i
TUGAS AKHIR
PEMETAAN LOKASI
PADA SISTEM PEMETAAN DAN PENGAWASAN RADIO FM
BERBASIS SISTEM INFORMASI GEOGRAFIS (SIG)
DI WILAYAH D.I. YOGYAKARTA
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh:
MATILDA DWI ASUMTA ATMANINGSIH NIM : 065114025
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT
LOCATED MAPPING
SYSTEM FOR MAPPING AND MONITORING RADIO FM
BASED ON GEOGRAPHICAL INFORMATION SYSTEM (SIG)
REGION D.I. YOGYAKARTA
Presented as Partial Fulfillment of the Requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
MATILDA DWI ASUMTA ATMANINGSIH NIM : 065114025
ELECTRICAL ENGINEERING STUDY PROGRAM
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
vi
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
MOTTO:
Kegagalan adalah awal dari
keberhasilan…..
Skripsi ini kupersembahkan untuk…….
Tuhan Yesus Kristus yang selalu melindungiku
Bapak, Ibu, Kakakku, dan kekasihku yang selalu
viii
INTISARI
Penggunaan alokasi frekuensi radio FM harus diatur karena jumlah stasiun radio FM sangat banyak sedangkan alokasi frekuensi radio FM terbatas. Pengaturan alokasi frekuensi didasarkan pada hasil pengawasan radio. Salah satu informasi penting dalam pengawasan radio adalah data posisi yang digunakan untuk mengetahui lokasi radio tersebut. Penelitian ini bertujuan untuk menghasilkan sebuah pemetaan lokasi pada sistem pengawasan radio FM berbasis sistem informasi geografis (SIG).
Program pemetaan lokasi bekerja untuk melakukan pengambilan data lokasi, konversi data posisi, pemetaan pada peta digital, dan penghitungan jarak antara lokasi pemancar dengan lokasi layanan. Pengambilan data posisi dilakukan dengan perangkat GPS (Global Positioning System) yang meliputi data koordinat bujur dan lintang. Data koordinat ini selanjutnya dikonversi menjadi koordinat x dan y yang akan ditampilkan pada peta digital. Selain tampilan letak radio pada peta digital, program ini juga melakukan perhitungan jarak berdasarkan data koordinat bujur dan lintang.
Program pemetaan lokasi telah digunakan untuk mengambil data posisi dari 20 radio FM dan 3 lokasi layanan yang tersebar di wilayah D.I.Yogyakarta. Berdasarkan hasil pengambilan data posisi, diperoleh selisih rata-rata untuk koordinat bujur sebesar 0,00019 dan untuk koordinat lintang sebesar 0,00009. Hasil perhitungan jarak memiliki selisih rata-rata sebesar 386,64 meter.
ix
ABSTRACT
The use of the allocation of FM radio frequency has to be controlled because the amount of FM radio station is excessively whereas the allocation of FM radio frequency is limited. The control of the frequency allocation is based on the radio controlling result. One of the most important information in the radio monitoring is data position which is used to find the location of the radio. The purpose of this research is to create a location mapping in the system of FM radio monitoring which has as a base of geographical information system(SIG).
The location mapping program works to commit the withdrawal of data location, the conversion of data position, the mapping on the digital map, and the counting of the distance between the transmitter location and the service location. The withdrawal of data position is commited by GPS (Global Positioning System) devices which includes longitude and latitude data coordinates. This data coordinates will be converted become x and y coordinates which is presence in the digital map. Besides the presence of the radio location on the digital map, this program also commits counting the distance between longitude and latitude coordinates.
Location mapping program has been used to take the position data from 20 FM radio and 3 service locations which are spread in D.I.Yogyakarta area. Based on the result of data position withdrawal, the difference of the average for longitude coordinate is 0,00019 and 0,00009 for latitude coordinate. The distance measurement has average difference of 386,64 meter
xi
DAFTAR ISI
HALAMAN JUDUL... i
HALAMAN JUDUL... ii
LEMBAR PENGESAHAN OLEH PEMBIMBING... iii
LEMBAR PENGESAHAN OLEH PENGUJI... iv
LEMBAR PERNYATAAN KEASLIAN KARYA... v
HALAMAN PERSEMBAHAN DAN MOTO HIDUP... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS... vii
INTISARI... viii
ABSTRACT... ix
KATA PENGANTAR... x
DAFTAR ISI... xi
DAFTAR GAMBAR... xv
DAFTAR TABEL... xvii
BAB I PENDAHULUAN... 1
1.1. Latar Belakang... 1
1.2. Tujuan dan Manfaat... 2
1.3. Batasan Masalah ... 2
1.4. Metodologi Penelitian... 2
BAB II DASAR TEORI... 4
2.1. GPS (Global Positioning System)... 4
2.1.1. Segmen Penyusun Sistem GPS ... 4
2.1.1.1. Segmen Kontrol... 4
2.1.1.2. Segmen Satelit ... 5
2.1.1.3. Segmen Pengguna atau Pemakai ... 5
2.1.2. Sinyal ... 5
2.1.2.1. Informasi Jarak ... 6
2.1.2.2. Informasi Posisi ... 8
2.1.2.2.1. Metode Penentuan secara Absolut... 9
xii
2.1.2.3. Gelombang Pembawa ... 9
2.1.3. Kesalahan dan Bias Pengamatan ... 9
2.1.3.1. Kesalahan Orbit ... 10
2.1.3.2. Bias Ionosfer... 10
2.1.3.3. Bias Troposfer ... 10
2.1.3.4. Multipath ... 10
2.1.3.5. Cycle slip ... 10
2.1.3.6. Selective Availability ... 11
2.1.3.7. Anti Spoofing ... 11
2.1.3.8. Ambiguitas Fase ... 11
2.1.4. Ketelitian Posisi GPS ... 11
2.1.5. Format data GPS ... 12
2.2. Sistem Informasi Geografis ... 14
2.3. Peta ... 15
2.3.1 Peta Khusus atau Tematik... 15
2.3.2 Fungsi Peta... 16
2.4. Peta Digital ... 16
2.4.1. Data Peta Digital ... 17
2.4.1.1. Data Spasial ... 17
2.4.1.2. ImageData... 18
2.4.1.3. Sistem Tampilan data ... 19
2.5. Sistem Koordinat dan Proyeksi ... 20
2.5.1. Sistem Koordinat Bujur-Lintang (Longitude - Latitude)... 20
2.5.2. Sistem koordinatUniversal Transverse Mercator(UTM) ... 21
2.5.3. Sistem Konversisatuan Geodasi ke UTM (Universa Tranverse Mercator) ... 23
2.6. Universal Serial Bus(USB) ... 24
2.7. DriverUSB untuk PemogramanVisual... 25
2.8. PemogramanVisual... 25
BAB III RANCANGAN PENELITIAN... 27
3.1. Algoritma Sistem Keseluruhan... 28
3.2. Prosedur Pengawasan Posisi... 29
xiii
