Seminar Nasional Fortei Regional 7
SinarFe7-3 302
Rancang Bangun Sistem Pemberian Pakan Ikan Otomatis Pada
Akuarium Berbasis Arduino Uno
1
Bernado Da Costa Ximenes_1,
2Syahri Muharom_2
1 Teknik Elektro, Institut Teknologi Adhi Tama Surabaya, Surabaya 2 Teknik Elektro, Institut Teknologi Adhi Tama Surabaya, Surabaya
1[email protected]_1, 2 [email protected]_2
Abstract – The feeding process can maximize fish to growth, but this time the feeding process is still done manually, not automatically, from it the researcher create automatically fish feeding system based on time. The system design is include Real Time Clock (RTC), Load Cell as feed weight, and Microcontroller as main system. The running system is based on RTC, while RTC read the time, and the feeding set is 06 and 12 AM, and 06 PM. The system will detected RTC time and the solenoid feed container 1 is open, and then the feed in container 2, in feed container 2 is has a load cell, load cell will read the feed weight, if the feed more then 2 grams, the solenoid feed container 1 is closed, and solenoid 2 in container will open for 5 second to provide fish feed. From the test result from 12 tests, the system have been 10 successes and 2 failures, this failures is influenced by RTC, where the RTC cannot display the current time. That’s why the system built has successful percentage of the feeding fish is 83%. The researcher hope the system can help in providing fish feed and can maximize the fish.
Keywords — RTC, Load Cell, Arduino, Aquarium, Feed, Fish. Abstrak—Proses pemberian pakan ikan yang teratur dapat memaksimalkan pertumbuhan ikan, pada saat ini kebanyakan proses pemberian pakan masih dilakukan secara manual, belum secara otmatis, dari latar belakang tersebutlah peneliti membuat sebuah sistem pemberi pakan ikan otmatis berdasrkan waktu. Perancangan sistem ini meliputi real time clock (RTC), load cell sebagai pembaca berat pakan, dan arduino uni sebagai pengendadli sistem. RTC akan membaca waktu dimana pemberian pakan di lakukan pada pukul 06.00, 12.00, dan 18.00, sistem akan mendeteksi waktu dari RTC, ketika pukul 06.00 selenoid tampungan pakan akan terbuka, menuju tampungan pakan yang terdapat load cell, load cell akan membaca berat, jika lebih dari 2 gram maka, solenoid tampungan pakan akan tertutup, dan solenoid tampungan pakan load cell akan terbuka selama 5 detik untuk memberikan pakan ikan, dari 12 pengujian yang telah dilakukan, terdapat 10 kali berhasil dan 2 kali mengalami kegegagalan, keggalan ini di pengaruhi oleh RTC yang tidak bisa menampilkan waktu saat ini. Oeh sebab itu sistem yang dibangun ini mempunyai prosentase keberhasilan sistem dalam memberi pakan ikan sebesar 83%. Peneliti berharap sisitem ini dapat membantu dalam pemeberian pakan ikan dan dapat memaksimalkan ikan dalam berkembang.
Kata Kunci—RTC, Load Cell, Arduino, Akuarium, Pakan, Ikan.
I. PENDAHULUAN
Pemberian pakan ikan merupakan hal yang penting dalam pembudidayaan ikan. secara umum pemberian pakan masih dilakukan secara manual yang berorientasi pada sumber daya manusia. Hal ini memeliki kekurangan yang juga berpengaruh terhadap pertubuhan ikan seperti, kesalahan penjadwalan dan tidak terkontrolnya takaran pakan yang diberikan. Pemeberian pakan ikan dilakukan sebanyak 2-3 kali dalam sehari dengan takaran dan waktu yang tepat [1]
Memelihara ikan adalah suatu hobi masyarakat yang sangat digemari dari dulu sampai sekarang. Karena kemudahannya dalam perawatannya yang membuat orang ingin memelihara ikan. Ikan yang dipilihara dalam akuarium harus di diperhatikan waktu pemberian pakan yang teratur dan terus menerus. Namun karena kesibukan atau kegiatan lain dari di luar dugaan. Pada suatu penangkaran ikan, pemberian pakan ikan adalah suatu kegiatan yang rutin dilakukan. Begitu juga dengan pengontrolan akuarium sebaiknya dilakukan secara rutin untuk pembuatan benih ikan yang baik. Pengonrol akuarium dilakukan untuk mengkondisikan lingkungan yang baik bagi pertumbuhan ikan.
