SISTEM PENDETEKSI JUMLAH MOBIL DALAM
INTELLIGENT TRANSPORT SYSTEM (ITS)
MENGGUNAKAN METODE VIOLA-JONES
Diajukan untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana TeknikIRMAYA CITRA HARWENDHANI
E1E1 11 066
JURUSAN TEKNIK INFORMATIKA
FAKULTAS TEKNIK
UNIVERSITAS HALU OLEO
KENDARI
瑠 囲 咽 賢 凛
FSys t t ν
⑮M
EN
G
G
VAKAN
M
ETO
D
E燿
協‐」
O
N
ES
Adal ah benar di buat ol oh s aya s el l dL直 dan bel ur n per r l ab di buat dan di s c r ahkan s ebel umnya bai k s e暉 鑢at aupun s el ur bya, bai k ol eh s aya a機叩m or ang l at bai k di Uni ver s i t as Hal u 01oo at aupun i ns t i t us i pendi di kan l ai mya。
Kendar i , Apr i l
淋
2016 I r ma/ ya Ci t r a■ ar wendhaniN
I M
. El El H
066
PembimbingII
N
I P: 198301162010122002
Kendar i : Apr i 1 2016 PembirnbingI
DR. I Fo Muh. I hs an Sar i t a, M: KOMN
I P: 196502091989021001
k Ul l i ver s i t as I I I al u Ol eo198301162010122002
鋼L響ⅥWりRr Sr 飼 囲
r t r r t t M
EN
G
G
U
N
AKAN
M
ETO
D
E
И κI ∠‐」O
N
ES
Tdah dt t i dan盛
" 由
麟 法 触 dhadapan s i dang penguJ i J ums al l Tekni k mmat i ka Fakul t as Tc kni k Uni ver s i t as Hal u 01oo dan di nyat akan mel nc nuhi s yar at guna mempeЮl eh gel ar St t ana Tekni k.
Kendari,
April2016Ti m penguJ l l
l , Dr . ■ Muh. I hs an Sar i t M. KOM
Pembi Fl l l bi ng l
2. I ka PuⅣvant i Ni ngr um, S. Kom, M. Cs Pembi mbi ng Ⅱ
3. Ⅳl uh. Yami n, ST。, l И. Eng Pc ngt t i I ( Kc t ua Si dang) 4. Nat al i s Rans i , S. Si . , M. Cs Pc ngt t i I I ( SCt t et a」 s Si dang) 5。 NI I ut hmai nnah Muc ht ar , ST. , Ⅳ f . KOⅣI Pc nguj l I I I TandaTangan: 1, Mengesahkan,
β
胤凱 蠍
F
11餞
Pur w
ant i N
i ngr um
, S. Kom
, M
. Cs
N
i p. 198301162010122002
ⅣI us t ar umⅣI us ar uddi n, ST, DI I T, Ph. D
N
i p. 1973012220011201002
yang pernah diajukan untuk memperoleh gelar keserjanaan di suatu perguruan tinggi dan sejauh yang penulis ketahui bahwa tidak terdapat karya atau pendapat yang
pernah ditulis atau diterbitkan oleh orang lain, kecuali yang secara tertulis diacu dalam naskah ini dan disebut dalam daftar pustaka.
Kendari,
April20l6
Penulis
Irmaya C itra Harwendhani
v
SISTEM PENDETEKSI JUMLAH MOBIL DALAM INTELLIGENT TRANSPORT SYSTEM (ITS) MENGGUNAKAN METODE VIOLA – JONES
Kata Kunci : ITS, Deteksi Mobil, Metode Viola-Jones
Salah satu cara untuk mengatasi kepadatan lalu lintas adalah memanfaatkan teknologi Intelligent Transport System (ITS). ITS adalah sistem yang diterapkan untuk mengendalikan dan mengelola lalu lintas kendaraan, distribusi kendaraan dan infrastruktur untuk mencapai sistem transportasi yang lebih aman dan teratur. Perguliran waktu traffic light dalam ITS sifatnya fleksibel karena disesuaikan dengan jumlah kendaraan di lalu lintas. Untuk mendapatkan waktu perguliran traffic light yang efisien bergantung pada keakuratan perhitungan jumlah kendaraan.
Pada penelitian ini metode yang digunakan adalah metode viola-jones. Sistem pendeteksi jumlah mobil ini diimplementasikan menggunakan bahasa pemrograman Java berbasis desktop.
Hasil yang didapatkan dari sistem ini menunjukkan tingkat keakuratan tertinggi metode Viola-Jones dalam mendeteksi jumlah mobil terdapat pada kondisi sampel 1 buah mobil yakni sebesar 92,86%. Sedangkan keakuratan terendah metode Viola-Jones dalam menentukan jumlah mobil terdapat pada kondisi sampel acak yakni sebesar 52,78%.
vi
Detection System The Number Of Cars In The Intelligent Transport System (ITS) Using Methods Viola-Jones
Keywords: ITS, Car Detection, Methods Viola-Jones
One way to cope with the traffic density is leveraging technology Intelligent Transport System (ITS). ITS is a system implemented to control and manage the traffic of vehicles, vehicle distribution and transport system infrastructure to achieve a more secure and organized. Revolving a traffic light in the ITS is flexible because it depends on the number of vehicles in traffic. To obtain the revolving time efficient traffic light depends on the accuracy of the calculation of the number of vehicles.
In this study, the method used is the method of viola-Jones. The number of car detection system is implemented using the Java programming language-based desktop.
Results obtained from these systems demonstrate the highest degree of accuracy viola-Jones method in detecting the number of cars on the condition of the samples contained 1 cars which amounted to 92,86%. While the highest error jones viola method in determining the number of cars found on a random sample conditions which amounted to 52,78%.
vii
Assalamualaikum Wr. Wb.
Segala puji dan syukur penulis panjatkan kehadirat Allah SWT, karena atas berkat rahmat dan ridho-Nya tugas akhir dengan judul “Sistem Pendeteksi Jumlah Mobil dalam Intelligent Transport System menggunakan Metode Viola-Jones . ini dapat disusun dan diselesaikan. Selama menempuh pendidikan dan penulisan serta penyelesaian tugas akhir ini penulis banyak memperoleh dukungan baik secara moril maupun materil dari berbagai pihak.
Pada kesempatan ini dengan segala kerendahan hati penulis haturkan sebuah ucapan terima kasih yang sebesar-besarnya dan penghargaan yang setinggi-tingginya kepada yang terhormat :
1. Buat kedua orang tuaku tercinta yang medukung dan memberikan dorongan untuk menyelesaikan tugas akhir ini dengan baik. Ayah (Drs. La Iwe, M.Si) dan Ibu (Tutik Harmini, S.Pd., M.Pd). Terimakasih atas doa, cinta dan semua motivasi yang telah diberikan.
2. Bapak Dr. Ir. Muh. Ihsan Sarita, M.KOM selaku dosen pembimbing I yang sangat banyak memberikan motivasi, masukan dan saran serta ketersediaan untuk meluangkan waktunya dengan penulis untuk memberikan arahan – arahan yang sangat berguna pada saat seminar proposal hingga seminar hasil tugas akhir. 3. Ibu Ika Purwanti Ningrum, S.KOM., M.Cs selaku dosen
pembimbing II yang di dalam berbagai kesibukan dapat menyempatkan diri membimbing dan mengarahkan serta memberi petunjuk dan saran yang sangat berharga bagi penulisan tugas akhir ini.
4. Seluruh Dosen Jurusan Teknik Informatika Universitas Halu Oleo yang telah memberikan bimbingan arahan dan saran selama penulian
viii
semangatnya selama pengerjaan tugas akhir ini.
6. Saudara-saudaraku tercinta (Wedhya Puspita Loka, Bimo Brahman Tio, Juliana dan Murniyati) terimakasih atas motivasi yang sangat membangun.
7. Yang teristimewa (Kamari, S.Pt) yang tidak pernah letih mendengarkan baperan ku. Terima kasih atas waktu, cinta, canda dan tawa.
Dengan keterbatasan pengalaman, pengetahuan maupun pustaka yang ditinjau, penulis menyadari bahwa tugas akhir ini masih banyak kekurangan dan perlu pengembangan lebih lanjut agar benar-benar bermanfaat. Oleh sebab itu, penulis sangat mengharapkan kritik dan saran agar tugas akhir ini lebih sempurna serta sebagai masukan bagi penulis untuk penelitian dan penulisan karya ilmiah di masa yang akan datang. Akhir kata, penulis berharap tugas akhir ini memberikan manfaat bagi kita semua terutama untuk pengembangan ilmu pengetahuan yang ramah lingkungan dan bersifat positif.