3.2.2. Diagram Alir Pengambilan Data Posisi dari GPS... 30
3.2.3. Diagram Alir Konversi... 31
3.2.4. Diagram Alir Penyimpanan Basis Data ... 32
3.2.5. Diagram Alir Penampil Peta Digital... 32
3.3. Perancangan Basis Data... 33
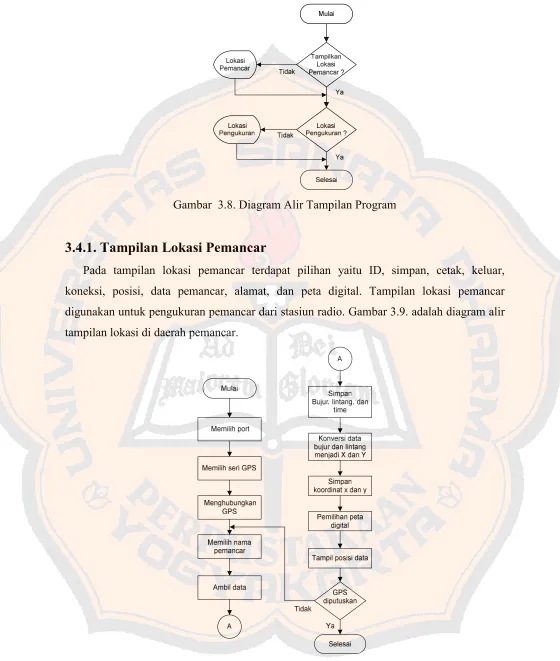
3.4. Diagram Alir Tampilan Program... 34
3.4.1. Tampilan Lokasi Pemancar... 35
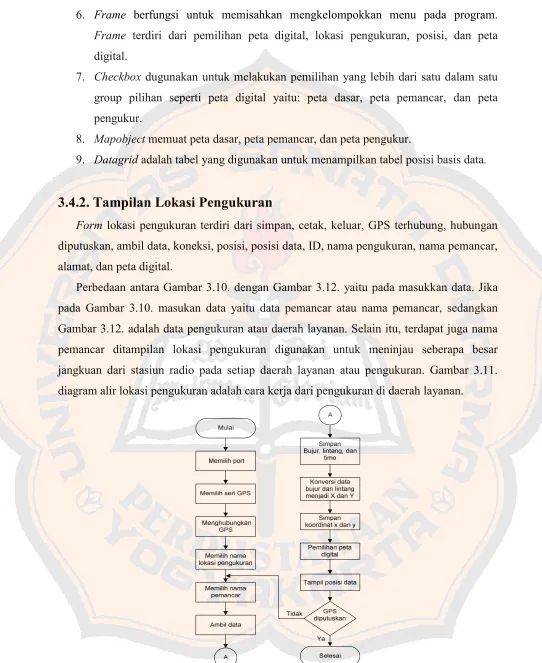
3.4.2. Tampilan Lokasi Pengukuran ... 37
BAB IV HASIL DAN PEMBAHASAN... 40
4.1. Tampilan Program ... 40
4.1.1. Splash Screen ... 40
4.1.2. TampilanFormLokasi Pemancar... 40
4.1.3. TampilanFormLokasi Pengukuran ... 43
4.2. Pengujian Program ... 45
4.2.1. Pengujian Program PadaFormLokasi Pemancar... 45
4.2.1.1. Pengujian Pengambilan Data Posisi ... 45
4.2.1.1.1. Pengujian Pencarian Data... 46
4.2.1.1.2. Pengujian Ambil Data ... 47
4.2.1.2. Pengujian Pemberian Nomor... 49
4.2.1.3. Pengujian Konversi... 51
4.2.1.4. Pengujian Penyimpanan Data... 54
4.2.1.5. Pengujian Tampilan Peta Digital ... 54
4.2.1.6. Pengujian Tampilann Titik Lokasi Pemancar ... 56
4.2.1.7. Pengujian Tampilan Peta ... 58
4.2.2. TampilanFormLokasi Pengukuran ... 59
4.2.2.1. Pengujian Pengambilan Data Posisi ... 60
4.2.2.1.1. Pengujian Pencarian Data ... 60
4.2.2.1.2. Pengujian Ambil Data ... 60
4.2.2.2. Pengujian Pemberian Nomor... 60
4.2.2.3 Pengujian Konversi... 61
4.2.2.4. Pengujian Penyimpanan Data... 62
4.2.2.5. Pengujian Titik Lokasi Pengukuran ... 63
xiv
4.3. Pengujian Menu Bantuan... 67
4.4. Pengujian Menu Cetak... 68
BAB V KESIMPULAN DAN SARAN... 69
5.1. Kesimpulan ... 69
5.2. Saran... 69
xv
DAFTAR GAMBAR
Gambar 1.1. Model sistem... 3
Gambar 2.1. Segmen penyusun GPS... 4
Gambar 2.2. Penentuan jarak dengan kode ... 7
Gambar 2.3. Skema jarak ukuran dari pengamat ke satelit pada gelombang dalam waktu t. ... 7
Gambar 2.4. Peta tematik ... 15
Gambar 2.5. Proses digitasi ... 16
Gambar 2.6. Data Vektor... 17
Gambar 2.7. Data Raster... 18
Gambar 2.8. Konseplayer... 19
Gambar 2.9. Koordinat Bujur-Lintang ... 20
Gambar 2.10. Zona bujur... 21
Gambar 2.11. Zona lintang ... 21
Gambar 2.12. Proyeksi UTM WGS 1984 zone 48S... 22
Gambar 2.13. Zone UTM ... 22
Gambar 2.14. Konektor tipe A dan konektor tipe B... 24
Gambar 2.15.Interface visual... 25
Gambar 2.16. Komponen standar dalamtoolbox... 26
Gambar 3.1. Diagram Blok Sistem Keseluruhan ... 27
Gambar 3.2. Diagram Alir pengawasan Posisi... 29
Gambar 3.3. Diagram Alir koneksi ... 30
Gambar 3.4. Diagram Alir Pengambilan Data posisi dari GPS... 31
Gambar 3.5. Diagram Alir konversi ... 31
Gambar 3.6. Diagram Alir Penyimpanan Basis Data... 32
Gambar 3.7. Diagram Alir Penampil Peta Digital... 33
Gambar 3.8. Diagram Alir Tampilan Program... 35
Gambar 3.9. Diagram Alir Tampilan Lokasi Pemancar... 35
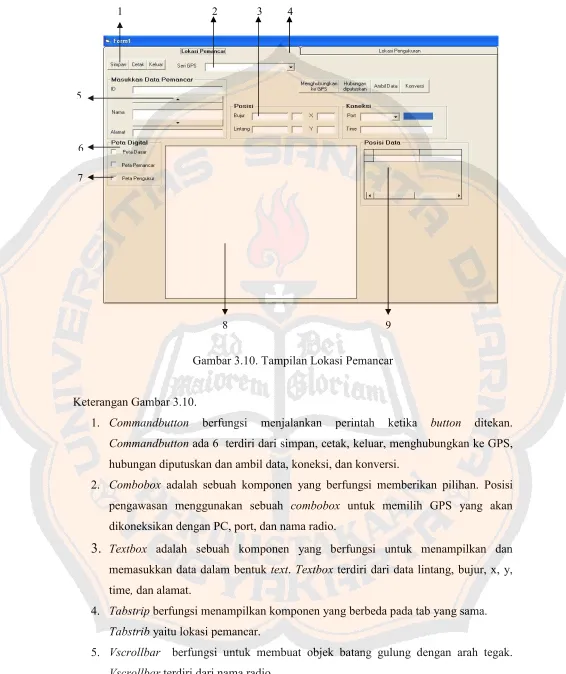
Gambar 3.10. Tampilan Lokasi Pemancar ... 36
Gambar 3.11. Diagram Alir Lokasi Pengukuran ... 37
xvi
Gambar 4.1. TampilanSplash Screen... 40
Gambar 4.2. Tampilan program lokasi pemancar ... 41
Gambar 4.3. Tampilan program lokasi pengukuran layanan... 44
Gambar 4.4. Proses pencarian letakfiledalammemory cardGPS ... 46
Gambar 4.5. Tampilan pengambilan data posisi yang ditampilkan padaframeposisi ... 48
Gambar 4.6. Kutipan data posisi radio Q dari GPS... 49
Gambar 4.7. Tampilan proses pencarian nomor radio dari nama radio ... 50
Gambar 4.8. Tampilan proses pencarian nama radio dari nomor radio ... 50
Gambar 4.9. Konversi koordinat x dan y peta Yogyakarta ... 52
Gambar 4.10. Tampilan tabel dataquerySPA ... 54
Gambar 4.11.Filepeta yang ditampilkan pada kotak dialog... 55
Gambar 4.12. Tampilan peta digital padamap... 56
Gambar 4.13. Tampilan titik lokasi radio pemancar radio FM ... 56
Gambar 4.14.(a) Tampilan peta skala normal ... 58
Gambar 4.14.(b) Tampilan peta perbesaran 3 kali ... 59
Gambar 4.14.(c) Tampilan peta pengecilan 1 kali... 59
Gambar 4.15. Tampilan pemberian nomor lokasi pengukuran layanan... 61
Gambar 4.16. Proses konversi pada pengukuran layanan ... 61
Gambar 4.17. Tampilan tabel dataqueryFSM ... 62
Gambar 4.18. Tampilan letak pengukuran layanan ... 63
Gambar 4.19. Tampilan dua titik yang akan diukur jaraknya ... 64
Gambar 4.20. Tampilan hasil perhitungan jarak ... 65
Gambar 4.21. Tampilan menu bantuan ... 68
xvii
DAFTAR TABEL
Tabel 2.1. Ketelitian dari metode penentuan posisi secara absolut dan diferensial ... 12
Tabel 2.2. Jenis - jenis informasi (sentenceID) ... 13
Tabel 3.1. Tabel kolom dalam basis data ... 34
Tabel 4.1. Keterangan gambar tampilan program lokasi pemancar ... 41
Tabel 4.2. Keterangan gambar tampilan program lokasi pengukuran layanan ... 44
Tabel 4.3. Data posisi 20 stasiun radio di Yogyakarta ... 48
Tabel 4.4. Perbandingan nilai X dan Y antara perhitungan rumus dan perhitungan Program ... 53
Tabel 4.5. Perbandingan data koordinat yang diperoleh dari program pemetaan dengan data koordinat yang diperoleh dari balaimonitoring(Balmon)... 57
Tabel 4.6. Data posisi di 3 lokasi layanan ... 60
Tabel 4.7. Data posisi hasil pengukuran layanan ... 63
1
BAB I
PENDAHULUAN
1.1. Latar Belakang
Kehadiran stasiun siaran radio menjadi sangat penting karena memberikan informasi berupaaudio. Alokasi frekuensi stasiun radio FM adalah 88 – 108 MHz [1] dan AM adalah 530 – 1700 kHz. Rentang frekuensi radio FM jauh lebih lebar dibandingkan radio AM. Radio FM memiliki keunggulan, yaitu lebih menghemat daya, lebih tahan terhadap interferensi, dan kualitas audio yang dihasilkan lebih baik sehingga radio FM lebih banyak digunakan. Karena banyaknya jumlah stasiun radio FM serta keterbatasan alokasi frekuensi radio FM, penggunaan alokasi frekuensi radio tersebut harus diatur sesuai dengan aturan yang berlaku dari International Telecommunication Union (ITU) [2]. Dengan adanya aturan dari ITU tersebut, spektrum frekuensi radio membutuhkan pengawasan spektrum frekuensi radio dengan pengukuran secara periodik sekaligus untuk penertiban supaya penggunaan spektrum frekuensi tetap sesuai dengan aturan yang berlaku.