Salah satu faktor yang mempengaruhi budidaya ikan adalah pembrian pakan. Pemberian pakan yang baik adalah dilakukan secara teratur dan rutin sesuai dengan penjadwalaan. Pakan yang diberikan terlalu sedikit akan menghasilkan pertumbuhan ikan optimal karena ikan kekurangan gizi. Sebaliknya pakan yang diberikan terlalu banyak maka akan dapat menyebabkan pencemaran dari sisa- sisa makanan yang terhubung. Dengan pemberian pakan yang cukup, maka masalah dapat dicegah.
Seringkali menjadi suatu masalah pada saat proses pemberian pakan ikan diakuarium. Kendala ketika seseorang harus bepergian jauh hingga memakan waktu yang lama sampai berhari-hari, pasti akan berpikir bagaimana dengan keadaan ikan-ikan yang dipilihara dan bagaimana cara agar bisa memberi pakan ikan-ikan tersebut dengan terus menerus atau terjadwal tampa harus menggangu aktivitas sehari-hari. Dengan kemajuan teknologi sekarang membantu memudahkan manusia khususnya dengan cara otomatisasi untuk pemberiaan pakan ikan [2].
Pembuatan sistem otomatis pemberian paka kan telah abnyak berkembang[3], proses pembacaan waktu menjadi salah satu yang dibutuhkan sistem untuk memberikan pakan ikan secara otomatis[4], penggunaan load cell sebagai pendeteksi berat benda telah banyak digunakan untuk
SinarFe7 -2 303 mendeteksi berat benda[5], mikrokontroler sebagai otak untuk
memproses segala sistem banyak digunakan pada bidang bidang otmatis, seperti penjadwalan penyiraman tanaman[6], pengaturan suhu[7], dan lain lain.
Dari permasalahan tersebut maka dibutuhkan suatu alat yang dapat memberi pakan ikan secara otomatis pada waktu yang telah ditentukan yaitu dengan mengatur waktu pemberian pakan sesuai dengan jadwal yang diinginkan pengguna tersebut tidak perlu khwatir lupa atau harus ada pada saat memberi pakan ikan peliharanya. maka penulis memberikan solusi dengan merancang alat dengan judul Rancang Bangun Sistem Pemebrian Pakan
Ikan Otomatis Pada Akuarium Berbasis Arduino Uno.
II. METODE PENELITIAN
Pada bab ini menjelaskan semua tahapan proses kerja yang akan dilakukan pada penilitian ini, proses tahapan kerja mencakup perancangan dan pembuatan perangkat keras
(Hardwere) maupun perangkat lunak (Software). Berikut
diagram alir tentang tahapan kerja yang dilakukan.
A. Perancangan Mekanik
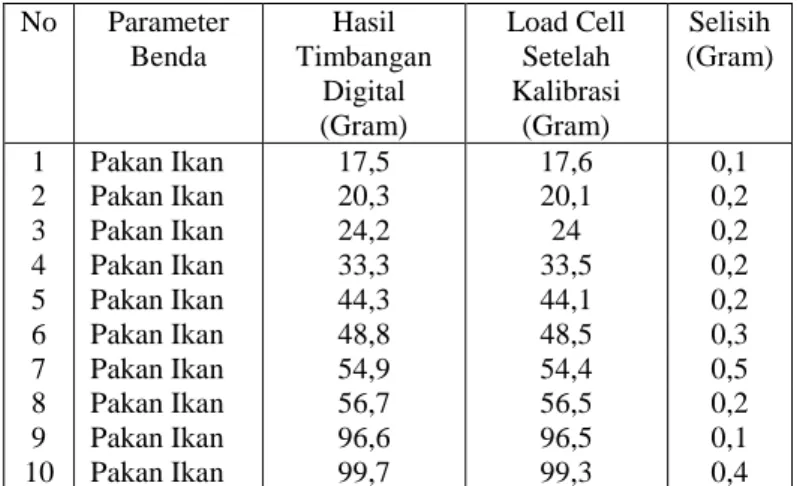
Peracangan mekanik dengan ukuranranya yaitu tinggi 20 cm, panjang 70 cm dan lebar 30 cm. Pada disain mekanik di atas terdapat penampungan pakan ikan, yang nantinya akan di rancang sedemikian rupa, sehingga nantinya sistem akan memberikan pakan ikan secara otomatis. Pada aquarium nantinya akan diberi ikan sebagai objeknya, ikan yang ada pada aquarium adalah jenis ikan hias koi. Gambar 1 adalah disain mekanik akuarium.
