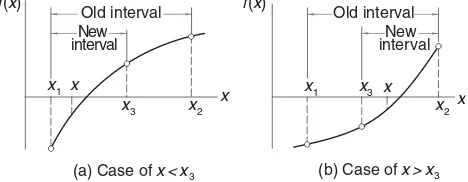
Numerical Methods in Engineering with MATLAB
®Numerical Methods in Engineering with MATLAB®is a text for engineer-ing students and a reference for practicengineer-ing engineers, especially those who wish to explore the power and efficiency of MATLAB. The choice of numerical methods was based on their relevance to engineering lems. Every method is discussed thoroughly and illustrated with prob-lems involving both hand computation and programming. MATLAB M-files accompany each method and are available on the book web site. This code is made simple and easy to understand by avoiding com-plex book-keeping schemes, while maintaining the essential features of the method. MATLAB, was chosen as the example language because of its ubiquitous use in engineering studies and practice. Moreover, it is widely available to students on school networks and through inexpen-sive educational versions. MATLAB a popular tool for teaching scientific computation.
NUMERICAL METHODS IN
ENGINEERING WITH
MATLAB
®
Jaan Kiusalaas
Cambridge, New York, Melbourne, Madrid, Cape Town, Singapore, São Paulo
Cambridge University Press
The Edinburgh Building, Cambridge
, UK
First published in print format
-
----
-
----
© Jaan Kiusalaas 2005
2005
Information on this title: www.cambridge.org/9780521852883
This publication is in copyright. Subject to statutory exception and to the provision of
relevant collective licensing agreements, no reproduction of any part may take place
without the written permission of Cambridge University Press.
-
---
-
---
Cambridge University Press has no responsibility for the persistence or accuracy of
s
for external or third-party internet websites referred to in this publication, and does not
guarantee that any content on such websites is, or will remain, accurate or appropriate.
Published in the United States of America by Cambridge University Press, New York
www.cambridge.org
hardback
eBook (NetLibrary)
eBook (NetLibrary)
Contents
Preface . . . .vii
1. Introduction to MATLAB. . . 1
2. Systems of Linear Algebraic Equations. . . 28
3. Interpolation and Curve Fitting. . . .103
4. Roots of Equations. . . .143
5. Numerical Differentiation. . . .182
6. Numerical Integration. . . .200
7. Initial Value Problems. . . .251
8. Two-Point Boundary Value Problems. . . .297
9. Symmetric Matrix Eigenvalue Problems. . . .326
10. Introduction to Optimization. . . .382
Appendices . . . .411
Index . . . .421
Preface
This book is targeted primarily toward engineers and engineering students of ad-vanced standing (sophomores, seniors and graduate students). Familiarity with a computer language is required; knowledge of basic engineering subjects is useful, but not essential.
The text attempts to place emphasis on numerical methods, not programming. Most engineers are not programmers, but problem solvers. They want to know what methods can be applied to a given problem, what are their strengths and pitfalls and how to implement them. Engineers are not expected to write computer code for basic tasks from scratch; they are more likely to utilize functions and subroutines that have been already written and tested. Thus programming by engineers is largely confined to assembling existing pieces of code into a coherent package that solves the problem at hand.
The “piece” of code is usually a function that implements a specific task. For the user the details of the code are unimportant. What matters is the interface (what goes in and what comes out) and an understanding of the method on which the algorithm is based. Since no numerical algorithm is infallible, the importance of understanding the underlying method cannot be overemphasized; it is, in fact, the rationale behind learning numerical methods.
This book attempts to conform to the views outlined above. Each numerical method is explained in detail and its shortcomings are pointed out. The examples that follow individual topics fall into two categories: hand computations that illustrate the inner workings of the method, and small programs that show how the computer code is utilized in solving a problem. Problems that require programming are marked with.
The material consists of the usual topics covered in an engineering course on numerical methods: solution of equations, interpolation and data fitting, numerical differentiation and integration, solution of ordinary differential equations and eigen-value problems. The choice of methods within each topic is tilted toward relevance
viii Preface
to engineering problems. For example, there is an extensive discussion of symmetric, sparsely populated coefficient matrices in the solution of simultaneous equations. In the same vein, the solution of eigenvalue problems concentrates on methods that efficiently extract specific eigenvalues from banded matrices.
An important criterion used in the selection of methods was clarity. Algorithms requiring overly complex bookkeeping were rejected regardless of their efficiency and robustness. This decision, which was taken with great reluctance, is in keeping with the intent to avoid emphasis on programming.
The selection of algorithms was also influenced by current practice. This dis-qualified several well-known historical methods that have been overtaken by more recent developments. For example, the secant method for finding roots of equations was omitted as having no advantages over Brent’s method. For the same reason, the multistep methods used to solve differential equations (e.g., Milne and Adams meth-ods) were left out in favor of the adaptive Runge–Kutta and Bulirsch–Stoer methods.
Notably absent is a chapter on partial differential equations. It was felt that this topic is best treated by finite element or boundary element methods, which are outside the scope of this book. The finite difference model, which is commonly introduced in numerical methods texts, is just too impractical in handling multidimensional boundary value problems.
As usual, the book contains more material than can be covered in a three-credit course. The topics that can be skipped without loss of continuity are tagged with an asterisk (*).
The programs listed in this book were tested with MATLAB® 6.5.0 and under Windows®XP. The source code can be downloaded from the book’s website at
www.cambridge.org/0521852889
1
Introduction to MATLAB
1.1
General Information
Quick Overview
This chapter isnotintendedtobeacomprehensivemanual of MATLABR .Oursole
aim is toprovide sufficientinformationtogiveyou a goodstart.Ifyou are familiar withanothercomputerlanguage,and weassume thatyou are,itisnotdifficult topick
uptherestasyou go.
MATLAB isahigh-level computerlanguage forscientific computing and data vi -sualization builtaround an interactiveprogrammingenvironment.Itisbecomingthe
premiereplatformforscientific computing at educationalinstitutionsand research establishments.Thegreatadvantage ofan interactive system is thatprograms can be tested and debuggedquickly,allowingtheuserto concentratemore ontheprinciples
behindtheprogram andless on programming itself. Since thereisnoneedto com
-pile, linkandexecuteaftereach correction, MATLAB programs can bedeveloped in much shortertime thanequivalentFORTRAN or C programs.Onthenegative side, MATLAB doesnotproduce stand-aloneapplications—theprograms can berunonly
oncomputers that have MATLAB installed.
MATLAB has other advantages over mainstreamlanguages that contribute to
rapid program development:
r MATLABcontainsalargenumberof functions thataccessproven numerical li
-braries, suchasLINPACKand EISPACK.Thismeans thatmanycommontasks (e.g., solutionof simultaneous equations) can beaccomplished withasingle function
call.
r Thereis extensivegraphics support thatallows theresults of computations tobe
plotted withafewstatements.
r Allnumerical objectsare treated asdouble-precision arrays.Thus thereisnoneed
todeclaredatatypesandcarryout type conversions.
