Bab 7: Beberapa Topik Lanjut
1 Representasi Low Pass dari Sinyal Bandpass
Tujuan Belajar 1Peserta dapat melakukan sampling sinyal bandpass secara effisien, melalui teknik LP representation dari sinyal BP.
Motivasi :
Misalkan x(t) adalah band-pass signal, maka dapat dibentuk representasi matematis sebagai berikut : ) ( ) ( 2 ) (F V F X F X+ = dimana
V(F) adalah unit step function
X(F) adalah transformasi Fourier dari x(t) maka
∫
∞ ∞ − + + t = X F e dF x ( ) ( ) j2πFt[
2 ( )]
*[
( )]
) ( 1 1 F X F F V F tx+ = − − yaitu analytic or preenvelope of x(t) karena
[
( )]
( ) 1 t x F X F− = dan[
]
t j t F V F π δ + = −1 2 ( ) ( ) maka ) ( * ) ( ) ( x t t j t t x + = + δ πAnalog
A/D
x(n) BPF) ( ˆ ) ( ) ( * 1 ) ( x t x t jx t t j t x + = + = π bila
∫
∞ ∞ − − = ≡ τ τ τ π π t d x t x t t xˆ( ) 1 * ( ) 1 ( )∫
∞ ∞ − − = h t e dt F H( ) ( ) j2πFt < = > − = =∫
∞ ∞ − − 0 0 0 0 1 1 2 F j F F j dt e t Ft j π π 1 ) (F = H < > − = 0 2 1 0 2 1 ) ( F F F π π θterjadi beda fasa sebesar 90o untuk semua frekuensi
Representasi lowpass dari x+(t) dapat dinyatakan sebagai :
1. Xl(F)≡ X +(F+Fc) t F j l c e t x t x( )= +( ) − 2π =
[
x(t)+ jxˆ(t)]
e−j2πFct atau x(t)+ jxˆ(t)=xe(t)ej2πFct ) ( ) ( ) (t u t ju t e x = c + s → complex t F t u t F t u t x( )= c( )cos2π c − s( )sin2π c t F t u t F t u t xˆ( )= c( )sin2π c + s( )cos2π cKomponen frekuensi rendah uc(t) dan us(t) dapat dilihat sebagai amplitude modulations
dengan sinyal carrier masing-masing adalaah cos2πFct dan sin2πFct. Karena komponen
carrier ini dalam fasa quadrature maka uc(t) dan us(t) disebut quadrature components
dari bandpass signal x(t)
2. x(t)=Re
{
[
uc(t)+ jus(t)]
ej2πFct}
{
j Ft}
e c e t x ( ) π Re = xe(t) ⇒ complex envelope of x(t)⇒ equivalent lowpass signal 3. xe(t) a(t)ej (t) θ = dimana a(t)= uc2(t)+us2(t) dan ) ( ) ( tan ) ( 1 t u t u t c s − = θ
( )
t
xˆ
h(t)( )
t
x
maka
[
e j Ft]
c e t x t x( )=Re ( ) 2π =Re[
a(t)ej[2πFct+θ(t)]]
a(t)cos[
2 Ft (t)]
c θ π + =a(t) adalah envelope x(t) dan θ(t) adalah sudut fasa dari x(t)
Hubungan antara spektrum bandpass signal dan representasi lowpass dari BPS.
[
]
{
}
(
)
[
]
[
( ) ( )]
2 1 e ) ( (t)e x 2 1 ) ( 2 1 ) Re( ) ( Re ) ( ) ( * Ftdt j2 -2 * t F j2 e * 2 2 2 c c e c e t F j e Ft j t F j e Ft j F F X F F X e t x F X dt e e t x dt e t x F X c c − − + − = + = ⇒ + = = =∫
∫
∫
∞ ∞ − ∞ ∞ − − ∞ ∞ − − π π π π π ξ ξ ξSpectrum dari X(F) dapat diperoleh dari XL(F) dengan frekuensi translasi.