Gambar 1. Gambar Rancangan Mekanik Akuarium
B. Perancangan Hardware
Pada perencanaan hardware yang direncanakan terdapat beberapa komponen yang diperlukan untuk merancang sisitem. arduino adalah sebagai otak dari sistem yang akan mengolah semua data yang di perlukan oleh sistem. RTC adalah
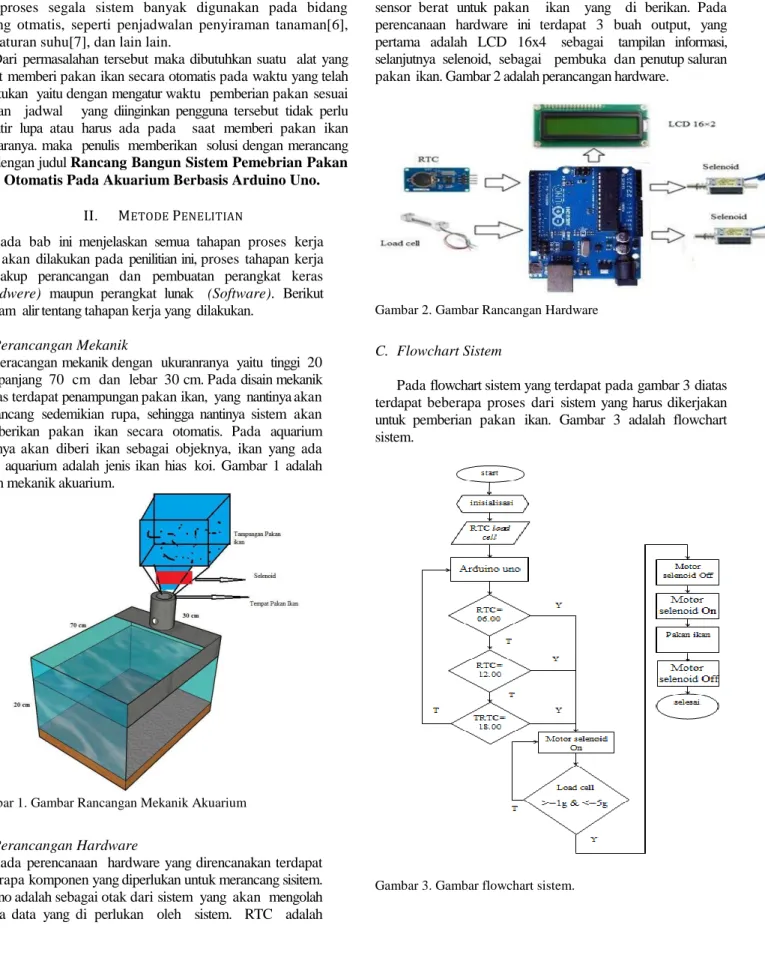
sebagai pewaktu pada sistem, Load Cell adalah sebagai sensor berat untuk pakan ikan yang di berikan. Pada perencanaan hardware ini terdapat 3 buah output, yang pertama adalah LCD 16x4 sebagai tampilan informasi, selanjutnya selenoid, sebagai pembuka dan penutup saluran pakan ikan. Gambar 2 adalah perancangan hardware.
Gambar 2. Gambar Rancangan Hardware
C. Flowchart Sistem
Pada flowchart sistem yang terdapat pada gambar 3 diatas terdapat beberapa proses dari sistem yang harus dikerjakan untuk pemberian pakan ikan. Gambar 3 adalah flowchart sistem.
