BAB 2
TINJAUAN PUSTAKA
Pada bab 2 ini akan dilakukan beberapa tinjauan pustaka dari beberapa hasil peneltian sebelumnya yang telah dipublikasikan. Tinjauan pustaka ini bertujuan untuk melihat sejauh mana Parking Guidance System (PGS) dalam kurun waktu kurang lebih 5 tahun terakhir berkembang. Hasil tinjauan pustaka ini akan digunakan sebagai pembanding dengan sistem parkir yang akan dirancang dalam penelitian ini. Tinjauan pustaka ini dibagi menjadi 4 bagian: Arsitektur Parking Guidance System (PGS), pengaplikasian RS485 dan perbedaannya dengan RS232, implementasi FreeRTOS, dan pengaplikasian sensor ultrasonik HC-SR04. Setiap tinjauan pustaka terdiri dari metodologi penelitian dan hasil penelitian.
2.1. Arsitektur Parking Guidance System (PGS)
Sistem parkir yang digunakan dalam gedung – gedung parkir kini merupakan sistem parkir yang dapat memberikan informasi tempat parkir yang tersedia dengan menggunakan sensor jaringan dan memberitahukan informasi parkir secara langsung kepada pengendara. Menurut Wang, et al, sistem tersebut tidak dapat mengantarkan pengendara ke tujuan parkir yang diinginkan, bahkan dapat membuat situasi menjadi lebih parah, sehingga sistem tersebut sudah tidak pintar lagi (Wang & He, 2011). Sehingga untuk mengatasi permasalahan bahwa sistem parkir sekarang tidaklah “pintar”, maka dirancanglah berbagai sistem atau metode untuk menanggulangi permasalahan parkir bagi calon pengguna parkir agar bisa mendapatkan tempat parkir dengan mudah dan cepat.
Dikatakan bahwa setiap harinya ada sekitar 30% kendaraan bermobil di beberapa kota kesulitan mencari sebuah lokasi parkir dan menghabiskan waktu sekitar rata-rata 7.8 menit untuk mencari satu tempat parkir. Yang dimana tidak hanya menghabiskan waktu dan bensin untuk pengendara mencari parkir, tetapi juga dapat menyebabkan kemacetan (Gang & Cassandras, 2012).
2.1.1 Jenis-jenis sistem parkir
Menurut Hongwei Wang dan Wenbo He, selama beberapa dekade ini sudah terdapat berbagai jenis sistem parkir yang sudah dikembangkan dan umum digunakan pada gedung – gedung parkir (Wang & He, 2011), yaitu sebagai berikut:
a. Blind Search
Blind Searching merupakan strategi sederhana yang diaplikasikan oleh pengguna ketika tidak ada informasi parkir. Pengendara akan berhenti mencari hingga menemukan tempat yang kosong. Jika tidak, maka pengendara akan mencari lagi hingga menemukan tempat parkir yang kosong. b. Parking Information Sharing (PIS)
PIS merupakan sebuah mekanisme yang secara umum digunakan oleh sistem parkir kini. Setelah sistem parkir mengumumkan informasi mengenai tempat parkir yang tersedia kepada pengendara, tetapi karena jumlah tempat yang kosong sangat terbatas, maka akan ada banyak pengendara yang menginginkan lokasi parkir tersebut. Fenomena tersebut dinamakan “multiple-car-chasing-single-space”, dimana dapat menyebabkan kemacetan parah.
c. Buffered PIS (BPIS)
Untuk mengatasi permasalahan fenomena “multiple-car-chasing-single-space”, mereka dengan sengaja mengurangi jumlah tempat parkir yang kosong. Walaupun ada banyak pengendara yang menginginkan tempat parkir yang terbatas dan masih tersedia, sistem memiliki beberapa tempat tambahan untuk menghindari konflik. Kesulitan pada sistem ini adalah saat menentukan jumlah tempat buffer tersebut. Apabila terlalu kecil, masalah fenomena awal tidak akan hilang. Apabila terlalu besar, pemanfaatan tempat parkir akan rendah.