2 Introduction to MATLAB
The syntaxof MATLAB resembles that ofFORTRAN.Togetan ideaof the similari -ties, letus compare the codeswritten inthe two languages forsolutionof simultaneous equationsAx=bbyGauss elimination.Hereis the subroutinein FORTRAN90:
subroutine gauss(A,b,n)
use prec_mod
implicit none
real(DP), dimension(:,:), intent(in out) :: A
real(DP), dimension(:), intent(in out) :: b
integer, intent(in) :: n
real(DP) :: lambda
integer :: i,k
! ---Elimination
phase---do k = 1,n-1
do i = k+1,n
if(A(i,k) /= 0) then
lambda = A(i,k)/A(k,k)
A(i,k+1:n) = A(i,k+1:n) - lambda*A(k,k+1:n)
b(i) = b(i) - lambda*b(k)
end if
end do
end do
! ---Back substitution
phase---do k = n,1,-1
b(k) = (b(k) - sum(A(k,k+1:n)*b(k+1:n)))/A(k,k)
end do
return
end subroutine gauss
The statementuse prec modtells the compilerto loadthemoduleprec mod
(not shownhere),whichdefines thewordlengthDPfor floating-pointnumbers. Also
note theuse ofarraysections, suchasa(k,k+1:n),afeature thatwasnotavailable
in previousversions ofFORTRAN.
The equivalent MATLABfunction is (MATLAB doesnot have subroutines):
function b = gauss(A,b)
n = length(b);
%---Elimination
phase---for k = 1:n-1
3 1.1 General Information if A(i,k) ˜= 0
lambda = A(i,k)/A(k,k);
A(i,k+1:n) = A(i,k+1:n) - lambda*A(k,k+1:n);
b(i)= b(i) - lambda*b(k);
end
end
end
%---Back substitution
phase---for k = n:-1:1
b(k) = (b(k) - A(k,k+1:n)*b(k+1:n))/A(k,k);
end
Simultaneous equations can alsobe solved inMATLAB with the simple command A\b(seebelow).
MATLABcan be operated intheinteractivemode throughits command window,
where each command is executed immediately upon its entry.Inthismode MATLAB acts likeanelectronic calculator.Hereisanexample ofan interactive sessionforthe solutionof simultaneous equations:
>> A = [2 1 0; -1 2 2; 0 1 4]; % Input 3 x 3 matrix
>> b = [1; 2; 3]; % Input column vector
>> soln = A\b % Solve A*x = b by left division
soln =
0.2500
0.5000
0.6250
The symbol>>is MATLAB’sprompt for input.Thepercent sign(%)marks the
beginningofacomment. Asemicolon(;) has two functions: it suppressesprintout ofintermediateresultsandseparates the rows ofa matrix. Withoutaterminating
semicolon, theresult ofacommand would bedisplayed. Forexample, omissionof the last semicolon inthe linedefiningthematrixAwould resultin
>> A = [2 1 0; -1 2 2; 0 1 4]
A =
2 1 0
-1 2 2
4 Introduction to MATLAB
Functionsand programs can be created with the MATLABeditor/debugger and
saved with the.mextension(MATLABcalls themM-files).Thefilename ofasaved
functionshould beidentical to thename of the function. Forexample,if the function
forGauss eliminationlisted aboveis saved asgauss.m,it can be called just likeany
MATLABfunction:
>> A = [2 1 0; -1 2 2; 0 1 4];
>> b = [1; 2; 3];
>> soln = gauss(A,b)
soln =
0.2500
0.5000
0.6250
1.2
Data Types and Variables
Data Types
The most commonly used MATLAB data types, orclasses, are double, charand logical, all of which are considered by MATLAB as arrays. Numerical objects
belong to the class double,whichrepresentsdouble-precision arrays; a scalar is treated as a 1×1 array.The elements ofa chartype array are strings (sequences of characters),whereasalogicaltypearrayelementmaycontainonly 1(true) or0 (false).
Another important class isfunction handle,whichisunique to MATLAB.It containsinformation requiredtofind andexecuteafunction.Thename ofafunction
handle consists of the character@, followed bythename of the function;e.g.,@sin. Functionhandlesareused asinputargumentsinfunctioncalls. Forexample, suppose thatwe haveaMATLABfunctionplot(func,x1,x2)thatplotsany user-specified
functionfuncfromx1tox2.The functioncall toplot sinx from0 toπwould be
plot(@sin,0,pi).
Thereare other datatypes,butwe seldomcomeacross them inthis text. Additional classes can bedefined bytheuser.The class ofanobject can bedisplayed with the
classcommand. Forexample,
>> x = 1 + 3i % Complex number
>> class(x)
ans =
5 1.2 Data Types and Variables
Variables
Variablenames,whichmust startwithaletter,arecase sensitive.Hencexstartand xStartrepresent twodifferentvariables.The length of thenameisunlimited,but onlythefirstNcharactersare significant.TofindNfor your installationof MATLAB,
use the commandnamelengthmax:
>> namelengthmax
ans =
63
Variables thatare defined within aMATLAB function are localintheirscope.
They arenotavailable to other parts of theprogram and donotremain in memory afterexitingthe function(thisapplies tomostprogramminglanguages).However,
variables can be shared between afunction andthe calling program if they aredeclared global. Forexample,by placingthe statementglobal X Yin afunction aswellas the calling program, thevariablesXandYare shared betweenthe twoprogram units.
Therecommended practiceis touse capital letters for globalvariables.
MATLABcontains severalbuilt-inconstantsandspecialvariables,mostimportant ofwhichare
ans Defaultname for results
eps Smallestnumberfor which1 + eps > 1
inf Infinity
NaN Nota number
i or j √−1
pi π
realmin Smallestusablepositivenumber
realmax Largestusablepositivenumber
Hereareafewof examples:
>> warning off % Suppresses print of warning messages
>> 5/0
ans =
Inf
6 Introduction to MATLAB ans =
NaN
>> 5*NaN % Most operations with NaN result in NaN
ans =
NaN
>> NaN == NaN % Different NaN’s are not equal!
ans =
0
>> eps
ans =
2.2204e-016
Arrays
Arrays can be created inseveralways.One of them is to type the elements of thearray between brackets.The elementsineachrow mustbe separated by blanks orcommas.
Hereisanexample ofgenerating a 3×3 matrix:
>> A = [ 2 -1 0
-1 2 -1
0 -1 1]
A =
2 -1 0
-1 2 -1
0 -1 1
The elements can alsobe typedon asingle line, separatingtherowswith semi -colons:
>> A = [2 -1 0; -1 2 -1; 0 -1 1]
A =
2 -1 0
-1 2 -1
0 -1 1
Unlikemost computerlanguages, MATLAB differentiatesbetween row and
7 1.2 Data Types and Variables
>> b = [1 2 3] % Row vector
b =
1 2 3
>> b = [1; 2; 3] % Column vector
b =
1
2
3
>> b = [1 2 3]’ % Transpose of row vector
b =
1
2
3
The single quote (’)is thetranspose operatorinMATLAB;thusb’is the transpose ofb.
The elements ofa matrix, suchas
A=
⎡
⎢ ⎣
A11 A12 A13
A21 A22 A23
A31 A32 A33 ⎤
⎥ ⎦
can beaccessed with the statementA(i,j),whereiandjare therow andcolumn
numbers,respectively. Asectionofan array can be extracted by theuse of colon notation.Hereisan illustration:
>> A = [8 1 6; 3 5 7; 4 9 2]
A =
8 1 6
3 5 7
4 9 2
>> A(2,3) % Element in row 2, column 3
ans =
7
8 Introduction to MATLAB ans =
1
5
9
>> A(2:3,2:3) % The 2 x 2 submatrix in lower right corner
ans =
5 7
9 2
Arrayelements can alsobeaccessed withasingleindex.ThusA(i)extracts the
ith element ofA, countingthe elementsdownthe columns. Forexample,A(7)and A(1,3)wouldextract the same element from a 3×3 matrix.