SinarFe7 -2 304 Proses awal adalah inisialisasi dimana proses ini
merupakan persiapan keseluruhan sistem. Proses selanjutnya adalah input, dimana pada input ini terdapat RTC sebagai pewaktu, dan Load Cell sebagai sensor berat. Proses selanjutnya adalah pengecekan waktu pemberian pakan ikan, pada sistem yang dirancang ini pemberian pakan ikan dilakukan selama 3 kali dalam sehari, pada pukul 06.00 pagi, 12.00 siang dan 18.00 malam. RTC akan membaca waktu sebenarnya, ketika waktu menunjukkan pukul 06.00 pagi, selenoid akan bekerja untuk membuka saluran pakan ikan, selanjutnya pakan ikan akan di tampung di dalam tempat yang telah di sediakan dan dipasang sensor load cell, ketika load cell membaca berat dari pakan ikan seberat >=1g & <=5g, maka sistem akan memerintahkan motor selenoid untuk menutup saluran pakan ikan. Setelah saluran pakan ikan menutup, pakan ikan yang berada pada tampungan akan diberikan ke aquarium dengan mengontrol motor untuk membuka kran pemberian pakan ikan. Pada pukul 12.00 dan 18.00 akan dilakukan proses yang sama.
III. HASIL DAN PEMBAHASAN
Pada bagian ini akan dibahas hasil dari penelitian yang telah dilakukan.
A. Kalibrasi Load Cell
Kalibrasi load cell dilakukan untuk mendapatkan nilai yang paling kecil dari selisih antara timbangan digital yang sudah ada dengan hasil pembacaan pada load cell, pada table 1 adalah hasil dari pembacaan load cell sebelum dan sesudah kalibrassi.
Tabel 1. Data Load Cell Sebelum Kalibrasi No Parameter Benda Hasil Timbangan Digital (Gram) Load Cell Sebelum Kalibrasi (Gram) Selisih (Gram) 1 Pakan Ikan 17,5 0,82 16,68 2 Pakan Ikan 20,3 0,97 19,33 3 Pakan Ikan 24,2 1,21 22,99 4 Pakan Ikan 33,3 1,70 31,6 5 Pakan Ikan 44,3 2,35 41,95 6 Pakan Ikan 48,8 2,82 44,38 7 Pakan Ikan 54,9 2,94 51,96 8 Pakan Ikan 56,7 3,46 53,24 9 Pakan Ikan 96,6 5,50 91,1 10 Pakan Ikan 99,7 5,50 94,2
Dari hasil yang telah didapatkan dari proses pembacaan load cell sebelum kalibrasi, dapat dilihat pada table 1, selisih antara timbangan digital dan load cell sangat besar antara 16 sampai dengan 94 gram, dari itu proses kalibrasi dilakukan untuk mendapatkan pembacaan nilai load cell yang lebih baik. Table 2 adalah hasil setelah dilakukan kalibrasi pada load cell.
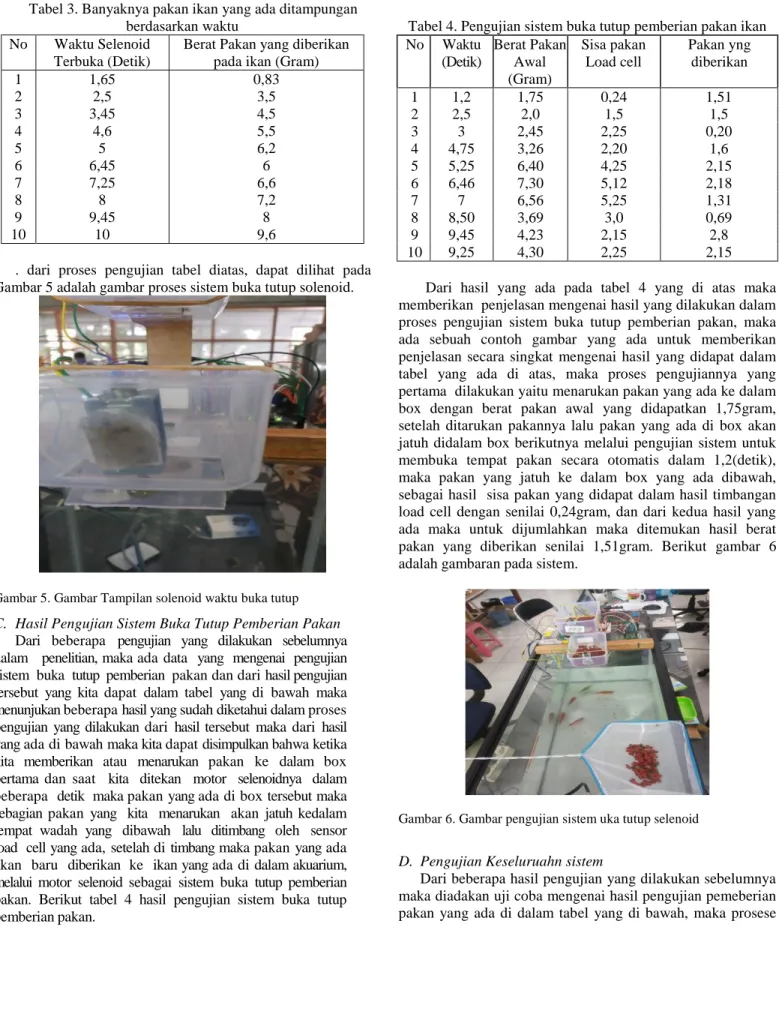