Penelitian yang telah dilakukan merupakan sebuah web SIG (Sistem Informasi Geografis) yang diaplikasikan untuk manajemen informasi stasiun radio. Data spasial untuk web SIG ini diperoleh dari laporan pihak swasta stasiun radio ke kantor pusat informasi untuk diolah menjadi suatu peta digital yang menginformasikan status siar tiap stasiun radio baik dilihat dari aktif atau tidak stasiun radio tersebut melakukan siaran, perpindahan lokasi pemancar maupun lainya [3]. Salah satu contohwebSIG ini telah lama digunakan di Cina untuk membantu proses pendirian stasiun radio siaran sehingga efisien dalam proses administrasi dan pengawasan.
1.2.Tujuan dan Manfaat Penelitian
Tujuan dari penelitian ini adalah menghasilkan perangkat lunak konversi data GPS yang diubah ke dalam SIG serta peta digital yang memberikan informasi lokasi (sistem koordinat geografis) yang terdiri dari peta dasar, peta pemancar, dan peta pengukur. Sistem informasi digabungkan dengan data dari SPA (Spectrum Analyzer) dan FSM (Field Strength Meter).
Manfaat Penelitian:
a. Memberikan koordinat lokasi suatu stasiun radio yang digunakan dalam pengukuran, pengawasan, pengaturan, dan penggunaan frekuensi radio bagi pihak yang berkepentingan (stasiun radio maupun dinas pengawasan frekuensi radio). b. Memberi tambahan informasi pada masyarakat tentang penggunaan frekuensi radio
di wilayah D.I. Yogyakarta.
c. Menjadi sarana pembelajaran bagi sivitas akademik untuk analisa informasi telekomunikasi yang menggunakan frekuensi radio, khususnya radio FM, dan cara kerja dari GPS.
1.3. Batasan Masalah
a. GPS yang digunakan menggunakanport serial
b. Menentukan data bujur dan lintang yang dikonversi ke X dan Y dari peta digital. c. Area pengawasan dan pengukuran dilakukan di daerah Yogyakarta.
d. Format data yang digunakan GPS adalahtext
e. Peta digital terdiri dari tiga layer yaitu peta dasar, peta pemancar, dan peta pengukur.
1.4. Metodologi Penelitian
a. Pengumpulan bahan-bahan referensi berupa buku, jurnal, dan informasi dari internet.
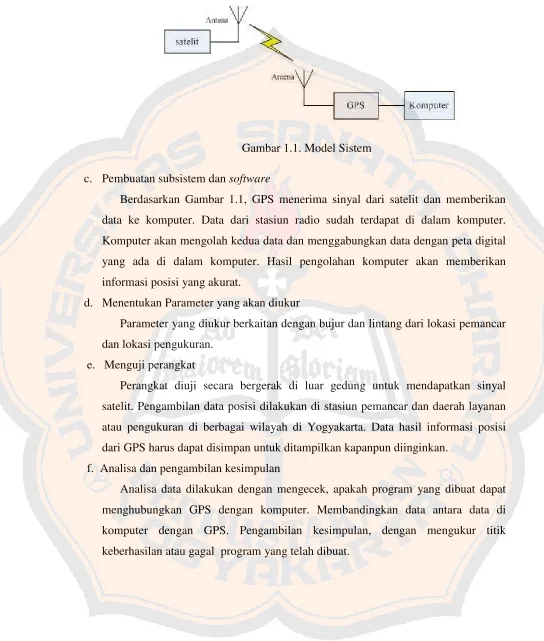
b. Menentukan model sistem
c. Pembuatan subsistem dansoftware
Berdasarkan Gambar 1.1, GPS menerima sinyal dari satelit dan memberikan data ke komputer. Data dari stasiun radio sudah terdapat di dalam komputer. Komputer akan mengolah kedua data dan menggabungkan data dengan peta digital yang ada di dalam komputer. Hasil pengolahan komputer akan memberikan informasi posisi yang akurat.
d. Menentukan Parameter yang akan diukur
Parameter yang diukur berkaitan dengan bujur dan lintang dari lokasi pemancar dan lokasi pengukuran.
e. Menguji perangkat
Perangkat diuji secara bergerak di luar gedung untuk mendapatkan sinyal satelit. Pengambilan data posisi dilakukan di stasiun pemancar dan daerah layanan atau pengukuran di berbagai wilayah di Yogyakarta. Data hasil informasi posisi dari GPS harus dapat disimpan untuk ditampilkan kapanpun diinginkan.
f. Analisa dan pengambilan kesimpulan
Analisa data dilakukan dengan mengecek, apakah program yang dibuat dapat menghubungkan GPS dengan komputer. Membandingkan data antara data di komputer dengan GPS. Pengambilan kesimpulan, dengan mengukur titik keberhasilan atau gagal program yang telah dibuat.
4
BAB II
DASAR TEORI
2.1. GPS (
Global Positioning System
)
GPS adalah teknologi yang memberikan informasi posisi koordinat dan sistem navigasi satelit, dengan nama resminya NAVSTAR GPS (Navigation Satellite Timing and Ranging Global Positioning System). Sistem ini digunakan untuk menentukan posisi, kecepatan, arah, dan waktu [4]. Satelit GPS pertama kali diluncurkan pada tahun 1978. Sistem GPS dinyatakan operasional pada tahun 1994.
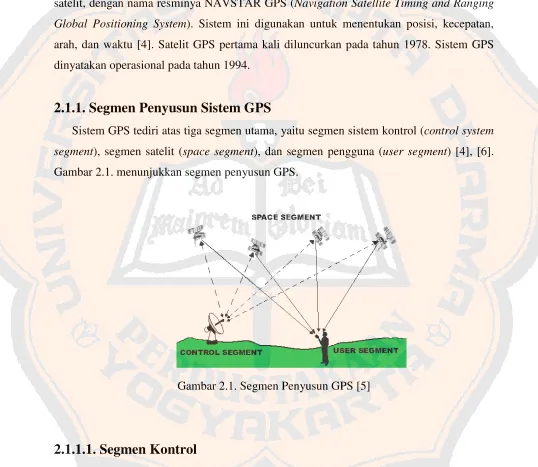
2.1.1. Segmen Penyusun Sistem GPS
Sistem GPS tediri atas tiga segmen utama, yaitu segmen sistem kontrol (control system segment), segmen satelit (space segment), dan segmen pengguna (user segment) [4], [6]. Gambar 2.1. menunjukkan segmen penyusun GPS.
Gambar 2.1. Segmen Penyusun GPS [5]
2.1.1.1. Segmen Kontrol
kesehatan satelit. Pihak Amerika Serikat mengoperasikan sistem ini dari sistem utama di Falcon Air Force Base di Colorado Springs, Amerika Serikat. Sistem kontrol ini juga termasuk 4 stasiun monitor yang berlokasi menyebar di seluruh dunia.
2.1.1.2. Segmen Satelit
Segmen satelit adalah satelit GPS yang mengorbit di angkasa sebagai stasiun radio [4]. Satelit GPS dilengkapi antena untuk mengirim dan menerima gelombang. Gelombang dipancarkan ke bumi dan diterima oleh receiver GPS yang ada di bumi dan digunakan untuk menentukan informasi posisi, kecepatan, dan waktu.
Satelit GPS terdiri dari 24 satelit yang menempati 6 bidang orbit dengan periode orbit 12 jam, pada ketinggian ± 20.200 km di atas permukaan bumi [4]. Pada setiap waktu, paling sedikit 4 satelit dapat diamati di setiap lokasi di permukaan bumi. Hal ini memungkinkan pengguna GPS untuk dapat menghitung posisi mereka di permukaan bumi.
2.1.1.3. Segmen Pengguna atau Pemakai
Segmen pengguna adalah para pengguna satelit GPS, dalam hal ini receiverGPS yang dapat menerima dan memproses sinyal yang dipancarkan oleh satelit GPS [3]. Receiver GPS yang dijual di pasaran saat ini cukup bervariasi, baik dari segi jenis, merek, harga, ketelitian yang diberikan, berat, ukuran maupun bentuknya. Ada beberapa cara yang dapat digunakan untuk mengklasifikasikan receiver GPS, yaitu antara lain berdasarkan fungsi, data yang direkam, jumlah kanal, ataupun penggunaannya.
Secara sederhanareceiverGPS untuk penentuan posisi dapat dibedakan tiga jenis, yaitu tipe navigasi, tipe pemetaan, dan tipe geodetik [3].ReceiverGPS tipe navigasi yang sering juga disebut tipe genggam (handheld receiver) mempunyai ketelitian yang lebih rendah dibandingkan tipe pemetaan dan geodetik (sampai orde 10m – 100m). Receiver tipe pemetaan dapat memberikan ketelitian posisi hingga orde 1m – 5m. Sedangkan receiver tipe geodetik adalah tipe yang paling dapat memberikan ketelitian posisi yang lebih tinggi hingga orde mm.
2.1.2. Sinyal
gelombang pembawa, yaitu L1 (1575.42 Mhz) dengan panjang gelombang ± 1,75cm, dan L2 (1227.60 Mhz) dengan panjang gelombang ± 2,25cm, berisi data kode, dan pesan navigasi [4], [6]. Pada dasarnya, sinyal GPS terdiri dari tiga komponen, yaitu pemberi informasi jarak (kode), pemberi informasi posisi satelit (navigation message), dan gelombang pembawa (carrier wave).