Cells
Acellarray isasequence ofarbitraryobjects. Cellarrays can be created byenclosing
theircontentsbetween braces{}. Forexample,acellarraycconsistingof three cells can be created by
>> c = {[1 2 3], ’one two three’, 6 + 7i}
c =
[1x3 double] ’one two three’ [6.0000+ 7.0000i]
As seen above, the contents of some cellsarenotprinted inorderto save space.
Ifall contentsare tobedisplayed,use thecelldispcommand:
>> celldisp(c)
c{1} =
1 2 3
c{2} =
one two three
c{3} =
6.0000 + 7.0000i
Bracesarealsousedto extract the contents of the cells:
>> c{1} % First cell
ans =
9 1.3 Operators
>> c{1}(2) % Second element of first cell
ans =
2
>> c{2} % Second cell
ans =
one two three
Strings
Astring isasequence of characters; itis treated byMATLAB asacharacter array. Strings
are created byenclosingthe charactersbetweensingle quotes.They are concatenated with the functionstrcat,whereasacolonoperator(:)isusedto extracta portionof the string. Forexample,
>> s1 = ’Press return to exit’; % Create a string
>> s2 = ’ the program’; % Create another string
>> s3 = strcat(s1,s2) % Concatenate s1 and s2
s3 =
Press return to exit the program
>> s4 = s1(1:12) % Extract chars. 1-12 of s1
s4 =
Press return
1.3
Operators
Arithmetic Operators
MATLABsupports theusualarithmetic operators:
+ Addition
− Subtraction
∗ Multiplication
ˆ Exponentiation
When appliedtomatrices, they performthe familiar matrixoperations,asillu s-trated below.
>> A = [1 2 3; 4 5 6]; B = [7 8 9; 0 1 2];
10 Introduction to MATLAB ans =
8 10 12
4 6 8
>> A*B’ % Matrix multiplication
ans =
50 8
122 17
>> A*B % Matrix multiplication fails
??? Error using ==> * % due to incompatible dimensions
Inner matrix dimensions must agree.
Thereare twodivisionoperatorsinMATLAB:
/ Rightdivision
\ Leftdivision
Ifaandbare scalars, therightdivisiona/bresultsinadivided byb,whereas the left
division is equivalent to b/a.Inthe casewhereAandBarematrices,A/Breturns the solutionofX*A = BandA\Byields the solutionofA*X = B.
Often weneedtoapplythe*,/andˆoperations tomatricesin anelement-by -element fashion.This can be doneby precedingthe operator witha period(.)as follows:
.* Element-wisemultiplication
./ Element-wisedivision
.ˆ Element-wise exponentiation
Forexample, the computationCij =AijBijcan beaccomplished with
>> A = [1 2 3; 4 5 6]; B = [7 8 9; 0 1 2];
>> C = A.*B
C =
7 16 27
11 1.3 Operators
Comparison Operators
The comparison(relational) operatorsreturn 1fortrueand0 forfalse.These operators
are
< Less than
> Greaterthan
<= Less thanorequal to
>= Greaterthanorequal to
== Equal to
˜= Not equal to
The comparisonoperatorsalwaysact element-wise on matrices;hence they resultin a matrixoflogicaltype. Forexample,
>> A = [1 2 3; 4 5 6]; B = [7 8 9; 0 1 2];
>> A > B
ans =
0 0 0
1 1 1
Logical Operators
The logical operatorsinMATLAB are
& AND
| OR
˜ NOT
They areusedto build compound relational expressions,an example of whichis shown below.
>> A = [1 2 3; 4 5 6]; B = [7 8 9; 0 1 2];
>> (A > B) | (B > 5)
ans =
1 1 1
12 Introduction to MATLAB
1.4
Flow Control
Conditionals
if, else, elseif
Theifconstruct
if condition block end
executes the blockof statements if thecondition is true.If the condition is false, theblock skipped.Theifconditional can be followed by any numberofelseif
constructs:
if condition block
elseif condition block
.. . end
whichworkinthe samemanner.Theelseclause
.. . else
block end
can beusedtodefine theblock of statementswhichare tobe executed ifnone of theif-elseifclausesare true.The functionsignumbelow illustrates theuse of the conditionals.
function sgn = signum(a)
if a > 0
sgn = 1;
elseif a < 0
sgn = -1;
13 1.4 Flow Control sgn = 0;
end
>> signum (-1.5)
ans =
-1
switch
Theswitchconstructis
switchexpression
casevalue1
block casevalue2
block ..
.
otherwise
block end
Here theexpressionis evaluated andthe controlispassedto thecasethatmatches the
value. For instance,if thevalue ofexpressionis equal tovalue2, theblockof statements following casevalue2is executed. If thevalue ofexpression doesnot matchany
of thecasevalues, the controlpasses to the optionalotherwiseblock.Hereisan
example:
function y = trig(func,x)
switch func
case ’sin’
y = sin(x);
case ’cos’
y = cos(x);
case ’tan’
y = tan(x);
otherwise
error(’No such function defined’)
end
>> trig(’tan’,pi/3)
ans =
14 Introduction to MATLAB
Loops
while
Thewhileconstruct
whilecondition:
block end
executesablockof statementsif theconditionis true. Afterexecutionof theblock,
conditionis evaluated again.Ifitis still true, theblockis executed again.Thisprocess
is continued until theconditionbecomes false.
The followingexample computes thenumberofyearsit takes for a$1000principal togrowto $10,000at6%annualinterest.
>> p = 1000; years = 0;
>> while p < 10000
years = years + 1;
p = p*(1 + 0.06);
end
>> years
years =
40
for
Theforloop requiresatargetand asequenceover which the target loops.The form
of the constructis
for target = sequence block
end
Forexample, to compute cosxfromx=0 toπ /2 atincrements ofπ /10we could use
>> for n = 0:5 % n loops over the sequence 0 1 2 3 4 5
y(n+1) = cos(n*pi/10);
end
>> y
y =
15 1.4 Flow Control
Loops should beavoided whenever possibleinfavorofvectorizedexpressions,
which executemuch faster. A vectorizedsolutionto the last computation would be
>> n = 0:5;
>> y = cos(n*pi/10)
y =
1.0000 0.9511 0.8090 0.5878 0.3090 0.0000
break
Anyloopcan be terminated bythebreakstatement.Uponencountering abreak
statement, the controlispassedto thefirst statement outside the loop.Inthe fol-lowingexample the functionbuildvecconstructsa row vectorofarbitrarylength
by promptingfor its elements.Theprocessis terminated when anemptyelementis encountered.
function x = buildvec
for i = 1:1000
elem = input(’==> ’); % Prompts for input of element
if isempty(elem) % Check for empty element
break
end
x(i) = elem;
end
>> x = buildvec
==> 3
==> 5
==> 7
==> 2
==>
x =
3 5 7 2
continue
Whenthecontinuestatementis encountered in a loop, the controlispassed to thenextiteration without executingthe statementsinthe currentiteration. Asan illustration, considerthe followingfunctionthat stripsall theblanks fromthe strings1:
function s2 = strip(s1)
s2 = ’’; % Create an empty string
16 Introduction to MATLAB if s1(i) == ’ ’
continue
else
s2 = strcat(s2,s1(i)); % Concatenation
end
end
>> s2 = strip(’This is too bad’)
s2 =
Thisistoobad
return
Afunction normally returns to the calling program when itruns out of statements.
