ANALISIS KONDISI GINJAL PASIEN MENGGUNAKAN METODE JARINGAN SYARAF TIRUAN *)
R. Muhammad Subekti**) , Balza Achmad***), Gogot Suyitno****)
ANALISIS KONDISI GINJAL PASIEN MENGGUNAKAN METODE JARINGAN SYARAF TIRUAN. Penelitian kemampuan jaringan syaraf tiruan dalam menganalisis dan memprediksi kondisi ginjal pasien telah dilakukan dengan baik. Spektrum kondisi ginjal pasien merupakan hasil analisis dokter menggunakan alat renograf dual probe BI-756. Jaringan syaraf tiruan memiliki kemampuan untuk menganalisis pola yang spesifik maupun yang tidak spesifik. Hal ini sangat bermanfaat bagi pengembangan perangkat lunak untuk analisi ginjal. Tujuan penelitian adalah mengembangkan sistem jaringan syaraf tiruan yang dapat menganalisis kondisi ginjal pasien dengan tepat. Hasil tingkat optimal jaringan syaraf tiruan adalah system yang memiliki satu lapisan tersembunyi dengan jumlah neuron minimal 17 neuron. Dalam mencapai kondisi konvergen, semakin besar jumlah neuron jumlah iterasi cenderung semakin sedikit, tapi waktu proses semakin lama. Laju belajar optimal adalah 1,000, mometum optimalnya 0,000 dimana ralat sistem yang digunakan adalah 0,001. Sistem jaringan syaraf tiruan telah diujikan terhadap data pasien yang sesungguhnya dan kemampuan identifikasi 98 % diperoleh dari 618 data uji. Hasil ini menunjukkan bahwa system ini memiliki kemampuan baik dimana hanya dilatih dengan 6 data saja.
PATIENT’S KIDNEY CONDITION ANALYSING USING ARTIFICIAL NEURAL NETWORK METHOD. The research of artificial neural network to analyzing and predicting patient’s kidney condition has been done. The spectrum of patient’s kidney condition is result of doctor analysis using dual probe renograf (BI-756). The artificial neural network has capability for specific pattern analysis or unspecific pattern analysis. That is very important for the development of kidney analysis software. The objective of the research is to develop artificial neural network system that can analyze patient’s kidney condition exactly. The result of artificial neural network optimum level is systems that having a hidden layer with minimal neuron number are 17 neurons. The optimum learning rate is 1.000, the optimum momentum is 0.000 and system error that used is 0,001. The artificial neural network system has been tested to the real patient’s data and identification capability of 98% was obtained from 618 tested data. These results showed that the software has a good performance that trained by 6 data only.
*)
Diajukan untuk diterbitkan dalam Majalah Batan. **)
Staf P2TRR – BATAN, Serpong. ***)
Staf pengajar di Jurusan Teknik Nuklir, Fakultas Teknik, UGM, Yogyakarta. ****)
PENDAHULUAN
Kemampuan jaringan syaraf tiruan dalam suatu aplikasi kecerdasan buatan
sudah banyak diterapkan di berbagai bidang ilmu pengetahuan dan teknologi. Namun
dalam dunia kedokteran Indonesia, penerapan kecerdasan buatan sangat kurang sekali.
Oleh karena itu, studi kasus aplikasi jaringan syaraf tiruan di bidang kedokteran akan
memberikan jalan pembuka bagi penelitian jaringan syaraf tiruan untuk mengenali
pola-pola klinis. Penelitian jaringan syaraf tiruan mengambil suatu pola-pola klinis yang memiliki
kasus kompleks, yaitu spektrum ginjal pasien dimana spektrum ini dihasilkan oleh alat
kedokteran nuklir buatan BATAN bernama renograf dual probe (BI-756). Data
keluaran renograf dual probe (BI-756) adalah urutan angka hasil akuisis data
pencacahan yang membentuk spektrum sangat kompleks dan bersifat tidak spesifik,
sehingga analisis terhadap data tersebut cenderung memberikan penilaian subyektif
akibat penilaian visual spektrum renograf. Oleh karena itu, bantuan seorang dokter ahli
yang berpengalaman sangat dibutuhkan untuk memperoleh hasil analisa medis yang
benar. Sehingga keberadaan suatu aplikasi kecerdasan buatan dapat membantu seorang
dokter dalam memberikan keputusan klinis dimana perangkat ini memiliki pengetahuan
berbagai data kasus hasil analisis komprehensif dari para dokter ahli yang
berpengalaman..
