkan pendidikan ke SLTP Negeri 3 Cilegon pada tahun yang sama. Setelahnya penulis diterima di SMU Negeri 1 Cilegon untuk melanjutkan pendidikannya dan lulus pada tahun 2004. Pada tahun 2004 penulis melanjutkan pendidikannya ke Institut Pertanian Bogor (IPB). Penulis berhasil masuk IPB melalui jalur USMI (Undangan Seleksi Masuk IPB) dan diterima sebagai Mahasiswi Program Studi Matematika pada Fakultas Matematika dan Ilmu Pengetahuan Alam angkatan 41.
Selama menjalani masa perkuliahan, penulis aktif dalam beberapa kepanitiaan di antaranya adalah kepanitiaan dalam kegiatan Matematika Ria pada tahun 2006 dan 2007, masing-masing sebagai seksi konsumsi dan seksi Pubdekdok (Publikasi, dekorasi dan dokumentasi). Ramah Tamah Civitas Matematika pada tahun 2007 sebagai seksi dekorasi dan dokumentasi serta kepanitian dalam kegiatan Masa Perkenalan Departemen Matematika pada tahun 2006.
Halaman
DAFTAR TABEL ... vii
DAFTAR GAMBAR ... vii
DAFTAR LAMPIRAN ... vii
I PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Tujuan ... 1
II LANDASAN TEORI 2.1 Teorema Dasar Kalkulus I ... 1
2.2 Aturan Rantai ... 1
2.3 Deret dan Deret Geometri ... 3
2.4 Persamaan Diferensial Biasa ... 2
2.5 Teori Arus Lalu-lintas ... 2
2.5.1 Cara Pengukuran ... 3
2.5.2 Parameter Arus Lalu-lintas ... 3
III MODEL ARUS LALU-LINTAS PADA JALAN SATU ARAH 3.1 Model Makroskopik ... 5
3.1.1 Konservasi Kendaraan ... 5
3.1.2 Hubungan Kecepatan dan Kepadatan ... 6
3.1.3 Hubungan Arus dan Kepadatan ... 6
3.2 Model Mikroskopik ... 7
3.2.1 Model Mobil Pengikut ... 7
IV TIGA MODEL ARUS LALU-LINTAS 4.1 Model 1 ... 8 4.2 Model 2 ... 8 4.3 Model 3 ... 11 Simulasi Model 3 ... 11 4.4 Interpretasi Model... 18 V KONVERSI MODEL ... 19
VI SIMPULAN DAN SARAN ... 20
1 Nilai-nilai waktu, arus keluar, waktu tempuh, dan laju waktu tempuh berdasarkan solusi
analitik ...11
DAFTAR GAMBAR Halaman 1 Konservasi kendaraan ...4
2 Kurva hubungan kecepatan dan kepadatan lalu-lintas ...4
3 Diagram arus lalu-lintas ...5
4 Ilustrasi model mobil pengikut ...5
5 Grafik arus masuk dan arus keluar pada waktu ...10
6 Grafik waktu tempuh pada waktu ...10
7 Grafik laju perubahan waktu tempuh pada waktu ...10
8 Kecepatan dan posisi mobil-mobil model car-following pada contoh 1 (kasus 1) ...12
9 Kecepatan dan posisi mobil-mobil model car-following pada contoh 1 (kasus 2) ...13
10 Kecepatan dan posisi mobil-mobil model car-following pada contoh 1 (kasus 3) ...13
11 Kecepatan dan posisi mobil-mobil model car-following pada contoh 2 (kasus 1) ...14
12 Kecepatan dan posisi mobil-mobil model car-following pada contoh 2 (kasus 2) ...15
13 Kecepatan dan posisi mobil-mobil model car-following pada contoh 2 (kasus 3) ...15
14 Kecepatan dan posisi mobil-mobil model car-following pada contoh 3 (kasus 1) ...16
15 Kecepatan dan posisi mobil-mobil model car-following pada contoh 3 (kasus 2) ...17
16 Kecepatan dan posisi mobil-mobil model car-following pada contoh 3 (kasus 3) ...17
DAFTAR LAMPIRAN Halaman 1 Uraian Teorema 1 (Solusi Analitik Arus Keluar) ...22
2 Program Mathematica 6.0 untuk perilaku dua solusi analitik pada model 2 (model waktu tempuh linear) ...24
3 Program Mathematica 6.0 untuk simulasi model 3 ...26
I PENDAHULUAN
1.1 Latar Belakang
Dewasa ini pemodelan matematika telah berkembang seiring perkembangan matematika sebagai alat analisis berbagai masalah nyata. Dalam pengajaran mata kuliah pemodelan matematika, salah satu hal yang ditekankan adalah bagaimana memformulasikan suatu masalah nyata (fenomena fisik) dalam formula matematika. Pemodelan biasanya direpresentasikan dalam sebuah persamaan diferensial. Kebanyakan mahasiswa jarang terdorong untuk menanggapi dengan kritis akan model matematika yang dibahas. Ada dua alasan penyebab hal ini, yakni:
1. Model telah memberikan representasi yang sangat baik dan telah sesuai dengan proses fisika.
2. Proses fisika yang dimodelkan cenderung tidak lepas dari pengalaman sehari-hari. Pada karya tulis ini akan dibahas satu topik masalah nyata yang bersifat kompleks, yakni fenomena arus lintas. Arus lalu-lintas merupakan salah satu fenomena yang dapat dideskripsikan melalui pemodelan matematika dalam model dinamik kontinu sehingga model matematika yang dipelajari akan direpresentasikan dalam sebuah persamaan diferensial biasa yang dapat diselesaikan dengan faktor pengintegralan.
Pada tulisan ini akan diberikan tiga model sederhana untuk arus lalu-lintas untuk menunjukkan bahwa sebuah persamaan diferensial biasa terdapat pada pemodelan arus
lalu-lintas serta menunjukkan adanya representasi yang berbeda pada konteks pemodelan yang sama.
Dalam hal ini, ada dua kategori model arus lalu-lintas untuk mendeskripsikan model arus lalu-lintas, yakni:
1. Model makroskopik, yaitu memodelkan arus lalu-lintas yang terjadi pada sejumlah besar kendaraan pada suatu ruas jalan, di mana pada model ini dapat dilihat parameter seperti kepadatan, kecepatan dan arus lalu-lintas.
2. Model mikroskopik, yaitu memodelkan perilaku pengemudi dalam berinteraksi dengan kendaraan lain di depannya pada suatu jalan lalu-lintas seperti model mobil pengikut (car-following). Pada model ini dapat dilihat parameter seperti posisi dan kecepatan.
Secara ideal, model makroskopik adalah kumpulan dari perilaku yang terlihat pada model mikroskopik.
1.2 Tujuan
Adapun tujuan karya tulis ini adalah 1. Mempelajari karakteristik arus lalu-lintas. 2. Menunjukkan bahwa sebuah persamaan
diferensial biasa dapat digunakan pada model makroskopik dan model mikroskopik arus lalu-lintas.
3. Membandingkan beberapa karakteristik arus lalu-lintas pada model makroskopik dan mikroskopik arus lalu-lintas.
II LANDASAN TEORI
Pada bagian ini akan diuraikan beberapa definisi dan beberapa aspek teori arus lalu-lintas sebagai penunjang dalam memahami pembahasan pada bagian selanjutnya.
2.1 Teorema Dasar Kalkulus I
1. Jika , maka
2. Jika , maka
′ ′ ,
dengan adalah sebuah konstanta dan adalah suatu variabel.
[ Stewart, 2001]
2.2Aturan Rantai
Jika dan keduanya dapat
didiferensialkan, dan adalah
fungsi komposisi yang didefinisikan oleh
, maka dapat
didiferensialkan menjadi ′ yang diberikan oleh hasil kali
′ ′ ′ .
Dalam notasi Leibniz, jika dan
keduanya fungsi yang dapat didiferensialkan, maka
.
2.3 Deret dan Deret Geometri Definisi Jumlah Deret
Jumlah dari sebuah deret ∑ . diberikan oleh
, dengan adalah jumlah parsial ke- dari deret tersebut. Jika barisan konvergen
dan lim , dengan adalah suatu
bilangan real, maka deret ∑ dikatakan konvergen dan dituliskan
. atau
.
Bilangan disebut sebagai jumlah dari deret tersebut. Jika tidak, deret tersebut dikatakan divergen.
[Stewart, 2001] Deret Geometri
Sebuah deret geometri diberikan oleh ,
dikatakan konvergen jika | | 1 dan jumlahnya adalah
∑ , | | 1.
Jika | | 1, deret geometri ini divergen. [Stewart, 2001] 2.4 Persamaan Diferensial Biasa
Definisi Persamaan Diferensial Biasa
Sebuah persamaan yang melibatkan sebuah fungsi dan turunan-turunannya seperti , , , … …
disebut Persamaan Diferensial Biasa (PDB). Persamaan diferensial orde ke- adalah sebuah persamaan diferensial yang memiliki bentuk umum
, , ′, , … . . , 0,
di mana adalah sebuah fungsi dari ,
′ ⁄ adalah turunan pertama terhadap
, dan ⁄ adalah turunan ke-
terhadap .
[Farlow, 1994] Definisi Orde dan Derajat dari Persamaan Diferensial
Orde persamaan diferensial adalah turunan tertinggi yang terdapat pada persamaan. Sebagai contoh
3 2,
adalah persamaan diferensial orde pertama. Derajat dari persamaan diferensial adalah pangkat terbesar pada turunan tertinggi.
