RANCANG BANGUN ROBOT PEMINDAH BARANG DENGAN MENGGUNAKAN METODE ALGORITMA A-STAR
Teks penuh
Gambar

Dokumen terkait
Artikel ini memaparkan rancang bangun suatu saklar yang digerakkan oleh cam atau cam operatedswitch untuk digunakan sebagai saklar pemindah.Saklar pemindah
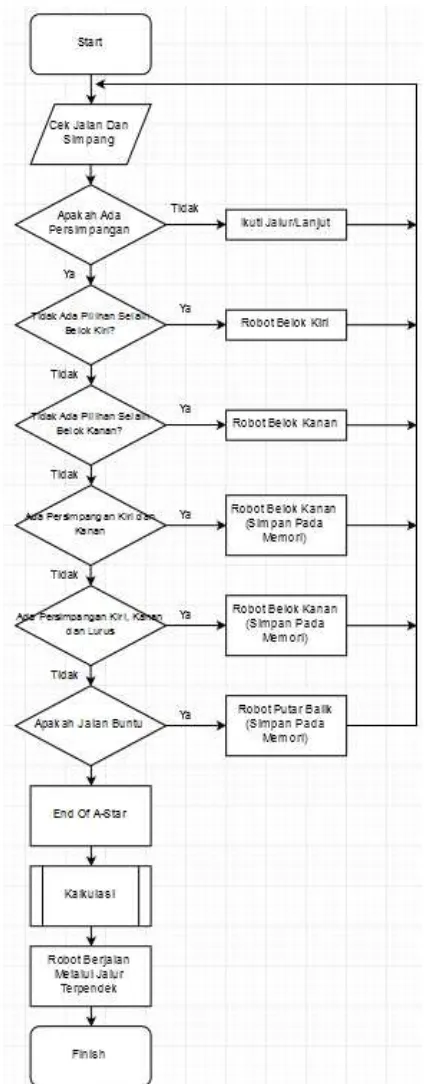
Implementasi Metode Path Finding dengan Penerapan Algoritma A-Star untuk Mencari Jalur Terpendek pada Game “Jumrah Launch Story”.. Rancangan dibuat
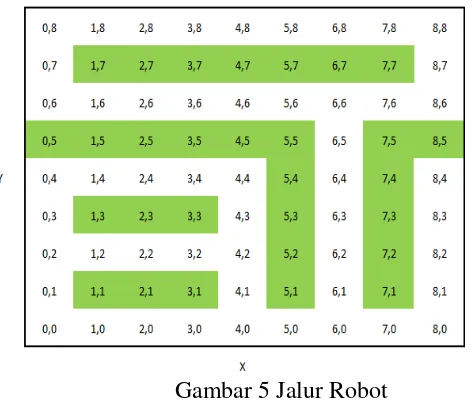
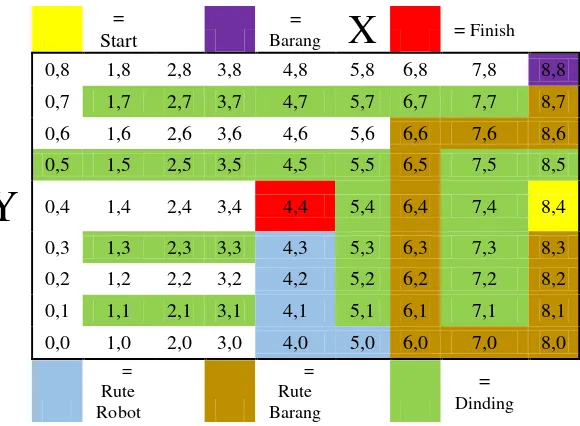
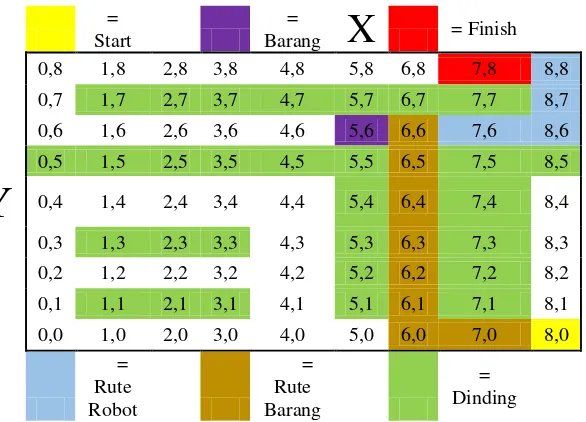
Desain Mekanik Robot Area pergerakan robot dibuat dari bahan plastik yang disablon warna (Kiyokatsu Suga, Sularso, 1991). Jalur pergerakan robot dibuat dengan warna
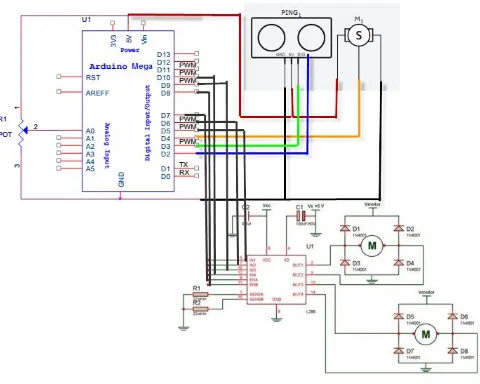
Robot micromouse ini menggunakan Algoritma PID dan rancang bangun robot micromouse ini dibuat dengan menggunakan Arduino Mega 2560 sebagai sistem kontrol, sensor kompas sebagai
Artikel ini memaparkan rancang bangun suatu saklar yang digerakkan oleh cam atau cam operatedswitch untuk digunakan sebagai saklar pemindah.Saklar pemindah
RANCANG BANGUN MECHANICAL ARM ROBOT UNTUK PEMINDAH BARANG BERDASARKAN UKURAN LAPORAN AKHIR Laporan Ini Disusun Untuk Memenuhi Syarat Menyelesaikan Pendidikan Diploma III Jurusan
Dari pertimbangan di atas, maka penulis bermaksud membuat penelitian “robot manipulator atau robot lengan pemindah barang dengan judul Rancang Bangun Robot Arm 4 DOF Berbasis
Rancang Bangun Prototype Robot Pengantar Barang Cargo Berbasis Arduino Mega dengan IoT Suyatmo1, Catra Indra cahyadi2, Syafriwel3, Rizaldy Khair4,*, Iswandi Idris4 1 Teknologi