Tabel 2. Data Load Cell Setelah Kalibrasi No Parameter Benda Hasil Timbangan Digital (Gram) Load Cell Setelah Kalibrasi (Gram) Selisih (Gram) 1 Pakan Ikan 17,5 17,6 0,1 2 Pakan Ikan 20,3 20,1 0,2 3 Pakan Ikan 24,2 24 0,2 4 Pakan Ikan 33,3 33,5 0,2 5 Pakan Ikan 44,3 44,1 0,2 6 Pakan Ikan 48,8 48,5 0,3 7 Pakan Ikan 54,9 54,4 0,5 8 Pakan Ikan 56,7 56,5 0,2 9 Pakan Ikan 96,6 96,5 0,1 10 Pakan Ikan 99,7 99,3 0,4
Dari hasil yang telah didapatkan dari proses pembacaan load cell setelah kalibrasi, dapat dilihat pada table 2, selisih antara timbangan digital dan load cell antara 0,1 sampai dengan 0,5. Dari hasil ini load cell telah sesuai dengan yang diinginkan karena mempunyai selisih yang kecil terhadap timbangan digital. Berikut gambar 4 tampilan LCD pada saat kalibrasi load cell.
Gambar 4. Gambar Tampilan LCD pada saat Kalibrasi.
B. Pengujian Sistem Buka Tutup Penampungan Pakan
Pengujian ini dilakukan untuk mengetahui berapa berat pakan ikan yang diberikan ke ikan berdasarkan waktu buka pada selonoid, Dari hasil pengujian yang telah dilakukan, didapatkan hasil bahwa semakin lama waktu solenoid terbuka, maka semakin banyak pakan ikan yang diberikan table 3 adalah hasil pengujian yang dilakukan pada sistem ini.
SinarFe7 -2 305 Tabel 3. Banyaknya pakan ikan yang ada ditampungan
berdasarkan waktu No Waktu Selenoid
Terbuka (Detik)
Berat Pakan yang diberikan pada ikan (Gram)
1 1,65 0,83 2 2,5 3,5 3 3,45 4,5 4 4,6 5,5 5 5 6,2 6 6,45 6 7 7,25 6,6 8 8 7,2 9 9,45 8 10 10 9,6
. dari proses pengujian tabel diatas, dapat dilihat pada Gambar 5 adalah gambar proses sistem buka tutup solenoid.
Gambar 5. Gambar Tampilan solenoid waktu buka tutup
C. Hasil Pengujian Sistem Buka Tutup Pemberian Pakan
Dari beberapa pengujian yang dilakukan sebelumnya dalam penelitian, maka ada data yang mengenai pengujian sistem buka tutup pemberian pakan dan dari hasil pengujian tersebut yang kita dapat dalam tabel yang di bawah maka menunjukan beberapa hasil yang sudah diketahui dalam proses pengujian yang dilakukan dari hasil tersebut maka dari hasil yang ada di bawah maka kita dapat disimpulkan bahwa ketika kita memberikan atau menarukan pakan ke dalam box pertama dan saat kita ditekan motor selenoidnya dalam beberapa detik maka pakan yang ada di box tersebut maka sebagian pakan yang kita menarukan akan jatuh kedalam tempat wadah yang dibawah lalu ditimbang oleh sensor load cell yang ada, setelah di timbang maka pakan yang ada akan baru diberikan ke ikan yang ada di dalam akuarium, melalui motor selenoid sebagai sistem buka tutup pemberian pakan. Berikut tabel 4 hasil pengujian sistem buka tutup pemberian pakan.
