1
Mahasiswa Jurusan Teknik Elektro UNDIP 2
Staf Pengajar Jurusan Teknik Elektro UNDIP
Makalah Seminar Tugas Akhir
Rancang Bangun Mobile Robot Penjejak Benda Bergerak Berbasis Pengendali PD
(Proposional-Derivative) Menggunakan Mikrokontroler AVR Atmega8535
Endang Dwi Hartanti[1], Iwan Setiawan, S.T, M.T[2], Sumardi, S.T, M.T[2] Jurusan Teknik Elektro, Fakultas Teknik, Universitas Diponegoro
Jln. Prof. Sudharto, Tembalang, Semarang, Indonesia
Abstrak
Hasil kemajuan teknologi seperti robot banyak memberikan bantuan bagi manusia terutama dalam pekerjaan-pekerjaan yang sulit dilakukan oleh manusia. Jenis robot yang umum antara lain manipulator lengan robot dan robot mobil. Pada tugas akhir ini menggunakan mobile robot karena kemudahannya untuk diaplikasikan ke berbagai bidang dan kemudahan dalam pengontrolannya dibanding jenis robot lain.
Tugas Akhir ini bertujuan untuk mengimplementasikan kendali PD (Proposional-Derivative) pada mobile robot penjejak benda bergerak. Kendali PD digunakan untuk mengendalikan kecepatan roda kanan dan roda kiri mobile robot berdasarkan jarak pengukuran masing-masing sensor terhadap benda bergerak yang akan dijejak. Pada mobile robot ini digunakan sensor ultrasonik untuk mengukur jarak antara benda bergerak yang akan dijejak terhadap robot. Dengan demikian, robot dapat menjejak benda bergerak berdasarkan informasi jarak dari masing-masing sensor.
Dari hasil penelitian didapatkan bahwa ketelitian pembacaan sensor ultrasonik sangat mempengaruhi reaksi robot dalam mempertahankan posisi dan orientasinya terhadap benda yang dijejak. Parameter pengendali juga berpengaruh terhadap gerakan dan posisi akhir robot, jika nilai yang diberikan pada konstanta kp dan kd tidak sesuai, maka robot akan mudah berosilasi.
Kata kunci : Robot mobil, Kendali PD, Sensor Ultrasonik, Sistem Navigasi
I. PENDAHULUAN 1.1 Latar Belakang
Hasil kemajuan teknologi seperti robot banyak memberikan bantuan bagi manusia terutama dalam pekerjaan-pekerjaan yang sulit dilakukan manusia. Jenis robot yang umum antara lain manipulator lengan robot dan mobile robot. Pada tugas akhir ini menggunakan mobile robot
karena kemudahannya untuk diaplikasikan ke berbagai bidang dan kemudahan dalam pengontrolannya dibanding jenis robot lain.
Hal penting yang harus diperhatikan yaitu desain sistem penggerak, pembangkitan lintasan (trayektori), dan pengendalian kecepatan pada
mobile robot. Pengemudian mobile robot terbagi menjadi 2 yaitu tipe ackerman (carsteering) dan tipe penggerak diferensial (differensial steering). Tugas Akhir ini akan membuat suatu mobile robot
tipe diferensial, hal ini dikarenakan tipe differensial lebih mudah dalam hal pengendalian. Untuk tipe pengendalinya digunakan pengendali PD (Proposional-Derivative) dan untuk pembangkit lintasannya yaitu mengikuti benda bergerak yang diinginkan.
Sebagai otak pengendali, digunakan mikrokontroler ATmega8535 buatan ATMEL yang akan melaksanakan operasi aritmatika dan logika untuk mewujudkan suatu pengendali PD
(Proposional-Derivative). Mikrokontroler ATmega8535 ini telah banyak digunakan dalam dunia robotika dan automotif, juga memiliki banyak jenis sub-sistem seperti ADC, serial UART, timer, interupt dan port input/output. Selain itu bahasa pemrogramannya menggunakan bahasa C yang relatif mudah dipahami.
1.2 Tujuan
Membuat suatu perangkat keras beserta perangkat lunaknya untuk pengendalian mobile robot dalam menjejak/mengikuti benda bergerak sebagai trayektori berbasis pada pengendali PD (Proporsional-Derivative) dengan menggunakan mikrokontroler AVR ATmega8535.