Sampling BPS. Nyquist → 2B2 samples/sec → geser
2
2 1B
B
F
c=
+
⇒ sampling terhadap low pass
⇒ shifting ⇒ xej2πFct =cos2πFct+ jsin2πFct
⇒ lowpass filter to remove signals at 2Fc
→ Bandwidth ⇒ 2 2 1 2 B B B ≡ − ⇒ Nyquist B samples/sec ⇒ terdapat 2B samples/sec
Sampling x(t) at comparable rates
Let upper frequency = Fc + B/2 = kB
↓ positive integer bila x(t) → sample at 2B = 1/T sample/sec
2 ) 1 2 ( sin ) ( 2 ) 1 2 ( cos ) ( 2 sin ) ( 2 cos ) ( ) ( − − − = − = k n nT U k n nT U nT F nT U nT F nT U nT x s c c s c c π π π π karena 2 B kB Fc = − dan
B
T
2
1
=
⇒ n genap = 2m ) ( (-1) ) 1 2 ( cos ) ( ) ( ) 2 ( 1 m 1 1 mT u k m mT u mT x mT x c c = − = ≡ π ⇒ n ganjil = 2m - 1( )
1 2 2 ) 2 ( 1 1 1 1 − − = − ≡ −T x mT T u mT T mT x s• Jadi even-numbered samples of x(t) yang muncul dengan rate B samples/sec, menghasilkan samples dari LPF uc(t)
• Odd-numbered samples of x(t) (juga dengan B samples per second) menghasilkan us(t)
Rekonstruksi xe(t) dari uc(mT1)
Us(mT1-T1/2)
(
)
(
)
∑
∑
∞ ∞ − ∞ ∞ − − + − + − = − − = ⇒ 2 2 sin ) 2 ( ) ( sin ) ( ) ( 1 1 1 1 1 1 1 1 1 1 1 1 1 T mT t T T mT t T T mT u t u mT t T mT t T mT u t u s s c c π π π πkarena x(t)=uc(t)cos2πFct−us(t)sin2πFct
maka
( ) (
)
(
(
)
)
( )
(
(
)
)
(
)
(
)
∑
∞ −∞ = + + − + − − − + + − − − = m c m c m t F T mT t T T mT t T T M x t F mT t T mT t T mT x t x π π π π π π 2 sin 2 2 2 2 sin 1 2 1 2 cos 2 2 / 2 2 sin 2 1 ) ( 1tetapi
( )
−1mcos2πFct=cos2πFc(
t−2mT)
dan( )
−1m+ksin2πFct=cos2πFc(
t−2mT+T)
( )
(
)
(
)
(
)
∑
∞ −∞ = − − − = ⇒ m c t mT F mT t T mT t T mT x t x π π π 2 cos 2 2 sin ) ( T = 1/2Bs Secara Umum : 2 B Fc ≥ + = B B F r c 2 B → B1⇒ r B B Fc = + 1 2 2 2 1 1 B B F F c c = + − ⇒ 1 . 2 off cut =Fc+B =rBB
B'
(
)
(
)
(
)
∑
∞ −∞ = − − + − + + = ⇒ n c t mT F mT t mT t n x t x 1 1 1 1 2 cos 1 2 1 2 sin ) 1 ( ) ( π π π⇒ x(t) can be represented by samples taken by
[ ]
1 1 1 1 dan 2 1 2 r mana di s/s, 2 1 r r B F B B F r r B T c c = + = + = =Jadi bila Fc Bisnot rB 2
+ , sampling rate musti naik by r r1 Tetapi begitu Fc/B naik,
r r1 →
1 % increase tends to φ of sampling rate Ctt.
( )
( )
(
)
(
)
∑
∞ −∞ = − − − = n n c nT t T nT t T nT x t u 1 1 1 1 1 2 2 2 2 sin 2 1 ) ( π π dan( )
(
)
(
)
(
)
∑
∞ −∞ = + + + − + − − − = n r n s T nT t T T nT t T T nT x t u 1 1 1 1 1 1 1 1 1 2 2 2 2 sin 2 1 ) ( π π r = [r1] ⇒ 2B ≤ Fs < 4B↓ ↓ bila r = 1 r1≈ 2 (worst condition) bila Fc+B/2 = rB
2 Pemrosesan Sinyal Analog Secara Digital
Tujuan Belajar 2Peserta dapat melakukan pemrosesan sinyal waktu kontinu di domain waktu diskrit.
Gambar diatas adalah konfigurasi umum pemroses digital dari sinyal analog. Pertama-tama yang perlu diperhatikan adalah besarnya bandwidth dari sinyal yang akan diproses, karena besarnya bandwidth menentukan sampling rate minimum.