Tabel 4. Pengujian sistem buka tutup pemberian pakan ikan No Waktu (Detik) Berat Pakan Awal (Gram) Sisa pakan Load cell Pakan yng diberikan 1 1,2 1,75 0,24 1,51 2 2,5 2,0 1,5 1,5 3 3 2,45 2,25 0,20 4 4,75 3,26 2,20 1,6 5 5,25 6,40 4,25 2,15 6 6,46 7,30 5,12 2,18 7 7 6,56 5,25 1,31 8 8,50 3,69 3,0 0,69 9 9,45 4,23 2,15 2,8 10 9,25 4,30 2,25 2,15
Dari hasil yang ada pada tabel 4 yang di atas maka memberikan penjelasan mengenai hasil yang dilakukan dalam proses pengujian sistem buka tutup pemberian pakan, maka ada sebuah contoh gambar yang ada untuk memberikan penjelasan secara singkat mengenai hasil yang didapat dalam tabel yang ada di atas, maka proses pengujiannya yang pertama dilakukan yaitu menarukan pakan yang ada ke dalam box dengan berat pakan awal yang didapatkan 1,75gram, setelah ditarukan pakannya lalu pakan yang ada di box akan jatuh didalam box berikutnya melalui pengujian sistem untuk membuka tempat pakan secara otomatis dalam 1,2(detik), maka pakan yang jatuh ke dalam box yang ada dibawah, sebagai hasil sisa pakan yang didapat dalam hasil timbangan load cell dengan senilai 0,24gram, dan dari kedua hasil yang ada maka untuk dijumlahkan maka ditemukan hasil berat pakan yang diberikan senilai 1,51gram. Berikut gambar 6 adalah gambaran pada sistem.
Gambar 6. Gambar pengujian sistem uka tutup selenoid
D. Pengujian Keseluruahn sistem
Dari beberapa hasil pengujian yang dilakukan sebelumnya maka diadakan uji coba mengenai hasil pengujian pemeberian pakan yang ada di dalam tabel yang di bawah, maka prosese
SinarFe7 -2 306 uji coba hasil yang didapatkan dalam tabel yang dibawah
sebagai berikut. Target pakan awal yang kita butuh yang ada beberapa gram di dalam hasil yang ada di tabel dibawah yang ada di kolom kedua.
Target berat pakan ini sebelum diberikan pakan kepada ikan tersebut ke dalam akurium maka proses awal yang dilakukan, saat motor selenoid satu di buka dalam beberapa detik, maka pakan ikan yang ada di dalam box pertama yang ada di atas akan jatuh ke box yamg kedua diwah, maka sisa pakan yang ada di box kedua sebelum memberikan ke dalam akuarium harus di timbang dari sensor load cell baru menggetahui nilai yang di timbang dari load cell maka hasil sisa pakan itu akan diberikan dalam akuarium, maka proses pembukaan pada tempat pakan itu akan dibuka dalam 5 detik, untuk proses buka tempat pakan sendiri melalui motor selenoid yang kedua yang di box dibawah maka tempat pakan tersebut dibuka maka sisa pakan ikan yang ada akan dituan ke dalam akuarium. Tabel 5 adalah pengujian keseluruha sistem.