Tujuan penelitian ini adalah menyediakan parameter-parameter optimal
perangkat lunak berbasis kecerdasan buatan yang telah dikembangkan supaya dapat
menganalisis kondisi ginjal pasien dengan tepat. Optimasi perangkat lunak berbasis
kecerdasan buatan dilakukan melalui penelitian mendalam terhadap struktur organisasi,
metode komputasi, dan kinerja parameter jaringan syaraf tiruan. Perangkat lunak
berbasis kecerdasan buatan yang dikembangkan menggunakan sistem jaringan syaraf
tiruan umpan maju dan perambatan ralat balik (backpropagation) dan metode optimasi
parameter adalah variasi parameter. Sistem ini mampu dilatih dengan menggunakan
data yang sudah diketahui hasilnya dan dapat mengklasifikasikan setiap pola yang telah
dilatihkan sesuai dengan hasil yang dikehendaki [1]. Jaringan syaraf buatan dilatih menggunakan beberapa konfigurasi data dan pengujian kemampuan identifikasinya
dilakukan pada setiap konfigurasi data pelatihan. Dengan demikian, dalam tahap akhir
pengembangan perangkat lunak ini, perlu sekali dilakukan penelitian dan pengujian
kecerdasan buatan untuk analisa ginjal pasien yang memiliki kemampuan identifikasi
maksimal.
Gambar 1. Ginjal normal [2] Gambar 2. Ginjal tidak normal [2]
DASAR TEORI
Masukan dan Keluaran Jaringan Syaraf Tiruan
Renogram seperti terlihat pada Gambar 1 adalah hasil rekaman renografi yang
menggambarkan keadaan fungsi ginjal pasien. Kurva renograf yang ditampilan oleh
perangkat komputer mampu memberikan informasi secara kuantitatif tentang kapasitas
ekskresi relatif untuk masing-masing ginjal [2]. Kondisi inilah yang dijadikan sebagai masukan jaringan syaraf tiruan. Deskripsi spektrum renograf terlihat pada Gambar 1
yang memperlihatkan kondisi ginjal normal dan Gambar 2 yang memperlihatkan bahwa
ginjal bagian kiri tidak normal karena ada gangguan sistem pengeluaran urine.
Keluaran perangkat lunak adalah hasil analisa terhadap gejala-gejala kondisi
ginjal normal maupun abnormal berdasarkan analisis grafik data fungsi ginjal pasien,
dimana kondisi ginjal yang tercatat pada data-data yang telah ada meliputi kondisi ginjal
normal, nephrectomy type, total obstruktive, partial obstruktive, parenchymal desease
dan renal artery stenosis. Analisa yang dihasilkan berupa hasil tunggal kondisi ginjal
pasien dan hasil gabungan lebih dari satu kondisi ginjal pasien seperti tersebut di atas.
Jadi, perangkat lunak ini mampu mengeluarkan hasil analisa ginjal normal saja atau
hasil analisa ginjal normal yang memiliki kecenderungan gejala partial obstruktive atau
Analisis Jaringan Syaraf Tiruan
Sistem jaringan syaraf tiruan merupakan suatu sistem yang memiliki
pengetahuan dalam menganalisa suatu masalah dan melakukan pekerjaan-pekerjaan
klasifikasi pola, pemodelan sistem dan memori asosiasi [1,3,4]. Klasifikasi pola digunakan untuk menganalisis pola-pola masukkan dengan cara mencari kemiripan pola-pola
masukan. Pemodelan sistem digunakan untuk pembuat simulasi sistem yang mampu
menghasilkan keluaran dari suatu pola masukan yang akan disimulasikan. Sedangkan
memori asosiasi digunakan untuk menganalisis pola masukan yang tidak lengkap,
misalnya pola masukan memiliki derau, terpotong-potong, rusak dan hanya bisa tampil
sebagian [1].