2.1.2.1. Informasi Jarak
Informasi jarak yang dikirimkan oleh satelit GPS berupa kode PRN (Pseudo Random Noise) [4]. Kode PRN itu terdiri dari dua buah, masing – masing terdiri dari kode-C/A (Coarse Acquisition/Clear Access) yang dimodulasikan pada gelombang pembawa L1 dan kode-P(Y) (Private) yang dimodulasikan baik pada gelombang pembawa L1 maupun L2. Kode P mempunyai beberapa kelebihan dibandingkan dengan kode C/A yaitu :
1. Presisi jarak yang diberikan lebih tinggi yaitu kode P = 0,3 m dan kode C/A = 3 m. 2. Efekmultipathuntuk kode P lebih kecil daripada kode C/A.
3. Kode P dimodulasikan pada dua gelombang pembawa L1 dan L2 sehingga efek bias ionosfer pada jarak hasil pengukuran dari satelit ke pengamat dapat diestimasi. Kedua kode tersebut disusun oleh rangkaian kombinasi bilangan-bilangan biner (0 dan 1). Setiap satelit GPS mempunyai struktur kode yang unik dan berbeda antara satu satelit dengan satelit lainnya yang memungkinkan receiverGPS untuk membedakan sinyal-sinyal yang datang dari satelit-satelit GPS yang berbeda. Sinyal - sinyal tersebut dapat dibedakan oleh receiver dengan menggunakan teknik yang dinamakan CDMA (Code Division Multiple Accsess).
Informasi jarak didapatkan dari dua besaran dasar yaitu pseudorange dancarrier beat phase. Pseudorangeadalah jarak hasil perhitungan olehreceiverGPS terhadap data ukuran waktu rambat sinyal satelit ke receiver. Pengukuran dilakukan dengan membandingkan kode yang diterima dari satelit dengan replika kode yang diformulasikan dalam receiver. Waktu yang digunakan untuk sinkronisasi kedua kode tersebut adalah waktu yang diperlukan oleh kode tersebut untuk menempuh jarak dari satelit ke pengamat. Gambar 2.2. menunjukkan cara penentuan jarak dengan kode. Jarak dari satelit ke pengamat dapat dihitung dengan persamaan [4] :
Jarak = C × dt (2.1)
Gambar 2.2. Penentuan jarak dengan kode [4]
Karena jam receiver tidak sinkron dengan jam satelit, jarak di atas masih terkontaminasi oleh kesalahan waktu. Oleh karena itu, jarak tersebut dinamakan pseudorange. Gambar 2.3. menunjukkan skema penentuan jarak dari pengamat ke satelit.
Gambar 2.3. Skema jarak ukuran dari pengamat ke satelit pada gelombang dalam waktu t [4]
Carrier beat phase adalah beda fase yang diukur oleh receiver GPS dengan cara mengurangkan fase sinyal pembawa yang datang dari satelit dengan sinyal serupa yang dibangkitkan dalam receiver. Jadi data fase pengamatan satelit GPS adalah jumlah gelombang penuh yang terhitung sejak saat pengamatan dimulai. Jarak dari satelit ke pengamat dapat dihitung dengan persamaan [4] :
Jarak = λ × (φ+N) (2.2)
dengan λ adalah panjang gelombang, Φ adalah jumlah fase sepanjang gelombang dalam
waktu t, dan N jumlah gelombang penuh yang tidak teramati.
gelombang. Jadi ketelitian jarak jika dihitung dengan menggunakan gelombang adalah sebagai berikut :
1. L1 = 1 % x 19 cm = 1,9 mm 2. L2 = 1 % x 24,4 cm = 2,4 mm
2.1.2.2. Informasi Posisi
Posisi yang diperoleh dari pengamatan GPS akan mengacu ke suatu datum global yang dinamakan World Geodetic System 1984 (WGS-84) [4]. WGS-84 adalah sistem informasi koordinat yang didefinisikan, direalisasikan, dan dipantau oleh National Imagery and Mapping (NIMA) Amerika Serikat, saat ini digunakan oleh sistem satelit navigasi GPS. Jadi setiap penentuan posisi di permukaan bumi akan menghasilkan koordinat pada satu sistem koordinat/datum.
Pesan navigasi yang dibawa oleh sinyal GPS terdiri dari informasi ephemeris (orbit) satelit, yang biasa disebut broadcast ephemeris. Broadcast ephemeristerdiri dari parameter waktu, parameter orbit satelit, dan parameter perturbasi atau gangguan yang terjadi pada orbit satelit. Parameter – parameter tersebut digunakan untuk menentukan koordinat dari satelit [4], [5]. Selain broadcast ephemeris, pesan navigasi juga berisi alamat satelit yang memberikan informasi tentang orbit nominal satelit yang berguna bagi receiver dalam proses akuisasi awal data satelit maupun bagi para pengguna dalam perencanaan waktu pengamatan yang optimal [4]. Informasi lain yang dibawa oleh pesan navigasi adalah koefisien koreksi jam satelit, parameter koreksi ionosfer, status konstelasi satelit, dan informasi kesehatan satelit.
Penentuan posisi receiver GPS dapat dihitung dengan cara pengamatan ke belakang. Dalam hal ini,receiverGPS harus mempunyai 2 data utama, yaitu :
1. Jarak antarareceiverGPS dengan setiap satelit GPS yang diamati. 2. Posisi / koordinat dari setiap satelit GPS yang diamati.
Jarak dari receiver GPS ke satelit GPS dapat dihitung dari sinyal yang diterima dari satelit GPS baik dari data kode (pseudorange) maupun dengan data fase (carrier beat phase). Sedangkan koordinat satelit GPS diperoleh dari informasi yang dikirimkan oleh satelit GPS tersebut bersama dengan sinyal yang diterima olehreceiverGPS.
ϑ, λ, h). Terdapat 2 metode penentuan posisi pada GPS, yaitu metode penentuan posisi secara Diferensial dan metode penentuan posisi secara Absolut.
2.1.2.2.1. Metode Penentuan Posisi secara Absolut
Penentuan posisi secara absolut adalah metode penentuan posisi yang paling mendasar dari GPS [4]. Metode ini hanya menggunakan satu receiver GPS untuk suatu posisi dan biasanya menggunakan receivertipe navigasi. Prinsip penentuan posisi adalah pengukuran jarak receiver GPS dengan beberapa satelit yang telah diketahui koordinatnya (minimal 4 satelit). Data yang digunakan adalah datapseudorange.
2.1.2.2.2. Metode Penentuan Posisi secara Diferensial
Pada penentuan posisi secara diferensial, posisi suatu titik ditentukan relatif terhadap titik lainnya yang telah diketahui koordinatnya [4]. Metode penentuan posisi secara diferensial menggunakan 2 buah receiver.Dengan mengurangkan data yang diamati oleh 2 receiver GPS pada waktu yang bersamaan, beberapa jenis kesalahan dan bias pengamatan dapat dieliminasi atau direduksi. Hal ini akan meningkatkan akurasi dan presisi dari koordinat yang diperoleh dibandingkan pada metode absolut.
2.1.2.3. Gelombang Pembawa
Kode dan pesan navigasi harus dimodulasikan terlebih dahulu pada gelombang pembawa (gelombang L1 dan L2), agar dapat mencapai pengamat. Teknik modulasi yang digunakan dalam sinyal GPS adalah BPSK (Binary Phase Shift Keying) [4].
2.1.3. Kesalahan dan Bias Pengamatan
2.1.3.1. Kesalahan Orbit
Kesalahan orbit adalah kesalahan yang terjadi pada saat data posisi orbit yang dilaporkan berbeda dengan posisi orbit satelit yang sebenarnya [4]. Data mengenai orbit satelit disebut ephemeris. Kesalahan orbit akan mempengaruhi ketelitian posisi titik-titik yang ditentukan.
2.1.3.2. Bias Ionosfer
Ionosfer akan mempengaruhi kecepatan, arah, dan polarisasi sinyal GPS [4]. Efek ionosfer yang terbesar adalah pada kecepatan sinyal. Dengan berubahnya kecepatan sinyal pada saat melewati ionosfer, jarak dari satelit ke pengamat yang diukur akan ikut berubah. Ionosfer akan memperbesar perbedaan fase gelombang dan memperlambat datangnya kode (pseudorange)yang dibawa oleh sinyal dari satelit ke pengamat.
2.1.3.3. Bias Troposfer
Ketika melewati troposfer, sinyal GPS akan mengalami refraksi yang menyebabkan perubahan kecepatan dan arah [4]. Hampir sama dengan yang terjadi pada bias ionosfer, bias ini mempengaruhi kecepatan sinyal, sehingga hasil pengukuran jarak juga akan mengalami kesalahan.
2.1.3.4. Multipath
Multipath adalah fenomena yang terjadi karena sinyal dari satelit tiba di antena GPS melalui dua atau lebih lintasan yang berbeda [4]. Perbedaan jarak tempuh menyebabkan sinyal yang ada saling berinterferensi. Bidang reflektor yang menyebabkan multipath bisa berupa bidang horisontal, vertikal atau miring, seperti jalan, gedung, permukaan air, dan kendaraan.