Tabel 5. Hasil Pengujian Keseluruhan Sistem
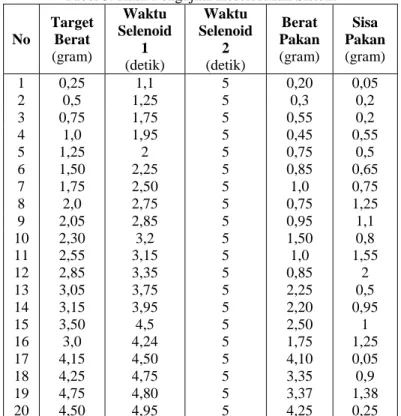
No Target Berat (gram) Waktu Selenoid 1 (detik) Waktu Selenoid 2 (detik) Berat Pakan (gram) Sisa Pakan (gram) 1 0,25 1,1 5 0,20 0,05 2 0,5 1,25 5 0,3 0,2 3 0,75 1,75 5 0,55 0,2 4 1,0 1,95 5 0,45 0,55 5 1,25 2 5 0,75 0,5 6 1,50 2,25 5 0,85 0,65 7 1,75 2,50 5 1,0 0,75 8 2,0 2,75 5 0,75 1,25 9 2,05 2,85 5 0,95 1,1 10 2,30 3,2 5 1,50 0,8 11 2,55 3,15 5 1,0 1,55 12 2,85 3,35 5 0,85 2 13 3,05 3,75 5 2,25 0,5 14 3,15 3,95 5 2,20 0,95 15 3,50 4,5 5 2,50 1 16 3,0 4,24 5 1,75 1,25 17 4,15 4,50 5 4,10 0,05 18 4,25 4,75 5 3,35 0,9 19 4,75 4,80 5 3,37 1,38 20 4,50 4,95 5 4,25 0,25
Dari penjelasan diatas yang membuat tentang hasil pengujian keseluruan sistem pemberian pakan, maka ada beberapa contoh hasil gambar yang ada pada pengujian sistem itu, sebelum memberikan sebuah contoh, yang pertama harus mengetahui progres yang dibuat dalam alat itu sendiri apakah hasil yang diuji saat kita melakuakan sesuai dengan hasil yang kita targetkan atau tidak di sesuaikan, maka dari beeberapa hasil pengujian dilihat dari tabel yang di atas itu ada juga hasil yang tidak sesuaikan seperti contoh hasil yang di colom yang
terakhir tentang hasil sisa pakan maka disimpulkan target pakan yang kita berikan ke tempat wadah yang ada saat motor selenoid satunya dibuka beberapa detik, maka pakan yang kita berikan yang ada sebagian pakan yang nanti jatuhkan ke wadah satu yang di bawah untuk di timbang maka setelah di timbang sisa pakan yang ada akan diberikan ke dalam akuarium.
Proses pemberian itu yaitu setelah motor dua dibuka dalam lima detik maka sisa pakan akan jatuh ke dalam akuarium maka dari hasil yang ada dapat disimpulkan pada saat pakan ikan kita berikan dalam target kita kurang maksimal untuk memberikan pakan itu ke dalam akurium, karena mempengarui dari tempat pakan yang di buat maka dari sini hasil yang kita targetkan tidak sesuaikan. Berikut gambar 7 hasil pengujian keseluruan sistem.
Gambar 7. Gambar pengujian keseluruhan sistem
E. Pengujian sistem berdasarkan hari dengan RTC
Jadwal untuk pemberian pakan untuk hari senin terbagi menjadi empat tahap, setelah kita sudah tau waktu untuk pemberian pakan maka kita juga harus tau bagaimana proses awalnya untuk pemberian pakan, yang pertama waktu yang kita memberikan pakan, mulai dari jam 06.00 berat pakan yang kita targetkan untuk memberikan pakan 2g pada tempat wadah yang ada lalu dalam beberapa detik motor selenoid dibuka maka pakan yang kita berikan sebagiannya akan jatuh ke wadah yang di bawah setelah memberikan sisa pakan ke dalam akuarium maka load cell ditimbang maka dapatnya 2,2 gram.
Selesai ditimbang maka sebagian dari pakan yang ditimbang oleh load cell, maka pakan tersebut akan diberikan ke dalam akuarium senilai 1,7g, maka sisa pakan yang ada dibox yang kedua masih ada 0,5g maka dari proses pemberian pakan yang diuji menujukan bawah pemberian untuk jadwal hari senin jam 06.00 berhasil saat melakukan pengujian. Tabel 6 adalah hasil pengujian pemberian pakan per hari.