However, the functioncan be forcedto exitwith thereturncommand.Inthe ex
-amplebelow, the functionsolveuses the Newton–Raphson methodtofindthe zero of f(x)=sinx−0.5x.Theinput x(guess of the solution)is refined insuccessive
iterationsusingthe formulax←x+x,wherex= −f(x)/f′(x),until the change xbecomes sufficientlysmall.Theprocedureis thenterminated with thereturn
statement.Theforloop assures that thenumberofiterationsdoesnot exceed 30,
which should bemore thanenough forconvergence.
function x = solve(x)
for numIter = 1:30
dx = -(sin(x) - 0.5*x)/(cos(x) - 0.5); % -f(x)/f’(x)
x = x + dx;
if abs(dx) < 1.0e-6 % Check for convergence
return
end
end
error(’Too many iterations’)
>> x = solve(2)
x =
1.8955
error
Executionofa programcan be terminated and a messagedisplayed with theerror
function
error(’message’)
17 1.5 Functions
[m,n] = size(A); % m = no. of rows; n = no. of cols.
if m ˜= n
error(’Matrix must be square’)
end
1.5
Functions
Function Definition
Thebodyofafunction mustbepreceded bythe function definitionline
function[output args]=function name(input arguments)
Theinput andoutputarguments must be separated bycommas.The numberof
argumentsmay be zero.If thereis onlyone outputargument, the enclosing brackets
may be omitted.
Tomake the function accessible to other programsunits,itmustbe saved under
thefilenamefunction name.m.Thisfilemaycontainotherfunctions, calledsubfunc
-tions.The subfunctions can be calledonly bytheprimaryfunctionfunction nameor
othersubfunctionsinthefile;they arenotaccessible to other program units.
Calling Functions
Afunction may be called with fewer arguments than appear inthe function defini -tion.Thenumberofinputandoutputargumentsused inthe functioncall can be
determined bythe functionsnarginandnargout,respectively.The followingexam
-ple showsa modified versionof the functionsolvethatinvolves twoinputandtwo outputarguments.The errortoleranceepsilonisanoptionalinput thatmay beused
to override thedefaultvalue1.0e-6.The outputargumentnumIter,which contains thenumberofiterations,may alsobe omittedfromthe functioncall.
function [x,numIter] = solve(x,epsilon)
if nargin == 1 % Specify default value if
epsilon = 1.0e-6; % second input argument is
end % omitted in function call
for numIter = 1:100
dx = -(sin(x) - 0.5*x)/(cos(x) - 0.5);
x = x + dx;
if abs(dx) < epsilon % Converged; return to
return % calling program
18 Introduction to MATLAB end
error(’Too many iterations’)
>> x = solve(2) % numIter not printed
x =
1.8955
>> [x,numIter] = solve(2) % numIter is printed
x =
1.8955
numIter =
4
>> format long
>> x = solve(2,1.0e-12) % Solving with extra precision
x =
1.89549426703398
>>
Evaluating Functions
Letus consider aslightly differentversionof the functionsolveshown below.The expressionfordx,namelyx= −f(x)/f′(x),isnowcoded inthe functionmyfunc, so thatsolvecontainsacall tomyfunc.Thiswillworkfine,providedthatmyfuncis stored underthefilenamemyfunc.mso that MATLABcan find it.
function [x,numIter] = solve(x,epsilon)
if nargin == 1; epsilon = 1.0e-6; end
for numIter = 1:30
dx = myfunc(x);
x = x + dx;
if abs(dx) < epsilon; return; end
end
error(’Too many iterations’)
function y = myfunc(x)
y = -(sin(x) - 0.5*x)/(cos(x) - 0.5);
>> x = solve(2)
x =
19 1.5 Functions
Intheaboveversionofsolvethe function returningdxis stuckwith thename
myfunc.Ifmyfuncisreplaced withanotherfunction name,solvewillnotworkunless the correspondingchangeismadein its code.In general,itisnota good ideatoalter
computercode that hasbeentested and debugged; alldatashould be communicated
toa functionthroughitsarguments.MATLAB makes this possibleby passing the functionhandle ofmyfunctosolveasan argument,asillustrated below.
function [x,numIter] = solve(func,x,epsilon)
if nargin == 2; epsilon = 1.0e-6; end
for numIter = 1:30
dx = feval(func,x); % feval is a MATLAB function for
x = x + dx; % evaluating a passed function
if abs(dx) < epsilon; return; end
end
error(’Too many iterations’)
>> x = solve(@myfunc,2) % @myfunc is the function handle
x =
1.8955
The callsolve(@myfunc,2)createsafunctionhandle tomyfuncand passesit tosolveasan argument.Hence thevariable funcinsolvecontains the handle tomyfunc. Afunction passedtoanotherfunction by its handleis evaluated bythe MATLABfunction
feval(function handle,arguments)
It isnow possible tousesolve tofind azero ofany f(x)bycodingthe function
x= −f(x)/f′(x)and passing its handle tosolve.
In-Line Functions
If the function is not overly complicated, it can also be represented as an inline
object:
f unction name=inline(’expression’,’var1’,’var2’,. . .)
whereexpressionspecifies the function andvar1,var2,. . . are thenames of theind
e-pendentvariables.Hereisanexample:
>> myfunc = inline (’xˆ2 + yˆ2’,’x’,’y’);
>> myfunc (3,5)
ans =
20 Introduction to MATLAB
Theadvantage ofan in-line function is thatit can be embedded inthebodyof the code; itdoesnot have toresidein anM-file.
1.6
Input/Output
Reading Input
The MATLABfunctionfor receiving user inputis
value = input(’prompt’)
Itdisplaysa promptandthen waits for input.If theinputisanexpression,itis evalu
-ated and returned invalue.The followingtwo samplesillustrate theuse ofinput:
>> a = input(’Enter expression: ’)
Enter expression: tan(0.15)
a =
0.1511
>> s = input(’Enter string: ’)
Enter string: ’Black sheep’
s =
Black sheep
Printing Output
Asmentioned before, theresult ofastatementisprinted if the statementdoesnot end withasemicolon.Thisis the easiestwayofdisplaying resultsinMATLAB.Normally
MATLAB displaysnumericalresultswithaboutfivedigits,but this can be changed with the format command:
format long switches to16-digitdisplay
format short switches to5-digitdisplay
Toprint formattedoutput,use thefprintffunction:
fprintf(’format’,list)
where format contains formatting specifications andlist is the list ofitems tobe
21 1.7 Array Manipulation
%w.df Floating pointnotation %w.de Exponentialnotation \n Newline character
wherewis thewidth of thefield anddis thenumberofdigitsafterthedecimalpoint. Linebreakis forced bythenewline character.The followingexampleprintsaformatted
table of sinxvs.xatintervals of 0.2:
>> x = 0:0.2:1;
>> for i = 1:length(x)
fprintf(’%4.1f %11.6f\n’,x(i),sin(x(i)))
end
0.0 0.000000
0.2 0.198669
0.4 0.389418
0.6 0.564642
0.8 0.717356
1.0 0.841471
1.7
Array Manipulation
Creating Arrays
We learned before thatan arraycan be created bytyping its elementsbetween brackets:
>> x = [0 0.25 0.5 0.75 1]
x =
0 0.2500 0.5000 0.7500 1.0000
Colon Operator
Arrayswith equallyspacedelements can alsobe constructed with the colonoperator.
x = first elem:increment:last elem
Forexample,
>> x = 0:0.25:1
x =
22 Introduction to MATLAB
linspace
Another means of creating an array with equallyspacedelementsis thelinspace
function.The statement
x = linspace(xfirst,xlast,n)
createsan arrayofnelements starting withxfirstandending withxlast.Hereisan illustration:
>> x = linspace(0,1,5)
x =
0 0.2500 0.5000 0.7500 1.0000
logspace
The functionlogspaceis the logarithmic counterpart oflinspace.The call
x = logspace(zfirst,zlast,n)
createsnlogarithmicallyspacedelements starting withx=10zf irstandending with
x=10zlast.Hereisanexample:
>> x = logspace(0,1,5)
x =
1.0000 1.7783 3.1623 5.6234 10.0000
zeros
The functioncall
X = zeros(m,n)
returnsa matrixofmrowsandncolumns thatisfilled with zeroes. Whenthe fun -ction is called withasingleargument, e.g.,zeros(n),an×nmatrix is created.
ones
X = ones(m,n)
The functiononesworksinthemanner aszeros,butfills thematrix with ones.
rand
X = rand(m,n)
23 1.7 Array Manipulation
eye
The functioneye
X = eye(n)
createsann×nidentity matrix.