2.1.3.5. Cycle slip
2.1.3.6. Selective Availability
Selective availability adalah metode yang diaplikasikan oleh pihak militer Amerika Serikat agar ketelitian posisi yang relatif tinggi dari GPS hanya dapat diperoleh pihak – pihak yang diijinkan [4]. Selective availability diimplementasikan dengan menerapkan secara sengaja kesalahan ephemeris satelit dan jam satelit. Koreksi kesalahan tersebut hanya diketahui oleh pihak militer Amerika Serikat dan pihak yang diijinkan. Kebijakan selective availabilitydihapuskan oleh pihak militer Amerika Serikat sejak tahun 2000.
2.1.3.7. Anti Spoofing
Anti spoofing adalah suatu kebijaksanaan dari pihak militer Amerika Serikat untuk mencegah penggunaan kode P dari sinyal GPS yang telah diubah menjadi kode Y yang bersifat rahasia oleh pihak-pihak yang tidak dikehendaki [4]. Struktur kode Y hanya diketahui oleh pihak militer Amerika Serikat dan pihak - pihak yang diijinkan. Adanya anti spoofingmenyebabkan pihak pengguna biasa hanya dapat menerima kode C/A.
2.1.3.8. Ambiguitas Fase
Ambiguitas fase atau cycle ambiguity adalah jumlah gelombang (N) yang tidak teramati oleh receiver GPS [4]. Ambiguitas fase terjadi karena adanya gangguan pada sinyal dan dapat diketahui dengan pengamatan satelit GPS dengan menggunakan data fase.
2.1.4. Ketelitian Posisi GPS
Ketelitian posisi yang didapat dengan pengamatan GPS secara umum bergantung pada beberapa faktor [4]:
1. Ketelitian data yang digunakan (tergantung dari tipe data, kualitas/ tipe receiver serta tingkat kesalahan, dan bias pengamatan).
2. Geometri satelit yang diamati.
3. Metode penentuan posisi yang digunakan. 4. Strategi pemrosesan data.
Tabel 2.1. Ketelitian dari metode penentuan posisi secara absolut dan diferensial [4]
Absolut Diferensial
Tipe data dan
keadaan
ketelitian Tipe data dan
keaadan
2.1.5. Format data GPS
Format data yang paling banyak digunakan receiver GPS adalah format data NMEA 0183, yang sudah ditetapkan oleh National Marine Electronic Associations (NMEA) [7]. Data ini dapat diidentifikasi dengan aplikasi Hyperterminal. Data keluaran dalam format NMEA 0183 berbentuk kalimat (string) yang merupakan karakter rangkaian ASCII [6]. Setiap kalimat diawali dengan tanda ‘$’, dua karakter Talker ID, tiga karakterSentence ID dan diikuti oleh data fileds yang masing-masing dipisahkan oleh koma serta diakhiri oleh optional cheksumdan karaktercariage return/line feed(CR/LF).
Format dasar keluaran NMEA 0183 :
$aaccc,c—c*hh<CR><LF>
“hh” adalah optional cheksum untuk pengecekan kesalahan (error) kalimat, dan “<CR><LF>” adalahcarriage return/line feed yang menandakan akhir dari kalimat. Jenis-jenis informasi (sentenceID) ditunjukkan pada Tabel 2.2. [7].
Tabel 2.2. Jenis - jenis informasi (sentenceID) [7] Sentence
ID Keterangan Penjelasan
$GPALM GPSalmanac data Berisi informasi almanak
$GPGGA GPSfix data Informasi lokasi dan ketelitian dari informasi $GPGLL GPSantenna position
data
Berisi data posisireceiverdalam lintang dan bujur, informasi waktu, dan tanggal $GPGRS GPSrange residuals
$GPGSA
GPSDOP (dilution of precision) and active
satellites
Status ketelitian data koordinat
$GPGST GPSpseudorange
statistics Berisi informasi nilainoisepadapseudorange $GPGSV GPSsatellites in view Berisi informasi jumlah dan nomor satelit yang
mengirimkan gelombang kereceiverGPS $GPMSS Beacon receiver signal
status Status sinyal yang dikirimkan dari pusat kontrol
$GPRMC Recommended minimum specificGPSdata
Informasi posisi minimum GPS. terdiri dari informasi waktu, tanggal, kecepatan, Namun
tidak terdapat informasi lintang, dan bujur $GPVTG Course over ground and
ground speed
Berisi informasi kecepatan dan ketelitian dari informasi kecepatan
$GPZDA GPStime and date Berisi informasi waktu
Contoh data keluaran GPS :
$GPLL,4717.115,N,00833.912,E,130305.0,A*32<CR><LF> GGL = Inisialisasi data
130305.0 = Posisi waktu UTC :13 jam 03menit 05.0detik 4717.115 = Garis lintang : 47°17.115 min
N = Lintang utara (N=north, S=south) 00833.912 = Garis bujur : 8°33.912 min
E = Garis bujur timur (E=east, W=west)
32 = Pengecekan seluruh set data yang diperiksa
2.2. Sistem Informasi Geografis
Sistem Informasi Geografis (SIG) diartikan sebagai suatu komponen yang terdiri dari perangkat keras, perangkat lunak, data geografis, dan sumberdaya manusia yang bekerja bersama secara efektif untuk menangkap, menyimpan, memperbaiki, memperbaharui, mengelola, memanipulasi, mengintegrasikan, menganalisa, dan menampilkan data dalam suatu informasi berbasis geografis [8]. Informasi spasial memakai lokasi, dalam suatu sistem koordinat tertentu, sebagai dasar referensinya.
SIG dapat didefinisikan sebagai suatu sistem yang terdiri dari berbagai komponen yang tidak dapat berdiri sendiri-sendiri. Sebagaimana sistem komputer pada umumnya, SIG hanyalah sebuah alat yang mempunyai kemampuan khusus. Kemampuan sumber daya manusia untuk memformulasikan persoalan dan menganalisa hasil akhir sangat berperan dalam keberhasilan sistem SIG. Berdasarkan fungsinya SIG mempunyai kemampuan sebagai berikut [10]:
1. Pemasukan data
SIG dapat mengubah format data dari format eksistingnya (orthofoto dan citra satelit) menjadi format data digital yang dapat diproses dengan SIG. Pemasukan data menjadi bentuk digital dapat melaluiscanner, keyboard,mouse, ataudigitizer. 2. Pengolahan data (dataprocessing)
SIG dapat mengolah data yang telah disimpan sebelumnya menjadi informasi yang dapat digunakan untuk keperluan tertentu.
3. Memanipulasi dan analisis data
4. Pencetakan data (dataprinting)
Data SIG yang telah diolah menjadi informasi dapat dicetak atau ditampilkan denganaudio visualkomputer.
2.3. Peta
Peta adalah gambaran sebagian atau seluruh muka bumi baik yang terletak di atas maupun di bawah permukaan dan disajikan pada bidang datar pada skala dan proyeksi tertentu (secara matematis). Karena dibatasi oleh skala dan proyeksi, peta tidak akan pernah selengkap dan sedetail aslinya (bumi), karena itu diperlukan penyederhanaan dan pemilihan unsur yang akan ditampilkan pada peta [11].
2.3.1. Peta Khusus atau Tematik
Disebut peta khusus atau tematik karena peta tersebut hanya menggambarkan satu atau dua kenampakan pada permukaan bumi yang ingin ditampilkan [11]. Dengan kata lain, yang ditampilkan berdasarkan tema tertentu. Peta khusus adalah peta yang menggambarkan kenampakan-kenampakan (fenomena geosfer) tertentu, baik kondisi fisik maupun sosial budaya. Contoh peta khusus/ tematik: peta curah hujan, peta kepadatan penduduk, peta penyebaran hasil pertanian, peta penyebaran hasil tambang, dan chart (peta jalur penerbangan atau pelayaran). Peta tematik ditunjukkan pada Gambar 2.4.
2.3.2. Fungsi Peta
Peta dapat digunakan untuk mengetahui atau menentukan lokasi yang dicari, walaupun belum pernah mengunjungi tempat tersebut [11]. Secara umum fungsi peta dapat disimpulkan sebagai berikut:
1. Menunjukkan posisi atau lokasi suatu tempat di permukaan bumi.
2. Memperlihatkan ukuran (luas, jarak) dan arah suatu tempat di permukaan bumi. 3. Menggambarkan bentuk-bentuk di permukaan bumi, seperti benua, negara, gunung,
sungai, dan bentuk-bentuk lainnya.
4. Membantu peneliti sebelum melakukan survei untuk mengetahui kondisi daerah yang akan diteliti.
5. Menyajikan data tentang potensi suatu wilayah. 6. Alat analisis untuk mendapatkan suatu kesimpulan. 7. Alat untuk menjelaskan rencana-rencana yang diajukan.
8. Alat untuk mempelajari hubungan timbal-balik antara fenomena-fenomena (gejala-gejala) geografi di permukaan bumi.
2.4. Peta Digital
Peta digital merupakan proses konversi dari peta analog menjadi peta digital dengan mempergunakan meja digitasi [8]. Cara kerjanya adalah dengan mengkonversi fitur-fitur spasial yang ada pada peta menjadi kumpulan koordinat x, y. Untuk menghasilkan data yang akurat, dibutuhkan sumber peta analog dengan kualitas tinggi. Gambar 2.5. menjelaskan proses digitasi.