Dengan melihat ketiga sistem parkir, strategi PIS dan BPIS mengijinkan pengendara untuk memilih parkir sendiri dari informasi yang didapat, tetapi tidak dapat menghilangkan fenomena “multiple-car-chasing-single-space” secara sempurna. Oleh karena itu Wang, et al, menyarankan untuk menggunakan sistem reservasi, dimana pengendara membuat suatu reservasi melalui suatu sistem sehingga menjamin pengendara memiliki tempat parkir dan dapat memarkir kendaraannya dengan cepat (Wang & He, 2011).
Arsitektur sistem parkir yang dirancang oleh Hongwei Wang dan Wenbo He dibagi menjadi 3 bagian, yaitu pengguna parkir, tempat parkir, dan pengelola sistem.
Gambar 2.1. Arsitektur Sistem Parkir Pintar (Wang & He, 2011)
Sistem parkir yang dirancang menggunakan sistem reservasi dimana calon pengguna parkir dapat memilih tempat parkir yang ingin ditempati sebelum memasuki gedung parkir sehingga pada saat pengguna parkir memasuki gedung parkir, ia tidak perlu repot mencari parkir lagi karena sudah dijamin bahwa ia sudah memiliki satu tempat untuk parkir. Sistem menganalisa jumlah tempat parkir yang kosong, menentukan biaya untuk reservasi tempat parkir sesuai dengan keinginan pengguna, lalu menyimpan semua informasi parkir (Wang & He, 2011). Sebagai hasil dari perancangan sistem ini dikatakan bahwa sistem ini dapat mengurangi terjadinya kemacetan pada saat mencari tempat parkir.
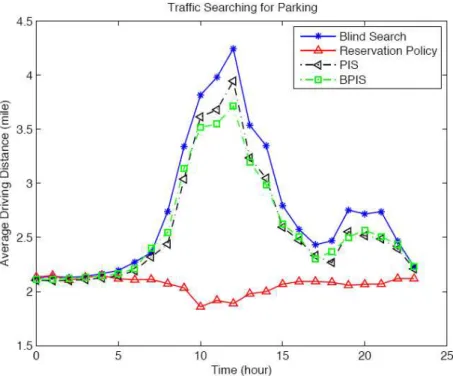
Gambar 2.2. Perbandingan tingkat kemacetan saat pencarian parkir dengan metode yang berbeda-beda (Wang & He, 2011)
Apabila dibandingkan perbandingannya antara ketiga sistem parkir yang umum digunakan sekarang dengan sistem parkir pintar yang dirancang oleh Wang, et al, sistem reservasi dapat mengurangi kemacetan jauh lebih baik dibandingkan dengan sistem lainnya.
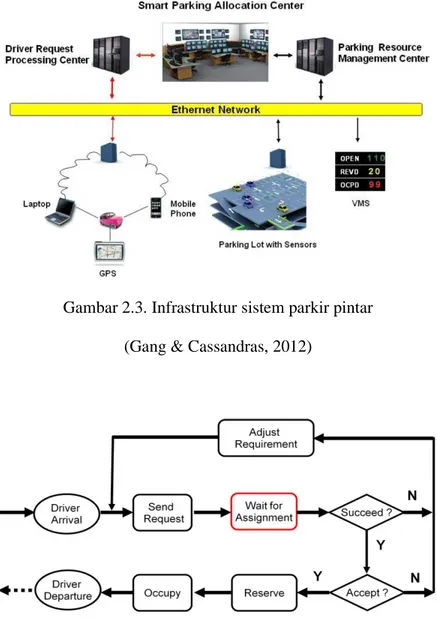
Untuk lebih memperjelas kerja sistem dari sistem reservasi yang dibuat oleh Wang, et al, Geng, et al, membuat sistem parkir yang juga menggunakan sistem reservasi, jaringan Ethernet dan juga sebuah pusat pengelolaan untuk alokasi parkir.