[Farlow, 1994] Definisi PDB Linear
Sebuah persamaan diferensial biasa orde ke- dikatakan linear jika dapat dituliskan ke dalam bentuk persamaan
,
0 .
Fungsi-fungsi , , … ,
disebut sebagai koefisien-koefisien dari persamaan diferensial. Jika adalah fungsi konstan untuk semua 0,1,2, … , , maka persamaan diferensial dikatakan memiliki koefisien konstan. Selalu diasumsikan bahwa fungsi kontinu dan
0 dengan interval tertentu pada persamaan yang didefinisikan. PDB linear dikatakan homogen jika 0 dan tak-
homogen jika 0.
Persamaan diferensial biasa yang tidak dapat ditulis seperti bentuk umum di atas disebut persamaan diferensial biasa taklinear.
[Farlow, 1994] Solusi PDB Linear Orde Pertama
Bentuk umum PDB linear orde pertama diberikan oleh:
′ ,
dengan , dan adalah sebarang
fungsi dalam .
Solusi PDB di atas diberikan oleh: 1
dengan disebut sebagai
faktor pengintegralan dan adalah konstanta pengintegralan.
[Farlow, 1994] 2.5 Teori Arus Lalu-Lintas.
Teori arus lalu-lintas merupakan alat yang membantu para peneliti di bidang transportasi untuk memahami dan menjelaskan sifat-sifat arus lalu-lintas. Sebagai wawasan tentang transportasi dan lalu-lintas, berikut ini diberikan beberapa aspek dari teori arus lalu-lintas.
2.5.1 Cara Pengukuran
Untuk membangun teori arus lalu-lintas perlu diketahui cara-cara pengukuran parameter-parameter penting arus lalu-lintas
yang bertujuan untuk memperoleh data lalu-lintas. Terdapat lima cara pengukuran, yaitu: a. Pengukuran pada Titik
Pengukuran pada titik dengan menggunakan sebuah alat yang dinamakan hand tallies adalah metode yang mula-mula digunakan dalam mengumpulkan data lalu-lintas. Metode ini mudah digunakan untuk menghitung banyaknya kendaraan yang lewat dan laju perubahannya. Dengan pengukuran yang teliti, metode ini dapat digunakan untuk menghitung waktu antarkendaraan (time headway). Dewasa ini pengukuran titik dilakukan dengan bantuan teknologi, seperti detektor titik, detektor gelombang mikro, radar dan kamera televisi.
Dalam pengukuran titik kepadatan lalu-lintas (density) tidak dapat diperoleh karena dalam hal ini tidak ada jarak yang terlihat.
b. Pengukuran pada Ruas Jalan
Yang dimaksud dengan ruas jalan di sini adalah bagian jalan yang panjangnya sekitar 10 meter. Pengukuran pada ruas jalan yang pendek dilakukan dengan menempatkan dua buah detektor titik di ujung-ujung ruas jalan. Hasil pengukuran yang diperoleh berupa banyaknya kendaraan, waktu antarkendaraan, dan kecepatan. Karena pendeknya jarak, pengukuran kepadatan lalu-lintas tidak disarankan.
c. Pengukuran di Sepanjang Jalan
Pengukuran jalan yang memiliki panjang setidaknya 0.5 km dilakukan dengan menggunakan foto udara atau beberapa yang diletakkan di tempat atau gedung yang tinggi. Selain banyak kendaraan dan kecepatan, data tentang kepadatan lalu-lintas dapat diperoleh dengan metode ini.
d. Pengukuran bergerak
Ada dua pendekatan dalam pengukuran bergerak, yaitu:
(1) Metode floating car.
Dengan metode ini, kecepatan dan waktu tempuh dinyatakan sebagai fungsi dari waktu dan posisi kendaraan di jalan. Data tentang kecepatan dan waktu tempuh dapat diperoleh dari pencatatan yang dilakukan oleh orang kedua yang ada di mobil. Selain itu, pengumpulan data dapat dilakukan dengan cara memodifikasi alat pencatatan kecepatan (speedometer). (2) Metode Simultan
Dengan metode ini, kecepatan dan volume kendaraan diukur secara simultan.
Metode ini dikembangkan oleh Wardrop dan Charlesworth (1954) dengan menggunakan mobil survey yang berjalan dua arah. Dengan metode ini diperoleh dua rumus: , dengan,
perkiraan arus pada jalan sesuai dengan dua arah yang diamati (kendaraan/menit).
banyaknya kendaraan yang melintas sesuai dengan arah yang diamati (sama dengan banyaknya kendaraaan yang ditemui mobil survei yang bergerak berlawanan arah).
banyaknya kendaraan yang mendahului mobil survei yang bergerak sesuai arah yang diamati.
: waktu tempuh mobil survei yang bergerak berlawanan arah.
: waktu tempuh mobil survei yang bergerak searah.
perkiraan waktu tempuh rata-rata kendaraan yang bergerak sesuai dengan arah yang diamati.
e. Pengukuran pada Wilayah Luas
Pengukuran ini dilakukan menggunakan Intelligent Transportation Systems (ITS) dengan melibatkan komunikasi antara mobil berperalatan khusus dengan sistem pusat. Umumnya data yang dicatat adalah kecepatan dan
waktu tempuh.
[Hall, 1975] 2.5.2 Parameter Arus Lalu-lintas
Arus lalu-lintas merupakan fenomena yang rumit untuk digambarkan tanpa memperkenalkan sejumlah istilah umum yang biasa digunakan dalam pembahasan model arus lalu-lintas. Beberapa istilah tersebut antara lain merupakan karakteristik arus lalu-lintas, yaitu:
a. Kecepatan
Kecepatan arus lalu-lintas didefinisikan sebagai kecepatan rata-rata dari semua kendaraan pada suatu aliran di jalan. Kecepatan didefinisikan sebagai perubahan posisi pada suatu waktu sehingga dinyatakan dalam jarak per satuan waktu, seperti
kilometer per jam (km/jam) atau meter per detik (m/detik). Pada umumnya kecepatan arus lalu-lintas yang diukur adalah kecepatan rata-rata selama menempuh jalan tertentu. Kecepatan rata-rata ini dihitung dengan membagi panjang suatu segmen atau ruas jalan dengan waktu tempuh rata-rata pada kendaraan-kendaraan yang melintasi segmen jalan tersebut. Karena itu, jika waktu-waktu tempuh adalah , , … . (jam) yang diukur untuk kendaraan yang melintasi suatu segmen jalan dengan panjang , maka kecepatan rata-rata dapat dihitung dengan:
∑ ,
dengan adalah kecepatan rata-rata (average travel speed) (km/jam), adalah panjang segmen jalan (km), adalah waktu tempuh kendaraan ke- (jam), adalah banyaknya waktu tempuh yang diamati, dan adalah waktu tempuh rata-rata (jam) yaitu
∑
.
Parameter kecepatan arus lalu-lintas dibedakan menjadi:
• Average running speed, didefinisikan sebagai panjang ruas jalan yang dilalui kendaraan dibagi dengan rata-rata waktu berjalan kendaraan untuk melintasi jalan, dengan waktu berjalan adalah hanya waktu saat kendaraan bergerak.
• Average travel speed, didefinisikan sebagai panjang ruas jalan yang dilalui kendaraan dibagi dengan rata-rata waktu tempuh kendaraan selama melintasi jalan, termasuk semua waktu saat kendaraan berhenti menunda perjalanan.
• Space mean speed, merupakan pengukuran kecepatan berdasarkan pada waktu rata-rata untuk melintasi jalan dengan jarak yang ditempuh, yaitu
1 ∑ ,
dengan ,
maka dipeoleh:
1
∑ 1 / .
dengan adalah kecepatan rata-rata
(km/jam) dan adalah kecepatan
kendaraan ke- (km/jam).
• Time mean speed adalah kecepatan rata-rata arus lalu-lintas yang diukur dari kecepatan semua kendaraan yang melintasi suatu titik pada jarak , sepanjang periode waktu tertentu misalkan . Maka diberikan
∑
,
dengan adalah total banyaknya kendaraan.
• Free-flow speed adalah kecepatan rata-rata kendaraan arus lalu-lintas yang diukur saat kondisi volume rendah sehingga pengemudi bebas mengemudi dengan kecepatan yang diinginkan tanpa dibatasi dengan adanya hambatan lalu-lintas di jalan.
b. Volume
Volume dan arus menyatakan banyaknya kendaraan yang melintasi satu titik atau bagian pada ruas jalan selama satu interval waktu yang diberikan yang dapat dinyatakan dalam periode tahunan, harian, jam, atau periode menit. Arus diperoleh dengan mengambil banyaknya kendaraan yang diamati dari periode bagian dari jam (misalkan menit) dan membaginya dengan waktu (dalam jam). Misalkan, volume 100 kendaraan yang diamati dalam periode 15 menit menyatakan arus sebesar 100 kendaraan/0,25 jam atau 400 kendaraan/jam.
c. Kepadatan
Kepadatan ditunjukkan sebagai banyaknya kendaraan yang ada di sepanjang ruas jalan tertentu. Jika jumlah kepadatan kendaraan tinggi menunjukkan bahwa setiap kendaraan terletak sangat berdekatan. Sebaliknya, jika jumlah kepadatan kendaraan rendah, berarti ada jarak antarkendaraan yang cukup besar. Umumnya, kepadatan dituliskan dalam satuan kendaraan per mil atau kendaraan per kilometer yang ditentukan dengan cara membagi total banyaknya kendaraan dengan panjang jalan. Kepadatan suatu jalan juga dapat dihitung dari kecepatan rata-rata dan arus, yaitu:
,
dengan, = arus (kendaraan/jam),
= kecepatan rata-rata (km/jam), = kepadatan (kendaraan/km). Misalkan pada suatu ruas jalan memiliki arus sebesar 1000 kendaraan/jam dan kecepatan rata-rata sebesar 50 km/jam maka kepadatan jalan tersebut adalah 20 kendaraan/km.
d. Spasi dan Time headway
Spasi didefinisikan sebagai jarak antarkendaraan pada arus lalu-lintas, diukur dalam satuan kaki atau meter. Sedangkan Time headway adalah waktu antarkendaraan
ketika melewati suatu titik pada ruas jalan.. Time headway dapat lebih mudah diukur dengan menggunakan stopwatch.