Array Functions
TherearenumerousarrayfunctionsinMATLABthatperform matrixoperationsand
other useful tasks.Hereareafew basic functions:
length
The lengthn(numberof elements) ofa vectorxcan bedetermined with the function length:
n= length(x)
size
If the functionsizeis called withasingleinputargument:
[m,n] = size(X)
itdetermines thenumberofrowsmand numberof columnsninthematrix X.If called with twoinputarguments:
m= size(X,dim)
itreturns the length of Xinthe specified dimension(dim= 1yields thenumberof
rows,anddim=2 gives thenumberof columns).
reshape
Thereshape function isusedtorearrange the elements ofa matrix.The call
Y = reshape(X,m,n)
returnsam×nmatrixthe elements ofwhichare takenfrom matrixXinthe column
-wise order.The totalnumberof elementsin Xmustbe equal tom×n.Hereisan
24 Introduction to MATLAB >> a = 1:2:11
a =
1 3 5 7 9 11
>> A = reshape(a,2,3)
A =
1 5 9
3 7 11
dot
a= dot(x,y)
This function returns thedotproduct of twovectorsxandywhichmustbe of the same length.
prod
a= prod(x)
For a vectorx,prod(x)returns theproduct ofits elements.Ifxisa matrix, thenaisa row vectorcontainingtheproducts overeach column. Forexample,
>> a = [1 2 3 4 5 6];
>> A = reshape(a,2,3)
A =
1 3 5
2 4 6
>> prod(a)
ans =
720
>> prod(A)
ans =
2 12 30
sum
a = sum(x)
25 1.8 Writing and Running Programs
cross
c= cross(a,b)
The functioncrosscomputes the crossproduct:c=a×b,wherevectorsaandb
mustbe of length3.
1.8
Writing and Running Programs
MATLABhas twowindowsavailable fortyping programlines:thecommand window
andtheeditor/debugger.The command window isalwaysintheinteractivemode, so thatanystatement entered into thewindow isimmediately processed.Theinteractive
modeisa good wayto experimentwith the languageandtryoutprogramming ideas.
MATLABopens the editor window when a newM-fileis created, or anexisting file
is opened.The editor window isusedto typeandsaveprograms (calledscriptfilesin
MATLAB)andfunctions.One could alsouseatext editorto enter programlines,but the MATLABeditorhas MATLAB-specific features, suchas colorcoding and automatic
indentation, thatmakework easier. Beforea programorfunctioncan be executed,it
mustbe saved asaMATLABM-file (recall that thesefiles have the.mextension). A programcan berun by invokingtheruncommandfromthe editor’sdebugmenu.
When afunction is calledforthefirst timeduring a program run,itis compiled into P-code (pseudo-code) to speed upexecution insubsequent calls to the function.
One can also create the P-code ofafunction andsaveit on diskby issuingthe command
pcodefunction name
MATLAB will thenloadthe P-code (which has the.pextension)into thememory ratherthanthe textfile.
The variables created during a MATLAB session are saved in the MATLAB
workspaceuntil they are cleared. Listingof the saved variables can bedisplayed bythe commandwho.Ifgreater detailabout thevariablesisrequired, typewhos.Variables can be clearedfromtheworkspacewith the command
cleara b. . .
26 Introduction to MATLAB
Assistance on anyMATLABfunction isavailablebytyping
helpfunction name
inthe command window.
1.9
Plotting
MATLABhas extensiveplottingcapabilities.Hereweillustrate somebasic commands fortwo-dimensionalplots.The examplebelow plots sinxandcosxonthe sameplot.
>> x = 0:0.2:pi; % Create x-array
>> y = sin(x); % Create y-array
>> plot(x,y,’k:o’) % Plot x-y points with specified color
% and symbol (’k’ = black, ’o’ = circles)
>> hold on % Allow overwriting of current plot
>> z = cos(x); % Create z-array
>> plot(x,z,’k:x’) % Plot x-z points (’x’ = crosses)
>> grid on % Display coordinate grid
>> xlabel(’x’) % Display label for x-axis
>> ylabel(’y’) % Display label for y-axis
>> gtext(’sin x’) % Create mouse-movable text
27 1.9 Plotting
Afunctionstored in aM-file can beplotted withasingle command,as shown below.
function y = testfunc(x) % Stored function
y = (x.ˆ3).*sin(x) - 1./x;
>> fplot(@testfunc,[1 20]) % Plot from x = 1 to 20
>> grid on
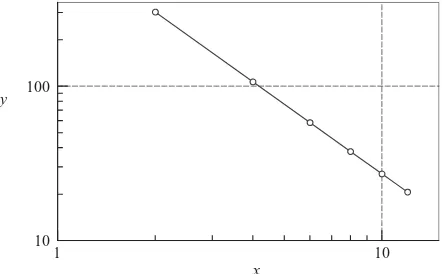
Theplotsappearing inthisbook fromhere on werenotproduced byMATLAB. Weusedthe copy/paste operationto transferthenumericaldatatoaspreadsheet
2
Systems of Linear Algebraic Equations
Solve the simultaneous equationsAx=b
2.1
Introduction
Inthis chapter we lookat the solutionofnlinear,algebraic equationsinnunknowns.
It is byfarthe longest and arguably themostimportant topicin thebook.There
is a good reasonforthis—itis almost impossible to carryoutnumerical analysis ofanysortwithout encounteringsimultaneous equations.Moreover, equationsets
arisingfrom physicalproblems are often verylarge, consuming alot of computa -tionalresources.Itusually possible toreduce the storagerequirementsandtherun
time byexploiting specialproperties of the coefficientmatrix, suchas sparseness (most elements ofasparsematrix are zero).Hence therearemany algorithmsded
-icatedto the solutionof large sets of equations, each onebeingtailoredtoa parti
c-ularformof the coefficientmatrix(symmetric,banded, sparse, etc.). A well-known
collectionof theseroutinesisLAPACK –Linear AlgebraPACKage, originally written in Fortran771.
We cannotpossibly discussall the specialalgorithmsinthe limitedspaceavai
l-able.Thebestwe can dois topresent thebasicmethods of solution, supplemented by afew usefulalgorithms for banded andsparse coefficientmatrices.
Notation
Asystemofalgebraic equations has the form
1 LAPACKis the successorofLINPACK,a 1970sand 80s collectionofFortransubroutines.
30 Systems of Linear Algebraic Equations
secondequation.Thenumberof such combinationsisinfinite.Onthe otherhand, the equations
2x+y=3 4x+2y=0
haveno solution because the secondequation,beingequivalent to2x+y=0, con -tradicts thefirst one.Therefore,anysolutionthat satisfies one equationcannot satisfy
the otherone.
Ill-Conditioning
Anobvious question is: what happenswhenthe coefficientmatrix isalmost singular; i.e.,if|A|isverysmall? Inordertodeterminewhetherthedeterminant of the coefficient
matrix is“small,” weneed a referenceagainstwhich thedeterminant can bemeasured.
