Sistem Pengaturan Waktu Riil
Algoritma Pengatur Digital
Ir. Jos Pramudijanto, M.Eng.
Jurusan Teknik Elektro FTI ITS
Telp. 5947302 Fax.5931237
Email: [email protected]
Objektif:
Metode Disain
Penalaan Parameter Kontroler
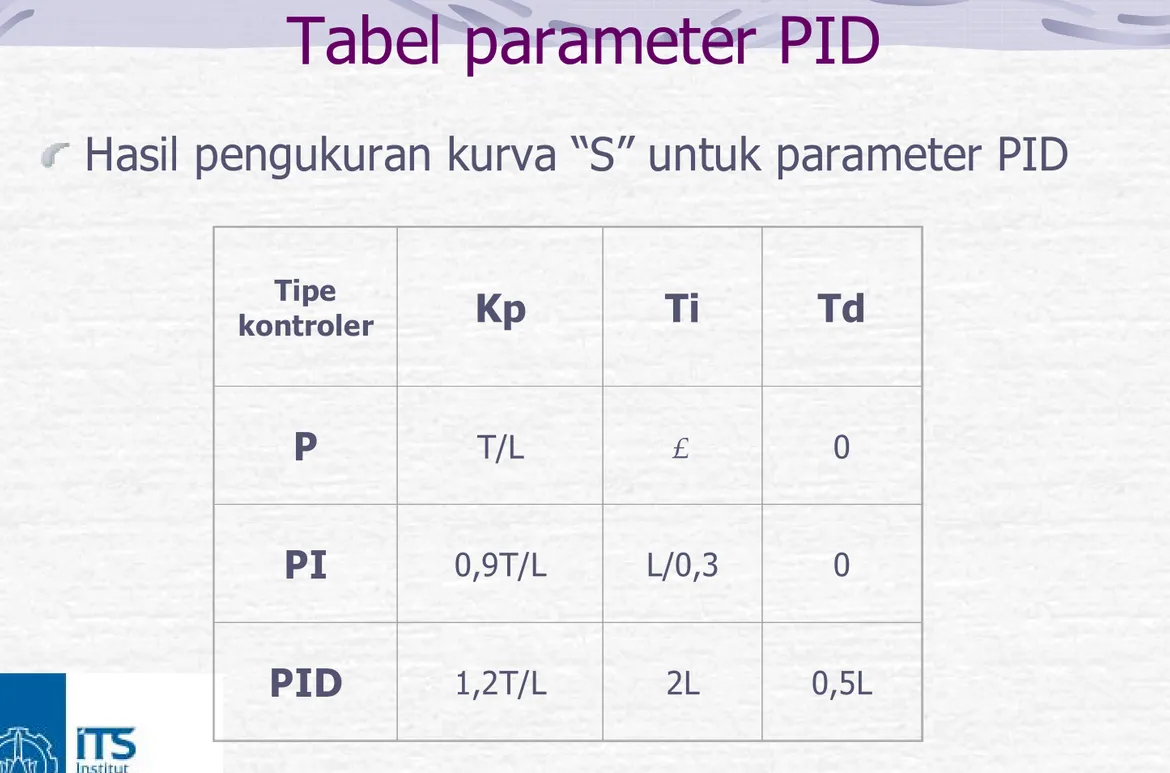
Ziegler-Nichols
Cohen Coon
Definisi :
suatu metode/cara pengendalian sistem pengaturan yang
direalisasikan kedalam suatu pengolah digital.
Realisasinya berupa bahasa pemrograman komputer.
Sensor
Aktuator
Conditioning Interface
Input
Interface Conditioning
![Tabel Strejc [Strejc V., 1960]](https://thumb-ap.123doks.com/thumbv2/123dok/4553581.3309550/13.1263.57.1225.50.793/tabel-strejc-strejc-v.webp)