2.4.1. Data Peta Digital
Data pada peta digital terdiri dari data spatial, data tabular, dan data gambar [8]. Data-data tersebut digunakan sebagai informasi dalam digitalisasi peta.
2.4.1.1. Data Spasial
Data spasial mempunyai dua bagian penting yang membuatnya berbeda yaitu informasi lokasi dan informasi atribut yang dapat dijelaskan sebagai berikut [8]:
1. Informasi lokasi atau informasi spasial.
Contoh umum adalah informasi lintang dan bujur, termasuk diantaranya informasi datum dan proyeksi.
2. Informasi deskriptif (atribut) atau informasi non spasial. Suatu lokalitas bisa mempunyai beberapa atribut atau properti yang berkaitan. Contohnya jenis vegetasi, populasi, pendapatan per tahun, dsb.
Data spasial dapat direpresentasikan dalam dua format, yaitu vektor dan raster. 1. Vektor
Vektor merupakan peta yang dibangun dari penggabungan berbagai titik acuan yang kemudian melalui perhitungan-perhitungan khusus, titik tersebut akan saling dihubungkan membentuk suatu garis atau pola tertentu. Data format vektor, bumi direpresentasikan sebagai suatu mosaik dari garis (arc/line), polygon (daerah yang dibatasi oleh garis yang berawal dan berakhir pada titik yang sama), dan titik/point (node yang mempunyai label) dannodes(titik perpotongan antara dua buah garis) yang ditunjukkan pada Gambar 2.6.
Keuntungan utama dari format data vektor adalah ketepatan dalam merepresentasikan fitur titik, batasan, dan garis lurus. Kelemahan data vektor yang utama adalah ketidakmampuannya dalam mengakomodasi perubahan gradual [8].
2. Raster
Data raster atau sel grid adalah data yang dihasilkan dari sistem penginderaan jauh. Pada data raster, obyek geografis direpresentasikan sebagai struktur sel grid yang disebut dengan pixel (picture element) [8]. Pada data raster, resolusi (definisi visual) tergantung pada ukuran pixel. Dengan kata lain, resolusipixel menggambarkan ukuran sebenarnya di permukaan bumi yang diwakili oleh setiap pixel pada citra. Semakin kecil ukuran permukaan bumi yang direpresentasikan oleh satu sel, semakin tinggi resolusinya. Data raster sangat baik untuk merepresentasikan batas-batas yang berubah secara gradual, seperti jenis tanah, kelembaban tanah, vegetasi, dan suhu tanah.
Gambar 2.7. Data Raster [8]
Perbedaan antara data vektor dengan data raster yaitu, data vektor relatif lebih ekonomis dalam hal ukuran file dan presisi dalam lokasi, tetapi sangat sulit untuk digunakan dalam komputasi matematik. Sebaliknya, data raster biasanya membutuhkan ruang penyimpanan file yang lebih besar dan presisi lokasinya lebih rendah, tetapi lebih mudah digunakan secara matematis.
2.4.1.2.
Image
Data
2.4.1.3. Sistem Tampilan Data
Sistem tampilan data menggunakan perangkat lunak pemetaan digital. Data spasial disajikan dengan konsep layer data dan atribut, yaitu representasi data spasial menjadi sekumpulan peta tematik yang berdiri sendiri-sendiri sesuai dengan tema masing-masing, tetapi terikat dalam suatu kesamaan lokasi. Keuntungan dari konsep data layer adalah mudahnya proses penelusuran dan analisa spasial serta efisiensi pengelolaan data [8].
Gambar 2.8. Konsep Layer [8]
Terminologiyang digunakan antara lain [8] :
1. Theme, adalah sebuah layer grafis yang memuat kumpulan fitur geografis dan informasi atribut. Sebuah theme biasa memuat informasi geografis dengan tema tertentu untuk sebuah tipe fitur tunggal. Bisa berupa vektor ataupun citra (contoh: SUNGAI.SHP, LCOVER_GRD, dan sebagainya.).
2. Table, adalah sebuahfiledata yang berisi informasi atribut dari suatu fitur geografis dalam bentuk tabel. Kolom memuat atribut dan baris memuat record.Tableadalah file dalam format TXT atau DBF yang mempunyai kolom yang bisa digabungkan dengantheme(contoh: KOORDINAT.TXT, PENDUDUK.DBF).
3. View, adalah sebuah tempat theme ditampilkan. Bila View memuat lebih dari satu theme, maka themetersebut akan ditampilkan secara berurutan dari bawah ke atas. Komposisi peta yang ditampilkan merupakan hasiloverlaydari beberapatheme. 4. Layout, adalah sebuah tempat untuk merancang output peta yang akan dibuat.
Layout digunakan untuk menyusun view dan mengatur letak obyek (legend, scale bar, dan sebagainya.) sesuai dengan keinginan sebelum mencetak.
2.5. Sistem Koordinat dan Proyeksi
Koordinat peta adalah perpotongan antara garis bujur dan garis lintang. Sistem koordinat merupakan kesempatan tata cara menentukan posisi suatu tempat di muka bumi ini. Dengan adanya sistem koordinat, masyarakat menjadi saling memahami posisi masing-masing di permukaan bumi. Posisi wilayah Indonesia di permukaan bumi terletak pada koordinat 9° bujur timur (BT) di pulau Weh, Aceh sampai dengan 141° bujur timur (BT) di merauke, papua, dan 6° lintang utara (LU) serta 11° lintang selatan (LS) [11].
Suatu sistem penggambaran yang merepresentasikan keadaan bumi sebenarnya yang disebut sebagai proyeksi digunakan untuk menggambarkan obyek atau fitur permukaan bumi di atas layar komputer. Proyeksi digambarkan dalam sistem koordinat Cartesian, yang umumnya dikenal dalam unit x dan y [9]. Saat ini terdapat dua sistem koordinat yang biasa digunakan di Indonesia, yaitu sistem koordinat bujur-lintang dan sistem koordinat UTM (Universal Transverse Mercator) [12].
2.5.1. Sistem Koordinat Bujur-Lintang (
Longitude - Latitude)
Sistem koordinat bujur-lintang (Longitude-Latitude), yang terdiri dari dua komponen yang menentukan yaitu, garis dari atas ke bawah (Vertikal) yang menghubungkan kutub utara dengan kutub selatan bumi disebut garis lintang (Latitude) atau titik y. Garis mendatar (horisontal) yang sejajar dengan garis khatulistiwa, disebut juga garis bujur (Longitude) atau titik x [12].
Gambar 2.9. Koordinat Bujur-Lintang [12]
sebuah garis prime meridianyang terletak di kota Greenwich(Inggris). Letak semua garis lintang, garis bujur, garis equator, dan meridian ditunjukkan pada Gambar 2.9. Satuan unit yang digunakan adalah degree (derajat atau °). Satuan derajat ini dilambangkan dengan satuan decimal degree, DMS (degree minute second), dan DM (Degree minute decimals) [9].
2.5.2. Sistem Koordinat
Universal Transverse Mercator
(UTM)
Proyeksi Universal Transverse Mercator digunakan untuk menyatakan proyeksi yang lebih detail dan bersifat lokal [10]. Seluruh wilayah yang di permukaan bumi dibagi menjadi 60 zona bujur. Zona 1 dimulai dari lautan teduh (pertemuan antara garis 180 bujur barat dan 180 bujur timur) menuju ke timur dan terakhir di tempat berawalnya zona 1. Masing-masing zona bujur memiliki lebar 6° atau sekitar 667 kilometer. Satuan unit yang digunakan adalah meter [12].
Zona bujur dapat digunakan untuk menentukan koordinat di dalam peta dalam garis bujur UTM. Semua pusat (sumbu utama) zona UTM terletak pada koordinat 500.000 m (meter) East (timur). Gambar 2.10. menunjukkan bahwa sebelah kiri (barat) pusat zona terletak secara berurutan 400.000mT, 300.000 mT, 200.000 mT, dan 100.000 mT. Sebelah kanan (timur) pusat zona terdapat beberapa koordinat secara berurutan 600.000, 700.000, 800.000, dan seterusnya.
Gambar 2.10. Zona Bujur [12] Gambar 2.11. Zona Lintang [12]
UTM WGS 1984 digunakan untuk wilayah Indonesia. Sistem proyeksi UTM WGS 1984 Zone 48S yang ditunjukkan pada Gambar 2.12 digunakan untuk menyatakan sistem proyeksi untuk daerah Bandung yang terletak di (107°, -6°). Perhitungan data yang
digunakan adalah dalam satuan meter. Primary koordinat UTM dimulai dari dua tempat, yaitu dari titik tengahequatordan dari titik pertama di selatanequator(80°), sehingga nilai koordinat UTM umumnya hingga ratusan ribu dalam axis dan jutaan dalam ordinat [8].
Gambar 2.12. Proyeksi UTM WGS 1984 Zone 48S [9]
Zone pada tiap daerah berbeda sehingga satu unit zone sistem yang berlaku di daerah tidak bisa digunakan pada daerah lain. Zone UTM yang berlaku adalah seperti pada Gambar 2.13. untuk Indonesia. Proyeksi seperti mercator, robinson, dan lain sebagainya tergantung karakteristik posisi merdian dan paralel tiap daerah/negara, dapat digunakan untuk menyatakan satuan meter ataufeetpada peta yang berlaku global [9].