[Mathew, 2003]
III MODEL ARUS LALU-LINTAS
PADA JALAN SATU ARAH
Pembahasan mengenai model matematika arus lalu-lintas tidak akan lengkap tanpa mendiskusikan beberapa hal mengenai model arus lalu-lintas.
Ada dua hal yang harus diperhatikan dalam membangun model fenomena arus lalu-lintas, yaitu jalan dan kendaraan. Dalam hal ini jalan yang dilalui kendaraan dikatakan sebagai link (jalan lalu-lintas), yang dibedakan dalam dua kelompok yaitu:
a. Single Link ( jalan searah), yaitu sebuah bidang jalan di mana hanya memiliki satu arah jalur dengan sebuah pintu untuk kendaraan yang mengalir masuk dan sebuah pintu keluar untuk kendaraan yang mengalir keluar.
b. Double link (jalan dua arah), yaitu sebuah bidang jalan dengan dua arah jalur yang berlawanan, misalnya di antara titik A dan B, satu berasal dari A ke B dan satu sisi lain berasal dari B ke A.
Ada dua kelompok model yang menjelaskan arus lalu-lintas, yaitu model makroskopik dan model mikroskopik.
3.1 Model Makroskopik
Teori makroskopik lebih cenderung pada struktur model arus lalu-lintas yang mencakup pada sejumlah besar kendaraan. Pada Model ini dapat dilihat sifat-sifat seperti kepadatan lalu-lintas (kendaraan/satuan jarak), arus (kendaraan/satuan waktu), dan kecepatan (satuan jarak/satuan waktu) yang akan dijelaskan pada sub-bagian ini.
3.1.1 Konservasi Kendaraan
Prinsip ini digunakan untuk mengkuantifikasi perubahan banyaknya kendaraan pada suatu ruas jalan yang diukur dari hasil pengurangan arus kendaraan yang masuk terhadap arus kendaraan yang keluar pada interval jalan tertentu.
Misalkan perhatikan suatu bagian ruas jalan yang terletak di antara titik dan titik
∆ seperti yang ditunjukkan pada Gambar 1.
∆ Gambar 1. Konservasi kendaraan
Misalkan perubahan banyaknya kendaraan pada interval jalan tertentu dinotasikan dengan ∆ , , dengan sebagai titik koordinat (posisi) kendaraan pada suatu ruas jalan dan sebagai suatu peubah waktu. Perubahan banyaknya kendaraan
∆ , selama interval waktu ∆ sama
dengan arus yang mengalir sepanjang interval jalan tersebut:
, lim ∆ ∆ , , (3.1) dengan perubahan banyaknya kendaraan ∆ , adalah selisih antara banyaknya kendaraan yang masuk dan banyaknya kendaraan yang keluar. Misalkan, , adalah banyaknya kendaraan yang masuk ke titik pada waktu dan ∆ , adalah banyaknya kendaraan yang keluar dari titik
∆ pada waktu Maka banyaknya
kendaraan yang masih berjalan di antara dua titik koordinat pada jalan tersebut adalah
∆ , , ∆ , . (3.2)
Jika ∆ dinotasikan sebagai panjang
interval jalan yang dilalui oleh kendaraan-kendaraan selama waktu ∆ , konservasi kendaraan juga dapat dinyatakan oleh
, lim ∆ ∆ , ∆∆ , (3.3) dengan kecepatan adalah
, ∆∆ . (3.4) Dengan mensubstitusikan persamaan (3.2) dan (3.4) ke persamaan (3.3) maka diperoleh
Didefinisikan perubahan banyaknya kendaraan per satuan panjang jalan adalah kepadatan arus lalu-lintas.
, lim∆ , ∆ ∆ , . (3.6)
Dengan demikian
, , , . (3.7) Persamaan di atas memberikan argumen yang cukup sederhana yang diperoleh dengan dua cara dalam mengkuantifikasi banyaknya kendaraan sepanjang jarak jalan tertentu selama interval waktu yang sangat kecil. Yang pertama, banyaknya kendaraan ∆ selama interval waktu ∆ adalah perkalian arus dan interval waktu ∆ , yaitu ∆ ∆ . Yang kedua, dengan menggunakan asumsi bahwa selama interval waktu yang sama kecilnya, kendaraan bergerak dengan kecepatan , akan
menempuh jarak ∆ , sehingga ∆ ∆ .
Banyaknya kendaraan yang berjalan sepanjang interval jarak itu diperoleh dari hasil perkalian kepadatan dan jarak tempuh,
yaitu ∆ ∆ . Dengan demikian dua
interpretasi di atas memberikan
∆ ∆ . (3.8) Jika kecepatan dapat dihubungkan secara langsung pada kepadatan yaitu | , maka diperoleh hubungan langsung antara arus dan kepadatan, yaitu
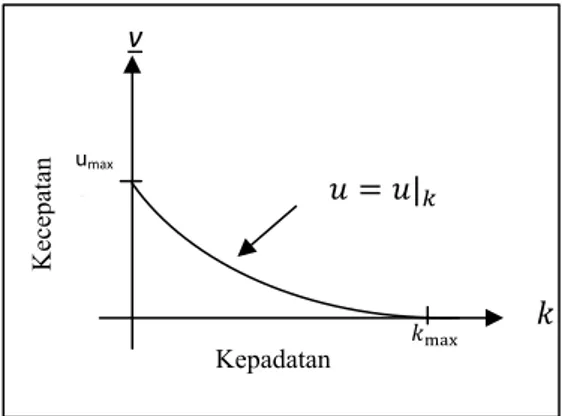
| | . (3.9) Hubungan ini akan dibahas pada bagian 3.1.3 3.1.2 Hubungan Kecepatan dan Kepadatan Kecepatan dan kepadatan lalu-lintas bertalian satu sama lain. Pengemudi akan menaikan kecepatan saat kepadatan lalu-lintas agak menurun dan sebaliknya mengurangi kecepatan saat kepadatan mulai meningkat. Kecepatan dan kepadatan dapat dihubungkan dengan persamaan | yang menyatakan bahwa kecepatan adalah fungsi dari kepadatan. Adapun persyaratan matematika untuk fungsi | adalah
| ,
0,
| 0.
Pengemudi akan mengendarai dengan kecepatan maksimum, ketika kepadatan hampir mendekati nilai terkecil, 0. Pengemudi akan menurunkan kecepatan ketika kepadatan meningkat. Jika 0, hal ini menyatakan kepadatan mencapai nilai maksimum atau dikatakan kepadatan yang
menyebabkan kemacetan yaitu .
Hubungan ini digambarkan oleh sebuah kurva pada Gambar 2.
Gambar 2. Kurva hubungan kecepatan dan kepadatan lalu-lintas.
3.1.3 Hubungan Arus dan Kepadatan
Hubungan arus dan kepadatan merupakan bentuk perluasan dari hubungan kecepatan dan kepadatan. Perhatikan kembali persamaan (3.9) pada bagian 3.1.1. Persamaan ini menyatakan bahwa arus hanya bergantung pada kepadatan. Pada kondisi arus normal, kendaraan bergerak dengan kecepatan tertinggi , ketika kepadatan bernilai sangat kecil ( 0 . Hal ini berarti arus bernilai nol yaitu | 0. Sedangkan kecepatan kendaraan pada lalu-lintas menurun saat kepadatan lalu-lintas maksimum,
| 0. Sehingga arus lalu-lintas yang mengalir adalah nol.
| | 0,
dengan 0 .
Hubungan ini membentuk sebuah kurva parabola seperti pada Gambar 3 yang disebut sebagai “diagram arus lalu-lintas”.
Gambar 3. Diagram arus lalu-lintas. Dari diagram di atas dapat dilihat bahwa kurva berslope positif sampai arus maksimum atau kapasitasnya, dicapai. Selanjutnya
q Ar us Kepadatan Kepadatan | umax xx v Kece pat an
slope adalah negatif ketika peningkatan yang terus-menerus pada kepadatan sehingga menyebabkan arus bernilai nol, dengan kata lain terjadi kemacetan lalu-lintas.
3.2 Model Mikroskopik
Model mikroskopik menggambarkan interaksi kendaraan pada suatu jalan lalu-lintas, yang menjelaskan perilaku pengemudi kendaraan dalam menanggapi berbagai rangsangan (stimuli) dari perilaku pengemudi kendaraan lain yang tepat ada di depannya. Dengan memodelkan percepatan kendaraan pengikut sebagai fungsi dari berbagai stimuli
yang diterimanya, seperti jarak
antarkendaraan, kecepatan relatif kedua kendaraan maupun waktu reaksi pengemudi kendaraan pengikut. Model mikroskopik digambarkan oleh sebuah model yang disebut sebagai model mobil pengikut (car-following model).