Gambar 2.3. Infrastruktur sistem parkir pintar (Gang & Cassandras, 2012)
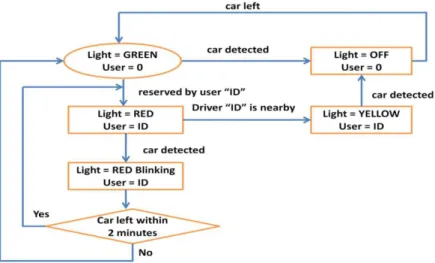
Gambar 2.4. Prosedur sistem parkir secara keseluruhan (Gang & Cassandras, 2012)
Melihat prosedur sistem parkir pada gambar 2.4., dimulai dari pengendara yang tiba di gedung parkir akan mengirimkan sebuah permintaan untuk lokasi tempat parkir yang masih kosong. Lalu informasi lokasi parkir yang kosong akan dikirim ke pengendara dan apabila pengendara tidak menyukai lokasi tersebut, maka akan meminta kembali tempat parkir yang sesuai dengan pengendara. Jika pengendara
mau, maka tempat parkir tersebut akan di-reservasi sehingga pengendara dapat menggunakan tempat parkir tersebut.
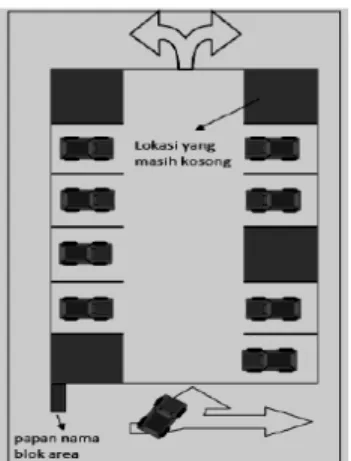
Gambar 2.5. State Machine indikator LED (Gang & Cassandras, 2012)
Dari state machine pada gambar 2.5., dibagi menjadi tiga hasil alokasi. Pertama, jika sistem gagal mencari tempat parkir kosong bagi pengendara, maka akan muncul sebuah peringatan kepada pengendara untuk menunggu alokasi selanjutnya. Kedua, jika tempat parkir dialokasikan ke pengendara, tetapi pengendara tidak puas, maka dia dapat menolak alokasi tersebut dan menyesuaikan kembali permintaannya. Ketiga, jika pengendara puas, maka sistem akan mem-booking tempat untuknya dan aplikasi akan menunjukkan letak tempat parkir. Untuk menandai tempat parkir yang terisi, kosong atau sedang di-booking dapat dilihat dari indikator LED pada tempat parkir.
Dengan menerapkan sistem tersebut, hasil yang didapatkan adalah dimana sistem parkir pintar hanya memberikan panduan untuk mencari tempat parkir, tetapi juga memiliki kemampuan untuk mendeteksi ketersediaan tempat parkir yang kosong
dan dapat mengoptimalkan alokasi tempat parkir ke pengendara (Gang & Cassandras, 2012).
2.1.2 Metode Pendeteksi Tempat Parkir
Terdapat berbagai macam metode yang digunakan untuk dapat mendeteksi apakah tempat parkir sudah terisi atau atau belum. Mulai dari penggunaan cara manual, kamera (visual-based), dan sensor ultrasonik.
Berdasarkan penelitian Prasepta, et al, merancang sebuah sistem pencarian tempat parkir bagi pengunjung sebuah mall, dibuatlah metode pendeteksi dengan menggunakan 3 konsep metode alternatif (Surbakti & Septian, 2011), yaitu sebagai berikut:
a. Alternatif pertama menggunakan sebuah boom gate yang berfungsi sebagai palang otomatis pintu parkir dan terhubung pada komputer yang mengendalikan blok tersebut. Terdapat juga sebuah sensor kabel loop, berfungsi sebagai sensor dari palang pintu otomatis tersebut, yang tertanam di bawah tanah dan terhubung dengan boom gate. Ketika ada mobil yang hendak masuk, palang pintu akan otomatis buka dan apabila mobil melewati palang dan menginjak kabel loop yang tertanam, maka boom gate secara otomatis tertutup. Gambarnya dapat dilihat pada gambar 2.6.