Kendari, April 2016 Penulis
ix HALAMAN JUDUL ... i HALAMAN PENGESAHAN ... ii HALAMAN PERNYATAAN ... iv INTISARI ... v ABSTRACT ... vi
KATA PENGANTAR ... vii
DAFTAR ISI ... ix
DAFTAR GAMBAR ... xi
DAFTAR TABEL ... xii
BAB I PENDAHULUAN 1.1.Latar Belakang ... 1 1.2.Rumusan Masalah ... 2 1.3.Batasan Masalah ... 3 1.4.Tujuan Penelitian ... 3 1.5.Manfaat Penelitian ... 3 1.6.Sistematika Penulisan ... 3 1.7.Tinjauan Pustaka ... 4
BAB II LANDASAN TEORI 2.1. ITS (Intelligent Transport System) ... 6
2.2. Citra ... 9
2.3. Metode viola-jones ... 13
2.4. Pemrograman Java ... 20
2.5. IDE NetBeans ... 21
2.6. OpenCV ... 22
2.7. Metode Pengembangan Sistem ... 22
2.8. Flowchart Diagram ... 26
BAB III METODOLOGI PENELITIAN 3.1. Tempat dan Waktu Penelitian ... 30
3.2. Data yang digunakan ... 30
3.3. Metodologi pengumpulan data ... 31
3.4. Prosedur pengembangan perangkat lunak ... 31 BAB IV ANALISIS DAN PERANCANGAN SISTEM
x
BAB V IMPLEMENTASI DAN PENGUJIAN SISTEM
5.1. Kebutuhan sistem ... 45
5.2. Implementasi Interface sistem ... 45
5.3. Analisis dan pembahasan ... 48
5.4. Perbandingan kondisi sampel dengan hasil pengamatan ... 69
BAB VI PENUTUP 6.1. Kesimpulan ... 71
6.2. Saran ... 71 DAFTAR PUSTAKA
xi
Gambar 2.1 Ruang lingkup pemanfaatan ITS ... 6
Gambar 2.2 Citra fungsi dua Variabel ... 10
Gambar 2.3 Haar-like features ... 15
Gambar 2.4 Perhitungan nilai pixel region dengan integral gambar... 16
Gambar 2.5 Contoh citra integral ... 17
Gambar 2.6 Jumlah dari seluruh pixel yang ada pada setiap persegi panjang 17
Gambar 2.7 Metode cascade of classifier ... 19
Gambar 4.1 Flowchart metode Viola-Jones ... 34
Gambar 4.2 Contoh konversi citra RGB ke citra Grayscale ... 35
Gambar 4.3 Sampel perhitungan integral image ... 36
Gambar 4.4 Citra masukan ... 36
Gambar 4.5 Persegi haar like pada citra masukan ... 37
Gambar 4.6 Matriks integral image dari citra masukan ... 37
Gambar 4.7 Diagram use case ... 41
Gambar 4.8 Diagram activity ... 41
Gambar 4.9 Sequence diagram ... 42
Gambar 4.10 Interface sistem ... 43
Gambar 5.1 Tampilan aplikasi ... 46
Gambar 5.2 Tampilan input citra ... 46
Gambar 5.3 Tampilan proses deteksi mobil ... 47
xii
Tabel 2.1. simbol use Case diagram ... 23
Tabel 2.2. simbol activity diagram ... 25
Tabel 2.3. simbol sequence diagram ... 26
Tabel 2.4. simbol conecting ... 27
Tabel 2.5. simbol processing ... 27
Tabel 2.6. simbol input-output ... 28
Tabel 3.1. Tabel waktu penelitian ... 30
Tabel 5.1. Hasil perhitungan mobil uji 45° ... 48
Tabel 5.2. Hasil perhitungan mobil uji 1 mobil ... 52
Tabel 5.3. Hasil perhitungan mobil uji 2 mobil ... 57
Tabel 5.4. Hasil perhitungan mobil uji ≥ 3 mobil ... 61
Tabel 5.5. Hasil perhitungan mobil secara acak ... 65
1 1.1 Latar Belakang
Daerah perkotaan pada umumnya mengalami perkembangan pesat dari semua bidang, salah satu bidang adalah sarana transportasi. Kenyataannya di perkotaan terjadi ketidakseimbangan antara tingkat pertumbuhan jalan di satu sisi dengan tingkat pertumbuhan kendaraan di sisi lain, dimana pertumbuhan jalan jauh lebih kecil dari pada tingkat pertumbuhan kendaraan. Jumlah kendaraan di Indonesia saat ini kian bertambah salah satunya di daerah Sulawesi Tenggara khususnya kota Kendari. Dengan kondisi seperti itu maka permasalahan seperti kemacetan, kecelakaan, pelanggaran lalu lintas dan kecenderungan timbulnya kejahatan juga ikut meningkat.
Berdasarkan kejadian tersebut, dengan adanya sistem pengawasan lalu lintas yang memberikan informasi secara cepat kepada masyarakat pengguna jalan mengenai daerah-daerah yang rawan kemacetan diharapkan dapat memberikan informasi awal, ketika melakukan perjalanan, kondisi ini sangat penting dalam meningkatkan kinerja manajemen lalu lintas seperti kepadatan lalu lintas.
Penempatan traffic light pada titik-titik tertentu di persimpangan jalan diharapkan dapat mengendalikan lalu lintas dan mengurangi permasalahan yang terjadi. Sistem traffic light yang digunakan saat ini ada dua jenis. Yang pertama adalah sistem pengontrol lampu lalu lintas konvensional yang pertukaran warna lampunya ditukar setiap waktu konstan. Kedua adalah sistem pengontrol dengan sensor kedekatan kendaraan, sistem ini menggunakan sensor yang hanya menentukan keberadaan mobil di sebuah persimpangan dan menyediakan teknik pergantian lampu lalu lintas yang lebih baik dari cara konvensional. Kedua sistem traffic light tersebut kini dianggap tidak efisien karena keduanya tidak mampu menyeimbangkan antara waktu yang dibutuhkan oleh jalur lalu lintas untuk melewatkan sejumlah kendaraan dalam antrian lalu lintas (Yosep dan Indrabulan, 2014).
Salah satu cara untuk mengefisienkan fungsi dari traffic light dan menyelesaikan permasalahan yang terjadi di lalu lintas adalah dengan memanfaatkan teknologi Intelligent Transport Sistem (ITS). ITS adalah penerapan teknologi informasi dan komunikasi dalam infrastruktur transportasi dan kendaraan sebagai alternatif solusi untuk masalah kepadatan yang semakin tinggi di kota-kota besar. Sistem ini diterapkan untuk mengendalikan dan mengelola lalu lintas kendaraan, distribusi kendaraan dan infrastruktur untuk mencapai sistem transportasi yang lebih aman, lebih teratur dan perbaikan efisiensi sistem transit dan infrastruktur lalu lintas. Perguliran waktu traffic light dalam ITS sifatnya fleksibel karena disesuaikan dengan jumlah kendaraan di jalan. Untuk mendapatkan keefisienan waktu perguliran traffic light bergantung pada keakuratan perhitungan jumlah kendaraan.
Salah satu metode yang dapat digunakan untuk menghitung jumlah kendaraan yaitu metode Viola-Jones (Mulyawati dan bahar, 2014). Algoritma Viola-Jones merupakan algoritma yang paling banyak digunakan untuk mendeteksi objek. Proses pendeteksian objek dilakukan dengan mengklasifikasikan sebuah gambar. Pendekatan metode Viola-Jones untuk mendeteksi objek dalam gambar menggunakan fitur haar yang hanya bergantung pada jumlah pixel dalam persegi maka kelebihannya yaitu komputasinya sangat cepat (Bharata teguh, 2012). Berdasarkan hal tersebut dan dengan melihat pentingnya keakuratan perhitungan jumlah kendaraan dalam menentukan keefisienan waktu gulir traffic light maka penulis mengangkat judul “SISTEM PENDETEKSI JUMLAH MOBIL DALAM INTELLIGENT TRANSPORT SISTEM (ITS) MENGGUNAKAN METODE VIOLA-JONES”.
1.2 Rumusan Masalah
Berdasarkan latar belakang di atas, rumusan masalah penelitian ini adalah seberapa besar tingkat keakuratan metode viola-jones dalam mendeteksi jumlah mobil.
1.3 Batasan Masalah
Adapun batasan masalah dari penelitian ini antara lain :
1. Pengambilan data jalur lalu lintas dilakukan pada waktu siang hari dengan pola acak dan tidak mempertimbangkan kondisi kepadatan. 2. Hasil dari pengukuran adalah berupa jumlah mobil dalam bilangan bulat
tanpa mengklasifikasi jenis mobil.
3. Data sample yang diambil berupa gambar berformat .jpg atau .png 1.4 Tujuan
Berdasarkan permasalahan yang telah dirumuskan sebelumnya maka tujuan dari penelitian ini adalah untuk mengetahui tingkat keakuratan metode Viola-Jones dalam mendeteksi jumlah mobil.
1.5 Manfaat
Manfaat yang dapat diperoleh dari penelitian ini adalah :
1. Dapat digunakan pada kamera pengawas untuk mengetahui kepadatan lalu lintas.
2. Dalam pengembangannya, hasil pendeteksian mobil dapat diimplementasikan dalam menanggulangi kemacetan lalu lintas.
1.6 Sistematika Penulisan
Penulisan Tugas Akhir ini akan mengikuti sistematika sebagai berikut : BAB I PENDAHULUAN
Bab ini menguraikan secara umum mengenai hal yang menyangkut latar belakang, perumusan masalah dan ruang lingkup, tujuan, metodologi, dan sistematika penulisan tugas akhir.
BAB II LANDASAN TEORI
Bab ini berisi teori-teori tentang hal-hal yang berhubungan dengan Intelligent Transport Sistem, Citra, Java, openCV. IDE NetBeans, metode Viola-Jones, dan UML diagram.
BAB III METODE PENELITIAN
Bab ini membahas tentang analisis kebutuhan sistem dan tahap-tahap dalam perancangan sistem yang meliputi perancangan proses dan perancangan antarmuka.
BAB IVANALISIS DAN PERANCANGAN
Pada bagian ini diuraikan analisis sistem yang akan dibuat dan kebutuhan sistem yang meliputi kebutuhan sistem. Rancangan sistem meliputi rancangan arsitektur sistem, rancangan proses dan rancangan antarmuka pengguna. BAB V IMPLEMENTASI DAN PEMBAHASAN
Bagian ini menyajikan implementasi serta hasil penelitian dan pembahasan. Bagian implementasi menguraikan tentang implementasi secara detail dan runut, bagian hasil penelitian dan pembahasan hasil dari implementasi disertai dengan penjelasan yang terkait.
BAB V PENUTUP
Bab ini berisi tentang kesimpulan dan saran yang dikumpulkan dari hasil yang telah diperoleh.
1.7 Tinjauan Pustaka
Adapun beberapa penelitian yang berhubungan dengan penelitian ini adalah sebagai berikut :
1. Salah satu penelitian tentang pendeteksi objek dengan menggunakan konsep yang sama dilakukan oleh RD. Kusumanto (2012). Penelitian tersebut diterapkan pada deteksi wajah dengan hasil citra statis error sebesar 28% terjadi pada saat gambar berisi 7 orang dengan jumlah wajah terdeteksi sebanyak 9 wajah.
2. Dedi Ary Prasetya (2012) dalam studi Deteksi Wajah Metode Viola-Jones pada OpenCV Menggunakan Pemrograman Phyton. Dalam kesimpulannya, sistem dapat mendeteksi adanya beberapa (lebih dari satu) wajah dalam suatu citra. Sistem juga dapat mendeteksi objek yang menyerupai wajah ketika objek tersebut memilki kontur yang sama dengan
kontur wajah manusia (kontur wajah pada template), misalnya, wajah boneka dan topeng Hulk.