Thisreferenceis calledthenormof thematrix,denoted byA. We canthensaythat thedeterminantis smallif
|A|<<A
Severalnorms ofa matrixhavebeen defined inexistingliterature, suchas
A =
n
i=1
n
j=1
A2
ij A =1max
≤i≤n n
j=1 Aij
(2.5a)
Aformalmeasure of conditioning is thematrixcondition number,defined as
cond(A)= AA−1
(2.5b)
If thisnumber is close tounity, thematrix iswell-conditioned.The condition number increaseswith thedegree ofill-conditioning,reaching infinityfor asingular matrix.
Note that the condition number isnotunique,butdepends onthe choice of thematrix norm.Unfortunately, the condition number is expensive to compute forlargematri -ces.In most casesitis sufficient togauge conditioning bycomparingthedeterminant
with themagnitudes of the elementsinthematrix.
If the equationsareill-conditioned, small changesinthe coefficientmatrix result
inlarge changesinthe solution. Asan illustration, considerthe equations
2x+y=3 2x+1.001y=0
that have the solutionx=1501.5,y= −3000. Since|A| =2(1.001)−2(1)=0.002 is
much smallerthanthe coefficients, the equationsareill-conditioned.The effect of
ill-conditioningcan beverified bychangingthe secondequationto2x+1.002y=0
31 2.1 Introduction
Numerical solutions ofill-conditionedequationsarenot tobe trusted.Thereason is that theinevitableroundoff errorsduringthe solution processare equivalent toin -troducingsmall changesinto the coefficientmatrix.Thisinturn introduces large errors
into the solution, themagnitude ofwhichdepends onthe severityofill-conditioning.
Insuspect cases thedeterminant of the coefficientmatrixshould be computedso that thedegree ofill-conditioningcan be estimated.This can bedoneduringor afterthe solution with only asmall computational effort.
Linear Systems
Linear,algebraic equations occur in almostallbranches ofnumericalanalysis. But their mostvisibleapplication inengineering isintheanalysis of linearsystems (any
system whoseresponseisproportional to theinputisdeemedtobe linear). Linear
systemsinclude structures, elastic solids, heatflow, seepage offluids, electromagnetic
fieldsandelectric circuits; i.e.,most topics taughtin anengineeringcurriculum.
If the system isdiscrete, suchasatruss or anelectric circuit, then itsanalysis leadsdirectly to linear algebraic equations.Inthe case of astatically determinate truss, forexample, the equationsarisewhenthe equilibriumconditions of thejoints
arewritten down.Theunknownsx1,x2, . . . ,xnrepresent the forcesinthemembers
andthe supportreactions,andthe constantsb1,b2, . . . ,bnare theprescribedexternal loads.
Thebehaviorof continuous systemsisdescribed by differential equations,rather
than algebraic equations.However,becausenumericalanalysis can deal only with
discretevariables,itisfirstnecessarytoapproximatea differential equation witha
systemofalgebraic equations.Thewell-known finitedifference,finite elementand boundaryelementmethods ofanalysisworkinthismanner.They usedifferentap
-proximations toachieve the“discretization,” butineach case thefinal taskis the same:
solveasystem(often a verylarge system) of linear,algebraic equations.
Insummary, themodelingof linearsystemsinvariably givesrise to equations of the formAx=b,wherebis theinputandxrepresents theresponse of the system.
The coefficientmatrixA,whichreflects the characteristics of the system,isind
e-pendent of theinput.Inother words,if theinputis changed, the equations have to
be solved again witha differentb,but the sameA.Therefore,itisdesirable to have
anequation-solving algorithmthat canhandleany numberof constantvectorswith
minimal computational effort.
Methods of Solution
32 Systems of Linear Algebraic Equations
transformthe original equationsintoequivalent equations(equations that have the same solution) that can be solved more easily.The transformation is carriedoutby applyingthe three operations listed below.These so-calledelementary operationsdo
not change the solution,but they may affect thedeterminant of the coefficientmatrix asindicated in parentheses.
r Exchangingtwo equations (changes signof
|A|).
r Multiplying an equation by a nonzero constant (multiplies |A| by the same
constant).
r Multiplying anequation by a nonzero constantandthensubtracting it from an
-otherequation(leaves|A|unchanged).
Iterative, orindirect methods, startwitha guess of the solutionx,andthen r
e-peatedly refine the solution untilacertainconvergence criterion isreached.Iterative
methodsaregenerallyless efficient thantheir direct counterpartsdue to the large
numberofiterationsrequired. But they do have significant computationaladvan -tagesif the coefficientmatrix isverylargeandsparsely populated(most coefficients
are zero).
Overview of Direct Methods
Table2.1lists threepopular directmethods, each ofwhichuses elementaryoperations toproduceits own final formof easy-to-solve equations.
Method Initial form Final form
Gauss elimination Ax=b Ux=c
LUdecomposition Ax=b LUx=b
Gauss–Jordanelimination Ax=b Ix=c
Table 2.1
Intheabove tableUrepresentsan uppertriangular matrix,Lisalowertriangular matrix andI denotes the identity matrix. Asquarematrix is called triangularifit contains onlyzero elements onone side of the leading diagonal.Thusa 3×3 upper
triangular matrixhas the form
U=
⎡
⎢ ⎣
U11 U12 U13
0 U22 U23
0 0 U33 ⎤
33 2.1 Introduction
and a 3×3lowertriangular matrix appearsas
L=
⎡
⎢ ⎣
L11 0 0
L21 L22 0
L31 L32 L33 ⎤
⎥ ⎦
Triangular matricesplay an importantroleinlinear algebra, since theysimplify manycomputations. Forexample, considerthe equationsLx=c, or
L11x1 =c1
L21x1+L22x2 =c2
L31x1+L32x2+L33x3 =c3
.. .
Ifwe solve the equations forward, starting with thefirst equation, the computations
areveryeasy, since each equation wouldcontainonlyoneunknown atatime.The solution wouldthusproceed as follows:
x1 =c1/L11
x2 =(c2−L21x1)/L22
x3 =(c3−L31x1−L32x2)/L33
.. .
Thisprocedureis known asforward substitution.In asimilar way,Ux=c,encountered inGauss elimination, caneasily be solved bybacksubstitution,which startswith the last equation and proceedsbackwardthrough the equations.
The equationsLUx=b,whichareassociated withLUdecomposition, can also
be solvedquickly ifwereplace them with two sets of equivalent equations:Ly=b
andUx=y.NowLy=bcan be solvedforybyforwardsubstitution, followed bythe solutionofUx=yby means ofback substitution.
The equations Ix=c, which are produced by Gauss–Jordan elimination, are equivalent tox=c(recall theidentityIx=x), so thatcisalreadythe solution.
EXAMPLE 2.1
Determinewhetherthe following matrix is singular:
A=
⎡
⎢ ⎣
2.1 −0.6 1.1 3.2 4.7 −0.8 3.1 −6.5 4.1
⎤
35 2.2 Gauss Elimination Method
theprocedure, letus solve the equations
4x1−2x2+x3=11 (a)
−2x1+4x2−2x3= −16 (b)
x1−2x2+4x3=17 (c)
Elimination phase The elimination phaseutilizes onlyone of the elementaryop -erations listed inTable2.1—multiplyingone equation(say, equationj)by aconstant
λandsubtracting it from anotherequation(equationi).The symbolicrepresentation
of this operation is
Eq.(i)←Eq.(i)−λ× Eq.(j) (2.6)
The equation beingsubtracted,namely Eq.(j),is calledthepivot equation.