1.3 Pembatasan Masalah
Pembatasan masalah pada tugas akhir ini adalah sebagai berikut:
1. Mobile robot yang dibuat menggunakan tipe penggerak diferensial.
2. Pergerakan robot mengabaikan massa, percepatan, gaya, gesekan, karena robot mobil yang dibuat berukuran kecil.
3. Mikrokontroler yang digunakan adalah mikrokontroler AVR ATmega8535.
4. Sensor jarak yang digunakan adalah jenis ultrasonik (PING)))TM.
5. Sensor ultrasonik dibuat hanya mampu untuk mendeteksi jarak 10 – 70 cm.
6. Ruang gerak robot bebas dari halangan sehingga robot dapat mempertahankan posisi dan orientasinya terhadap benda bergerak tanpa memperhatikan gangguan pada ruangan tersebut.
7. Hanya terdapat sebuah benda yang akan dijejak oleh robot.
8. Mobile robot yang dibuat hanya mengikuti/menjejak benda bergerak yang padat .
9. Kecepatan benda yang akan dijejak harus lebih kecil dari kecepatan maksimal robot. 10.Mobile robot hanya dapat dioperasikan bila
tidak terdapat sumber gelombang ultrasonik lain.
11.Pengendali yang digunakan adalah pengendali PD (Proposional-Derivative) dengan tuning parameter dilakukan secara empiris.
12.Pengendalian motor DC dilakukan dengan menggunakan PWM.
13.Bahasa pemrograman yang digunakan adalah dengan menggunakan bahasa C yang diadaptasikan pada software Code Vision AVR.
14.Tidak membahas mekanik robot. II. DASAR TEORI
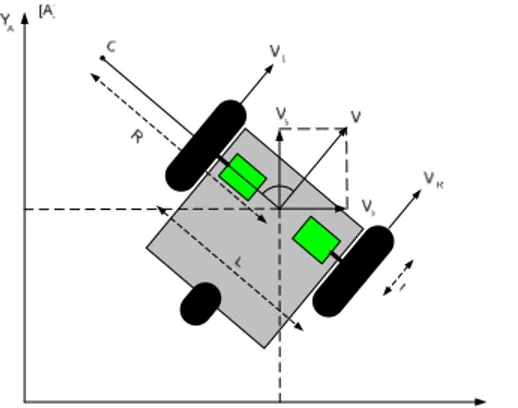
2.1 Kinematika MobileRobot Penggerak Differensial
Mobile robot tipe penggerak diferensial memiliki 2 buah roda penggerak yang terpisah (kanan dan kiri). Kedua roda ini digerakkan oleh motor DC yang ditempatkan pada satu sumbu secara terpisah. Sehingga kedua roda ini berfungsi sebagai penggerak sekaligus sebagai kemudi
mobile robot. Sehingga tingkat keluwesan robot dan kemampuan maneuver mobile robot tipe penggerak diferensial jauh lebih baik.
Gambar 2.1 Posisi dan Orientasi Mobile Robot dalam Sistem Koordinat Cartesian.
Secara matematis kecepatan linier dan kecepatan angular robot mobil dirumuskan sebagai berikut:
( )
( )
( )
( )
− = t V t V L L t t V L R 1 1 2 1 2 1ω
(2.1)Persamaan (2.1) diatas pada dasarnya memperlihatkan relasi kinematika langsung antara kecepatan linier roda-roda robot terhadap kecepatan linier dan angular robotnya, sedangkan Persamaan (2.2) berikut memperlihatkan relasi sebaliknya (Kinematika Balik).
( )
( )
( )
( )
− = t t V L L t V t V L Rω
2 1 2 1 (2.2)2.2 Pengendali PID (
Proposional-Integral-Derivative)
Pengendali PID adalah suatu sistem pengendali yang merupakan gabungan antara pengendali proporsional, integral, dan turunan (derivative). Dalam waktu kontinyu, sinyal keluaran pengendali PID dapat dirumuskan sebagai berikut.
( )
=( )
+∫
( )
+( )
t d i p dt t de K dt t e K t e K t u 0 . (2.3)Diagram blok pengendali PID dapat dilihat pada gambar 2.2. masukan + - s Ks K K d i p+ + U(s) E(s) Y(s)
Gambar 2.2 Diagram blok pengendali PID.