3. Marson James Budiman (2012) dalam studi Sistem Monitoring Dan Kontrol Lalu lintas Perkotaan. Penelitian ini bertujuan (1) merancang sistem monitoring dan kontrol lalu lintas, (2) mengintegrasikan informasi kepadatan lalu lintas dan kerusakan traffic light melalui peta lokasi jalan yang ditampilkan pada sisi pengguna, dan (3) mengidentifikasikan Jalur-jalur terjadi kemacetan lalu lintas. Hasil perancangan ini berupa titik koordinat peta lokasi jalan mengenai kepadatan dan kerusakan traffic light. Sistem memberikan output tampilan pada sisi pengguna dimana terdapat titik-titik kemacetan dan kerusakan traffic light pada berbagai persimpangan. Hasil penelitian ini diharapkan sebagai panduan pengguna jalan dalam memilih jalur alternatif ketika terjadi kemacetan lalu lintas, dan mengambil keputusan jalur perjalanan dengan cepat,sehingga tingkat kemacetan dapat di kurangi.
4. Teguh Bharata (2012) dalam studi Sistem Deteksi Wajah dengan
Menggunakan Metode Viola-Jones. Penelitian ini berisikan tentang suatu
sistem deteksi wajah pada manusia dengan menggunakan metode Viola-Jones. Metode Viola-Jones relatif mendapatkan hasil yang cepat, akurat, dan efisien dalam melakukan deteksi wajah pada gambar. Metode Viola-Jones merupakan algoritma yang paling banyak digunakan untuk mendeteksi wajah. Dalam penelitian ini ditampilkan gambar yang dideteksi sebagai objek wajah dan bukan wajah. Hasil penelitian ini mendapatkan nilai akurasi system deteksi wajah sebesar 90,9%. Hasil lain yang didapatkan oleh posisi lain yang didapatkan oleh posisi lain yang didapatkan adalah posisi wajah yang tegak/tidak tegak menentukan
6 2.1 ITS (Intelligent Transport Sistem)
Menghadapi kemajuan teknologi dalam transportasi terdapat pilihan, yaitu memperbaiki teknologi yang ada sekarang atau pembangunan teknologi baru. Pembangunan teknologi baru membutuhkan tersedianya dana yang sangat besar (Adisasmita, 2011). Karena traffic light saat ini dituntut untuk dapat menyelesaikan permasalahan perguliran waktu yang sesuai pada kebutuhan persimpangan jalan serta hal terkait selayaknya kemampuan nalar manusia maka solusi paling tepat yang ditawarkan yaitu penerapan artificial intelligence (AI) pada traffic light tersebut. (Suyanto, 2011) menyatakan bahwa AI berusaha membangun entitas-entitas cerdas yang sesuai dengan pemahaman manusia, dan entitas tersebut ternyata sangat menarik dan mempercepat proses pemahaman terhadap kecerdasan manusia. (R. Suyuti, 2012) menambahkan bahwa Teknologi ITS (Intelligent Transport Sistem) adalah salah satu cabang AI di bidang transportasi yang baru berkembang beberapa tahun terakhir untuk mengatasi kemacetan lalulintas di beberapa negara maju.
2.1.1 Ruang Lingkup ITS
Lingkup ITS dapat berbeda pada masing-masing negara tergantung kepada kebijakan yang dibuat. Menurut (S. Ezell,2010) Secara umum ITS mempunyai lingkup-lingkup sebagai berikut:
1. Advanced Traveller Information Sistem
Sistem ini secara prinsip adalah sistem informasi yang menjadi panduan kendaraan untuk mendapatkan route jalan yang optimal. Pada pengembangan selanjutnya sistem ini bahkan diharapkan mampu untuk membantu pengemudi mengontrol kendaraan agar sampai ditujuan dengan aman, nyaman dan lancar.
2. Advanced Traffic Management Sistem
Advanced Traffic Managent Sistem digunakan oleh pengelola jalan untuk memantau lalulintas dan memberikan informasi realtime kepada pengguna jalan. Tujuan sistem ini agar lalulintas dapat dioptimalkan pada seluruh route alternatif yang ada, sehingga kemacetan dapat dihindari atau dikurangi dengan memberikan saran kepada pemakai jalan. Sistem ini juga memberikan informasi adanya hambatan atau kecelakaan pada route yang akan ditempuh, sehingga pengemudi dapat memakai alternatif route lain.
3. Incident Management Sistem
Incident Management Sistem adalah sistem informasi yang digunakan untuk berbagai kejadian darurat, misalkan kecelakaan, longsor atau bencana lainnya. Berdasarkan hasil pemantauan sensor-sensor pada Traffic Management Sistem, pengelola jalan atau pihak yang berwenang dapat memperoleh informasi lebih awal. Informasi dapat berupa besarnya kecelakaan, fatalitas kecelakaan, jumlah ambulans yang diperlukan, tenaga medis yang harus dikirim, alat penolong yang harus didatangkan dan sebagainya.
4. Electronic Toll Collection Sistem
Persoalan klasik pada jalan tol adalah lama waktu yang diperlukan untuk transaksi pelanggan di gerbang tol. Electronic Toll Collection diterapkan untuk mempersingkat waktu transaksi di gerbang tol.
5. Assistance For Safe Driving
Assistance for Safe Driving adalah bentuk dari ITS yang sangat maju. Kendaraan dilengkapi dengan sejumlah sensor yang dapat mengarahkan pengemudi unuk berkendara dengan aman. Sensor tersebut dihubungkan dengan sebuah komputer yang terpasang pada kendaraan.
6. Support for Public Transportation
ITS jenis ini diterapkan pada moda transpotasi umum, misalnya: pesawat terbang, bus, kapal laut, ferri, monorail dan kereta api. Selain diterapkan pada wahana transportasi publik, sistem ini juga diterapkan pada prasarana transportasi publik seperti: stasiun kereta api, terminal bus, shelterbus, pelabuhan dan bandara.
Salah satu aplikasi dari teknologi ITS adalah Area Traffic Control Sistem (ATCS) (S. Ezell, 2010) yang digunakan sebagai sistem kendali lalulintas di persimpangan yang mengintegrasikan waktu siklus pada beberapa persimpangan di suatu wilayah perkotaan sehingga dapat menghasilkan delay yang minimum. Teknologi ATCS yang diterapkan pada lampu lalulintas dengan pengoperasian yang terdistribusi dianggap mampu menyelesaikan permasalahan penentuan waktu gulir lampu berdasarkan jumlah kendaraan dalam persimpangan. Sistem Pengaturan Lampu Lalulintas Terdistribusi adalah sebuah sistem pengaturan lampu lalulintas yang ditujukan untuk memenuhi kebutuhan akan kinerja pengaturan lampu lalulintas yang cerdas dan dapat bersifat adaptif terhadap kondisi lalulintas. Jenis traffic light yang dapat beroperasi dengan sistem terdistribusi tersebut dikenal sebagai AdaptiveTrafficLight (ATL) (D. Kurniawan dan Yuwaldi Away, 2006). Konsep dari ATL yaitu mendeteksi adanya kendaraan secara real time dan menghitung jumlah unit kendaraan dalam antrian pada suatu persimpangan, kemudian diintegrasikan dengan jumlah unit kendaraan di persimpangan lain sebagai variabel penentu agar diperoleh pembagian waktu gulir yang sesuai dengan kebutuhan tiap simpang.
2.2 Citra
2.2.1 Pengertian Citra
Citra adalah gambar dua dimensi hasil konversi dari gambar analog yang kontinu menjadi gambar diskrit melalui proses sampling dengan membagi gambar analog menjadi N baris dan M kolom sehingga menjadi gambar diskrit. Persilangan antara baris dan kolom tertentu disebut dengan pixel.
2.2.2 Jenis-Jenis Citra 1. Citra optik
Citra bersifat optik dapatanya disebut citra fotografik yang berbentuk foto. Citra bersifat optik ini secara teoritis merupakan citra kontinu (merekam data secara langsung dalam suatu bidang). Kontinu dalam pengertian nilai keabuan dinyatakan dengan presisi angka tak terhingga.
2. Citra analog
Analog berhubungan dengan hal yang kontinu dalam satu dimensi, contohnya adalah bunyi diwakili dalam bentuk analog, yaitu suatu getaran gelombang udara yang kontinu di mana kekuatannya diwakili sebagai jarak gelombang. Hampir semua kejadian alam boleh diwakili sebagai perwakilan analog seperti bunyi, cahaya, air, elektrik, angin dan sebagainya. Jadi citra analog adalah citra yang terdiri dari sinyal-sinyal frekuensi elektromagnetis yang belum dibedakan sehingga pada umumnya tidak dapat ditentukan ukurannya.
3. Citra digital
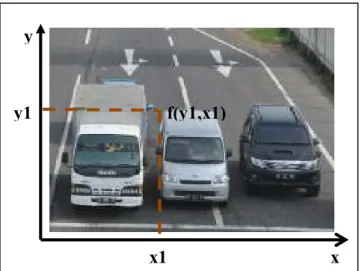
Citra digital adalah citra yang dinyatakan secara diskrit (tidak kontinu), baik untuk posisi koordinatnya maupun warnanya. Dengan demikian, citra digital dapat digambarkan sebagai suatu matriks, di mana indeks baris dan indeks kolom dari matriks menyatakan posisi suatu titik di dalam citra dan harga dari elemen matriks menyatakan warna citra pada titik tersebut. Dalam citra digital yang dinyatakan sebagai susunan matriks, elemen–elemen matriks tadi disebut juga dengan istilah pixel yang berasal dari kata pictureelement. Citra digital dapat didefinisikan sebagai fungsi dua variabel f(x,y) dengan x dan y adalah koordinat spasial
sedangkan nilai f(x,y) adalah intensitas citra pada koordinat tersebut, hal itu diilustrasikan pada Gambar 2.2 berikut:
Gambar 2.2. Citra fungsi dua variable
Citra digital tersusun atas titik-titik yang dapat berbentuk persegi panjang dan secara beraturan membentuk baris-baris dan kolom-kolom. Setiap titik memiliki koordinat dan dapat dinyatakan dalam bilangan bulat positif, yaitu 0 atau 1 bergantung pada sistem yang digunakan. Format nilai pixel sama dengan format citra keseluruhan. Pada kebanyakan sistem pencitraan, nilai ini dapat berupa bilangan bulat positif. Format citra digital yang banyak digunakan, yaitu:
1. Citra biner (Monokrom) Citra monokrom atau citra hitam-putih merupakan citra di mana f(x,y) merupakan fungsi tingkat keabuan dari hitam ke putih.