Gambar 2.6. Konsep Alternatif 1 (Surbakti & Septian, 2011)
b. Alternatif kedua menggunakan metode manual, yaitu dengan menggunakan seorang petugas di lapangan guna memberitahu kepada mobil yang lewat bahwa terdapat parkir yang kosong atau tidak pada blok tersebut sehingga mobil dapat mengetahui kondisi tempat parkir pada saat hendak memasuki atau melewati blok tersebut. Gambarnya dapat dilihat pada gambar 2.7.
Gambar 2.7. Konsep Alternatif 2 (Surbakti & Septian, 2011)
c. Alternatif ketiga menggunakan sebuah monitor panel di setiap blok tempat parkir. Gunanya adalah agar pengunjung dapat memilih sendiri lokasi parkirnya yang tertampil di layar monitor, dimana sebelumnya pengunjung dapat mengetahui total tempat parkir kosong pada panel monitor digital yang berada di setiap blok. Tentunya untuk dapat mendeteksi jumlah tempat parkir yang kosong digunakanlah sensor di masing-masing tempat. Gambarnya dapat dilihat pada gambar 2.8.
Gambar 2.8. Konsep Alternatif 3 (Surbakti & Septian, 2011)
Melihat ketiga konsep yang ada, dari penilaian yang dilakukan, konsep yang terpilih adalah konsep ketiga karena untuk kriteria pada efektifitas waktu bagi pengunjung yang merupakan kriteria utama pada tujuan penelitian yang dilakukan, dan konsep ketiga ini memiliki nilai tertinggi (Surbakti & Septian, 2011).
Tabel 2.1. Penilaian Pemilihan Konsep (Surbakti & Septian, 2011)
Berdasarkan penelitian Kianpisheh, et al, mereka membagi metode pendeteksi tempat parkir menjadi dua metode (Kianpisheh, Mustaffa, Limtrairut, & Keikhosrokiani, 2012), yaitu sebagai berikut:
a. Vision-based Method
Untuk membantu pengendara mencari tempat parkir yang kosong tanpa banyak usaha, sistem parkir harus menyediakan informasi mengenai lokasi spesifik tempat parkir yang kosong dan tidak hanya jumlah tempat yang tersedia. Untuk mendeteksi status dari tempat parkir sudah menggunakan berbagai macam metode, salah satunya adalah pemasangan kamera pada posisi yang tinggi untuk melihat parkir yang terisi dan belum.
Metode pendeteksi dengan menggunakan kamera dan pemrosesan gambar kurang akurat dan dapat terpengaruh oleh peubahan lingkungan atau cuaca. Permasalahan utama dari sistem pendeteksi vision-based adalah seperti efek bayangan, efek kemacetan, distorsi perspektif, dan kebimbangan kondisi cahaya sehingga seringkali terjadi kesalahan informasi mengenai tempat yang kosong.
b. Sensor-based Method
Teknologi sensor dikategorisasikan baik intrusive atau non-intrusive. Sensor ultrasonik terkategorisasi sebagai sensor non-intrusive, artinya instalasi yang dibutuhkan lebih sederhana dibandingkan dengan sensor intrusive. Sensor ultrasonik dapat mengirim gelombang suara antara 25 kHz dan 50 kHz. Gelombang ultrasonik dikirim dari kepada sensor ultrasonic setiap 60 milisekon, dan adanya atau tidaknya kendaraan ditentukan oleh perbedaan waktu antara sinyal pengirim dan penerima. Namun walaupun mudah instalasi dan biayanya murah, sensor tersebut memiliki kelemahan, yaitu sensitif terhadap perubahan suhu dan turbulensi udara yang ekstrim.
Berdasarkan pada metode pendeteksi parkir yang disebutkan oleh Kianpisheh, et al, menggunakan sensor ultrasonik sebagai pendeteksi tempat parkir lebih efektif. Kianpisheh, et al, menjelaskan bagaimana sebuah sensor ultrasonik bekerja sebagai pendeteksi adanya mobil seperti yang terlihat pada gambar 2.9.