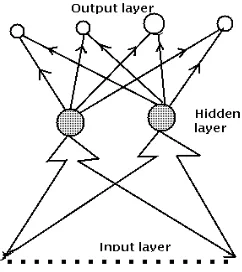
Gambar 3. Struktur jaringan syaraf tiruan umpan maju
Struktur jaringan syaraf tiruan umpan maju terlihat pada Gambar 5. Proses matematis
menggunakan persamaan sebagai berikut :
)
dengan : j = neuron pada lapisan tersembunyi ke-l
l = lapisan tersembunyi
Keluaran dari elemen proses di atas merupakan fungsi transfer yang umumnya
menggunakan fungsi sigmoid [1,5,6], persamaan umum sigmoid adalah sebagai berikut :
Proses yang terjadi untuk masing-masing lapisan tersembunyi adalah :
Untuk lapisan keluaran dimana l = L, maka :
)
Nilai ralat dari sistem ini merupakan hasil pengurangan keluaran sistem terhadap
keluaran yang kita inginkan [3,6]. Dengan demikian nilai ralat adalah sebagai berikut : ) dengan dj(n) adalah elemen keluaran yang kita inginkan.
Ralat ini adalah ralat untuk masing-masing parameter keluaran, sehingga dari
persamaan (6) diperoleh ralat total :
( )
Proses belajar sistem jaringan syaraf tiruan ini menggunakan pelatihan
perambatan ralat balik (backpropagation) seperti terlihat pada Gambar 8. Perhitungan
perambatan ralat balik dimulai dari ralat keluaran sistem yang diumpankan ke belakang
merambat sampai ke lapisan aktif terdepan. Perambatan ralat ke belakang ini berfungsi
sebagai parameter pembanding dalam proses perbaikan nilai bobot yang telah diperoleh.
Persamaan gradien lokal pada masing-masing lapisan jaringan dapat ditulis sebagai
berikut :
dimana j menunjukkan posisi neuron pada lapisan tersembunyi l. Untuk lapisan
keluaran dimana l = L, persamaan yang digunakan :
(
1 ( ))
dimana j adalah posisi neuron pada lapisan keluara L.
Dengan demikian, perbaikan bobot yang akan dilakukan oleh jaringan syaraf
tiruan tergantung pada hasil perhitungan gradien lokal yang melibatkan perambatan
Aliran proses generalisasi jaringan pada lapisan tersembunyi l adalah sebagai berikut : dimana : η = nilai laju belajar (learning-rate),
α = konstanta momentum (momentum constan).
Selanjutnya proses yang terjadi adalah proses iterasi dalam dengan syarat batas
adalah nilai ralat yang sudah ditentukan.
PEMBAHASAN NILAI OPTIMAL
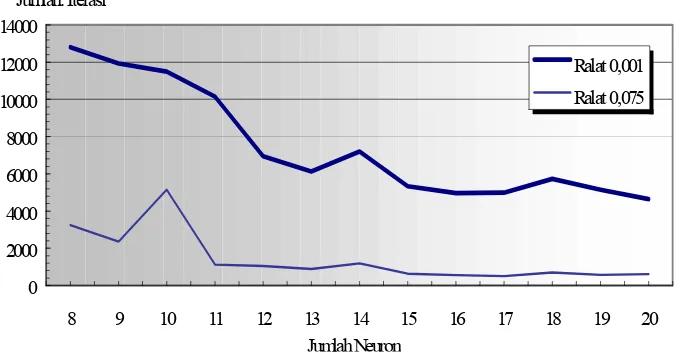
Pada Gambar 4, terlihat bahwa jumlah neuron optimal adalah lebih dari 10
neuron. Penentuan daerah optimal berdasarkan jumlah iterasi yang paling sedikit dan
jumlah neuron yang paling sedikit. Namun garis grafik yang curam di sebelah kiri perlu
diperhatikan dalam menentukan daerah optimal. Karena semakin dekat dengan daerah
curam, ruang ekspansi jaringan yang ditunjukkan oleh banyaknya neuron semakin
sedikit, meskipun kecepatan proses lebih baik dari pada menggunakan neuron yang
lebih banyak. Ruang ekspansi jaringan adalah parameter kemampuan jaringan dalam
menyerap materi belajar. Bila ruang ekspansi jaringan rendah, jaringan akan sulit sekali
mencapai konvergensi dalam proses pelatihan.