2. Citra skala keabuan (Grayscale). Citra grayscale dikatakan format citra skala keabuan karena pada umumnya warna yang dipakai adalah warna hitam sebagai warna minimum dan warna putih sebagai warna maksimumnya, sehingga warna antara keduanya adalah abu-abu.
3. Citra berwarna, dimana citra warna terdiri atas 3 layer matriks, yaitu R-layer, G-R-layer, B-layer. sistem warna RGB (Red Green Blue) menggunakan sistem tampilan grafik kualitas tinggi (High quality raster graphic) yaitu mode 24 bit. setiap komponen warna merah, hijau, biru
y
y1 f(y1,x1)
x
x1
masing-masing mendapatkan alokasi 8 bit untuk menampilkan warna. Pada sistem warna RGB, setiap pixel akan dinyatakan dalam 3 parameter dan bukan nomor warna. Setiap warna mempunyai range nilai 00 (angka desimalnya adalah 0) dan f (angka desimalnya 255) atau mempunyai nilai derajat keabuan 256 = 2 . Dengan demikian, range warna yang digunakan adalah (2 )(2 )(2 ) = 2 (atau dikenal dengan istilah True color pada Windows). Nilai warna yang digunakan merupakan gabungan warna cahaya merah, hijau dan biru.
2.2.3 Penyelarasan Citra
Pada proses pendeteksian objek, citra objek yang didapatkan masih berupa perkiraan kasar atau masih memiliki kualitas yang cukup buruk seperti ukuran yang berbeda dengan ukuran normal, faktor pencahayaan yang kurang atau lebih, kejelasan citra yang buruk dan sebagainya. Maka perlu diadakan proses penyelarasan. Proses penyelarasan wajah merupakan proses yang bertujuan untuk menormalisasi wajah dari citra objek yang didapatkan dari proses pendeteksian objek. Proses ini terdiri dari tahapan-tahapan sebagai berikut:
1. Grayscaling (tahap konversi warna menjadi warna abu)
Grayscaling citra merupakan tahapan pertama dari proses penyelarasan, pada tahap ini terjadi pengkonversian citra warna RGB menjadi citra berwarna abu. Citra warna RGB terdiri dari 3 parameter warna yaitu merah (red), hijau (green) dan biru (blue), jika citra warna RGB ini dimasukkan ke dalam proses ekstraksi, maka proses tersebut akan sulit untuk dilakukan karena citra RGB terdiri dari 3 parameter. Oleh karena itu diperlukan penyamaan parameter yaitu dengan melakukan tahap grayscaling ini. Berikut ini adalah persamaan tahap grayscaling citra :
x = 0.299R + 0.587G + 0.114B (2.1)
Dimana, nilai citra RGB adalah (R, G, B) dengan nilai integer diantara 0 sampai 255, dan x adalah nilai grayscale.
2. Cropping (tahap pemisahan citra objek dengan latar belakangnya)
Pada tahapan ini terjadi pemotongan citra yang memisahkan citra objek dengan citra masukannya, tujuannya untuk mengambil citra yang hanya diperlukan untuk proses ekstraksi, dalam hal ini adalah citra objek dan membuang citra lain yang tidak diperlukan. Dimensi citra yang dipotong disesuaikan dengan dimensi dari proses segmentasi atau pengkotakan objek yang dilakukan pada proses pendeteksian objek.
3. Resizing (tahap normalisasi dimensi citra)
Pada tahap resizing citra, terjadi proses normalisasi dimensi citra objek, yaitu proses pembesaran atau pengecilan dimensi citra objek menjadi dimensi yang telah ditentukan. Tujuannya, untuk menyamakan dimensi objek dari tiap citra yang dimasukkan, sehingga pada proses ekstraksi citra nanti tidak ada perbedaaan dimensi dari matriks data citra objek.
4. Equalizing (tahap koreksi tingkat kecerahan citra)
Tahap ini adalah tahapan terakhir dari proses penyelarasan, yang tujuannya untuk memperjelas tahapan-tahapan sebelumnya.
2.2.4 Objek Dalam Citra
Mengenali suatu objek dalam citra dapat dilakukan dengan cara mengidentifikasi pola objek tersebut. Secara umum, pengertian pola (pattern), atau dikenal dengan istilah ciri/fitur, adalah komposit, gabungan atau himpunan dari fitur yang merupakan sifat dari suatu objek. Ciri/ fitur adalah segala jenis aspek pembeda atau cirri-ciri yang membedakan. Ciri inilah yang digunakan dalam melakukan identifikasi terhadap objek yang dikenali. Oleh karena itu pemilihan fitur sangat menentukan keberhasilan dalam pengenalan pola. Ukuran fitur diperoleh dari hasil ekstraksi fitur pada objek. Ukuran fitur berwujud simbolik (misalnya warna) atau numeric (misalnya tinggi). Fitur yang bagus adalah fitur yang memiliki daya pembeda yang tinggi, sehingga pengenalan/ pengelompokan pola berdasarkan fitur yang dapat dilakukan dengan keakuratan yang tinggi (Putra, 2010).
2.3 Metode V iola – Jones
Proses deteksi adanya citra objek dalam sebuah gambar dapat dilakukan dalam OpenCV (Open Computer Vision) yang diintegrasikan dengan software pemrograman. Salah satu metode pendeteksi objek yang umum saat ini yaitu menggunakan sebuah metode yang dipublikasikan oleh Paul Viola dan Michael Jones tahun 2001. Umumnya disebut metode Viola-Jones. Pendekatan untuk mendeteksi objek dalam gambar menggabungkan empat konsep utama :
1. Fitur segi empat sederhana yang disebut fitur Haar. 2. Integral gambar untuk pendeteksian fitur secara cepat. 3. Metode machine learning adabost.
4. Pengklasifikasi bertingkat (cascade classifier) untuk menghubungkan banyak fitur secara efisien.
Salah satu penelitian tentang pendeteksi objek dengan menggunakan konsep yang sama dilakukan oleh RD. Kusumanto, Wahyu S. Pambudi, dan Alan N. Tompunu (2012). Penelitian tersebut diterapkan pada deteksi wajah dengan hasil citra statis error sebesar 28% terjadi pada saat gambar berisi 7 orang dengan jumlah wajah terdeteksi sebanyak 9 wajah.
2.3.1 Kelebihan dan kekurangan Metode Viola-Jones
Metode ini memiliki kelebihan yaitu komputasinya sangat cepat, karena hanya bergantung pada jumlah pixel dalam persegi bukan setiap nilai pixel dari sebuah image. Dibandingkan dengan algoritma lain algoritma Viola-Jones ini memiliki proses yang lebih cepat dan memiliki keakurasian hingga 90% dalam melakukan proses pendeteksian objek.
2.3.2 Tahapan Metode Viola-Jones 2.3.2.1 Fitur
Untuk pemilihan fitur menggunakan metode machine learning yang disebut Adabost. Adabost menggabungkan banyak classifier lemah untuk membuat sebuah classifier kuat. Lemah berarti urutan filter pada classifier hanya mendapatkan jawaban benar lebih sedikit. Jika keseluruhan classifier lemah
digabungkan maka akan menjadi classifier yang lebih kuat. Adabost memilih sejumlah classifier lemah untuk disatukan dan menambahkan bobot pada setiap classifier, sehingga akan menjadi classifier yang kuat. Viola-Jones menggabungkan beberapa Adabost classifier sebagai rangkaian filter yang cukup efisien untuk menggolongkan daerah gambar. Masing-masing filter adalah satu Adabost classifier terpisah yang terdiri classifier lemah atau satu filter fitur. (Bondan dkk, 2012). Hasil pemilihan fitur tersebut digunakan untuk menentukan nilai dari threshold yang akan dilakukan. Pada awalnya, pemrosesan gambar hanya memproses nilai RGB (Red Green Blue) dari setiap pixel yang dimiliki oleh gambar tersebut. Namun, lama kelamaan hal ini membuat proses tersebut kurang efisien karena menggunakan resource yang besar sedangkan hasil yang didapat kecil. Setelah itu pemrosesan gambar mengalami sebuah perkembangan, terinspirasi dari Haar wavelets, Viola dan Jones mengembangkan proses pengolahan gambar baru, kemudian terciptalah Haar-Like feature. Adanya fitur Haar ditentukan dengan cara mengurangi rata-rata pixel pada daerah gelap dari rata-rata pixel pada daerah terang. Jika nilai perbedaannya itu di atas nilai ambang atau threshold, maka dapat dikatakan bahwa fitur tersebut ada.
Nilai Haar Like Feature diperoleh dari selisih jumlah nilai pixel daerah gelap dengan jumlah nilai pixel daerah terang (Santoso dan Harjoko 2013)
F Harr = |Total pixel hitam - Total pixel putih| (2.2) F Harr = Nilai fitur total
Pixel putih = Nilai fitur pada daerah terang Pixel hitam = Nilai fitur pada daerah gelap
Metode Viola-jones menggunakan data latih dari citra-citra yang kurang tajam sebagai bagian dari proses pengklasifikasian citra. Klasifikasi citra dilakukan berdasarkan nilai dari sebuah fitur. Penggunaan fitur dilakukan karena
pemrosesan fitur berlangsung lebih cepat dibandingkan pemrosesan citra per pixel.
Terdapat tiga jenis fitur berdasarkan jumlah persegi panjang yang terdapat di dalamnya. Fitur-fitur inilah yang biasa disebut sebagai Haar-like features (Mulyawati dan Bahar , 2014).