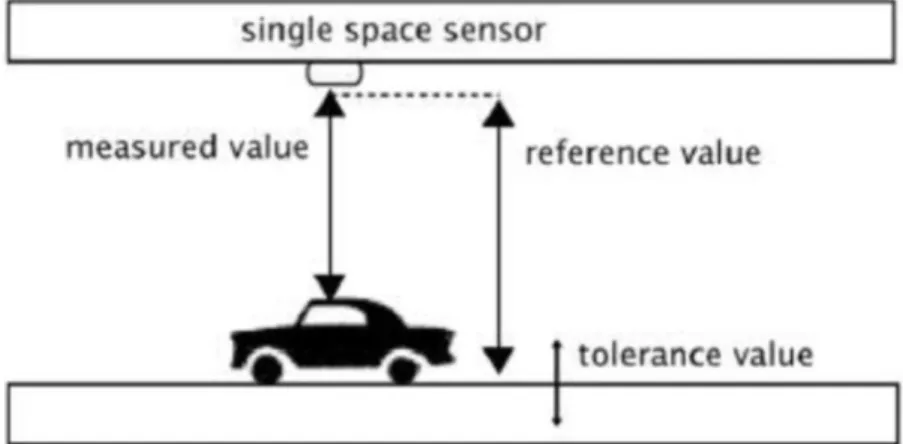
Gambar 2.9. Bagaimana Sebuah Sensor Ultrasonik Bekerja (Kianpisheh, Mustaffa, Limtrairut, & Keikhosrokiani, 2012)
Gambar 2.10. Area Deteksi Sensor Ultrasonik (Kianpisheh, Mustaffa, Limtrairut, & Keikhosrokiani, 2012)
Gambar 2.9. menunjukkan bagaimana sebuah sensor ultrasonik mendeteksi adanya mobil atau tidak. Sensor akan memiliki nilai referensi yang berasal dari jarak antara sensor dengan tanah. Selain itu juga tinggi mobil memiliki suatu nilai yang disebut sebagai nilai toleransi. Ketika mobil memasuki tempat parkir, maka nilai refernsi sensor akan dikurangi dengan nilai toleransi dan mendapatkan nilai baru yaitu selisih nilai referensi dengan toleransi. Jika lebih kecil dari nilai referensi, maka akan dianggap bahwa ada sebuah mobil.
Seperti halnya pada gambar 2.10., sensor ultrasonik bekerja berdasarkan pantulan suara. Apabila mengenai sebuah benda solid (mobil atau tanah), akan dipantulkan kembali ke sensor. Waktu antara pengiriman suara dan pantulan yang dihasilkan digunakan untuk mengukur jarak. Pada area yang kosong, waktu antara pengiriman suara dan pantulan lebih lama dibandingkan ketika terdapat suatu mobil sehingga akan dianggap kosong.
Dari penelitian yang dilakukan oleh Kianpisheh, et al, sensor ultrasonik menjadi alternatif yang baik untuk mendeteksi tempat parkir yang kosong. Arsitektur sistem parkir yang telah dirancang dapat mengurangi waktu bagi pengendara untuk mencari tempat parkir dan mengurangi kemungkinan adanya mobil yang menempati
dua tempat parkir sekaligus (Kianpisheh, Mustaffa, Limtrairut, & Keikhosrokiani, 2012).
2.2. Pengaplikasian RS485 dan Perbedaannya Dengan RS232
RS485 dan RS232 merupakan protokol komunikasi serial yang sering digunakan untuk komunikasi jarak jauh dimana hal tersebut merupakan kelebihan komunikasi serial dibandingkan dengan komunikasi paralel yang memiliki kelebihan pada kecepatan komunikasi data. Kedua protokol baik RS485 maupun RS232 merupakan komunikasi data serial asinkron.