Prefilter, adalah sebuah antialiasing filter yaitu filter analog dengan dua fungsi. Pertama, memastikan bahwa bandwidth dari sinyal yang akan disampling terbatas pada frekuensi yang telah ditentukan, jadi semua komponen frekuensi diatas Fs/2 diredam agar distorsi sinyal akibat aliasing dapat dihilangkan. Fungsi kedua antialiasing filter adalah untuk membatasi spektrum noise dan interferensi lainnya.
Setelah menentukan prefilter dan memilih sampling rate yang dikehendaki, selanjutnya adalah merancang algoritma pemrosesan sinyal. Pemilihan sampling rate Fs = 1/T, dimana T adalah interval sampling, tidak sekedar menentukan frekuensi tertinggi yang akan diproses tetapi juga sebagai faktor skala yang berpengaruh pada spesifikasi filter digital dan sistem waktu diskrit yang diproses.
Contoh :
Terdapat sinyal analog dengan bandwidth 3000 Hz dan disampling pada 8000 Hz, hendak dirancang sebuah differensiator. Dalam hal ini, Fs = 8000 Hz mempunyai folding frequency 4000 Hz, yang dalam sistem waktu diskrit sesuai dengan ω = π. Jadi bandwidth sinyal 3000 Hz sesuai dengan frekuensi ωc = 0.75π. Jadi, differensiator yang
dirancang akan mempunyai passband pada 0 ≤ |ω| ≤ 0.75π.
3 Multirate Signal Processing
Tujuan Belajar 3
Peserta dapat menjelaskan motivasi, definisi dan untung-rugi teknik multirate DSP, termasuk konversi sampling rate.
Sampling rate conversion dapat dilihat sebagai sebuah proses linear filtering
Tujuannya adalah untuk merubah frekuensi sampling Integers Prime Relatively → = D I F F x y
Sampling rate conversion dapat dianggapa sebagai proses digital resampling dari sinyal analog yang sama.
Fy=1/Ty
h(n,m)
y(n)
x(n)
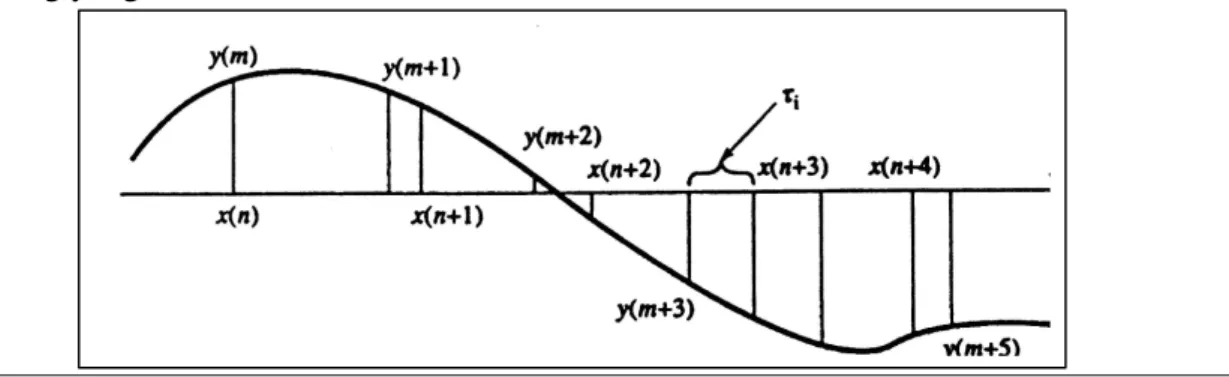
Linear Filtery(m) adalah versi x(n) dengan waktu tergeser. Realisasi dapat dilakukan dengan menggunakan linear filter dengan
- flat magnitude response - linear phase response
i
j
e− ωτ ⇒
↓ time delay
⇒ delay τi berbeda dari sample ke sample
⇒ gunakan sejumlah e-jωτI untuk semua τI
Sampling rate convesion dapat berupa desimasi (down sampling) dengan faktor D atau interpolasi (up sampling) dengan faktor I.