Gambar 2.3. H aar-like features (Mulyawati dan Bahar, 2014)
1. Pada gambar di atas dapat dilihat bahwa fitur a dan b mempunyai dua persegi panjang. Fitur yang memiliki dua persegi panjang merupakan perbedaan antara jumlah pixel dalam dua daerah persegi panjang. Daerah persegi panjang memiliki ukuran dan bentuk yang sama dan posisi horizontal atau vertikal yang saling berdekatan.
2. Fitur yang memiliki tiga persegi panjang adalah jumlah dari dua persegi panjang luar dikurangi dengan jumlah dari persegi panjang pusat.
3. Fitur yang memiliki empat persegi panjang adalah nilai dari perbedaan antara pasangan diagonal dari persegi panjang
2.3.2.2 Integral Image
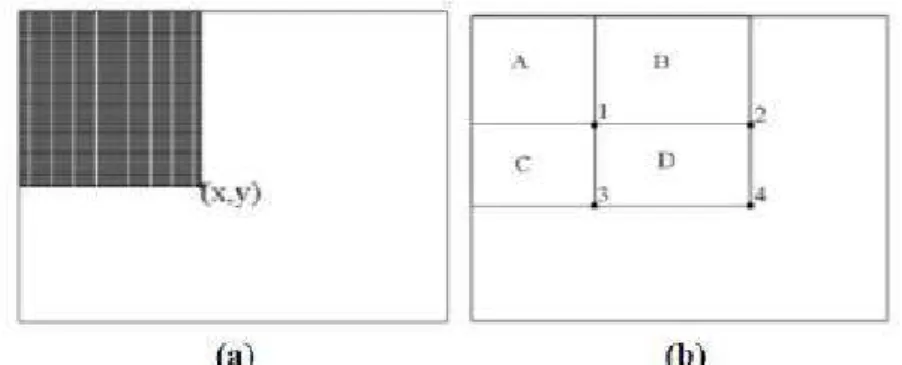
Untuk menentukan ada atau tidaknya dari ratusan fitur Haar pada sebuah gambar dan pada skala yang berbeda secara efisien, Viola dan Jones menggunakan satu teknik yang disebut Integral Gambar. Pada umumnya, pengintegrasian tersebut berarti menambahkan unit-unit kecil secara bersamaan. Dalam hal ini unit-unit kecil tersebut adalah nilai-nilai pixel. Nilai integral untuk masing-masing pixel adalah jumlah dari semua pixel-pixel dari atas sampai bawah. Dimulai dari kiri atas sampai kanan bawah, keseluruhan gambar itu dapat
dijumlahkan dengan beberapa operasi bilangan bulat per pixel. Setelah pengintegrasian, nilai pada lokasi pixel (x,y) berisi jumlah dari semua pixel di dalam daerah segiempat dari kiri atas sampai pada lokasi (x,y) atau daerah yang diarsir.
Gambar 2.4. Perhitungan nilai pixel region dengan integral gambar (RD. Kusumanto, 2012)
Untuk menentukan nilai rata-rata pixel pada area segiempat (daerah yang diarsir) ini dapat dilakukan hanya dengan membagi nilai pada (x,y) oleh area segiempat. Untuk mengetahui nilai pixel untuk beberapa segiempat yang lain misal, seperti segiempat D pada gambar di atas dapat dilakukan dengan cara menggabungkan jumlah pixel pada area segiempat A+B+C+D, dikurangi jumlah dalam segiempat A+B dan A+C, ditambah jumlah pixel di dalam A. Dengan, A+B+C+D adalah nilai dari integral gambar pada lokasi 4, A+B adalah nilai pada lokasi 2, A+C adalah nilai pada lokasi 3, dan A pada lokasi 1. Sehingga hasil dari D dapat dikomputasikan :
= ( + + + ) − ( + ) − ( + ) + (2.3)
Keterangan :
A,B,C,D = Nilai pixel pada area segiempat
Untuk memudahkan proses perhitungan nilai dari setiap fitur Haar pada setiap lokasi gambar digunakan teknik yang disebut citra integral. Secara umum integral mempunyai makna menambahkan bobot, bobot merupakan
nilai-nilai pixel yang akan ditambahkan ke dalam gambar asli.
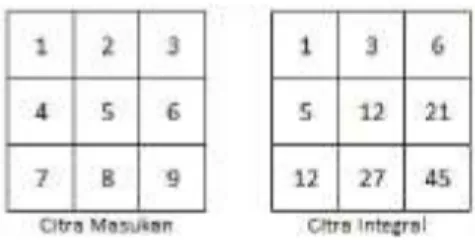
Nilai integral dari setiap pixel merupakan jumlah dari semua pixel sebelah atasnya dan di sebelah kirinya. Keseluruhan gambar dapat diintegrasikan dengan operasi bilangan bulat per pixel.
Gambar 2.5. Contoh Citra Integral
Dengan mendapatkan nilai dari citra integral maka jumlah dari seluruh pixel yang ada dalam setiap persegi panjang dapat dihitung dengan empat nilai. Nilai-nilai ini merupakan pixel pada citra integral yang bertepatan dengan sudut-sudut persegi panjang yang ada pada citra masukkan.
Gambar 2.6. Jumlah dari seluruh pixel yang ada pada setiap persegi panjang
Untuk memilih fitur Haar yang khusus untuk digunakan dalam proses pendeteksian objek dan untuk menetapkan ambang batas maka digunakan teknik pembelajaran yang disebut sebagai algoritma AdaBoost (Mulyawati dan Bahar, 2014).
2.3.2.3 Ababoost learning
Untuk memilih fitur Haar yang spesifik yang akan digunakan dan untuk mengatur nilai ambangnya (threshold), Viola dan Jones menggunakan sebuah metode machine learning yang disebut Adabost. Adabost menggabungkan banyak
classifier lemah untuk membuat sebuah classifier kuat. Lemah disini berarti urutan filter pada classifier hanya mendapatkan jawaban benar lebih sedikit.
Nilai ambang batas pada setiap filter diatur setiap saat proses filter terjadi, sehingga nilai dari ambang batas bersifat dinamis. Filter pada setiap tingkat telah dilatih untuk mengklasifikasi citra yang telah melalui tahap sebelumnya. Saat proses pengklasifikasian, jika salah satu filter gagal terlewati maka citra dapat dikatakan sebagai daerah yang bukan objek misalnya mobil. Jika citra belum cukup untuk dikatakan sebagai strong classifier maka proses diulang sampai bobot terpenuhi dengan menaikkan nilai dari ambang batas. Ketika citra dapat melewati setiap filter yang ada di dalam rantai, maka dapat dikatakan daerah tersebut merupakan objek mobil.
Jika keseluruhan classifier lemah digabungkan maka akan menjadi classifier yang lebih kuat. Adabost memilih sejumlah classifier lemah untuk disatukan dan menambahkan bobot pada setiap classifier, sehingga akan menjadi classifier yang kuat. Viola-Jones menggabungkan beberapa Adabost classifier sebagai rangkaian filter yang cukup efisien untuk menggolongkan daerah gambar. Masing-masing filter adalah satu Adabost classifier terpisah yang terdiri classifier lemah atau satu filter Haar. Threshold yang dapat diterima untuk masing-masing level filter di set rendah. Selama proses pemfilteran, bila ada salah satu filter gagal untuk melewatkan sebuah daerah gambar, maka daerah itu langsung digolongkan sebagai bukan objek. Namun ketika filter melewatkan sebuah daerah gambar dan sampai melewati semua proses filter yang ada dalam rangkaian filter, maka daerah gambar tersebut digolongkan sebagai objek. Viola dan Jones memberi sebutan cascade. Urutan filter pada cascade ditentukan oleh bobot yang diberikan Adabost. Filter dengan bobot paling besar diletakkan pada proses pertama kali, bertujuan untuk menghapus daerah gambar bukan objek secepat mungkin (Mulyawati dan Bahar, 2014).
2 . 3 . 2 . 4 C ascade Classifier
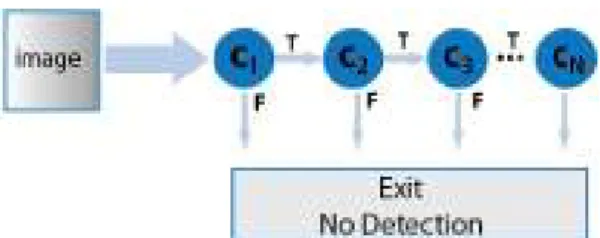
Cascade of classifier merupakan proses pengklasifikasian atau classifier yang bertumpuk, hal ini bertujuan untuk meningkatkan efisiensi dari proses klasifikasi.
Klasifikasi pada algoritma ini terdiri dari beberapa tingkatan dimana tiap tingkatan mengeluarkan subcitra yang diyakini bukan target (target objek). Hal ini dilakukan karena lebih mudah untuk menilai subcitra bukan objek dari pada menilai apakah subcitra tersebut berisi objek. Pada gambar 9 menggambarkan bentuk alur kerja dari klasifikasi bertingkat.
Gambar 2.7. Metode Cascade of Classifier (RD. Kusumanto, 2012)
Pada klasifikasi tingkat pertama, tiap subcitra akan diklasifikasi menggunakan satu fitur. Hasil dari klasifikasi pertama ini berupa T (True) untuk gambar yang memenuhi fitur Haar tertentu dan F (False) bila tidak. Klasifikasi ini kira-kira akan menyisakan 50% subcitra untuk diklasifikasi di tahap kedua. Hasil dari klasifikasi kedua berupa T (True) untuk gambar yang memenuhi proses integral gambar dan F (False) bila tidak. Seiring dengan bertambahnya tingkatan klasifikasi, maka diperlukan syarat yang lebih spesifik sehingga fitur yang digunakan menjadi lebih banyak. Jumlah subcitra yang lolos klasifikasi pun akan berkurang hingga mencapai jumlah sekitar 2%. Hasil dari klasifikasi terakhir berupa T (True) untuk gambar yang memenuhi proses Adabost dan F (False) bila tidak (Teguh Bharata, 2012).