Gambar 4. Jumlah Iterasi terhadap Jumlah Neuron
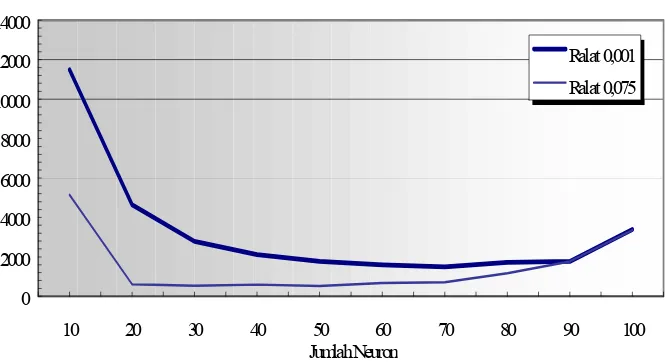
Gambar 5. Jumlah Iterasi terhadap Jumlah Neuron
Ruang ekspansi jaringan yang lebih diperlukan bila dilakukan pelatihan baru
dengan data yang lebih banyak. Semakin besar data tambahan untuk pelatihan baru,
semakin banyak ruang ekspansi jaringan yang harus disediakan. Tapi semakin besar
Ruang ekspansi jaringan, berarti semakin besar neuron yang harus disediakan dan ini
berakibat proses pelatihan akan berlangsung lebih lama meskipun jumlah iterasinya
relatif tidak banyak. Jumlah neuron yang cukup adalah optimal.
Pada Gambar 4, daerah optimal yang relatif aman adalah titik dengan jumlah
neuron lebih dari 17. Angka maksimal pada daerah optimal bersifat sangat relatif,
karena menyangkut kecepatan proses pelatihan dimana besar kecepatan tergantung pada
kecepatan sistem komputer secara keseluruhan. Sedangkan variasi parameter pelatihan
ditunjukkan dalam Tabel 1 dan Tabel 2
Tabel 1. Jumlah iterasi terhadap variasi momentum
Ralat
α
0,0750 0,0500 0,0250 0,0100 0,0075 0,0050 0,0025 0,0010
0,00 502 507 533 656 730 888 1388 2920
0,05 607 626 709 860 958 1173 1744 3629
0,10 602 642 750 973 1097 1311 2036 4140
0,20 645 654 672 867 985 1222 2015 4307
0 2000 4000 6000 8000 10000 12000 14000
10 20 30 40 50 60 70 80 90 100
Jumlah Neuron Jumlah. Iterasi
Ralat 0,001
Tabel 2. Jumlah iterasi terhadap variasi laju belajar
Ralat
η
0,0750 0,0500 0,0250 0,0100 0,0075 0,0050 0,0025 0,0010
1,00 502 507 533 656 730 888 1388 2920
0,95 620 625 663 804 877 1062 1598 3186
0,90 541 546 597 828 937 1177 1913 4033
0,80 549 554 594 851 997 1247 2030 4303
Tabel 3. Data-data pelatihan
Konfigurasi No Nama File Disket Bagian Vektor Keberhasilan (%)
Jumlah Kesalahan Identifikasi 1 Rn150.dat AR 01 RN Kiri 100000
2 Rn1.dat AR 09 RN Kanan 010000 3 Rn52.dat AR 10 RN Kanan 001000 4 Rn57.dat AR 10 RN Kanan 000100 I
5 Rn27.dat AR 10 RN Kanan 000010
94 35
1 Rn150.dat AR 01 RN Kiri 100000 2 Rn1.dat AR 09 RN Kanan 010000 3 Rn52.dat AR 10 RN Kanan 001000 4 Rn57.dat AR 10 RN Kanan 000100 5 Rn27.dat AR 10 RN Kanan 000010 II
6 Rn189.dat AR 03 RN Kanan 000100
98 10
1 Rn150.dat AR 01 RN Kiri 100000 2 Rn1.dat AR 09 RN Kanan 010000 3 Rn52.dat AR 10 RN Kanan 001000 4 Rn57.dat AR 10 RN Kanan 000100 5 Rn27.dat AR 10 RN Kanan 000010 6 Rn189.dat AR 03 RN Kanan 000100 III
7 Rn27.dat AR 10 RN Kiri 100000
98 12
Pada Tabel 3 terlihat bahwa kemampuan identifikasi 100% sulit diperoleh karena