3.2.1 Model Mobil Pengikut
Perhatikan Gambar 4. Misalkan pada suatu ruas jalan lalu-lintas terdapat sejumlah kendaraan, setiap kendaraan diidentifikasi dengan posisi pada suatu peubah waktu , sehingga posisi kendaraan ke- pada waktu diberikan oleh . Bemper belakang Bemper depan t)
Gambar 4. Ilustrasi model mobil pengikut Dengan,
total panjang jalan.
panjang kendaraan ke- 1 . panjang kendaraan ke- .
jarak antara bemper depan kendaraan ke- dan bemper
belakang kendaraan ke- 1
pada waktu .
kecepatan kendaraan ke- 1 pada waktu .
percepatan kendaraan ke- pada waktu .
Teori mobil pengikut mengasumsikan bahwa setiap kendaraan yang bergerak mengikuti kendaraan di depannya adalah berdasarkan pada hubungan “rangsangan-tanggapan”, yaitu tanggapan pengemudi
kendaraan ke pada waktu sama
dengan koefisien sensitifitas dikalikan dengan rangsangan (stimuli) dari kendaraan
ke- 1 pada waktu . Tanggapan ini
dimodelkan dengan percepatan kendaraan (kendaraan pengikut) , yang bergerak di belakang kendaraan ke- 1 (kendaraan pemimpin). Sedangkan stimuli dimodelkan sebagai posisi kendaraan pengikut yang bergantung pada posisi kendaraan di
depannya, (kendaraan pemimpin).
Formula matematika model ini diberikan oleh
,
dengan adalah parameter sensitif yang memiliki dimensi per satuan waktu.Pengemudi kendaraan pengikut memerlukan waktu reaksi dalam memberikan tanggapan tehadap berbagai stimuli sehingga
.
Dengan menggunakan asumsi bahwa adalah konstan, maka persamaan di atas adalah sebuah persamaan diferensial biasa linear dengan koefisien konstan yang dapat diintegralkan sekali sehingga diperoleh
, dengan adalah konstanta.
Amati kembali Gambar 4. Misalkan semua kendaraan memiliki panjang yang sama yaitu
sehingga
, maka banyaknya kendaraan yang dapat memenuhi sepanjang jalan dapat diperoleh dengan
.
Dengan demikian kepadatan kendaraan di sepanjang jalan juga dapat diketahui, yaitu
IV TIGA MODEL ARUS LALU-LINTAS
Masih berkaitan dengan bab sebelumnya, pada bagian ini akan dibahas tiga model untuk suatu arus lalu-lintas yang mengalir pada suatu single link. Model-model tersebut terdiri atas dua model makroskopik dan satu model mikroskopik, yaitu:
1. Model makroskopik yang menghubungkan arus keluar dan volume.
2. Model makroskopik yang menghubungkan waktu tempuh dan volume.
3. Model mikroskopik mobil pengikut. Model 1 dan model 2 digunakan untuk memperhatikan bagaimana model berperilaku pada saat kondisi lalu-lintas normal atau stabil. Dimana kondisi stabil adalah kondisi ketika arus masuk dan waktu tempuh tetap.
Pada bagian ini juga akan ditunjukkan bahwa terdapat sejumlah pemodelan matematika untuk arus lalu-lintas dengan setiap konteks memberikan interpretasi fisik yang berbeda terhadap parameter dan variabel. Akan ditunjukkan pula bahwa sebuah persamaan diferensial biasa dapat memiliki dua interpretasi yang berbeda pada konteks pemodelan yang sama.
4.1Model 1
Model ini menghubungkan antara arus yang mengalir keluar , dari suatu ruas jalan pada waktu , dan volume kendaraan
, pada suatu ruas jalan pada waktu . Misalkan,
: arus yang mengalir masuk ke link (inflow) pada waktu t (kendaraan per satuan waktu).
: arus yang mengalir keluar dari link (outflow) pada waktu t (kendaraan per satuan waktu).
: volume kendaraan yang ada pada suatu ruas jalan pada waktu t (kendaraan).
Dengan didefinisikan ,
yaitu arus lalu-lintas yang mengalir keluar pada waktu t adalah fungsi dari volume pada waktu t. Dengan prinsip konservasi kendaraan, perubahan volume kendaraan pada link adalah arus yang masuk dikurangi dengan arus yang keluar, yaitu:
. (4.1) Tinjau suatu ruas jalan (link) bervolume yang tersebar merata. Jika lalu-lintas bergerak tanpa hambatan dan kendaraan terakhir
meninggalkan ruas jalan tersebut setelah waktu maka rata-rata arus keluar dari ruas jalan tersebut adalah , sehingga
. (4.2) berdasarkan aturan rantai, maka
. (4.3)
Substitusikan persamaan (4.3) ke persamaan (4.1) maka diperoleh
. (4.4) Persamaan (4.2) dan (4.4) disebut sebagai model lalu-lintas taksesak (uncongested). 4.2 Model 2
Model ini menghubungkan antara waktu tempuh kendaraan , untuk melintasi suatu panjang jalan pada waktu , dan volume kendaraan , pada suatu ruas jalan lalu-lintaspada waktu .
Misalkan adalah waktu tempuh pada saat , yaitu waktu yang dibutuhkan kendaraan untuk melintasi ruas jalan dari pintu masuk sampai dengan pintu keluar pada saat . Jika banyaknya kendaraan pada ruas
jalan meningkat maka waktu tempuh
kendaraan juga meningkat. Jika waktu tempuh kendaraan pada waktu bergantung linear pada banyaknya kendaraan pada waktu maka diberikan
, (4.5) dengan adalah waktu tempuh kendaraan untuk melintasi ruas jalan ketika tidak ada kendaraan lain yang mengalir pada link tersebut dalam satuan waktu dan adalah suatu konstanta dalam satuan kendaraan per satuan waktu.
Didefinisikan volume kendaraan pada link pada waktu adalah
v . (4.6) Dengan prinsip konservasi lalu-lintas, banyaknya kendaraan yang mengalir masuk pada waktu adalah sama dengan banyaknya
kendaraan yang keluar pada waktu yaitu,
(4.7)
Dengan menurunkan persamaan (4.7) terhadap waktu maka diperoleh arus keluar
pada waktu yaitu
1
. (4.8) Jika persamaan (4.6) disubstitusikan ke
persamaan (4.5), kemudian kedua ruas
diturunkan terhadap maka diperoleh laju perubahan waktu tempuh pada waktu , yaitu
. (4.9) Dengan demikian, arus keluar link pada
waktu menjadi
. (4.10)
Persamaan (4.10) dikatakan sebagai model waktu tempuh linear.
Terdapat dua solusi analitik untuk model waktu tempuh linear antara lain:
a. Solusi arus keluar
Teorema 1: Misalkan didefinisikan fungsi arus masuk pada waktu dengan
0 , , 00, (4.11)
maka solusi analitik arus keluar ke- 1,2,3, … . untuk 0 adalah
∑
∑ . (4.12)
Dengan menggunakan induksi matematika dari persamaan di atas, maka diperoleh
. (4.13)
Berdasarkan persamaan (4.11)
lim ,
, (4.14)
dengan menunjukkan maksimum arus
keluar stabil dari link yang diperbolehkan. Bukti: Lihat di Lampiran 1.
b. Solusi waktu tempuh
Pada bagian ini akan diuraikan perubahan waktu tempuh setiap saat. Dari persamaan (4.11) dan (4.8) dapat dilihat bahwa laju perubahan waktu tempuh merupakan fungsi linear bagian demi bagian dengan kemiringan setiap bagian diberikan oleh
, 0,1,2, .. (4.15) dengan diskontinuitas terjadi pada saat arus keluar berubah. Misalkan nilai-nilai waktu tempuh yang terjadi pada titik diskontinu tersebut dinotasikan dengan , , ,…. Nilai awal waktu tempuh adalah dan pada titik ini diskontinuitas pertama terjadi dengan arus keluar melompat dari 0 ke . Berdasarkan Teorema 1, diskontinuitas berikutnya terjadi pada waktu dengan waktu tempuh
(4.16) Diskontinuitas berikutnya terjadi pada waktu
, , dan
seterusnya, dengan waktu-waktu tempuh berturut-turut diberikan oleh:
1 ,
,
,
dan seterusnya (4.17)
Dengan demikian, pada waktu
∑ ,
waktu tempuh diberikan oleh 1
1 (4.18) dengan,
dan
∑ .
Dengan menggunakan persamaan (4.13) dan (4.18) diperoleh bentuk sederhana
, yaitu
Bentuk rekursif persamaan (4.19) dapat ditulis menjadi
1 1 1
… .1 ∏ . (4.20) Selanjutnya, dengan mensubstitusikan persamaan (4.12) ke persamaan (4.20) , maka diperoleh
∑ , (4.21) dengan adalah waktu tempuh pada waktu
. Dengan menjumlahkan deret pada persamaan (4.21) makadiperoleh
lim , (4.22) asalkan 1. (4.23) Persamaan di atas menunjukkan bahwa pada akhirnya waktu tempuh akan konvergen ke nilai yang diberikan pada persamaan (4.22). Dengan menggunakan software Mathematica 6.0, didapatkan tiga grafik dari model waktu tempuh linear sebagai ilustrasi keseluruhan perilaku solusi analitik yang telah dijelaskan. Dengan arus keluar (outflow) , waktu tempuh , dan perubahan waktu tempuh berubah terhadap waktu. Dengan arus masuk yang konstan, 10 kendaraan/ menit, 10 menit dan 20 kendaraan/menit.