2.4 RMSE (Root Mean Square Error)
Untuk melihat tingkat kegagalan sistem dari hasil perancangan dapat dihitung dengan menggunakan rumus Root Mean Square Error (RMSE). Semakin tinggi nilai RMSE maka sistem dikatakan error (gagal), dan jika nilai RMSE rendah maka sistem mengalami error yang rendah. Adapun rumus Root Mean Square Error (RMSE) sebagai berikut :
= ∑ ( )
(2.4) Keterangan:
N : Jumlah sampel data
A : Jumlah mobil dalam sampel gambar dihitung manual
M : Jumlah mobil yang dapat terdeteksi (Yosep dan Indrabulan, 2013) Karena sistem yang dirancang ini tidak hanya mendeteksi mobil, dalam artian ada objek lain yang dideteksi sebagai mobil, maka tingkat keakuratan sistem dalam mendeteksi hanya mobil dapat dihitung dengan membagi nilai total deteksi hanya mobil dengan nilai total terdeteksi kemudian dinyatakan dalam persen. (Mulyawati dan Bahar, 2014)
% = ∑ ∑ ∗ 100% (2.5)
ℎ = 100 − % (2.6)
2.5 Pemrograman J av a 2.5.1 Pengenalan J av a
Java merupakan bahasa pemrograman yang dikembangkan oleh Sun Microsistem. Bahasa Java dirancang sedemikian rupa agar perangkat lunak yang dibuat menggunakan bahasa Java dapat berjalan pada semua Platform (Platform independence). Ini berati bahwa sekali suatu program ditulis atau aplikasi dibangun maka dapat dijalankan pada berbagai sistem operasi sebagaimana mestinya, Tanpa perlu melakukan kompilasi ulang. Java termasuk salah satu bahasa yang menerapkan konsep pemrograman berorientasi objek (OOP).
Beberapa kelebihan Java antara lain adalah sebagai berikut:
1. Multi Platform merupakan program yang dapat digunakan di beberapa Platform / sistem operasi komputer, sesuai dengan prinsip tulis sekali, jalankan di mana saja.
3. Perpustakaan Kelas Yang Lengkap. Java terkenal dengan kelengkapan library/perpustakaan (kumpulan program program yang disertakan dalam pemrograman Java) yang sangat memudahkan dalam penggunaan oleh para pemrogram untuk membangun aplikasinya. Kelengkapan perpustakaan ini ditambah dengan keberadaan komunitas Java yang besar yang terus menerus membuat perpustakaan-perpustakaan baru untuk melingkupi seluruh kebutuhan pembangunan aplikasi.
4. Bergaya C++, yaitu Memiliki sintaks seperti bahasa pemrograman C++ sehingga menarik banyak pemrogram C++ untuk pindah ke Java. Saat ini pengguna Java sangat banyak, sebagian besar adalah pemrogram C++ yang pindah ke Java.
5. Pengumpulan sampah otomatis, Memiliki fasilitas pengaturan penggunaan memori sehingga para pemrogram tidak perlu melakukan pengaturan memori secara langsung (seperti halnya dalam bahasa C++ yang dipakai secara luas), (Hermawan dan Benny, 2004).
2.6 IDE N etBeans
IDE NetBeans adalah sebuah lingkungan pengembangan, sebuah tools untuk programmer menulis, mengompilasi, mencari kesalahan dan menyebarkan program. IDE NetBeans ditulis dalam Java, namun dapat mendukung bahasa pemrograman lain. Terdapat banyak modul untuk memperluas IDE NetBeans. IDE NetBeans adalah sebuah produk bebas dengan tanpa batasan bagaimana digunakan.
NetBeans mengacu pada dua hal, yakni Platform untuk pengembangan desktop Java, dan sebuah Integrated Development Environment (IDE) yang dibangun menggunakan Platform NetBeans. Platform NetBeans memungkinkan aplikasi dibangun dari sekumpulan komponen-komponen perangkat lunak moduler yang disebut ‘Modul’. Sebuah modul adalah suatu arisp Java (Java Archive) yang membuat kelas-kelas Java untuk berinteraksi dengan NetBeans Open API dan file manifestasi yang mengidentifikasinya sebagai modul. Aplikasi yang dibangun dengan modul-modul dapat dikembangkan dengan menambahkan
modul-modul baru. Karena modul dapat dikembangkan secara independen, aplikasi berbasis Platform NetBeans dapat dengan mudah dikembangkan oleh pihak ketiga secara mudah dan powerful (Hermawan dan Benny, 2004).
2.7 OpenCV (Intel® Open Source Computer Vision Library)
OpenCV merupakan singkatan dari Intel Open Source Computer Vision Library yang sekurang-kurangnya terdiri dari 300 fungsi-fungsi C, bahkan bisa lebih. Software ini gratis, dapat digunakan dalam rangka komersil maupun non komersil, tanpa harus membayar lisensi ke intel. OpenCV dapat beroperasi pada komputer berbasis Windows ataupun Linux. Library OpenCV adalah suatu cara penerapan bagi komunitas open source visionyang sangat membantu dalam kesempatan meng-update penerapan computer vision sejalan dengan pertumbuhan PC (personal computer) yang terus berkembang. Software ini menyediakan sejumlah fungsi-fungsi image processing, seperti halnya dengan fungsi-fungsi analisis gambar dan pola. Beberapa contoh aplikasi dari OpenCV adalah pada Human-Computer Interaction (interaksi manusia komputer); Object Indentification (Identifikasi Objek), Segmentation (segmentasi) dan Recognition (pengenalan), Face Recognition (pengenalan wajah), Gesture Recognition (pengenalan gerak isyarat), Motion Tracking (penjajakan gerakan), Ego Motion (gerakan ego), dan Motion Understanding (pemahaman gerakan); Structure From Motion (gerakan dari struktur) dan Mobile Robotics (robot-robot yang bergerak). 2.8 Metode Pengembangan Sistem
2.8.1 UML ( U N IF IE D M O D E L L IN G L A N G U A G E ) Unified Modelling Language (UML) adalah salah satu alat bantu yang sangat handal di dunia pengembangan sistem yang berorientasi objek (Munawar, 2005). UML merupakan kesatuan dari bahasa pemodelan yang dikembangkan oleh Booch, Object Modelling Technique (OMT) dan Object Oriented Software Engineering (OOSE). Metode Booch dari Grady Booch sangat terkenal dengan nama metode Design Object Oriented. Metode ini menjadikan proses analisis dan design ke dalam empat tahapan iteratif, yaitu : identifikasi kelas-kelas dan
objek-objek, identifikasi semantik dari hubungan objek dan kelas tersebut, perincian interface, dan implementasi.
Diagram UML yang digunakan dalam penelitian ini berjumlah 4 buah karena telah cukup untuk menjelaskan tentang sistem yang akan dibangun. Diagram-diagram tersebut adalah :
2 . 7 . 1 . 1 . Use Case Diagram
Use case diagram adalah diagram yang menampilkan aktor, use case dan hubungan yang terjadi antara aktor dan use case. Use case adalah teknik untuk merekam persyaratan fungsional sebuah sistem. Use case mendeskripsikan interaksi tipikal antara para pengguna sistem dengan sistem itu sendiri, dengan memberi sebuah narasi tentang bagaimana sistem tersebut digunakan. Aktor merupakan sebuah peran yang dimainkan seorang pengguna dalam kaitannya dengan sistem (Munawar, 2005).
Tabel 2.1 Simbol Use Case Diagram
NO GAMBAR NAMA KETERANGAN
1 Actor
Menspesifikasikan himpuan peran yang pengguna mainkan ketika berinteraksi dengan use case.
2 Dependency
Hubungan dimana perubahan yang terjadi pada suatu elemen mandiri (independent) akan mempengaruhi elemen yang bergantung padanya elemen
yang tidak mandiri
(independent).
3 Generalization
Hubungan dimana objek anak (descendent) berbagi perilaku dan struktur data dari objek yang ada di atasnya objek induk.
Tabel 2.1 (Lanjutan)
NO GAMBAR NAMA KETERANGAN
4 Include Menspesifikasikan bahwa use
case sumber secara eksplisit.
5 Extend
Menspesifikasikan bahwa use case target memperluas perilaku dari use case sumber pada suatu titik yang diberikan.
6 Association
Apa yang menghubungkan antara objek satu dengan objek lainnya.
7 Sistem
Menspesifikasikan paket yang menampilkan sistem secara terbatas.
8 Use Case
Deskripsi dari urutan aksi-aksi yang ditampilkan sistem yang menghasilkan suatu hasil yang terukur bagi suatu aktor
9 Collaboration
Interaksi aturan-aturan dan elemen lain yang bekerja sama untuk menyediakan prilaku yang lebih besar dari jumlah dan elemen-elemennya (sinergi).
10 Note
Elemen fisik yang eksis saat aplikasi dijalankan dan mencerminkan suatu sumber daya komputasi
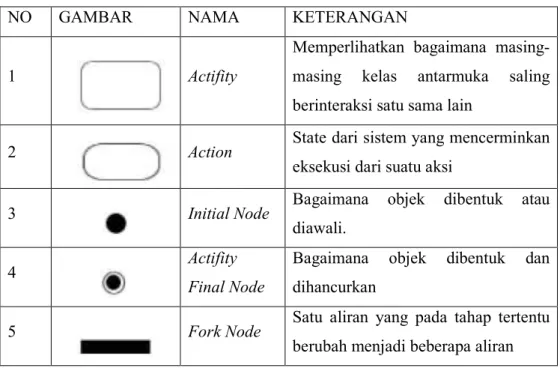
2 . 8 . 1 . 1 A c tiv ity D iagram
Activity Diagram adalah teknik untuk menggambarkan logika prosedural, proses bisnis dan jalur kerja. Dalam beberapa hal, activity diagram memainkan peran mirip sebuah diagram alir, tetapi perbedaan prinsip antara activity diagram dan notasi diagram alir adalah diagram ini mendukung perilaku paralel (Munawar, 2005).
Tabel 2.2 Simbol Activity Diagram
NO GAMBAR NAMA KETERANGAN
1 Actifity
Memperlihatkan bagaimana masing-masing kelas antarmuka saling berinteraksi satu sama lain
2 Action State dari sistem yang mencerminkan
eksekusi dari suatu aksi
3 Initial Node Bagaimana objek dibentuk atau
diawali.