2.5.3. Sistem Konversi
satuan Geodasi
ke UTM (
Universal tranverse
Mercator
)
Pada tanggal 7 Agustus 1996, RM. Toms menemukan algoritma baru untuk konversi satuan Geodasi ke UTM yang efektif [13]. Rumus konversi satuan Geodasi ke UTM menurut RM.Toms sebagai berikut:
Rumus konversi dari bujur ke koordinat X:
………(2.3)
Rumus konversi dari lintang ke koordinat Y :
) ………..………... (2.4)
dengan A = (lon - lon0).Cos (lat), T = tan(lat)2, dan C =Eps.cos(lat)2
Keterangan:
Lon =longitudedalam radian = Lat =latitudedalam radian =
a = semi mayor poros bumi = 6.378.137 FE = awal absis = 500.000
FN = awal ordinat = 10.000.000
k0 = factor skala pada meridian tengah = 0,9996 e =eccentricity= 0,081819191
Eps = persamaan kuadrat eccentricity= 0,006739496768 Lon0 = referensilongitudeuntuk zona pada meridian pusat
=( x 6 + 3, hasil (
)
dibulatkan ke bawah Lon0 = referensilongitudedalam radian=
M = jarak sebenarnya antara garis bujur dengan garis khatulistiwa
=
{(
1 lat sin(2lat)sin(4lat) sin (6lat)
2.6.
Universal Serial Bus
(USB)
Universal Serial Bus(USB) adalahport yang sangat diandalkan saat ini dengan bentuk yang kecil dan kecepatan data yang tinggi. Saat ini transfer data menggunakan port USB sudah semakin marak. Port USB menjadi pilihan utama karena ukuran yang ringkas dan kecepatan transfer data yang cukup besar [14].
Konektor USB hanya ada 2 macam, yakni konektor typeA dan konektortypeB seperti terlihat dalam Gambar. 2.14. Konektor type A dipakai untuk menghubungkan kabel USB ke terminal USB yang ada pada bagian belakang komputer produksi berapa tahun terakhir ini. KonektortypeB dipakai untuk menghubungkan kabel USB ke terminal USB yang ada pada peralatan. Peralatan USB yang sederhana misalnya mouse, biasanya tidak memakai konektor B. Kabel langsung dihubungkan ke bagian dalam mouseuntuk menghemat biaya [14].
Gambar 2.14. Konektor tipe A dan Konektor tipe B [15]
USB mendukung tiga macam kecepatan transmisi data, yaitu [14]: a. USB versi 1.1 mode kecepatan rendah 1.5 Mbits/s
b. USB versi 1.1 mode kecepatan penuh 12Mbits/s
2.7.
Driver
USB Untuk Pemograman
Visual
Driver adalah suatu file yang berextensi .inf yang fungsinya untuk membuathardware yang dipasang dapat berjalan atau bekerja [17]. Selain itu, driver merupakan penghubung antarasoftware denganhardware,jika tidak adadrivermaka tidak akan tercipta hubungan antara software dengan hardware [18]. Jadi driver USB untuk pemograman visual adalah perangkat lunak yang digunakan untuk menghubungkan pemograman visual dengan perangkat USB.
2.8. Pemograman
Visual
Visual merupakan bahasa pemrograman yang sangat mudah dipelajari, dengan teknik pemrograman visual yang memungkinkan penggunanya untuk berkreasi lebih baik dalam menghasilkan suatu program aplikasi [16]. Ini terlihat dari dasar pembuatan visual adalah FORM, pengguna dapat mengatur tampilan form kemudian dijalankan dalam script yang sangat mudah. Hal ini juga ditunjang dengan teknik pemrograman di dalam visual yang mengadopsi dua macam jenis pemrograman yaitu pemrograman Visual dan Object Oriented Programming(OOP).
Interface Visual berisi menu, toolbar, toolbox, form, project explorer, dan property seperti terlihat pada Gambar 2.15.
Gambar 2.15.Interface Visual[16]
diperlukan. Form disusun oleh komponen-komponen yang berada di Toolbox dan setiap komponen yang dipakai harus diatur propertinya lewat jendelaProperty.
Menu pada dasarnya adalah operasional standar di dalam sistem operasi windows, seperti membuat form baru, membuat project baru, membuka project, dan menyimpan project. Di samping itu terdapat fasilitas-fasilitas pemakaianvisualpada menu [16].
Toolbox berisi komponen-komponen yang bisa digunakan oleh suatu project aktif, artinya isi komponen dalam toolbox sangat tergantung pada jenis project yang dibangun. Adapun komponen standar dalamtoolboxdapat dilihat pada Gambar 2.16.
27
BAB III
RANCANGAN PENELITIAN
Program pemetaan lokasi terdiri dari konversi bujur dan lintang ke sistem koordinat x
dan y pada peta digital yang terdiri dari tigalayer yaitu peta dasar, peta pemancar, dan peta
pengukuran. Pembuatan tampilan, pengolahan data, dan koneksi terhadap GPS
menggunakan pemogramanvisualdan perangkat lunak basis data.
3.1. Algoritma Sistem Keseluruhan
Sinyal gelombang radio dipancarkan oleh pemancar FM melalui antena lewat udara.
Data yang diambil oleh GPS adalah gelombang radio yang dikirimkan oleh satelit melalui
udara. Sinyal gelombang radio dari pemancar radio kemudian diterima oleh antena
penerima yang terhubung dengan Spectrum Analyzer (SPA) melalui kabel koaxial. Selain
itu, antena penerima ini juga terhubung dengan field strength meter (FSM). Ketiga alat
pengukur yaitu SPA, FSM, dan GPS kemudian dihubungkan dengan komputer
menggunakan kabel serial. Hasil pengukuran dari alat ukur tidak dapat langsung diproses
komputer sehingga dibutuhkan penyesuaian format data (konversi).
Gambar 3.1. Diagram Blok Sistem Keseluruhan
Transmitter
Antena
Visual / pemetaan
Satelit
Field Strength
Meter Spectrum
Analyzer
Database
GPS Gelombang radio Antena
Gelombang radio
Antena Antena
Karena adanya perbedaan format data dari ketiga alat ukur yang digunakan,maka
data-data yang ada dikumpulkan menjadi satu dalam sebuah basis data-data. Kemudian dari basis
data tersebut akan dikelompokkan lagi dalam tabel-tabel tertentu sesuai kebutuhan. Setelah
adanya klasifikasi, maka data yang ada akan digunakan menurut kebutuhannya
masing-masing sehingga mampu dipresentasikan ke dalam visual (pemetaan). Jika ada data yang
ingin dipergunakan, maka pengguna dapat memilih sendiri sesuai kebutuhannya dengan
menekan salah satu menu yang sudah tersedia. Basis data dan visual ini terdapat dalam
programvisualkomputer.
Diagram blok sistem keseluruhan ditunjukkan pada Gambar 3.1. blok yang dibatasi
dengan garis putus - putus pada Gambar 3.1. merupakan blok pengawasan yang
menggunakan perangkat GPS dari sistem keseluruhan. Pada blok ini, GPS menerima sinyal
dari satelit dan memberikan data posisi ke komputer, sedangkan data alamat dan frekuensi
dari stasiun radio digunakan oleh administrator. Komputer akan mengolah data posisi
kemudian menampilkannya dalam peta digital dan tabel data stasiun radio. Hasil
pengolahan komputer akan memberikan informasi posisi bujur, lintang, koordinat x-y, dan
arah dari stasiun radio tertentu. Data ini kemudian disimpan dalam basis data yang
selanjutnya disatukan dengan program SIG.
3.2. Prosedur Pengawasan Posisi
Saat pengawasan dilakukan, program akan membuka basis data untuk menyimpan data
yang diperoleh dari GPS. Setelah membuka basis data, akan dilanjutkan dengan inisialisasi
GPS, artinya persiapan perangkat GPS. Persiapan GPS terdiri dari menyalakan GPS,
mengeset GPS, dan mengetes GPS. Setelah persiapan GPS dilanjutkan dengan proses
koneksi. Jika proses koneksi berjalan lancar, maka data posisi dari GPS dapat diambil
dengan sempurna. Data posisi yang diambil yaitu data bujur dan lintang. Setelah data ini
didapatkan, akan dilanjutkan dengan proses konversi ke bentuk koordinat x dan y.
Proses konversi menghasilkan data koordinat x dan y yang selanjutnya disimpan ke
basis data. Data posisi yang telah tersimpan dalam basis data kemudian akan ditampilkan
dalam peta digital. Jika proses pengawasan akan dilakukan lagi, maka program akan
kembali ke proses awal yaitu pengiriman data. Sebaliknya, jika proses pengawasan akan
dihentikan, maka koneksi GPS ke PC akan diputuskan. Diagram alir pengawasan posisi
Gambar 3.2. Diagram Alir Pengawasan Posisi
3.2.1. Diagram Alir Koneksi
Koneksi yaitu mengendalikan penerimaan data dari GPS ke komputer. Koneksi antara
GPS ke komputer menggunakan kabel USB (Universal Serial Bus). Proses koneksi diawali
dengan pendeteksian status koneksi GPS dengan PC yaitu memilihportdari program. Jika
GPS terhubung , maka label berwarna biru berubah menjadi warna merah. Sedangkan jika
GPS belum terhubung, maka label berwarna biru tidak berubah atau tetap. Selanjutnya,
memilih nama GPS yang digunakan. Memilih nama GPS berarti GPS telah telah terhubung
dengan komputer. Langkah akhir, dilanjutkan dengan memilih perintah dari program
menghubungkan GPS. Menghungkan GPS berarti menghubungkan GPS dengan program.