Keterangan: = Arus keluar (outflow), = Arus masuk (inflow), Gambar 5 Grafik arus masuk dan arus keluar
pada waktu .
Dari Gambar 5 di atas dapat dilihat bahwa garis horizontal adalah arus masuk konstan
dan garis putus-putus adalah arus keluar dengan diskontinuitas terjadi pada saat arus keluar berubah. Secara asimtot outflow mendekati inflow yang konstan.
Keterangan: = Waktu tempuh ke = Waktu tempuh konstan Gambar 6 Grafik waktu tempuh pada waktu .
Grafik di atas menunjukkan perilaku kendaraan dengan waktu tempuh ke- yang secara asimtot mendekati waktu tempuh yang konstan.
Gambar 7 Grafik laju perubahan waktu tempuh pada waktu .
Grafik di atas menunjukkan laju perubahan waktu tempuh setiap saat dengan kemiringan bagian demi bagian diberikan oleh persamaan (4.15). Seiring bertambahnya waktu, laju perubahan waktu tempuh semakin mengecil.
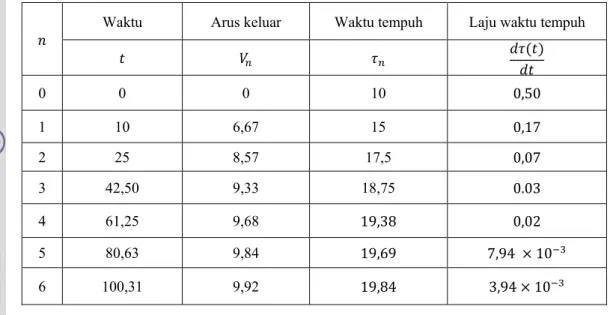
Untuk lebih jelas, koordinat setiap titik pada ketiga grafik di atas dapat di lihat pada Tabel 1. 0 20 40 60 80 100 t 0 2 4 6 8 10 12 p.v 0 20 40 60 80 100 t 10 12 14 16 18 20 t 0 20 40 60 80 100 t 0.0 0.1 0.2 0.3 0.4 0.5 0.6 dt dt
Tabel 1 Nilai-nilai waktu, arus keluar, waktu tempuh, dan laju waktu tempuh berdasarkan pada dua solusi analitik.
Waktu Arus keluar Waktu tempuh Laju waktu tempuh
0 0 0 10 0,50 1 10 6,67 15 0,17 2 25 8,57 17,5 0,07 3 42,50 9,33 18,75 0.03 4 61,25 9,68 19,38 0,02 5 80,63 9,84 19,69 7,94 10 6 100,31 9,92 19,84 3,94 10 4.3 Model 3
Seperti yang telah dijelaskan pada bab sebelumnya (model mikroskopik), formulasi model ini mengasumsikan bahwa pengemudi mobil pengikut menyesuaikan kecepatan menurut kecepatan relatif antara mobilnya dan mobil yang ada di depannya. Hal ini dideskripsikan oleh
, 4.24
dengan adalah posisi mobil pemimpin
pada waktu , adalah posisi mobil
pengikut pada waktu , dan adalah waktu reaksi atau waktu berfikir pengemudi mobil pengikut. Waktu reaksi adalah waktu yang dibutuhkan pengemudi mobil pengikut untuk bereaksi terhadap suatu perubahan pada perilaku pengemudi mobil pemimpin.
Konstanta adalah koefisien sensitivitas yang sangat berpengaruh terhadap besar kecilnya reaksi pengemudi mobil pengikut terhadap kecepatan relatif antarkendaraan. Semakin besar nilai maka semakin besar reaksi pengemudi mobil pengikut terhadap kecepatan relatif antarkendaraan.
Persamaan (4.24) dapat disederhanakan dengan menggunakan asumsi bahwa pengemudi mobil pengikut bereaksi dengan cepat, yaitu 0, sehingga diperoleh
. (4.25)
Dengan mendefinisikan dan
. Persamaan (4.25) dapat ditulis dalam bentuk kecepatan kendaraan yaitu
. (4.26) Jika kecepatan mobil pemimpin pada saat diberikan maka persamaan diferensial (4.26) dapat diselesaikan untuk mendapatkan fungsi kecepatan mobil pengikut. Persamaan (4.26) dapat diperumumkan pula untuk kasus sejumlah barisan mobil, yang masing-masing mengikuti mobil di depannya secara langsung. Dengan menggunakan asumsi bahwa pengemudi ke- memiliki koefisien sensitifitas dan kecepatan mobil ke- yang dinotasikan dengan . Secara umum dapat dituliskan
. (4.27) Dengan menggunakan (4.27), jika diberikan maka kecepatan-kecepatan semua mobil dapat dievaluasi.
Simulasi Model 3
Pada bagian ini sebuah bentuk PDB orde 1 pada persamaan 4.27 akan disimulasikan dengan menggunakan program Mathematica 6.0. Dengan sebuah fungsi kecepatan kendaraan (mobil) pertama diberikan sehingga kecepatan-kecepatan semua mobil di belakangnya dapat dievaluasi dan sebuah fungsi posisi hasil pengintegralan kecepatan mobil pertama untuk mengevaluasi posisi mobil-mobil di belakangnya. Adapun tujuan dari simulasi ini adalah untuk mengetahui reaksi pengemudi mobil pengikut terhadap pengaruh koefisien sensitifitas .
Simulasi terdiri atas tiga contoh dengan masing-masing terdiri atas tiga kasus. Pada kasus pertama, akan ditunjukkan hasil
simulasi jika menggunakan nilai yang sama, pada kasus kedua, akan ditunjukkan hasil simulasi jika menggunakan nilai yang semakin membesar, dan pada kasus ketiga, akan ditunjukkan hasil simulasi jika menggunakan nilai semakin mengecil.
¾ Contoh 1
Misalkan sebuah kendaraan (mobil) pertama (terdepan) bergerak dengan fungsi kecepatan:
2 40,
jika diintegralkan sekali maka diperoleh fungsi posisi mobil pertama, yaitu:
40 .
Jika 0 100, maka 100, sehingga
40 +100,
dengan satuan km/jam untuk kecepatan dan km untuk posisi. Berdasarkan pernyataan pada model 3 (persamaan 4.27), maka hasil evaluasi dengan komputer dalam program Mathematica 6.0 dengan 0 80 dan s 0 50 berturut-turut sebagai posisi mobil kedua (mobil pengikut pertama) dan posisi mobil ketiga (mobil pengikut kedua) pada saat 0 serta kecepatan semua kendaraan adalah 40 m/jam pada 0. Telah diperoleh hasil simulasi dalam grafik di bawah ini. (Fungsi posisi dan kecepatan mobil-mobil model car-following lihat di Lampiran 3).
# Kasus I : konstan
Pada kasus ini misalkan digunakan nilai 1 1,2,3 .
(a). (b). Ket: : perilaku mobil pertama.
: perilaku mobil kedua. : perilaku mobil ketiga.
Gambar 8 Kecepatan dan posisi mobil-mobil model car-following pada contoh 1 (kasus I). Gambar 8 adalah hasil simulasi untuk
konstan yang menunjukkan bahwa semua pengemudi mobil bereaksi sama terhadap mobil di depannya. Semua mobil bergerak beriringan mengikuti mobil di depannya
dengan jarak antarmobil dan peningkatan kecepatan yang stabil seiring berjalannya waktu. Dapat dilihat pada Gambar 8a semua kendaraan memiliki kecepatan yang sama
pada 0. 2 4 6 8 10 t 100 200 300 400 500 s 2 4 6 8 10 t 10 20 30 40 50 60 70 u
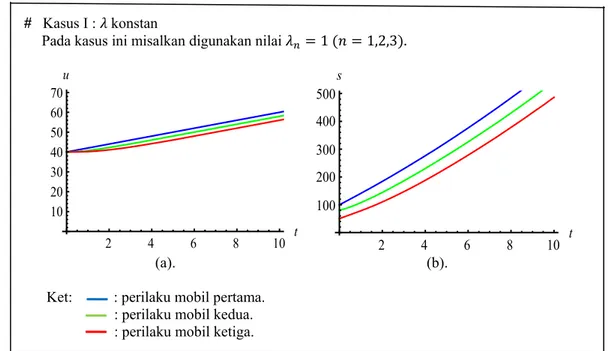
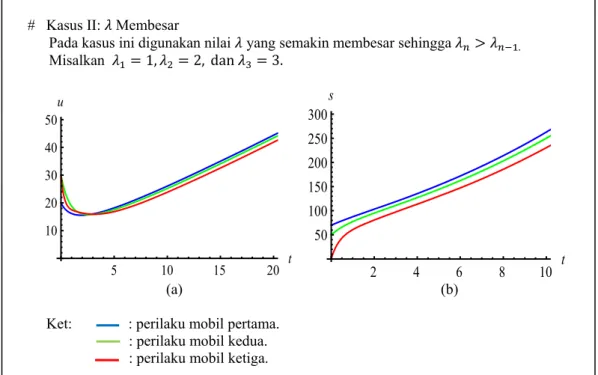
2 4 6 8 10 t 10 20 30 40 50 60 70 u 2 4 6 8 10 t 10 20 30 40 50 60 70 u # Kasus II : Membesar
Pada kasus ini digunakan nilai yang semakin membesar sehingga .
Misalkan 1, 2, dan 5.
(a) (b) Ket: : perilaku mobil pertama.
: perilaku mobil kedua. : perilaku mobil ketiga.