4 Actifity
Final Node
Bagaimana objek dibentuk dan dihancurkan
5 Fork Node Satu aliran yang pada tahap tertentu
berubah menjadi beberapa aliran
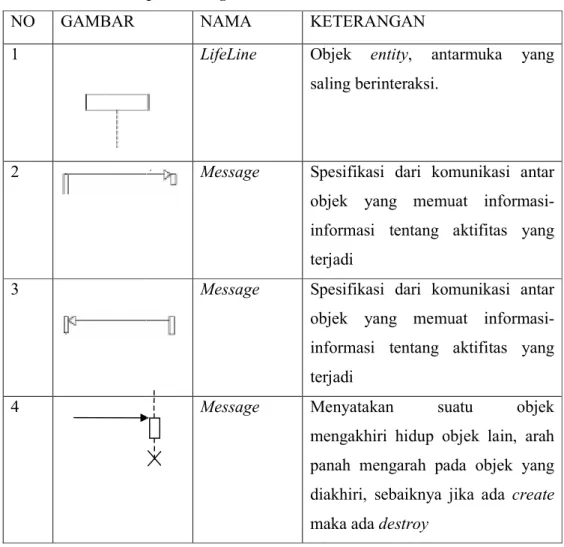
2.8.1.2 Sequence Diagram
Sequence diagram menjabarkan perilaku sebuah skenario. Skenario adalah rangkaian langkah-langkah yang menjabarkan sebuah interaksi antara seorang pengguna dengan sebuah sistem. Sequence diagram menunjukkan sejumlah objek contoh dan pesan-pesan yang melewati objek-objek tersebut di dalam use case (Munawar, 2005).
Tabel 2.3. simbol sequence diagram NO GAMBAR 1 2 3 4 2.9 Flowchart Diagram
Flowchart dikembangkan oleh Herman Goldstine dan John von Neumann di tahun 1940-an, sebagai representasi grafis dari keputusan dan hasil keputusan dipetakan dalam bentuk individu.
yang berisi informasi tentang langkah
masing dari simbol-simbol ini terkait dengan panah untuk menggambarkan arah aliran proses. Bagan alur (
(flow) di dalam program atau prosedur sistem secara logika. Bagan a terutama untuk alat bantu komunikasi dan untuk dokumentasi.
flowchart dapat disimpulkan sebagai sebuah metodologi yang digunakan untuk sequence diagram
NAMA KETERANGAN
LifeLine Objek entity, antarmuka yang saling berinteraksi.
Message Spesifikasi dari komunikasi antar objek yang memuat
informasi tentang aktifitas yang terjadi
Message Spesifikasi dari komunikasi antar objek yang memuat informasi informasi tentang aktifitas yang terjadi
Message Menyatakan suatu objek
mengakhiri hidup objek lain, arah panah mengarah pada objek yang diakhiri, sebaiknya jika ada maka ada destroy
Diagram
dikembangkan oleh Herman Goldstine dan John von Neumann di an, sebagai representasi grafis dari keputusan dan hasil keputusan dipetakan dalam bentuk individu. Flowchart menggunakan simbol yang berbeda yang berisi informasi tentang langkah-langkah atau urutan kejadian.
simbol ini terkait dengan panah untuk menggambarkan arah aliran proses. Bagan alur (flowchart) adalah bagan (chart) yang menunjukan hasil
dalam program atau prosedur sistem secara logika. Bagan a terutama untuk alat bantu komunikasi dan untuk dokumentasi.
dapat disimpulkan sebagai sebuah metodologi yang digunakan untuk , antarmuka yang
Spesifikasi dari komunikasi antar objek yang memuat informasi-informasi tentang aktifitas yang Spesifikasi dari komunikasi antar objek yang memuat informasi-informasi tentang aktifitas yang
Menyatakan suatu objek
mengakhiri hidup objek lain, arah panah mengarah pada objek yang diakhiri, sebaiknya jika ada create
dikembangkan oleh Herman Goldstine dan John von Neumann di an, sebagai representasi grafis dari keputusan dan hasil keputusan menggunakan simbol yang berbeda ah atau urutan kejadian. Masing-simbol ini terkait dengan panah untuk menggambarkan arah
) yang menunjukan hasil dalam program atau prosedur sistem secara logika. Bagan alir digunakan terutama untuk alat bantu komunikasi dan untuk dokumentasi. Pengertian dapat disimpulkan sebagai sebuah metodologi yang digunakan untuk
menganalisis, meningkatkan, dokumen dan mengelola proses atau program. Flowchart merupakan cara penyajian dari suatu algoritma.
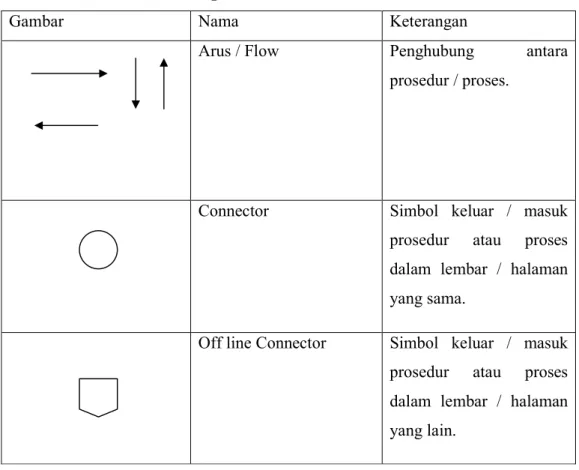
Simbol yang dipakai untuk menghubungkan antara simbol yang satu dengan simbol lainnya atau disebut juga connecting line.
Tabel 2.4. Simbol Connecting
Gambar Nama Keterangan
Arus / Flow Penghubung antara
prosedur / proses.
Connector Simbol keluar / masuk
prosedur atau proses dalam lembar / halaman yang sama.
Off line Connector Simbol keluar / masuk prosedur atau proses dalam lembar / halaman yang lain.
Simbol Processing merupakan simbol yang menunjukkan jenis operasi pengolahan dalam suatu prosedur.
Tabel 2.5. Simbol Processing
Gambar Nama Keterangan
Process Simbol yang menunjukkan
pengolahan yang dilakukan computer
Tabel 2.5 (Lanjutan)
Gambar Nama Keterangan
Decision Simbol untuk kondisi yang akan
menghasilkan beberapa
kemungkinan jawaban / aksi Predefined Process Simbol untuk mempersiapkan
penyimpanan yang akan
digunakan sebagai tempat pengolahan didalam storage
Terminal Simbol untuk permulaan atau
akhir darti suatu program
Manual Input Simbol untuk pemasukan data secara manual on-line keyboard
Input Output simbol merupakan simbol yang dipakai untuk menyatakan jenis peralatan yang digunakan sebagai media input atau output.
Tabel 2.6. Simbol Input-Output
Gambar Nama Keterangan
Input-Output Simbol yang menyatakan proses
input dan output tanpa tergantung dengan jenis peralatannya.
Tabel 2.6 (Lanjutan)
Gambar Nama Keterangan
Document Simbol yang menyatakan input
berasal dari dokumen dalam bentuk kertas atau output di cetak dikertas
Disk and On-line Storage Simbol untuk menyatakan input berasal dari disk atau output di simpan ke disk
Pedoman dalam menggambar suatu bagan alir, analis sistem atau pemrograman sebagai berikut;
1. Bagan alir sebaiknya digambar dari atas ke bawah dan mulai dari bagian kiri dari suatu halaman.
2. Kegiatan didalam bagan alir harus ditunjukan dengan jelas.
3. Harus ditunjukkan dari mana kegiatan akan dimulai dan dimana akan berakhirnya.
4. Masing-masing kegiatan didalam bagan alir sebaiknya digunakan suatu kata yang mewakili suatu pekerjaan, misalnya;“persiapkan” dokumen “hitung” gaji.
5. Masing-masing kegiatan didalam bagan alir harus didalm urutan yang semestinya.
6. Kegiatan yang terpotong dan akan disambung ketempat lain harus ditunjukan dengan jelas menggunakan simbol penghubung.
30 BAB III
METODOLOGI PENELITIAN 3.1 Tempat dan Waktu Penelitian
Penelitian tugas akhir Sistem Pendeteksi Jumlah Mobil Dalam Intelligent Transport Sistem (ITS) Menggunakan Metode Viola-Jones dilakukan di wilayah lampu merah Jl. tol di kota Makassar dan kawasan sekitar lampu merah eks MTQ di kota Kendari
Tabel 3.1. Tabel waktu penelitian
No Tahapan RUP
Waktu (2015-2016)
Juli Agustus Sept- Okt- Nov- Des- Jan- Feb- 3 4 1 2 3 4 1 2 3 4 3 4 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1. Inception 2. Elaboration 3. Construction 4. Transition
3.2 Data yang Digunakan
Data yang digunakan dari penelitian tugas akhir ini adalah data yang langsung berkaitan dengan objek penelitian, dalam hal ini data diperoleh melalui pengambilan data langsung di lapangan yaitu di kawasan lampu merah Jl. tol di kota Makassar dan kawasan sekitar lampu merah eks MTQ di kota Kendari
Jumlah data yang digunakan sejumlah 62 sampel uji yang terdiri dari : 1. 12 sampel posisi 45°
2. 14 sampel uji 1 mobil 3. 12 sampel uji 2 mobil
4. 12 sampel uji lebih dari 3 mobil
3.3 Metodologi Pengumpulan Data
Metode yang dilakukan dalam proses pengumpulan data antara lain adalah sebagai berikut :
3.3.1 Pengumpulan Data sekunder
Metode ini digunakan untuk mencari literatur atau sumber pustaka yang berkaitan dengan perangkat lunak yang dibuat dan membantu mempertegas teori-teori yang ada serta memperoleh data yang sesungguhnya.
3.3.2 Pengumpulan Data primer
Pengambilan data adalah salah satu metode pengumpulan data dengan mengambil sampel data yang langsung berkaitan dengan objek penelitian dari tugas akhir ini. Pengambilan data dilakukan secara langsung menggunakan kamera digital di lampu merah Jl. tol di kota Makassar dan kawasan sekitar lampu merah eks MTQ di kota Kendari.