Perbedaan utama antara RS485 dan RS232 adalah dimana RS485 dapat memiliki komunikasi multimaster - multislave, artinya untuk melakukan komunikasi, satu atau lebih sumber (master), dapat mengirimkan data ke ataupun menerima data dari beberapa penerima (slave) secara bersamaan ataupun bergantian. Sementara itu, komunikasi RS232 bersifat point-to-point antara pengirim dan penerima. Terdapat tiga mode komunikasi serial yang dapat dilakukan pada RS485 dan RS232, yaitu simplex, half duplex, dan full duplex. (Vitria, 2008). Pada umumnya protokol RS485 menggunakan mode komunikasi serial half duplex dimana pengiriman ataupun penerimaan data terjadi secara bergantian.
RS485 memiliki kelebihan lainnya yaitu meskipun lingkungan sekitarnya tidak baik, namun performa yang dimilikinya tetap baik dan tinggi. Lingkungan yang tidak baik di sini adalah seperti lingkungan yang memiliki banyak noise, elektromagnetik tinggi, dan impedansi tinggi, sedangkan yang dimaksud dengan performa yang tinggi adalah dimana RS485 tetap menjaga kecepatan pengiriman data saat melakukan komunikasi. Kecepatan mengirim pada pengirim RS485 dapat mencapai 10Mbps, sementara untuk kecepatan pengirim RS232 hanya mencapai
500Kbps dan perlu diperhatikan jarak dan kondisi lingkungan untuk RS232. Semakin jauh jaraknya, maka kecepatan pengiriminan akan berkurang. (Tanghe, 2011)
Jarak maksimum untuk pengiriman dengan menggunakan RS232 adalah 15 meter, sementara untuk RS485 jarak maksimum yang dapat dicapai untuk transmisi data adalah 1,2 Km. Hal yang menyebabkan RS485 mampu berkomunikasi dengan jarak yang lebih jauh adalah penggunaan balanced line. Yang dimaksud dengan balanced line adalah kesamaan nilai impendansi antara A dengan B sepanjang jalur RS485 serta kesamaan nilai impedansi terhadap ground dan rangkaian lainnya. Semakin jauh jaraknya akan mempengaruhi kecepatan transmisi data yang dapat dilakukan. Batas maksimum penerima pada RS485 adalah 32 unit dimana kelebihan dari RS485 pada penerima atau slave dapat diberikan tanda pengenal pada masing-masing penerima untuk membedakan satu penerima dengan penerima lainnya (Vitria, 2008).
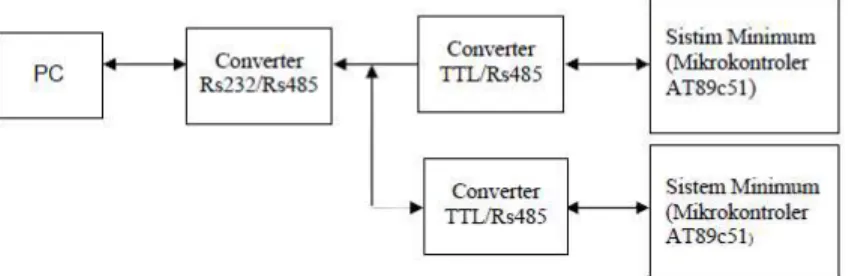
Implementasi komunikasi serial RS485 dapat digunakan untuk komunikasi pada komputer (PC) atau pada sebuah sistem yang menggunakan mikrokrontroler. Salah satu jenis mikrokontrolernya adalah AT89C51 dan AT89C52. Berikut adalah gambar implentasi komunikasi RS485 menggunakan PC dan sebuah sistem dengan mikrokontroler. (Vitria, 2008)
Gambar 2.11. Blok Diagram Modul Komunikasi Data Serial dengan RS485 (Vitria, 2008)
Gambar 2.12. Komunikasi Antar Jaringan Komputer Dengan RS485 (Vitria, 2008)
Untuk mewujudkan gambar 2.12., dibutuhkan sebuah IC SN75176 yang digunakan sebagai komponen modul utama pada RS485 untuk komunikasi data bidirectional atau multipoint dengan standard EIA/TIA-422B-B dan ITU V11. Data yang dikirimkan oleh IC ini dikirim dalam bentuk perbedaan tegangan yang ada antara kaki A dan B dari SN75176. SN75176 berfungsi sebagai pengirim data atau penerima data tergantung dari kondisi kaki - kaki pengendalinya, yaitu pin DE dan RE. Apabila kaki DE diset logika 0 dan RE diset logika 0, maka SN75176 berfungsi sebagai penerima, jika DE dan RE diset logika 1 maka SN75176 akan berfungsi sebagai pengirim. Berikut adalah konfigurasi pin IC tersebut pada gambar 2.13. (Vitria, 2008)
Gambar 2.13. Konfigurasi Sususan Pin SN75176 (Vitria, 2008)
Untuk mengetahui lebih jelas lagi mengenai cara kerja dari RS485 pada saat melakukan proses pengiriman data dan penerimaan data dapat dilihat melalui flowchart pada gambar 2.14.