Tujuan Belajar 4
Peserta mengerti proses desimasi dengan faktor D, beserta karakteristik di domain frekuensi
Misal x(n) dengan spektrum X(ω) ingin dilakukan down-sampling dengan faktor D X(ω) non zero 0 ≤ |ω| ≤ω
|F| ≤ Fx/2
Bila x(n) langsung disubsampling maka terjadi aliasing. Jadi x(t) difilter dulu agar bandwitdth menjadi Fmax= Fx/2D atau ωmax= π/D
Karena HD(ω) menghapus π/D < ω < π maka signal yang dikehendaki tidak boleh ada di
daerah yang dihapus tersebut Keluaran dari filter, v(n) adalah
∑
∞ = − = 0 ) ( ) ( ) ( k k n x k h n vDown-sampling dengan faktor D
∑
∞ = = = 0 ) ( ) ( k ) h(k)x(mD-k mD V m y→ time variant system] x(n) → y(m)
x(n-no) → y(n-no) kecuali bila no = kD
Misalkan = ± ± = otherwise 0 D 2 D, 0, n ) ( ) ( ˆ n V n V maka D perioda dengan p(n) impulses of train periodic ) ( ) ( ) ( ˆ ↑ × =v n p n n v Series Fourier 1 ) ( 1 0 / 2 ← =
∑
− = D k D kn j e D n p π Jadi vˆ(n)=v(n)p(n) dan y(m)=v(mD)=v(mD)p(mD)=v(mD)∑
∑
∑
∞ −∞ = − ∞ −∞ = ∞ −∞ = − − = = = m D m m m m m z m v z Y z mD v z m y z Y / ) ( ˆ ) ( ) ( ˆ ) ( ) (karena Vˆ(m)=0 kecuali pada kD
maka
∑
∑
∞ −∞ = − − = = m D m D k D mk j z e D m v z Y / 1 0 / 2 1 ) ( ) ( π(
)
(
)
(
) (
)
∑
∑
∑ ∑
− = − − − = − − = ∞ −∞ = − = = = 1 0 / 1 / 2 / 1 / 2 1 0 / 1 / 2 1 0 / 1 / 2 D 1 D 1 ) ( 1 ) ( D k D D k j D D k j D D k D D k j D k m D D k j z e X z e H z e V z e m v D z Y π π π πkarena V(z) = HD(z)X(z) pada z = ejω maka y y y FT F F π π ω = 2 =2 x y x y D D F F = →ω = ω karena x x x FT F F π π ω = 2 =2 down sampling D x π ω ≤ ≤ ⇒0 ditarik ke 0≤ωy ≤π Jadi
( )
− − =∑
− = D k X D k H D y Y y D k y D π ω π ω ω 1 1 2 2 0Bila HD didesain dengan baik, tidak terjadi aliasing
( )
= = D X D D X D H D y Y ω 1 D ωy ωy 1 ωyD=3
0 ≤ |ωy| ≤π
Tujuan Belajar 5
Peserta mengerti proses interpolasi dengan faktor I, beserta karakteristik di domain frekuensi
Interpolasi adalah mengisi mengisi I-1 sample diantara sample dengan nilai 0.
( )
(
)
= ± ± = otherwise 0 ,... 2 , , 0 /I m I I m x m vrate v(m) = rate y(m)
( )
( )
( )
mI( )
I m m m z X z m v z m v z V = = = − ∞ −∞ = − ∞ −∞ =∑
∑
( ) ( )
I IF F F F I X V x y x y y y y ω ω π ω ω ω = → = ⇒ = = ⇒ / 2 , F terhadap relatif y y( )
≤
≤
=
otherwise
0
I
0
)
(
π
ω
ω
ω
y y yCX
I
Y
C dipilih agar y(m) = X(m/I) untuk m = 0, ±1, ±2, ±… Pada m = 0
∫
∫
− − = = I I y y y y X I d C d Y y / / ) ( 2 ) ( 2 1 ) 0 ( π π π π ω ω π ω ω π karena ωy = ωx/I,( ) ( )
I C o x I C d X I C o y x x = ⇒ = =∫
− ) ( 2 1 ) ( π π ω ω π Akhirnya,( ) ( )
(
) ( )
(
) ( )
∑
∑
∞ −∞ = ∞ −∞ = − = − = = k k k x kI m h k v k m h m y n h n V m y ) ( * ) ( karena v(k) = 0, kecuali k = nI Tujuan Belajar 6Peserta dapat melakukan konversi sampling rate dengan faktor rasional I/D