3.4 Prosedur Pengembangan Perangkat Lunak
Metodologi pengembangan sistem yang digunakan adalah metode Rational Unified Process (RUP) karena pengembangan aplikasi ini dalam ruang lingkup kecil/ menengah. Terdapat beberapa tahapan dalam metode ini, yaitu:
1. Inception
Pada tahap ini penulis menentukan batasan ruang lingkup permasalahan yang dilakukan penulis dari hasil penelitian skripsi-skripsi terdahulu.
2. Elaboration
Pada tahap ini setelah penulis mengadakan studi pustaka, kemudian penulis melakukan identifikasi masalah kemacetan lalu lintas, menentukan alur dan aplikasi serta persoalan data yang akan dibutuhkan oleh sistem yang akan dikembangkan.
3. Modelling (Perancangan)
Untuk perancangan aplikasi, penulis menggunakan alat bantu (tools) yaitu Unified Modelling Language (UML). UML merupakan sebuah bahasa yang menjadi standar untuk visualisasi, perancangan serta pendokumentasian sebuah software. Disebabkan UML menggunakan class dan operation, maka
penggunaan UML lebih cocok digunakan dalam perancangan aplikasi yang bersifat object oriented. Perancangan aplikasi yang penulis lakukan dengan menggunakan tools UML ini, meliputi:
1) Penentuan Actor
2) Perancangan Use Case Diagram 3) Perancangan Activity Diagram 4) Perancangan Sequence Diagram 5) Perancangan Tampilan
Pada tahap ini penulis melakukan perancangan terhadap user interface dari aplikasi ini. Perancangan yang dilakukan meliputi halaman-halaman yang ada di dalam sistem.
4. Construction
Pada tahap ini dilakukan pembangunan sistem melalui proses penulisan kode program (coding). Pembangunan sistem pendeteksi jumlah mobil dilakukan berdasarkan rancangan yang telah direncakan pada tahap konstruksi (construction).
Penulis melakukan pengkodean sistem (coding), bahasa pemrograman yang digunakan adalah bahasa pemrograman java. Pengkodean sistem berisi tahapan-tahapan yang ada pada perhitungan metode Viola-Jones.
5. Transition
Pada tahap ini penulis membuat apa yang sudah dirancangkan pada tahapan sebelumnya seperti merancang dan mendesain sehingga menjadi suatu sistem yang layak pakai dan dilakukan pengujian sistem.
33 BAB IV
ANALISIS DAN PERANCANGAN SISTEM 4.1 Sistem yang Berjalan
Sistem yang berjalan pada lampu merah di kota Kendari saat ini masih menggunakan sistem yang dinamis. Dimana perguliran waktu yang dibutuhkan untuk lampu hijau bersifat tetap, sehingga lampu merah masih belum mampu menjadi solusi untuk mengurangi kepadatan lalu lintas di Kendari.
4.2 Sistem yang Diusulkan
Sistem yang diusulkan adalah sistem pendeteksi jumlah mobil dalam intelligent transport system (ITS) untuk mengatasi kepadatan lalu lintas di Kota Kendari adalah dengan mengetahui terlebih dahulu berapa jumlah mobil yang ada di lampu merah, agar nantinya pada penelitian selanjutnya dapat ditentukan berapa waktu tunggu yang ideal untuk menjalankan mobil tersebut. Adapun Sistem pendeteksi jumlah mobil ini menggunakan metode Viola-Jones, sehingga nantinya akan menampilkan berapa jumlah mobil yang ada di lampu merah.
Gambaran umum sistem pendeteksi jumlah mobil dalam Inteligent Transport Sistem (ITS) menggunakan metode Viola-Jones adalah sebagai berikut:
1. Sebelum user melakukan proses pendeteksian menggunakan metode Viola-Jones, terlebih dahulu user memilih gambar yang akan diuji
2. Setelah itu user akan mulai menginputkan citra uji pada form pendeteksian. Kemudian sistem akan memproses dan menghitung jumlah mobil dalam Intelligent Transport Sistem menggunakan metode Viola-Jones. Data yang dihasilkan dari proses pendeteksian ini adalah jumlah mobil.
4.2.1 Flowchart metode
Gambar 4.1.
metode Viola-Jones
Sebuah fitur haar diawali dengan meng-input citra lalu citra image di prerprocessing menjadi citra grayscale. Proses konversi image dari RGB ke Grayscale menggunakan persamaan dibawah ini :
Misalkan suatu citra objek memiliki nilai R = 100
G = 100 B= 100
Maka nilai grayscale dari citra tersebut dapat dihitung menggunakan Persamaan 2.1 sehingga didapatkan hasil sebagai berikut :
X= (0,299 * 100) + (0,587 * 100) + (0, 114 * 100) = 99,99 Berikut adalah contoh citra hasil grayscalling
Gambar 4.2 Contoh konversi citra RGB menjadi citra grayscale
Setelah melakukan proses grayscale maka proses selanjutnya adalah scaling dan sliding pada window. Jika objek terdeteksi, akan dilakukan penggambaran garis persegi pada gambar mobil tersebut. Pendeteksian objek menggolongkan gambar berdasarkan pada nilai dari fitur sederhana. Operasi dasar dari suatu fitur jauh lebih cepat dibandingkan dengan pengolahan pixel. Sejumlah Fitur haar mewakili wilayah persegi pada citra dan menjumlahkan semua pixel pada daerah tersebut.
Viola-jones mengklasifikasikan citra dari nilai fitur-fitur sederhana dan menggunakan tiga jenis fitur, yaitu fitur persegi, fitur tiga persegi, dan fitur empat persegi. Nilai dari fitur-fitur tersebut adalah selisih antara daerah hitam dan putih.
Gambar 4.3 Sampel perhitungan integral image
Pertama, ditentukan terlebih dahulu area yang akan dideteksi apakah terdapat obyek atau tidak. Proses berikutnya adalah melakukan pendeteksian obyek menggunakan Haar Cascade Clasifier dengan langkah-langkah yang akan dijelaskan sebagai berikut. Integral image adalah sebuah citra yang nilai tiap pixel-nya merupakan penjumlahan nilai pixel atas dan kirinya. Sebagai contoh pada Gambar 4.3 (c) sebuah daerah persegi yang akan di-scan menggunakan persegi gelap terang memiliki nilai sebagai berikut:
Gambar 4.4 Citra Masukan
Pada citra masukan yang diberi persegi pada Gambar 4.3 (c) terlihat pada Gambar 4.5 sebagai berikut:
Gambar 4.5 Persegi haar like pada citra masukan (c)
Proses perhitungan nilai gelap dan nilai terang menggunakan persamaan (2.2) menghasilkan nilai Fitur Haar sama dengan 22. Untuk menghitung Fitur nilai Haar pertama kali dibentuk matriks. Nilai integral image dari citra masukan di Gambar 4.5 terlihat pada Gambar 4.6 sebagai berikut:
Gambar 4.6 Matriks Integral Image dari Citra Masukan Nilai fitur haar dari area matriks pada Gambar 4.6 dapat dihitung menggunakan persamaan 2.2 sehingga didapatkan hasil sebagai berikut :
F Haar = |Total pixel hitam - Total pixel putih| = |(32+2-16-5)-(49+5-32-6)+(77+6-49-9)| = |13 -16 +25 |
Hasil perhitungan secara manual menggunakan persamaan (2.2) di atas menghasilkan nilai 22. Nilai tersebut kemudian dibandingkan dengan threshold yang sudah ditentukan sebagai pendeteksian obyek. Apabila nilai fitur haar lebih tinggi daripada threshold, maka dapat dikatakan pada area tersebut memenuhi filter haar.
Algoritma AdaBoost mengkombinasikan banyak citra-citra yang kurang tajam (weak classifiers) untuk menjadi citra-citra yang lebih tajam (strong classifiers) dengan memberi bobot kepada citra weak classifiers. Secara tidak langsung algoritma AdaBoost ini dapat dikatakan sebagai rantai filter.
Setiap filter merupakan classifier AdaBoost terpisah dengan jumlah weak classifiers yang relatif kecil. Nilai ambang batas pada setiap filter diatur setiap saat proses filter terjadi, sehingga nilai dari ambang batas bersifat dinamis. Filter pada setiap tingkat telah dilatih untuk mengklasifikasi citra yang telah melalui tahap sebelumnya. Saat proses pengklasifikasian, jika salah satu filter gagal terlewati maka citra dapat dikatakan sebagai daerah yang bukan sebagai objek mobil. Jika citra belum cukup untuk dikatakan sebagai strong classifier maka proses diulang sampai bobot terpenuhi dengan menaikkan nilai dari ambang batas. Ketika citra dapat melewati setiap filter yang ada di dalam rantai, maka dapat dikatakan daerah tersebut merupakan objek mobil.
Tabel dibawah ini merupakan penggalan pseudo code dari algoritma AdaBoost. Tabel 4.1. Tabel penggalan pseudocode algoritma adaboost
No Algoritma
1 function adaboost (input sc :
StrongClassifier) array of record 2 {I.S : nilai variabel sc telah
dihasilkan}
3 {F.S : menghasilkan classifier terbaik} 4
5 Kamus :
6 i,j,T : integer 7 **x : integer
8 min_idx, min_error : integer 9 w_sum : integer 10 beta : real 11 *alfa : double 12 fxidx : double 13 values : real 14 15 Algoritma : 16 t ← 20 17 if (t > maxstage) then 18 return -1 19 endif
20 img_count ←pos_count + neg_count 21 for I ←0 to pos_count do
22 labels[i] ← 1 23 endfor
24 for i←pos_count to i<img_count do 25 labels[i] ← −1 26 endfor 27 for i←0 do i<img_count to 28 if (labels[i]) then 29 w[i] ←0.5*1/pos_count; 30 else 31 w[i] ←0.5*1/neg_count; 32 endif 33 endfor 34 for t←0 to t←T do 35 min_error ←0 36 min_idx ←0
37 w_sum ←sum(w, img_count) 38 for i←0 to i<img_count do