Gambar 9 Kecepatan dan posisi mobil-mobil model car-following pada contoh 1 (kasus II). Dapat dilihat pada Gambar 9 di atas,
peningkatan besarnya koefisien sensitifitas untuk mobil ke- menyebabkan pengemudi mobil tersebut bereaksi lebih cepat untuk menaikkan kecepatan (perubahan posisi) dan percepatan (perubahan kecepatan) dengan bergerak mendekati mobil di depannya, yang berarti jarak antarmobil ke dan ke- 1 lebih dekat dibandingkan dengan kasus 1.
Gambar 9b menjelaskan mobil kedua bereaksi lebih cepat terhadap reaksi mobil pertama yang bergerak konstan (tidak ada perubahan reaksi), sehingga jarak semakin dekat. Dan mobil ketiga bereaksi lebih cepat terhadap mobil kedua dengan mendekati mobil kedua yang bereaksi dipercepat.
# Kasus III: Mengecil
Pada kasus ini digunakan nilai yang semakin mengecil sehingga . Misalkan 1 , 0.7 , dan 0.1.
(a) (b) Ket: : perilaku mobil pertama.
: perilaku mobil kedua. : perilaku mobil ketiga.
Gambar 10 Kecepatan dan posisi mobil-mobil model car-following pada contoh 1 (kasus III).
2 4 6 8 10 t 100 200 300 400 500 s 2 4 6 8 10 t 100 200 300 400 500 s
10 20 30 40 50 t 10 20 30 40 50 u
Gambar 10 adalah hasil simulasi jika
koefisien sensitifitas, mobil ke- diperkecil, khususnya untuk mobil-mobil pengikut. Dapat dilihat pada gambar, mobil kedua dan ketiga bereaksi lebih lambat untuk menaikkan kecepatan dan percepatannya. Hal ini dapat dilihat dari jarak antargrafik yang menunjukkan jarak antarmobil yang lebih besar dibandingkan saat konstan.
¾ Contoh 2
Misalkan sebuah mobil pertama (terdepan) bergerak dengan fungsi kecepatan:
40,
jika diintegralkan sekali maka diperoleh fungsi posisi mobil pertama, yaitu:
40 ,
Jika 0 60, maka 60, sehingga
40 +60,
dengan satuan km/jam untuk kecepatan dan km untuk posisi. Berdasarkan pernyataan pada model 3 (persamaan 4.27), maka hasil evaluasi dengan komputer dalam program Mathematica 6.0 dengan 0 30 dan s 0 5 berturut-turut sebagai posisi mobil kedua (mobil pengikut pertama) dan posisi mobil ketiga (mobil pengikut kedua) pada saat 0 serta kecepatan mobil kedua dan ketiga adalah nol pada
0 , 0 0 0 . Telah diperoleh
hasil simulasi dalam grafik berikut ini. (Fungsi posisi dan kecepatan mobil-mobil model car-following lihat di Lampiran 3).
# Kasus I: Konstan
Pada kasus ini misalkan digunakan nilai 1 1,2,3 .
(a) (b) Ket: : perilaku mobil pertama.
: perilaku mobil kedua : perilaku mobil ketiga.
Gambar 11 Kecepatan dan posisi mobil-mobil model car-following pada contoh 2 (kasus I). Untuk Gambar 11 di atas diasumsikan
mobil-mobil sedang bergerak di suatu ruas jalan yang sulit untuk mengendarai dengan kecepatan lebih tinggi sehingga kecepatan hanya berkisar antara 39-42 km/jam dengan menurunkan dan menaikkan kecepatan seiring berjalannya waktu untuk semua mobil.
Pada grafik posisi mobil-mobil, mobil kedua mengikuti mobil pertama dengan jarak antarmobil yang konstan sepanjang waktu yaitu 30 km. Dan mobil ketiga bergerak mengikuti mobil kedua dengan jarak antarmobil yang konstan sepanjang waktu yaitu 25 km. 2 4 6 8 10 t 100 200 300 400 500 s
10 20 30 40 50 t 10 20 30 40 50 u
# Kasus II: Membesar
Pada kasus ini digunakan nilai yang semakin membesar sehingga .
Misalkan 1, 5, dan 8.
(a) (b) Ket: : perilaku mobil pertama.
: perilaku mobil kedua. : perilaku mobil ketiga.
Gambar 12 Kecepatan dan posisi mobil-mobil model car-following pada contoh 2 (kasus II). Gambar 12 menjelaskan saat koefisien
sensitifitas diperbesar, maka reaksi pengemudi mobil-mobil tersebut adalah lebih cepat untuk menaikkan kecepatan dan percepatannya. Hal ini dapat dilihat dari reaksi mobil kedua 5 terhadap mobil pertama
1 yang lebih cepat (jarak lebih dekat) dibandingkan dengan mobil ketiga 8 terhadap mobil kedua 5 .
# Kasus III: Mengecil
Pada kasus ini digunakan nilai yang semakin mengecil sehingga . Misalkan 1 , 0.4 , dan 0.3.
(a) (b) Ket: : perilaku mobil pertama.
: perilaku mobil kedua. : perilaku mobil ketiga.
Gambar 13 Kecepatan dan posisi mobil-mobil model car-following pada contoh 2 (kasus III). Gambar 13 menjelaskan saat koefisien
sensitifitas diperkecil 1 , maka
pengemudi mobil-mobil tersebut bereaksi lebih lambat. Dapat dilihat dari jarak antargrafik yang menunjukkan jarak
antarmobil yang lebih jauh. Mobil kedua bereaksi jauh lebih lambat (jarak lebih jauh) terhadap mobil pertama dibandingkan dengan reaksi pengemudi mobil ketiga terhadap mobil kedua. 2 4 6 8 10 t 100 200 300 400 500 s 10 20 30 40 50 t 10 20 30 40 50 u 2 4 6 8 10 t 100 200 300 400 500 s
¾ Contoh 3
Misalkan sebuah mobil pertama (terdepan) bergerak dengan fungsi kecepatan:
2 √ ,
jika diintegralkan sekali maka diperoleh fungsi posisi mobil pertama, yaitu:
40√1 ,
Jika 0 70, maka 30 sehingga 40√1 30, dengan satuan km/jam untuk kecepatan dan km untuk posisi. Berdasarkan pernyataan pada
model 3 (persamaan 4.27), maka hasil evaluasi dengan komputer dalam program Mathematica 6.0 dengan 0 50 dan s 0 0 berturut-turut sebagai posisi mobil kedua (mobil pengikut pertama) dan posisi mobil ketiga (mobil pengikut kedua) pada saat 0. Kecepatan mobil-mobil pada 0 adalah 20 km/jam, 16 km/jam dan 20 km/jam. Telah diperoleh hasil simulasi dalam grafik berikut ini. (Fungsi posisi dan kecepatan mobil-mobil model car-following lihat di Lampiran 3).
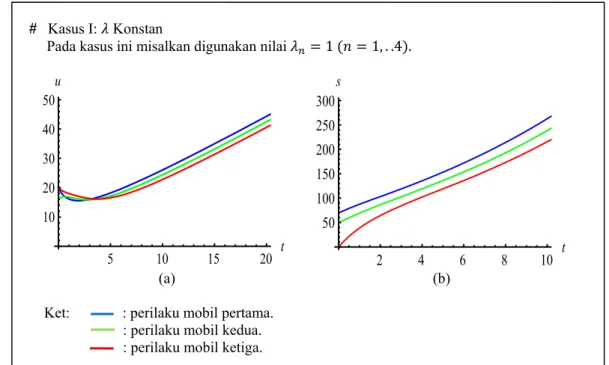
# Kasus I: Konstan
Pada kasus ini misalkan digunakan nilai 1 1, . .4 .
(a) (b) Ket: : perilaku mobil pertama.
: perilaku mobil kedua. : perilaku mobil ketiga.
Gambar 14 Kecepatan dan posisi mobil-mobil model car-following pada contoh 3 (kasus I). Gambar 14 menjelaskan mobil kedua
bergerak mengikuti mobil pertama pada jarak 20 meter sepanjang waktu dari mobil pertama. Dan mobil ketiga bergerak pada
jarak 50 meter dari mobil kedua pada 0 kemudian mendekati mobil kedua dan kemudian mejauh dari mobil di depannya. 5 10 15 20 t 10 20 30 40 50 u 2 4 6 8 10 t 50 100 150 200 250 300 s
5 10 15 20 t 10 20 30 40 50 u
# Kasus II: Membesar
Pada kasus ini digunakan nilai yang semakin membesar sehingga .
Misalkan 1, 2, dan 3.
(a) (b)
Ket: : perilaku mobil pertama. : perilaku mobil kedua. : perilaku mobil ketiga.
Gambar 15 Kecepatan dan posisi mobil-mobil model car-following pada contoh 3 (kasus II)
Gambar 15a menjelaskan kecepatan mobil-mobil model car-following menurun untuk beberapa, waktu kemudian meningkat. Oleh karena peningkatan besarnya koefisien sensitifitas , maka pengemudi mobil-mobil pengikut mempercepat reaksinya untuk meningkatkan kecepatan maupun percepatannya. Hal ini dapat dilihat dari
pergeseran garis berwarna hijau dan merah pada Gambar 15a dan 15b.
Gambar 15b menjelaskan mobil kedua dan ketiga mempercepat reaksinya dengan meningkatkan kecepatannya sehingga posisinya tampak dekat dengan mobil di depannya (mobil ke- 1 .
# Kasus III: Mengecil
Pada kasus ini digunakan nilai yang semakin mengecil sehingga .
Misalkan 1 , 0.6, dan 0.2.