spektrum grafik renogram untuk masing-masing kondisi memiliki kemiripan yang
tinggi dan bersifat tidak spesifik. Adapun nilai kemampuan identifikasi ini diperoleh
dari sistem yang telah mempelajari 6 data pelatihan saja. Penambahan 1 data pelatihan
mampu meningkatkan kemampuan identifikasinya menjadi 98%. Data pelatihan untuk
masing-masing konfigurasi ditunjukkan dalam Tabel 2. Penambahan 1 data pelatihan
menjadi 7 data pelatihan pada konfigurasi III akan menambah jumlah kesalahan
identifikasi meskipun tidak signifikan. Hal ini terjadi karena bobot yang sudah terbentuk
ginjal pasien tidak spesifik ditunjukkan dengan kemiripan spektrum ginjal yang sangat
tinggi, sehingga penambahan data pelatihan saat kemampuan identifikasinya mendekati
maksimal memiliki resiko penurunan kemampuan identifikasi. Perubahan bobot yang
bisa mengurangi kemampuan identifikasi ini bisa dihindari bila data yang ditambahkan
memiliki hasil keluaran yang spesifik terhadap suatu kondisi yang mewakili dan jumlah
kesalahan identifikasi terhadap data kondisi ginjal yang belum terwakili ini cukup
banyak.
KESIMPULAN
Konfigurasi sistem istem jaringan syaraf tiruan yang optimal dalam
mengidentifikasi grafik renogram adalah :
− Laju belajar = 1,00 − Momentum = 0,00 − Threshold = 0,10 − Lapisan tersembunyi = 1 − Jumlah neuron > 17
Persentase keberhasilan minimal sistem jaringan syaraf tiruan dalam
mengidentifikasi grafik renogram adalah 94%. Kemampuan identifikasi yang dimiliki
DAFTAR PUSTAKA
1. Haykin, S., Neural Networks, Macmillan College Publishing Company, New
York, 1994.
2. Prajitno, Petunjuk Perangkat Lunak dalam buku Petunjuk Renograf Model
BI-756, PPNY–BATAN, Yogyakarta, 1996.
3. Timothy, Advanced Algorithms for Neural Networks, John Wiley and Sons, Inc.
New York, 1995.
4. Harvey, R, Neural Network Principles, Prentice-Hall International, Inc, New
Jersey, 1994.
5. Kosko, B, Neural Networks and Fuzzy Systems, Prentice-Hall International, Inc.,
New Jersey, 1992
6. Timothy, Signal and Image Processing with Neural Networks, John Wiley and Sons,
Inc., New York, 1994.
7. Nelson, M. M., dan Illingworth, W. T, A Practical Guide to Neural Nets,
Addison-Wesley Publishing Company, Massachusetts, 1991.
8. Rubenking, N., Delphi Programming Problem Solver, IDG Books Worldwide, Inc.,
![Gambar 1. Ginjal normal [2]](https://thumb-ap.123doks.com/thumbv2/123dok/1607918.1552609/3.595.90.508.137.330/gambar-ginjal-normal.webp)