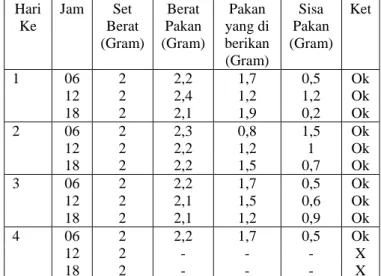
SinarFe7 -2 307 Tabel 6. Hasil Pengujian Sistem berdasarkan hari
Hari Ke Jam Set Berat (Gram) Berat Pakan (Gram) Pakan yang di berikan (Gram) Sisa Pakan (Gram) Ket 1 06 2 2,2 1,7 0,5 Ok 12 2 2,4 1,2 1,2 Ok 18 2 2,1 1,9 0,2 Ok 2 06 2 2,3 0,8 1,5 Ok 12 2 2,2 1,2 1 Ok 18 2 2,2 1,5 0,7 Ok 3 06 2 2,2 1,7 0,5 Ok 12 2 2,1 1,5 0,6 Ok 18 2 2,1 1,2 0,9 Ok 4 06 2 2,2 1,7 0,5 Ok 12 2 - - - X 18 2 - - - X
Dari beberapa percobaan yang dilakukan mengenai hasil pengujian sistem pemberian pakan berdasarkan hari, beberpa hari yang ada di tabel yang di atas maka dianalisakan bahwa dalam percobaan yang dilakukan ada 4 hari dan 12 kali percobaan, dalam 12 kali percobaan yang dilakukan maka menghasilkan 10 percobaan yang berhsil dan 2 percoban yang gagal, maka dari 10 kali percobaan yang berhasil maka dapat nilai persentase yang ada senilai 83 % dalam 10 kali percobaan yang dilakukan, 2 kali error terjadi dikarenakan RTC tidak dapat membaca waktu sehingga proses pemberian pakan ikan terhenti. Berikut gambar 8 adalah gambaran kerja sistem.
Gambar 8. Gambar pengujian sistem pada hari ke 1
IV. KESIMPULAN
Dari pembuatan sistem pemberi pakan ikan pada aquarium ini, didapatkan kesimpulan bahwa pengujian pembacaan lad cell memiliki range selisih yang cukup rendah yaitu diantara 0,1 sampai dengan 0,5 gram. Sedangkan untuk pengujian sistem buka tutup solenoid tampungan pakan ikan, terdapat sisa pakan ikan yang masih ada di tampungan, hal ini disebabkan oleh disain mekanik yang telah dibuat. Pengujian keseluruhan sistem pemberian pakan ikan mendapatkan tingkat keberhasilan sebesar 83%, dari 12 kali pengujian di daptkann 10 kali berhasil dan 2 kali gagal.
V. DAFTAR PUSTAKA
[1] V. Yanuar, “PENGARUH PEMBERIAN JENIS PAKAN YANG BERBEDA TERHADAP LAJU
PERTUMBUHAN BENIH IKAN NILA
(Oreochiomis niloticus) DAN KUALITAS AIR DI AKUARIUM PEMELIHARAAN,” Ziraa’ah Maj.
Ilm. Pertan., vol. 42, no. 2, pp. 91–99, 2017.
[2] K. Penyediaan and I. Bagi, “Budidaya ikan air tawar ramah lingkungan untuk mendukung keberlanjutan penyediaan ikan bagi masyarakat,” no. April, 2018. [3] S. Muhammad, A. Muid, and D. Triyanto,
“RANCANG BANGUN SISTEM PEMBERI
PAKAN IKAN DAN PENGUKUR pH AIR PADA KERAMBA BERBASIS WEBSITE,” J. Coding, Sist.
Komput. Untan, vol. 04, no. 02, pp. 161–172, 2016
[4] Y. Divayana, P. Studi, T. Elektro, F. Teknik, and U. Udayana, “Penggantian Air Pada Akuarium Berbasis Mikrokontroler Atmega328P,” vol. 6, no. 2, pp. 72– 77, 2019.
[5] P. Manggala Aditnya, P. Basrah Ali "Alat Pemberi Pakan Ikan Otomatis" JTEV, vol. 06, no. 02, pp. 113-121.2020.
[6] M. syahri, S. Heru, S. Surya Adi, "Rancang Bangun sistem penyiram tanaman bawang merah secara otomatis", SNTEKPAN, vol. 01, issue 01, pp 385-390. 2019.
[7] A. surya, K. Antonius Ari, S. Titiek, M. syahri, "Pengaturan tingkat suhu dan kelembaban pada mesin penetas telur burung puyuh", Sinarfe7, vol. 02, issue 01. pp 459-463. 2019.