2.3 Sensor Jarak
Sensor yang digunakan adalah “PING)))™ Ultrasonic Range Finder”, buatan Parallax. Sensor ini digunakan untuk mengukur jarak antara mobile robot dengan benda yang diikuti. Sensor jarak ditunjukkan pada gambar 2.3.
Gambar 2.3 SensorPING)))TM Ultrasonic Range Finder.
1
Mahasiswa Jurusan Teknik Elektro UNDIP 2
Staf Pengajar Jurusan Teknik Elektro UNDIP Sensor jarak memiliki 3 buah terminal,
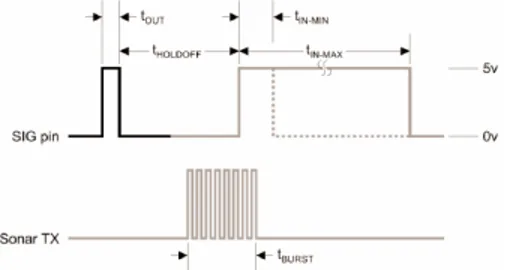
yaitu terminal tegangan catu 5 volt, terminal pentanahan, dan terminal sinyal yang dapat berfungsi sebagai masukan dan keluaran. Sensor jarak ini hanya memerlukan 1 buah pin pada mikrokontroler untuk dapat mengatur proses pengukuran jarak. Diagram pewaktuan sensor ditunjukkan pada gambar 2.4.
Gambar 2.4 Diagram pewaktuan sensor Ping)))TM. Agar sensor ini dapat digunakan untuk mengukur jarak dibutuhkan sebuah mikrokontroler untuk mengukur waktu tempuh sinyal ultrasonik dari sensor, memantul pada benda yang akan diukur, dan diterima kembali oleh sensor. Ilustrasi cara kerja sensor ditunjukkan pada Gambar 2.5.
Gambar 2.5 Ilustrasi cara kerja Ping)))TM. Besarnya jarak yang diukur dapat dihitung dengan menggunakan persamaan :
2 t . v s= (2.4) dengan :
s = jarak yang diukur ( meter ) v = kecepatan suara ( 344 m/detik) t = waktu tempuh (detik)
2.4 Mikrokontroler AVR ATmega8535 AVR (Alf and Vegard’s Risc Processor) merupakan seri mikrokontroller CMOS 8-bit buatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set Computer). Hampir semua instruksi dieksekusi dalam satu siklus clock, berbeda dengan instruksi MCS51 yang membutuhkan 12 siklus clock. AVR mempunyai 32 register serbaguna, Timer/Counter fleksibel dengan mode compare, interrupt internal dan eksternal, serial UART, programmable Watchdog Timer, dan mode power saving. Beberapa di antaranya mempunyai ADC dan PWM internal.
AVR juga mempunyai In-System Programmable Flash on-chip yang memungkinkan memori program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI.
Gambar 2.6 Konfigurasi pin-pin ATmega8535 Penjelasan dari masing-masing pin adalah sebagai berikut:
a. VCC merupakan pin yang berfungsi sebagai pin masukan catu daya.
b. GND merupakan pin ground.
c. PortA (PA7…PA0) merupakan terminal masukan analog menuju A/D Converter. Port
ini juga berfungsi sebagai portI/O 8 bit dua arah (bidirectional), jika A/D Converter tidak diaktifkan.
d. Port B (PB7…PB0) merupakan port I/O 8 bit dua arah (bidirectional) dengan resistor pull-up internal. Port B juga dapat berfungsi sebagai terminal khusus yaitu Timer/Counter, komparator analog, dan SPI.
e. Port C (PC7..PC0) merupakan port I/O 8 bit dua arah (bidirectional) dengan resistor pull-up internal. Port C juga dapat berfungsi sebagai terminal khusus yaitu komparator analog, dan Timer Oscilator.
f. Port D (PD7…PD0) adalah merupakan port I/O 8 bit dua arah (bidirectional) dengan resistor pull-up internal. Port D juga dapat berfungsi sebagai terminal khusus yaitu komparator analog, interupsi eksternal, dan komunikasi serial.
g. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler.
h. XTAL1 dan XTAL2 merupakan pin masukan
clock eksternal.
i. AVCC merupakan pin masukan tegangan untuk ADC.
j. AREF merupakan pin masukan tegangan referensi ADC.