(a) (b)
Ket: : perilaku mobil pertama. : perilaku mobil kedua. : perilaku mobil ketiga.
Gambar 16 Kecepatan dan posisi mobil-mobil model car-following pada contoh 3 (kasus III).
5 10 15 20 t 10 20 30 40 50 u 2 4 6 8 10 t 50 100 150 200 250 300 s 2 4 6 8 10 t 50 100 150 200 250 300 s
Gambar 16a menjelaskan kecepatan mobil-mobil model car-following menurun untuk beberapa waktu, kemudian meningkat. Oleh karena penurunan besarnya koefisien sensitifitas , maka pengemudi mobil-mobil pengikut memperlambat reaksinya untuk meningkatkan kecepatan maupun percepatannya. Hal ini tampak jelas terlihat dari pergeseran garis berwarna hijau dan merah pada Gambar 16a dan 16b.
Gambar 16b menjelaskan mobil kedua dan ketiga memperlambat reaksinya dengan menunjukkan jarak antarmobil yang lebih besar.
4.4 Interpretasi Model
Perhatikan kembali model makroskopik pada persamaaan (4.1). Jika dimisalkan bahwa arus keluar bergantung linear pada volume yaitu
, (4.28) berdasarkan aturan rantai, maka
, (4.29) Substitusikan persamaan (4.29) ke persamaan (4.1) maka diperoleh
, (4.30) dengan adalah waktu tempuh saat kondisi stabil di mana arus masuk dan arus keluar adalah konstan.
Persamaan (4.28) dan (4.30) disebut sebagai model arus taksesak (uncongested) karena model membiarkan arus keluar meningkat secara bebas dengan peningkatan volume. Dapat dilihat bahwa persamaan (4.30) dan (4.24) memiliki bentuk persamaan diferensial yang sama, yaitu,
. (4.31) Persamaan (4.31) adalah PDB linear orde-1 dengan penyelesaian
(4.32)
Ada dua interpretasi dari persamaan (4.31):
1. Jika didefinisikan sebagai arus lalu-lintas yang mengalir keluar meninggalkan link dalam satuan kendaraan/satuan waktu, sebagai arus lalu-lintas yang mengalir masuk link dalam satuan kendaraan/satuan waktu, dan sebagai kebalikan dari waktu tempuh stabil maka persamaan (4.31) merepresentasikan sebuah model makroskopik arus lalu-lintas.
2. Jika didefinisikan sebagai kecepatan kendaraan di belakang dalam satuan
meter/detik, sebagai kecepatan
kendaraan di depannya dalam meter/detik,
dan sebagai kepekaan kendaraan
pengikut terhadap perubahan gerak kendaraan di depannya maka persamaan (4.31) merepresentasikan sebuah model mikroskopik mobil pengikut.
Bentuk umum persamaan (4.32) adalah
, 1, … . , , (4.33)
Dengan penyelesaian
. (4.34)
Misalkan ruas jalan dibagi menjadi segmen berpanjang sama sehingga tiap segmen memiliki waktu tempuh . Karena
arus keluar dari segmen ke- 1
merupakan arus masuk segmen ke- maka diperoleh persamaan-persamaan diferensial
(4.35)
untuk 1, … . . , . Jika arus masuk
diberikan maka arus masuk ke setiap segmen, yaitu , ……, dapat dihitung. Pada akhirnya pun dapat diperoleh. hubungan antara (4.35) dan (4.33) menjadi jelas.
Dengan demikian persamaan (4.33) dapat diinterpolasikan sebagai model mikroskopik
mobil pengikut atau model makroskopik segmen.
V KONVERSI MODEL
Pada bagian ini akan dipelajari dua pengkonversian model makroskopik. Ada dua bagian konversi. Pada bagian pertama akan ditunjukkan hasil konversi model waktu tempuh yang bergantung volume ke model arus keluar yang bergantung volume dengan asumsi kondisi arus konstan seiring berjalan waktu dan pada bagian kedua akan ditunjukkan hasil konversi model sebaliknya. Berikut akan dibahas konversi model pada bagian yang pertama.
5.1 Konversi 1
Misalkan diasumsikan kondisi arus masuk adalah konstan (kendaraan per menit) saat memasuki link, kendaraan-kendaraan memiliki waktu tempuh stabil menit untuk melintasi link. Karena itu, pada saat volume kendaraan pada link adalah . Untuk
konversi model dimana dan
, dengan mengasumsikan solusi arus stabil, maka model waktu tempuh yang bergantung volume (dari persamaan 4.5) menjadi
(5.1)
Selanjutnya substitusikan ke
persamaan (5.1) maka diperoleh
(5.2) Persamaan (5.2) di atas menunjukkan formula hubungan antara arus masuk dan volume pada suatu ruas jalan. Dengan mengasumsikan hubungan eksak pada kondisi statik, model arus keluar yang bergantung volume adalah sebanding dengan model waktu tempuh bergantung volume (lihat persamaan 4.5) dengan variasi waktu berjalan seperti yang diberikan oleh persamaan (4.1). Maka
1 5.3 Dengan berlakunya persamaan (4.5), persaman (5.3) tidak membiarkan arus keluar untuk melebihi nilai dan jika ⁄ 1
maka persamaan (5.3) mendekati nilai ⁄ .
Persamaan (5.3) direpresentasikan sebagai model arus taksesak (uncongested), seperti persamaan (5.1).
Selanjutnya akan dibahas konversi model bagian kedua yaitu konversi model arus keluar yang bergantung volume ke model waktu tempuh yang bergantung volume pada konversi 2.
5.2 Konversi 2
Pada teknik konversi model ini akan lebih mudah dilakukan saat kondisi stabil untuk konversi dari model arus keluar bergantung volume ke model waktu tempuh bergantung volume. Sebagai contoh, model arus keluar yang bergantung pada volume, di mana arus keluar dari suatu ruas jalan bergantung pada kuadrat volume ruas jalan, yang didefinisikan oleh fungsi
,0
0 , selainnya (5.4) Dengan menyatakan waktu tempuh stabil. Dari model ini, peningkatan volume pada suatu ruas jalan dapat menyebabkan arus keluar terhalang, sehingga jika volume lalu-lintas pada ruas jalan mencapai tingkat kemacetan lalu-lintas , maka arus keluar lalu-lintas berhenti.
Perhatikan model ini, jika model berperilaku seperti model arus taksesak seperti pada persamaan (4.1) dan (5.1) dan hubungan antara persamaan (4.1) dan (5.4) membentuk model arus sesak. Dari hubungan persamaan (5.3) dan persamaan (5.4) maka diperoleh model waktu tempuh yang bergantung volume yaitu
(5.5)
Jika volume lalu-lintas pada ruas jalan mendekati kemacetan , maka waktu tempuh cenderung tak terbatas, hal ini menunjukkan awal dari kemacetan lalu-lintas.
VI SIMPULAN DAN SARAN
5.1 Simpulan
1. Model makroskopik dan mikroskopik arus lalu-lintas dapat dituliskan dalam sebuah persamaan diferensial biasa. 2. Dapat ditunjukkan bahwa pada konteks
pemodelan yang sama dapat memiliki dua representasi yang berbeda .
3. Semakin besar koefisien sensitifitas mobil ke- , maka reaksi pengemudi mobil ke- untuk melakukan perubahan posisi dan kecepatannya adalah cepat. 4. Semakin kecil koefisien sensitifitas
mobil ke- , maka reaksi pengemudi mobil ke- untuk melakukan perubahan posisi dan kecepatannya adalah lambat.
5.2 Saran
Pada karya tulis ini telah dibahas bahwa
sebuah persamaan diferensial biasa dapat digunakan pada model makroskopik dan model mikroskopik arus lalu-lintas dengan penyelesaian faktor integral. Karya tulis ini merupakan pelatihan bagi para mahasiswa untuk berlatih berfikir kristis terhadap suatu model yang diberikan. Akan lebih baik lagi jika ada yang ingin menindak lanjuti masalah ini dengan masalah yang lebih kompleks lagi yaitu seperti membahas model arus lalu-lintas lainnya dalam sistem persamaan diferensial parsial atau mengubah masalah model ini dari solusi persamaan diferensial biasa ke solusi persamaan diferensial parsial.DAFTAR PUSTAKA
Ardana, NKK. 2004. Panduan Penggunaaan Mathematica. Bogor: Departemen Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam.
Clive, LD. 2004. Principle of Mathematical modeling 2nd ed. California: Elsevier. Farlow, SJ. 1994. An Introduction to
Differential Equation and Their Application. New York: Mc Graw-Hill. Hall, FL. 1975. Traffic Stream Characteristic.
http://www.tfhrc.gov/its/tft/chap2.pdf [14 Agustus 2008]
Mathew, TV. 2003. Car Following Model. http://www.civil.iitb.ac.in.htm.
[14 Agustus 2008]
McCartney, M & M. Carey. 1999.
Modelling Traffic Flow: Solving and
Interpreting Differential Equations. Teaching Mathematical and its Appilications, 18:115-121.
McCartney, M & M. Carey. 2000.
Modelling Traffic Flow: Interpreting Roots and Applying Summations. Teaching Mathematics and its Applications, 19:21-29.
McCartney, M & M. Carey. 2000. Follow that Car! Investigating a Simple Class of Car Following Model. Teaching Mathematics and its Applications, 19:83-87.
McCartney, M & M. Carey. 2000.
Comparing Mathematical Models of Traffic Flow. Teaching Mathematics and its Applications, 19:183-187.