We start the elimination bytaking Eq.(a) tobe thepivot equation andchoosing
themultipliersλsoas to eliminatex1from Eqs.(b)and(c):
Eq.(b)←Eq.(b)−(−0.5)×Eq.(a)
Eq.(c)←Eq.(c)−0.25×Eq.(a)
Afterthis transformation, the equationsbecome
4x1−2x2+x3=11 (a)
3x2−1.5x3= −10.5 (b)
−1.5x2+3.75x3=14.25 (c)
This completes thefirstpass.Now wepick (b)as thepivot equation andeliminatex2
from(c):
Eq.(c)←Eq.(c)−(−0.5)×Eq.(b)
whichyields the equations
4x1−2x2+x3=11 (a)
3x2−1.5x3= −10.5 (b)
3x3=9 (c)
The elimination phaseisnowcomplete.The original equations havebeen replaced byequivalent equations that can be easilysolved by back substitution.
Aspointed outbefore, theaugmented coefficientmatrix isa more convenient
36 Systems of Linear Algebraic Equations written as
⎡
⎢ ⎣
4 −2 1 11
−2 4 −2 −16
1 −2 4 17
⎤
⎥ ⎦
andthe equivalent equationsproduced bythefirstandthe second passes of Gauss elimination would appear as
⎡
⎢ ⎣
4 −2 1 11.00 0 3 −1.5 −10.50 0 −1.5 3.75 14.25
⎤
⎥ ⎦
⎡
⎢ ⎣
4 −2 1 11.0 0 3 −1.5 −10.5
0 0 3 9.0
⎤
⎥ ⎦
It is important to note that the elementary row operation in Eq.(2.6) leaves thedeterminant of the coefficientmatrix unchanged.Thisisratherfortunate, since thedeterminant ofa triangular matrix is veryeasy to compute—itis the product of thediagonal elements (youcan verifythis quite easily).Inother words,
|A| = |U| =U11×U22× · · · ×Unn (2.7)
Back substitution phase Theunknowns can now be computed by back substitu -tion inthemanner described inthepreviousarticle. Solving Eqs.(c), (b)and(a)in
that order,weget
x3=9/3=3
x2=(−10.5+1.5x3)/3=[−10.5+1.5(3)]/3= −2
x1=(11+2x2−x3)/4=[11+2(−2)−3]/4=1
Algorithm for Gauss Elimination Method
Elimination phase Letus lookat the equationsat someinstantduringthe elim
-ination phase. Assume that thefirstkrows ofAhavealready beentransformedto
uppertriangularform.Therefore, the currentpivot equation is thekth equation,and all the equationsbelow itare still tobe transformed.This situation isdepicted bythe
augmentedcoefficientmatrixshown below.Note that the components ofAarenot the coefficients of the original equations (except forthefirstrow), since theyhave
38 Systems of Linear Algebraic Equations
the lower triangular portion of the coefficient matrix anyway, its contents are
irrelevant.
Back substitution phase AfterGauss eliminationtheaugmentedcoefficientma -trixhas the form
A b
=
⎡
⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣
A11 A12 A13 · · · A1n b1
0 A22 A23 · · · A2n b2
0 0 A33 · · · A3n b3
..
. ... ... ... ...
0 0 0 · · · Ann bn
⎤
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦
The last equation,Annxn=bn,is solved first,yielding
xn=bn/Ann (2.9)
Consider nowthe stage ofback substitution wherexn,xn−1, . . . ,xk+1havebeen
already beencomputed(inthat order),and weareabout todeterminexkfromthekth equation
Akkxk+Ak,k+1xk+1+ · · · +Aknxn=bk
The solution is
xk=
bk−
n
j=k+1
Ak jxj
1
Akk, k=n−1,n−2, . . . ,1 (2.10)
The corresponding algorithmfor back substitution is:
for k = n:-1:1
b(k) = (b(k) - A(k,k+1:n)*b(k+1:n))/A(k,k);
end
gauss
The functiongausscombines the elimination andtheback substitution phases. Dur
-ing back substitutionbis overwritten bythe solution vectorx, so thatbcontains the solution uponexit.
function [x,det] = gauss(A,b)
% Solves A*x = b by Gauss elimination and computes det(A).
% USAGE: [x,det] = gauss(A,b)
if size(b,2) > 1; b = b’; end % b must be column vector
39 2.2 Gauss Elimination Method
for k = 1:n-1 % Elimination phase
for i= k+1:n
if A(i,k) ˜= 0
lambda = A(i,k)/A(k,k);
A(i,k+1:n) = A(i,k+1:n) - lambda*A(k,k+1:n);
b(i)= b(i) - lambda*b(k);
end
end
end
if nargout == 2; det = prod(diag(A)); end
for k = n:-1:1 % Back substitution phase
b(k) = (b(k) - A(k,k+1:n)*b(k+1:n))/A(k,k);
end
x = b;
Multiple Sets of Equations
As mentioned before,it is frequently necessary to solve the equations Ax=b for
several constant vectors. Let there be m such constant vectors, denoted by
b1,b2, . . . ,bmandlet the correspondingsolution vectorsbex1,x2, . . . ,xm. Wedenote
multiple sets of equationsbyAX=B,where
X=
x1 x2 · · · xm
B=
b1 b2 · · · bm
aren×mmatriceswhose columns consist of solution vectorsandconstantvectors,
respectively.
Aneconomicalwayto handle such equationsduringthe elimination phaseis toincludeallmconstantvectorsintheaugmentedcoefficientmatrix, so that they are transformedsimultaneously with the coefficientmatrix.The solutionsare then
obtained by back substitution intheusualmanner, onevector atatime.Itwouldquite easytomake the correspondingchangesingauss.However, theLUdecomposition method,described inthenextarticle,ismoreversatileinhandling multiple constant
vectors.
EXAMPLE 2.3
Use Gauss eliminationto solve the equationsAX=B,where
A=
⎡
⎢ ⎣
6 −4 1
−4 6 −4
1 −4 6
⎤
⎥
⎦ B=
⎡
⎢ ⎣
−14 22 36 −18
6 7
⎤
41 2.2 Gauss Elimination Method
EXAMPLE 2.4
Ann×nVandermodematrixAisdefined by
Aij=vin−j, i=1,2, . . . ,n, j=1,2, . . . ,n
wherevisa vector.InMATLAB aVandermodematrixcan begenerated bythe com
-mandvander(v).Use the functiongaussto compute the solutionofAx=b,where
Ais the6×6Vandermodematrix generatedfromthevector
v=
1.0 1.2 1.4 1.6 1.8 2.0T
and
b=
0 1 0 1 0 1
T
Also evaluate the accuracy of the solution(Vandermode matrices tend to be i ll-conditioned).
Solution Weusedtheprogramshown below. AfterconstructingAandb, the output formatwas changedto longso that the solution would beprinted to14decimal
places.Hereare theresults:
% Example 2.4 (Gauss elimination)
A = vander(1:0.2:2);
b = [0 1 0 1 0 1]’;
format long
[x,det] = gauss(A,b)
x =
1.0e+004 *
0.04166666666701
-0.31250000000246
0.92500000000697
-1.35000000000972
0.97093333334002
-0.27510000000181
det =
-1.132462079991823e-006
As thedeterminantis quite smallrelative to the elements ofA(you may want to
printAtoverifythis),we expectdetectableroundoff error.Inspectionofxleadsus to suspect that the exact solution is
x=
1250/3 −3125 9250 −13500 29128/3 −2751T
42 Systems of Linear Algebraic Equations
Another waytogauge theaccuracyof the solution is to computeAxandcompare theresult tob:
>> A*x
ans =
-0.00000000000091
0.99999999999909
-0.00000000000819
0.99999999998272
-0.00000000005366
0.99999999994998
Theresult seems to confirmour previous conclusion.