III. PERANCANGAN 3.1 Perancangan Perangkat Keras
(Hardware)
Perangkat keras dari sistem yang akan dibangun meliputi sistem minimum mikrokontroler ATmega8535, sensor PING)))TM,
Keypad, LCD, driver motor DC, dan catu daya. Secara umum perancangan sistem yang akan dibuat dapat dilihat pada gambar 3.1.
Gambar 3.1 Blok diagram sistem
Pengalokasian penggunaan port-port yang ada pada mikrokontroler ATmega8535. Port A digunakan sebagai tampilan LCD. Port B pin 2 dan 3 digunakan sebagai masukan dan keluaran ke sensor PING)))TM . Port C berfungsi sebagai penerima masukan Keypad. Port D pin 4 dan 5 digunakan sebagai keluaran PWM yang berfungsi untuk mengatur pemberian tegangan ke motor DC kiri dan kanan, pin 2 dan 3 digunakan untuk memberikan masukan arah putar motor kiri, sedangkan pin 6 dan 7 digunakan untuk memberikan masukan arah putar motor kanan. 3.2 Perancangan Perangkat Lunak
(Software)
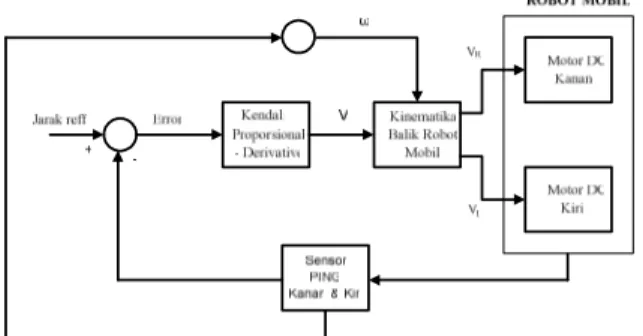
Robot yang dibuat pada Tugas Akhir ini adalah robot yang mempunyai tugas untuk mengikuti benda bergerak dari jarak referensi yang dikehendaki. Robot ini dikendalikan dengan menggunakan pengendali PD (Proportional– Derivative). Untuk mempertahankan posisi sesuai dengan referensi, diberikan masukan pengendali berupa error posisi yang didapat dari selisih antara referensi yang diinginkan dengan jarak yang diperoleh dari pembacaan sensor. Sedangkan untuk melakukan maneuver diberikan masukan
ω
yang didapat dari selisih antara jarak yang diperoleh dari pembacaan sensor kanan dan kiri. Sinyal kontrol yang diperoleh digunakan untuk mengatur kecepatan linear. Blok diagram pengendalian secara umum dapat dilihat pada gambar 3.6 berikut.Gambar 3.2 Blok Diagram Pengendalian. Perancangan perangkat lunak pada mobile robot ini meliputi mengatur kerja sistem seperti pemindai masukan (keypad), mengatur tampilan, pembacaan hasil sensor, pengaturan PWM oleh
Timer1, serta pengaturan aksi-aksi yang harus dilakukan oleh robot. Diagram alir pengendalian robot penjejak benda bergerak adalah sebagai berikut.
Gambar 3.3 Diagram alir pengendalian robot penjejak benda bergerak.
IV. PENGUJIAN DAN ANALISA 4.1 Pengujian Perangkat Keras
4.1.1 Pengujian Driver Motor DC
Driver motor yang digunakan adalah IC L293D, driver L293D ini mendapat masukan dari PWM yang dihasilkan oleh timer 1 mikrokontroler AVR. Hasil pengujian driver
motor DC L293D dapat dilihat pada tabel 4.1 berikut.
1
Mahasiswa Jurusan Teknik Elektro UNDIP 2
Staf Pengajar Jurusan Teknik Elektro UNDIP Pengujian driver motor DC menggunakan
tegangan 9 V. Dari tabel 4.1 di atas terlihat bahwa semakin besar nilai OCR1AL dan OCR1BL yang diberikan maka akan semakin besar tegangan yang dihasilkan.
4.1.2 Pengujian Sensor PING)))TM
Pengujian terhadap sensor PING dilakukan dengan mengukur jarak suatu benda terukur yang diletakkan di hadapan sensor, pembacaan sensor dibatasi pada jarak 10 cm – 70 cm. Data hasil pengukuran yang dilakukan adalah sebagai berikut.
Tabel 4.2 Hasil pengukuran jarak dengan menggunakan PING™.