Gambar 2.14. Flowchart Pengiriman Data (Kiri) dan Penerimaan Data (Kanan) (Vitria, 2008)
Pada gambar di atas menunjukkan dua flowchart dimana flowchart sebelah kiri menunjukkan cara kerja saat master pada RS485 akan melakukan pengiriman data ke slave, sedangkan gambar pada sebelah kanan menunjukkan cara kerja slave pada saat menerima data atau ID-nya ditunjuk oleh master.
Ketika master akan mengirimkan sebuah data ke slave, pertama-tama master harus diubah ke dalam modus pengirim. Lalu, master akan mengirimkan slave ID atau menunjuk slave yang ingin dituju untuk melakukan pengiriman data. Setelah mengirim ID, maka barulah master dapat mengirimkan data yang ingin dikirim. Setelah mengirim data, master akan kembali ke modus penerima untuk menerima data dari slave.
Melihat dari cara kerja slave, slave akan menunggu sampai ID-nya dipanggil oleh master. Ketika ID-nya ditunjuk, maka barulah slave dapat mengirimkan data ke
master dan tentunya slave juga dapat diatur modusnya saat melakukan pengiriman dan penerimaan data sama seperti master.
2.3. Implemetasi FreeRTOS pada PIC32
Pada dasarnya, peran dari sebuah RTOS adalah untuk mengeksekusi tugas-tugas suatu aplikasi dalam waktu yang dapat diprediksi agar mampu untuk bertemu dengan deadline secara handal. Terlebih pentingnya adalah RTOS mampu untuk memberikan jaminan mengenai waktu eksekusi real-time system yang paling buruk sekalipun. RTOS juga bertanggung jawab untuk melakukan koordinasi penjadwalan tugas-tugas dengan melihat prioritas dari masing-masing tugas (Mistry, 2011).
FreeRTOS adalah sebuah kernel Real Time Operating System (RTOS) dan umum digunakan pada embedded real-time system. Pada umumnya, bahasa pemrograman yang digunakan untuk adalah bahasa pemrograman C. FreeRTOS sangat portable dan dapat diaplikasikan pada berbagai jenis platform. FreeRTOS memiliki kelebihan pada ukurannya yang kecil juga.
FreeRTOS sangat cocok digunakan pada sistem yang menggunakan banyak sensor dengan sejumlah proses untuk mengendalikan masing-masing sensor tersebut (contoh: sensor arus air). Apabila sistem menggunakan FreeRTOS, maka sistem dapat menjamin tidak terjadi overflow pada sistem karena mengutamakan waktu yang presisi untuk setiap proses yang diberikan. (Andersson & Andersson, 2005)
Pada penelitian yang dilakukan oleh Andersson, mereka membandingkan dua jenis RTOS yang berbeda, yaitu FreeRTOS dengan RTLinux untuk melihat perbedaan dari kedua RTOS tersebut. Berikut ini adalah hasil perbandingan mereka dari beberapa aspek yang diteliti (Andersson & Andersson, 2005).