2.3
LU Decomposition Methods
Introduction
Itispossible to showthatanysquarematrixAcan be expressed asa product ofalower
triangular matrixLand an uppertriangular matrixU:
A=LU (2.11)
Theprocess of computingLandUfor a givenAis known asLUdecompositionor
LUfactorization. LUdecomposition isnotunique (the combinations ofLandUfor a prescribedAare endless),unless certainconstraintsareplacedonLorU.These constraintsdistinguish one type ofdecompositionfrom another.Three commonly used decompositionsare listed inTable2.2.
Name Constraints
Doolittle’sdecomposition Lii=1, i=1,2, . . . ,n
Crout’sdecomposition Uii=1, i =1,2, . . . ,n
Choleski’sdecomposition L=UT
Table 2.2
After decomposingA,itis easyto solve the equationsAx=b,aspointedoutin Art. 2.1. Wefirstrewrite the equationsasLUx=b.Upon usingthenotationUx=y, the equationsbecome
43 2.3 LU Decomposition Methods
which can be solvedforybyforwardsubstitution.Then
Ux=y
willyieldxbytheback substitution process.
Theadvantage ofLUdecompositionoverthe Gauss elimination method is that onceAisdecomposed,we cansolveAx=bfor asmanyconstantvectorsbaswe
please.The cost of eachadditional solution isrelativelysmall, since the forward and back substitutionoperationsaremuch less time consumingthanthedecomposition process.
Doolittle’s Decomposition Method
Decomposition phase Doolittle’sdecomposition is closely relatedto Gauss elim
-ination.Inordertoillustrate therelationship, consider a 3×3 matrixAand assume that there exist triangular matrices
L=
⎡
⎢ ⎣
1 0 0
L21 1 0
L31 L32 1 ⎤
⎥
⎦ U=
⎡
⎢ ⎣
U11 U12 U13
0 U22 U23
0 0 U33 ⎤
⎥ ⎦
such thatA=LU. Aftercompletingthemultiplicationontheright handside,weget
A=
⎡
⎢ ⎣
U11 U12 U13
U11L21 U12L21+U22 U13L21+U23
U11L31 U12L31+U22L32 U13L31+U23L32+U33 ⎤
⎥
⎦ (2.12)
Letusnow applyGauss eliminationtoEq.(2.12).Thefirstpass of the elimina -tion procedure consists of choosingthefirstrow as thepivotrow and applyingthe elementaryoperations
row 2←row 2−L21×row 1(eliminates A21)
row 3←row 3−L31×row 1(eliminates A31)
Theresultis
A′=
⎡
⎢ ⎣
U11 U12 U13
0 U22 U23
0 U22L32 U23L32+U33 ⎤
⎥ ⎦
Inthenextpasswe take the second row as thepivotrow,and utilize the operation
44 Systems of Linear Algebraic Equations
ending up with
A′′=U=
⎡
⎢ ⎣
U11 U12 U13
0 U22 U23
0 0 U33 ⎤
⎥ ⎦
The foregoing illustration reveals twoimportant features ofDoolittle’sdecomp o-sition:
r ThematrixUisidentical to theuppertriangular matrixthatresults fromGauss
elimination.
r The off-diagonal elements ofLare thepivot equation multipliersused during
Gauss elimination;thatis,Lijis themultiplierthat eliminatedAij.
Itisusualpractice to store themultipliersinthe lowertriangular portionof the coefficientmatrix,replacingthe coefficientsas they are eliminated(LijreplacingAij).
Thediagonal elements ofLdonot have tobe stored, sinceitisunderstoodthat each of them isunity.Thefinal formof the coefficientmatrix wouldthusbe the following mixture ofLandU:
[L\U]=
⎡
⎢ ⎣
U11 U12 U13
L21 U22 U23
L31 L32 U33 ⎤
⎥
⎦ (2.13)
Thealgorithmfor Doolittle’sdecomposition is thusidentical to the Gauss elim
-ination procedureingauss, except that eachmultiplierλisnowstored inthe lower
triangular portionofA.
LUdec
InthisversionofLUdecompositionthe originalAisdestroyed and replaced by its
decomposedform[L\U].
function A = LUdec(A)
% LU decomposition of matrix A; returns A = [L\U].
% USAGE: A = LUdec(A)
n = size(A,1);
for k = 1:n-1
for i = k+1:n
if A(i,k) ˜= 0.0
lambda = A(i,k)/A(k,k);
45 2.3 LU Decomposition Methods A(i,k) = lambda;
end
end
end
Solution phase Consider nowtheprocedure forsolvingLy=bbyforwardsubsti -tution.The scalarformof the equationsis (recall thatLii=1)
y1=b1
L21y1+y2=b2
.. .
Lk1y1+Lk2y2+ · · · +Lk,k−1yk−1+yk=bk .. .
Solvingthekth equationforykyields
yk=bk− k−1
j=1
Lkjyj, k=2,3, . . . ,n (2.14)
Lettingyoverwriteb,we obtainthe forwardsubstitution algorithm:
for k = 2:n
y(k)= b(k) - A(k,1:k-1)*y(1:k-1);
end
Theback substitution phase forsolvingUx=y isidentical to thatused inthe Gauss elimination method.
LUsol
This functioncarries out the solution phase (forward and back substitutions).Itis
assumedthat the original coefficientmatrixhasbeen decomposed, so that theinput
isA=[L\U].The contents ofbarereplaced byyduringforwardsubstitution. Similarly,
back substitutionoverwritesywith the solutionx.
function x = LUsol(A,b)
% Solves L*U*b = x, where A contains both L and U;
% that is, A has the form [L\U].
47 2.3 LU Decomposition Methods
onlyloweror uppertriangularelements have tobe considered)inthe six unknown
components ofL. Bysolvingthese equationsin acertainorder,itispossible to have onlyoneunknown ineach equation.
Considerthe lowertriangular portionof eachmatrix in Eq.(2.16) (the upper
triangular portion would doaswell). Byequatingthe elementsinthefirst column, starting with thefirstrow and proceeding downward,we cancomputeL11,L21,and
L31inthat order:
A11=L211 L11=
A11
A21=L11L21 L21= A21/L11
A31=L11L31 L31= A31/L11
The secondcolumn, starting with second row,yieldsL22andL32:
A22=L221+L222 L22=
A22−L221
A32=L21L31+L22L32 L32=(A32−L21L31)/L22
Finallythe thirdcolumn, third row givesusL33:
A33=L231+L232+L233 L33=
A33−L231−L232
We can nowextrapolate theresults for ann×nmatrix. We observe thatatypical elementinthe lowertriangular portionofLLTis of the form
(LLT)ij =Li1Lj1+Li2Lj2+ · · · +LijLj j = j
k=1
LikLjk, i≥ j
Equatingthis termto the correspondingelement ofAyields
Aij = j
k=1
LikLjk, i= j,j+1, . . . ,n, j =1,2, . . . ,n (2.17)
Therange ofindices shownlimits the elements to the lowertriangular part. Forthe
first column(j =1),we obtainfrom Eq.(2.17)
L11=
A11 Li1= Ai1/L11, i=2,3, . . . ,n (2.18)
Proceedingto othercolumns,we observe that theunknown in Eq.(2.17)isLij (the
otherelements ofLappearing inthe equationhavealready beencomputed).Taking
the termcontainingLijoutside the summation in Eq.(2.17),we obtain
Aij= j−1
k=1