Dari Tabel 4.2 tersebut diatas terlihat bahwa sensor PING™ tidak proposional dengan jarak sesungguhnya, hal ini dapat disebabkan karena pengukuran serta isi ulang timer yang tidak tepat (ada pembulatan).
4.2 Pengujian Perangkat Lunak (Software) 4.2.1 Pengujian Timer 1 sebagai PWM
Pengujian PWM dilakukan dengan memasukkan nilai PWM tertentu dan menghitung
duty cycle-nya. Berikut adalah beberapa screen shoot pada osiloskop guna memperlihatkan pengaruh perubahan data pada register OCR1AL dan OCR1BL terhadap lebar duty cycle.
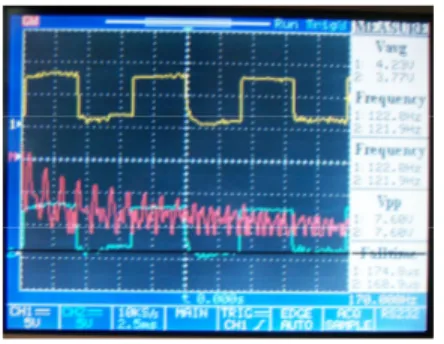
Gambar 4.1 Sinyal PWM pada keluaran driver motor DC dengan OCR1AL dan OCR1BL=100. Pengaturan time / div dan volt / div adalah sebagai berikut:
T / div : 2,5 ms V / div : 5 volt
Dengan demikian frekuensi dan amplitude sinyal PWM dapat dihitung sebagai berikut:
• Pada keluaran driver, sinyal PWM memiliki frekuensi: ms T ms T 8 5 , 2 * 2 , 3 = =
Dan frekuensinya dapat dihitung sebagai berikut:
• Amplitude sinyal PWM adalah: Amplitude tegangan pada sinyal PWM tersebut adalah : volt A volt A 8 5 * 6 , 1 = =
Berdasarkan gambar 4.1 untuk nilai sinyal PWM OCR1AL dan OCR1BL 100 maka tegangan yang dikeluarkan adalah sebagai berikut
volt V V out out 4 , 3 8 , 8 * 255 100 = =
Dari hasil perhitungan dan pengukuran terdapat sedikit perbedaan, hal ini disebabkan karena kesalahan pengamatan. Berikut adalah beberapa variasi untuk nilai OCR1AL dan OCR1BL yang berbeda.
Gambar 4.2 Sinyal PWM keluaran driver motor DC dengan nilai OCR1AL dan OCR1BL=125. Jarak Terdeteksi PING™
(cm) No. Jarak Terukur
(cm) Kanan Kiri 1 10 10,45 10,45 2 20 19,81 20,36 3 30 30,27 30,27 4 40 40,28 40,28 5 50 50,74 50,74 6 60 60,54 60,54 7 70 70,06 70,06 Hz f f ms f T f 125 8 1000 8 1 1 = = = =
Gambar 4.3 Sinyal PWM keluaran driver motor DC dengan nilai OCR1AL dan OCR1BL=150.
Gambar 4.4 Sinyal PWM keluaran driver motor DC dengan nilai OCR1AL dan OCR1BL=175. 4.2.2 Pengujian Algoritma PD (
Proposional-Derivative)
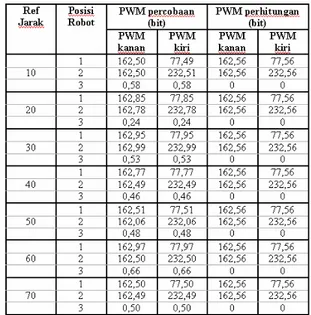
Pengujian algoritma PD dilakukan dengan mengoperasikan mobile robot namun dengan menghilangkan catu daya pada motor DC. Dengan demikian robot tetap akan berada di tempat. Kemudian dengan membaca tampilan nilai-nilai pada LCD, penulis dapat mengetahui nilai PWM kanan dan kiri mobile robot.
Pada pengujian robot ditempatkan pada 3 macam posisi, yaitu [1] Robot berada pada posisi jauh dari jarak referensi (referensi+5), [2] Robot berada pada posisi dekat dengan benda yang diikuti (referensi-5), [3] Robot berada pada jarak referensi. Pengujian untuk ketiga posisi tersebut dilakukan dengan mengambil data yang ditampilkan dan membandingkannya dengan hasil perhitungan manual. BENDA JARAK REFERENSI 1 2 3
Gambar 4.5 Tiga kemungkinan penempatan mobile
robot terhadap benda.