• Ukuran
Dalam masalah ukuran, hal utama yang harus diperhatikan adalah platform apa yang digunakan dalam pembuatan sebuah proyek. FreeRTOS baik digunakan jika menggunakan platform kecil. FreeRTOS dapat mendukung banyak prosesor kecil dan mikrokontroler. Pada umumnya digunakan untuk mikrokontroler. Apabila untuk PC, maka RTLinux menjadi pilihan yang lebih baik.
• Kompleksitas
FreeRTOS sangat sederhana karena berupa source code yang dapat digunakan ke dalam suatu proyek. Untuk proyek-proyek kecil, menggunakan FreeRTOS menjadi lebih baik karena kesederhanaannya. Sedangkan untuk proyek yang besar RTLinux lebih baik karena memiliki banyak fungsi di dalamnya.
• Time Critical
Pada proyek yang tidak memerlukan waktu yang presisi untuk melakukan suatu tugas, maka RTLinux menjadi pilihan yang baik, tetapi apabila memerlukan waktu yang presisi untuk mengerjakan suatu tugas, maka FreeRTOS menjadi pilihan terbaik karena FreeRTOS lebih menjamin tugas dapat diselesaikan pada waktu yang ditentukan.
• Ekonomis
FreeRTOS adalah sebuah kernel RTOS yang open source, maka untuk menggunakannya tidak perlu membayar apapun, termasuk royalty.
• Pembagian Tugas
Pada pembagian tugas yang dilakukan oleh FreeRTOS karena bentuknya yang lebih kecil dan sederhana, maka FreeRTOS dapat membagi
tugas-tugasnya dengan baik karena FreeRTOS lebih mengutamakan pemberian prioritas kepada tugas-tugas yang ada. Berbeda dengan RTLinux yang lebih besar dan kompleks. Memang dapat mengerjakan lebih banyak tugas, tetapi jika melakukan pemrosesan data akan menjadi suatu masalah bagi RTLinux.
Berdasarkan pada perbandingan yang dilakukan oleh Andersson, penggunaan kedua RTOS tersebut memiliki kelebihan dan kekurangan masing-masing.
Menurut Goyette, FreeRTOS merupakan library yang portable, open source dan dikenal juga sebagai mini real-time kernel. Berikut adalah beberapa fungsi utama atau karakteristik sebagai berikut:
• Real-time
FreeRTOS dapat dimasukan kedalam hard real-time operating system .
• Inter-Process Communication
Terdapat beberapa task yang dapat dikerjakan secara bersamaan ketika menggunakan FreeRTOS dan memiliki proses queuing atau scheduling antar task dimana setiap task dikerjakan sesuai urutan yang dibuat. Perlu diingat bahwa priority antar masing-masing task sama.
• Priority Inversion
Di dalam FreeRTOS, task dapat diatur prioritasnya jika diperlukan sehingga akan ada task yang diutamakan atau dikerjakan terlebih dahulu. (Goyette, 2007)
2.4. Pengaplikasian Sensor Ultrasonik HC-SR04
Sensor Ultrasonik memiliki dua buah fungsi yaitu mengirim sinyal (Trigger) dan menerima sinyal (Echo). Keuntungan sensor ultrasonik untuk menghitung jarak ke objek dengan menghitung interval waktu antara sinyal trigger dengan sinyal echo. HC-SR04 memiliki kemampuan untuk memancarkan dan menerima sinyal ultrasonik dengan sudut jangkauan sebesar 15 derajat kearah kanan dan kiri dari arah dengan jarak maksimum untuk mendeteksi objek sebesar empat meter tetapi memiliki kemungkinan terjadinya error atau tidak terbaca. Maksimum dari sensing rate sensor adalah 20Hz. (Lee, et al., 2012)
Gambar 2.15. Prinsip Kerja Sensor Ultrasonik Untuk Pengukuran Jarak (Aldrin, Sumardi, & Setiawan, 2002)
Gambar 2.16. Ilustrasi Cara Kerja Sensor HC-SR04 (Aldrin, Sumardi, & Setiawan, 2002)