Stewart, J. 2001. Kalkulus Jilid I. Ed. Ke-4. Jakarta: Erlangga. (Terjemahan).
LAMPIRAN 1
Uraian Teorema 1 (Solusi Analitik Arus Keluar).
¾ Perhatikan kembali Teorema 1.
Misalkan arus masuk pada waktu diberikan oleh
0 , 0 , 0 Maka solusi analitik arus keluar ke- 1,2,3, … . untuk 0 adalah
∑
∑ .
Bukti:
Dari persamaan 4.10 pada model waktu tempuh linear.
Solusi analitik arus keluar (outflow),
1,2,3, … . adalah formula umum outflow pada waktu + sebagai fungsi dari outflow pada waktu , dengan 0.
Misalkan adalah arus yang mengalir masuk ke pada waktu dan adalah arus yang mengalir keluar dari pada
waktu , maka arus keluar
1,2,3 … yang akan terjadi adalah arus keluar pada waktu + , dengan adalah waktu tempuh arus untuk mencapai suatu titik pada ruas jalan, yaitu
(4.10.1) Misalkan arus lalu-lintas mulai berjalan memasuki link pada waktu 0. Karena
0 0 (tidak ada kendaraan yang
mengalir), maka arus menempuh perjalanannya selama waktu sebagai waktu tempuh awal kendaraan-kendaraan tersebut, karena 0 . Dengan laju waktu tempuh
sebesar , maka dengan
menggunakan persamaan (4.10.1) maka arus keluar saat ini ( 1, arus keluar pertama) adalah
0 1
0 1
1 1,
Karena kontinu, perjalanan akan dilanjutkan
pada , sehingga waktu tempuh
berikutnya adalah
1
Untuk 2, maka adalah arus keluar berikutnya yang dimulai pada , kontinu dari nilai konstan sehingga laju waktu
tempuh saat ini adalah ⁄ ,
dengan waktu tempuh sehingga
1
1
.
Selanjutnya 3, maka adalah arus yang dimulai pada , kontinu dari nilai konstan sehingga laju waktu tempuh saat
ini adalah ⁄ , dan memiliki
waktu tempuh sehingga
diperoleh
1 1
.
Demikian seterusnya hingga diperoleh solusi analitik arus keluar -n 1,2,3, … yaitu:
∑
∑ .
Jadi Teorema 1 terbukti.
Pembuktian Persamaan (4.13)
Akan dibuktikan persamaan (4.13) dengan menggunakan prinsip induksi matematika dari persamaan (4.10).
• Basis Induksi
Untuk 1, maka diperoleh
∑ ∑
.
Yang merupakan arus keluar pertama sebagai
fungsi waktu 0 dan 0 .
• Hipotesis Induksi Anggap benar untuk .
∑
∑
.
• Langkah Induksi
Akan dibuktikan benar untuk 1
∑ ∑ 1 1 . Pembuktian Persamaan (4.14)
Dengan menggunakan asumsi dari jumlah sebuah deret geometri yang konvergen yaitu
1
1 , 1
Dari persamaan (4.12)yaitu
∑ ∑ , maka ∑ ∑ . (4.12.1)
Jelas, jika ⁄ 1, maka lim
. Sebaliknya, jika ⁄ 1, dengan mengalikan pembagi dan penyebut pada
persamaan (A1) dengan ⁄ maka
diperoleh ∑ ∑ ∑ ∑ .
Dan jika / 1, maka lim .
Pembuktian (maksimum arus keluar
yang diperbolehkan)
Dari model waktu tempuh linear (persamaan 4.10)
Dari persamaan (4.10) diperoleh bahwa 1 . Dengan menggunakan asumsi bahwa
, maka
1 ,
dengan demikian
.
Jika arus keluar pada waktu lebih kecil dari maka arus keluar pada waktu juga akan lebih kecil dari . Jika beberapa saat pada waktu tidak ada arus yang keluar karena tidak ada kendaraan yang mengalir,
maka 0 .
Lampiran 2. Program Mathematica 6.0 untuk perilaku dua solusi analitik pada model 2 (model waktu tempuh linear).
(*Parameter yang digunakan dalam komputasi*) =10; =20;P0=10; [0]= ;
(*Fungsi arus keluar ke- *)
V n_ : P0∑ P0
β ∑ P0β
(* Fungsi waktu tempuh ke- *) [n_]:= [n-1] (1+1/β (P0-V[n-1])) (* Waktu yang digunakan *) sbX Table τ i , j, 0,10 //N
{0.,10.,25.,42.5,61.25,80.625,100.313,120.156,140.078,160.039,180.02} (*Nilai arus keluar*)
sbY Table V i , i, 0,10 //N
{0.,6.66667,8.57143,9.33333,9.67742,9.84127,9.92126,9.96078,9.98043,9.99022,9.99511} (* Nilai waktu tempuh*)
data Table τ i , i, 0,10 //N
{10.,15.,17.5,18.75,19.375,19.6875,19.8438,19.9219,19.9609,19.9805,19.9902} (*Program Mathematica 6.0 untuk mencari titik koordinat waktu dan arus keluar*) data1 Table τ i , V j , j, 0,6 //N
{{0.,0.},{10.,6.66667},{25.,8.57143},{42.5,9.33333},{61.25,9.67742},{80.625,9.84127},{100 .313,9.92126}}
(*Program Mathematica 6.0 untuk mencari titik koordinat waktu dan laju waktu tempuh*) data2 Table τ , 1/β P0 V j , j, 0,6 //N
{{0.,0.5},{10.,0.166667},{25.,0.0714286},{42.5,0.0333333},{61.25,0.016129},{80.625,0.007 93651},{100.313,0.00393701}}
(*Program Mathematica 6.0 untuk mencari titik koordinat waktu dan waktu tempuh*) data3 table τ i , τ j , j, 0,6 //N
{{0.,10.},{10.,15.},{25.,17.5},{42.5,18.75},{61.25,19.375},{80.625,19.6875},{100.313,19.84 38}}
(*Program Mathematica 6.0 untuk mencari gambar 5. Grafik arus , terhadap waktu ).
gbrA=Plot[P0,{x,0,105},PlotStyle {Thickness[0.007],Black}];
gbrB=ListPlot[data1,Joined True,InterpolationOrder 0,PlotStyle {Dashed, Thickness[0.007],Black}];
Show[gbrA,gbrB,PlotRange {{-10,110},{-1,12}},AxesOrigin {-10,-1},AxesLabel {t,p.v}]
(* Program Mathematica 6.0 untuk mencari gambar 6. Grafik waktu tempuh terhadap waktu t).
gbrC=Plot[ /(1-P0/ ),{x,0,105},PlotStyle {Thickness[0.007],Black}];
gbrD=ListPlot[data3,Joined True,InterpolationOrder 1,PlotStyle {Dashed,Thickness[0.007 ],Black}];
Show[gbrC,gbrD,PlotRange {{-10,110},{9,21}},AxesOrigin {-10,9}, AxesLabel {t, }]
(* Program Mathematica 6.0 untuk mencari gambar 7. Grafik laju waktu tempuh ⁄ terhadap waktu ).
ListPlot[data2,Joined True,InterpolationOrder 0,PlotStyle {Thickness[0.007],Black}, PlotRange {{-10,110},{-0.05,0.6}},AxesOrigin {-10,-0.05},AxesLabel { , }
0 20 40 60 80 100 t 0 2 4 6 8 10 12 p.v 0 20 40 60 80 100 t 10 12 14 16 18 20 t 0 20 40 60 80 100 t 0.0 0.1 0.2 0.3 0.4 0.5 0.6 dt dt
Lampiran 3. Program Mathematica 6.0 untuk simulasi model 3
Program
Mathematica6.0 yang digunakan untuk simulasi model 3 pada contoh 1 (posisi mobil)
H∗ Fungsi posisi mobil pertama∗L
s@t_D:=t2+40t+100
ProgramMathematica6.0untuk mencari posisi mobil−mobil pada contoh1Hkasus1L H∗ Program untuk mencari fungsi posisi mobil kedua dengan λ=1 ∗L
DSolveA9y'@tD+y@tD t2+40t+100,y@0D 80=,y@tD,tE 99y@tD→ −tI18+62 t+38 tt+ tt2M==
H∗ Program untuk mencari fungsi posisi mobil ketiga dengan λ=1 ∗L DSolveA9f'@tD+f@tD −tI18+62 t+38 tt+ tt2M,f@0D 50=,f@tD,tE 99f@tD→ −tI24+26 t+18 t+36 tt+ tt2M==
H∗ Program untuk mencari grafik posisi mobil−mobil model car−following pada contoh 1 Hkasus 1L∗L
a=PlotAt2+40t+100,8t, 0, 10<, PlotStyle→8Blue, [email protected]<E;
b=PlotA −tI18+62 t+38 tt+ tt2M,8t, 0, 10<, PlotStyle→8Green, [email protected]<E; c=PlotA −tI24+26 t+18t+36 tt+ tt2M,8t, 0, 10<, PlotStyle→8Red, [email protected]<E; Show@a, b, c, PlotRange→880, 10<,80, 500<<, AxesOrigin→80, 0<, AxesLabel→8t,s<D
2 4 6 8 10 t 100 200 300 400 500 s
ProgramMathematica6.0untuk mencari posisi mobil−mobil pada contoh1Hkasus2L H∗ Program untuk mencari fungsi posisi mobil kedua dengan λ=2 ∗L
DSolveA9y'@tD+2y@tD 2It2+40t+100M,y@0D 80=,y@tD,tE ::y@tD→1
2
−2 tI−1+161