Pada pengujian ini menggunakan nilai Kp=1 dan nilai Kd=0,55. Kemudian meletakkan
mobile robot pada variasi posisi seperti gambar
diatas dan dengan memberikan variasi referensi jarak. Dari hasil percobaan dan perhitungan diperoleh data sebagai berikut.
Tabel 4.3 Hasil pengujian algoritma proposional –
derivative.
Contoh perhitungan nilai PWM untuk nilai kp=1, kd=0,55 dan jarak referensi 10 cm serta untuk posisi robot 1.
56 , 77 85 ) 5 / 255 * 1875 , 3 ( 85 ) 5 / 255 * _ ( _ 56 , 162 5 / 255 * 1875 , 3 5 / 255 * _ _ 1875 , 3 ) 1 ( * 255 * 400 / 5 ) 1 ( * 255 * 400 / _ 1875 , 3 ) 1 ( * 255 * 400 / 5 ) 1 ( * 255 * 400 / _ 5 ) 0 * 5 , 7 ( 5 * tan 5 ) 0 * 5 , 7 ( 5 * tan 0 15 15 _ _ 5 ) 5 ( * 1 * 5 2 / )) 5 ( 5 ( 2 / ) _ _ ( 5 15 10 _ _ 5 15 10 _ _ = − = − = = = = = − − = − = = − − = − = − = + − = + = − = + − = + = = − = − = − = − = = − = − + − = + = − = − = − = − = − = − = set vL kanan pwm set vL kanan pwm vR set vR vL set vL t kons v vL t kons v vR R jarak L jarak error Kp v R error L error error R jarak reff R error L jarak reff L error ω ω ω
4.3 Pengujian Mobile Robot dalam Menjejak Benda Bergerak
4.3.1 Posisi dan Orientasi Akhir Robot Dalam pengujian ini akan dibandingkan posisi dan orientasi akhir robot terhadap objek yang dijejak. Posisi robot dapat diketahui dengan melihat jarak tiap-tiap sensor terhadap objek yang dijejak, yang hasil pengukuran jarak tersebut ditampilkan di LCD, sedangkan orientasi robot dapat dibandingkan terhadap orientasi benda yang dijejak dengan melihat error jarak tiap-tiap sensor. Jika error jarak tiap-tiap sensor terhadap objek relatif kecil, maka dapat dikatakan bahwa orientasi robot sama dengan orientasi objek. Hasil pengujian dapat dilihat pada tabel 4.4 berikut.
1
Mahasiswa Jurusan Teknik Elektro UNDIP 2
Staf Pengajar Jurusan Teknik Elektro UNDIP Tabel 4.4 Posisi dan Orientasi Robot Terhadap Objek
Dari tabel 4.4 di atas, didapatkan bahwa robot dapat mencapai posisi dan orientasi yang diinginkan. Adanya kesalahan pada keadaan tunak disebabkan karena kekurang telitian dalam pembacaan jarak oleh sensor.
4.3.2 Pengujian Kecepatan Maksimal Robot Pada pengujian kecepatan maksimal robot dapat dilakukan dengan memberikan sinyal kontrol maksimal. Karena mode PWM yang digunakan adalah mode PWM 8 bit, maka nilai sinyal kontrol maksimal yang dapat diberikan adalah 255 sehingga mikrokontroler akan memberikan pulsa dengan duty cycle 100%.
Gambar 4.6 Pengujian Kecepatan Maksimal Robot. Dari hasil pengujian kecepatan maksimal robot, didapatkan hasil bahwa robot memiliki kecepatan maksimal sebesar 41 Rpm. Oleh karena itu, robot akan tetap dapat menjejak objek yang bergerak jika objek yang dijejak memiliki kecepatan kurang dari 41 Rpm.
V. PENUTUP 5.1 Kesimpulan
Berdasarkan hasil perancangan, analisis dan pengujian pada Tugas Akhir Rancang Bangun
Mobile Robot Penjejak Benda Bergerak Berbasis Pengendali PD (Proposional-Derivative) Menggunakan Mikrokontroler AVR ATmega8535 ini dapat ditarik kesimpulan sebagai berikut :
1. Sensor PING™ memberikan hasil pembacaan jarak dengan error yang kecil, yaitu antara -0,74 cm sampai 0,19 cm untuk daerah pendeteksian robot sehingga mobile robot dapat mencapai posisi dan orientasi yang diinginkan.
2. Kecepatan maksimal robot untuk menjejak benda adalah 41 Rpm.
3. Berdasarkan percobaan empiris nilai konstanta proposional dan derivative yang baik untuk sistem ini adalah 1 dan 0,55.
5.2 Saran
Sebagai masukan guna pengembangan lebih lanjut dari Tugas Akhir ini, maka penulis memberikan beberapa saran sebagai berikut :
1. Penambahan sensor jarak pada robot mobil ini akan memperluas range pendeteksian benda yang akan dijejak.
2. Robot mobile ini dapat dikembangkan dengan menambahkan transmitter pada benda yang akan dijejak dan receiver pada robot, sehingga sensor jarak yang ada pada robot dapat digunakan sebagai pendeteksi adanya rintangan.
3. Dapat digunakan dua mikrokontroler untuk tingkah laku robot yang lebih komplek, sehingga proses pengolahan sinyal kontrol dan fungsi-fungsi tambahan seperti pembacaan jarak maupun pengaturan nilai PWM dapat dilakukan secara terpisah.
DAFTAR PUSTAKA
[1] Budiharto, Widodo, Membuat Robot Cerdas, Penerbit Elex Media Komputindo, Jakarta, 2006.
[2] Craig, John J., Introduction to Robotics Mechanism and Control, Addison-Wesley, 1986.
[3] Hartono, Jogiyanto, Konsep Dasar Pemrograman Bahasa C, Penerbit Andi, Yogyakarta, 1992.
[4] Lucas, GW, A Tutorial and Elementary Trajectory Model for the Differential Steering System of Robot Wheel Actuators,
2006.
[5] Ogata, Katsuhiko, Teknik Kontrol Automatik Jilid 1-2, Diterjemahkan Oleh Ir. Edi Leksono, Penerbit Erlangga, Jakarta, 1996.
[6] Pitowarno, Endra, Robotika Desain, Kontrol, dan Kecerdasan Buatan, Penerbit Andi Yogyakarta, 2006.
[7] Setiawan, Iwan, Trias A., Darjat, Rancang Bangun Sistem Kontrol Robot Mobil untuk Keperluan Navigasi Darat Berbasis Trayektori Bezier, Universitas Diponegoro, 2006.
[8] Sharon D, J Harstein, G Yantian, Robot dan Otomatisasi Industri, PT Elexmedia Komputindo Kelompok Gramedia, Jakarta 1992.
[9] Sulasno, Dasar Teknik Konversi Energi Listrik dan Sistem Pengaturan, Badan Penerbit Universitas Diponegoro, Semarang, 2003.
[10] Wardhana L, Belajar Sendiri Mikrokontroler AVR Seri ATMega8535 Simulasi, Hardware, dan Aplikasi, Penerbit Andi, Yogyakarta, 2006.
[11] Xiao, John, Robot Sensing and Sensors,
City College of New York, http://www-ee.ccny.cuny.edu/www/web/jxiao/sensor.pd f
[12] Xiao, John, Kinematics of Robot Manipulator, City College of New York,
http://www-ee.ccny.cuny.edu/www/web/jxiao/kinematic s.pdf
[13] ---, ATmega8535 Data Sheet,
http://www.atmel.com.
[14] ---, L293D Data Sheet,
http://www.ti.com.
[15] ---, Liquid Crystal Display Module M1632 : User Manual, Seiko Instrument Inc., Japan, 1987.
[16] ---, PING)))™ Ultrasonic Distance
Sensor Data Sheet,
http://www.parallax.com.
Endang Dwi Hartanti (L2F 003 496)
Lahir di Pemalang. Saat ini sedang melanjutkan studi pendidikan strata I di Jurusan Teknik Elektro, Fakultas Teknik Universitas Diponegoro Konsentrasi Kontrol.
Mengetahui dan mengesahkan, Dosen Pembimbing I Iwan Setiawan, ST, MT NIP. 132 283 183 Tanggal:____________ Dosen Pembimbing II Sumardi, ST, MT NIP. 132 125 670 Tanggal: ___________