Gambar 3.3. Diagram alir koneksi
3.2.2. Diagram Alir Pengambilan Data Posisi dari GPS
Proses pengambilan data bujur dan lintang dapat diperoleh jika GPS sudah terhubung
dengan PC. Tipe data yang diambil dari GPS adalah String. Apabila data posisi yang
diambil sudah terpenuhi, maka program dapat dihentikan. Jika belum terpenuhi, maka
program akan mengambil data posisi kembali. Diagram alir pengambilan data posisi dari
GPS ditunjukkan pada Gambar 3.4.
Format data GPS ditampilkan dalam urutan sebagai berikut :
$ G P L L , d d m m . m m m , N , d d d m m . m m m
, W , h h m m s s , Status , Mode
Proses ambil data meliputi proses pembacaan data yang terdiri dari memotong data
yang dibutuhkan. Untuk mendapatkan data lintang dilakukan pemotongan data pada bit ke
7 sampai 14, sedangkan data bujur didapatkan dengan pemotongan data pada bit ke 18
sampai 26. Dengan format data yang digunakan pada urutan di atas dapat terlihat jelas
pemotongan tiap data. Bit 1 berisi tanda $ yang diikuti dengan bit penunjuk ID GPS
(’GPLL’). Setelah itu diikuti dengan data lintang dan penunjuk arah bujur pada bit ke-16.
Selanjutnya, dari bit ke 18 sampai 26 berisi data lintang yang diikuti penunjuk arah bujur
pada bit ke 28. Setelah penunjuk arah bujur, data GPS akan berisi data waktu, status (valid
Gambar 3.4. Diagram Alir Pengambilan Data posisi dari GPS
3.2.3. Diagram Alir Konversi
Konversi berfungsi sebagai representasi dari data posisi GPS diwujudkan dalam sebuah
titik koordinat. Proses konversi ini mengacu pada persamaan 2.3 dan 2.4. Data posisi
terdiri dari data bujur (ddmm.mmm) dan lintang (dddmm.mmm). Data ini kemudian akan
dikonversi ke dalam koordinat x dan y dengan format text (.txt). Karena data bujur dan
lintang yang diperoleh GPS merupakan data string, sehingga harus dikonversi menjadi
format text. Setelah proses konversi, data posisi kemudian akan disimpan ke basis data.
Proses konversi ini akan terus dilakukan sampai ada perintah berhenti. Diagram alir
konversi ditunjukkan pada Gambar 3.5.
3.2.4. Diagram Alir Penyimpanan Basis Data
Penyimpanan basis data berfungsi untuk menyimpan data posisi. Ada tujuh data
yang akan disimpan yaitu: ID, data lintang, bujur, arah lintang, arah bujur, koordinat x,
dan koordinat y. Data lintang disimpan dalam format data dddmm.mmm sedangkan data
bujur disimpan dalam format data ddmm.mmm. Setelah proses konversi, data bujur dan
lintang akan menjadi data koordinat x dan y dengan format data txt. Diagram alir
penyimpanan basis data ditunjukkan pada Gambar 3.6.
Gambar 3.6. Diagram Alir Penyimpanan Basis Data
3.2.5. Diagram Alir Penampil Peta Digital
Peta digital terdiri dari tigalayeryaitu peta dasar, peta pemancar, dan peta pengukuran.
Peta dasar yaitu peta yang memperlihatkan gambar suatu daerah. Untuk membedakan tiap
kecamatan diberi warna yang berbeda. Peta pemancar yaitu peta yang memunculkan lokasi
stasiun pemancar yang berada di suatu daerah. Dalam perancangan ini, daerah yang
dibahas adalah D. I. Yogyakarta. Peta pengukur adalah peta yang menunjukkan lokasi
Gambar 3.7. Diagram Alir Penampil Peta Digital
Dalam perancangan program, peta dapat dimunculkan dengan memilih checkboxyang
akan mengubah status visible dari image peta. Diagram alir penampil peta digital
ditunjukkan pada Gambar 3.7. Jika memilih peta dasar maka akan muncullayerpeta dasar.
Jika tidak memilih peta dasar dapat memilih peta pemancar. Jika memilih peta pemancar
maka akan muncul layer peta pemancar. Jika tidak memilih peta pemancar, maka dapat
memilih peta pengukur. Setelah itu, jika memilih peta pengukur akan muncul peta
pengukur. Sedangkan jika tidak memilih ketiga pilihan tersebut, maka program akan
kembali ke proses awal.
Peta digital yang digunakan adalah peta digital dalam format .SHP (ESRI Shape File).
Dalam format SHP, peta digital dapat ditampilkan dalam perangkat lunak yang dibuat
menggunakan pemogramanvisual.
3.3. Perancangan Basis Data
Proses dimulai dengan membuat basis data baru, selanjutnya menyimpan file basis
(Field name) dan format data (data type). Dalam perancangan ini, dibuat 11 buah kolom
yaitu : NoGPS, Time, nama radio, frekuensi, alamat, lintang, bujur, Arah lintang, Arah
bujur, koordinat x, dan koordinat y. Bujur dan lintang merupakan data bujur dan lintang
dari GPS. Arah merupakan arah bujur dan lintang. Koordinat x dan y adalah hasil konversi
dari nilai lintang dan bujur. NoGPS antara GPS pemancar dan GPS pengukuran berbeda
terletak pada nomor yang tidak sama. Tabel kolom yang dibuat dalam basis data
ditunjukkan pada Tabel 3.1.
Tabel 3.1. Tabel kolom dalam basis data
NamaField Tipe Data Keterangan
NoGPS Number Memberi nomor pada Data GPS
Time Number Memberi nomor pada
Lintang Number Derajat garis lintang
Arah Lintang Text Arah garis lintang
Bujur Number Derajat garis bujur
Arah Bujur Text Arah garis bujur
X Number Konversi dari Lintang
Y Number Konversi dari Bujur
3.4. Diagram Alir Tampilan Program
Tampilan utama terdiri dari 2 menu utama yang ditampilkan dalam 2 tabstrib yaitu :
tabstrip lokasi pemancar dan tabstrip lokasi pengukuran. Diagram alir tampilan program
ini menggunakan pemogramanvisual.
Diagram alir tampilan program ditunjukkan pada Gambar 3.8. Jika memilih lokasi
pemancar, maka akan muncul form lokasi pemancar, dilanjutkan ke proses pemilihan
lokasi pengukuran. Apabila tidak memilih dapat diteruskan dengan memilih lokasi
pengukuran. Untuk lokasi pengukuran juga sama, jika memilih lokasi pengukuran maka
Gambar 3.8. Diagram Alir Tampilan Program
3.4.1. Tampilan Lokasi Pemancar
Pada tampilan lokasi pemancar terdapat pilihan yaitu ID, simpan, cetak, keluar,
koneksi, posisi, data pemancar, alamat, dan peta digital. Tampilan lokasi pemancar
digunakan untuk pengukuran pemancar dari stasiun radio. Gambar 3.9. adalah diagram alir
tampilan lokasi di daerah pemancar.
Gambar 3.10. Tampilan Lokasi Pemancar
Keterangan Gambar 3.10.
1. Commandbutton berfungsi menjalankan perintah ketika button ditekan.
Commandbutton ada 6 terdiri dari simpan, cetak, keluar, menghubungkan ke GPS,
hubungan diputuskan dan ambil data, koneksi, dan konversi.
2. Combobox adalah sebuah komponen yang berfungsi memberikan pilihan. Posisi
pengawasan menggunakan sebuah combobox untuk memilih GPS yang akan
dikoneksikan dengan PC, port, dan nama radio.
3.
Textbox adalah sebuah komponen yang berfungsi untuk menampilkan danmemasukkan data dalam bentuk text. Textbox terdiri dari data lintang, bujur, x, y,
time,dan alamat.
4. Tabstripberfungsi menampilkan komponen yang berbeda pada tab yang sama.
Tabstribyaitu lokasi pemancar.
5. Vscrollbar berfungsi untuk membuat objek batang gulung dengan arah tegak.
Vscrollbarterdiri dari nama radio. 8
7 6 5
1 2 3 4
6. Frame berfungsi untuk memisahkan mengkelompokkan menu pada program.
Frame terdiri dari pemilihan peta digital, lokasi pengukuran, posisi, dan peta
digital.
7. Checkbox dugunakan untuk melakukan pemilihan yang lebih dari satu dalam satu
group pilihan seperti peta digital yaitu: peta dasar, peta pemancar, dan peta
pengukur.
8. Mapobjectmemuat peta dasar, peta pemancar, dan peta pengukur.
9. Datagridadalah tabel yang digunakan untuk menampilkan tabel posisi basis data.
3.4.2. Tampilan Lokasi Pengukuran
Form lokasi pengukuran terdiri dari simpan, cetak, keluar, GPS terhubung, hubungan
diputuskan, ambil data, koneksi, posisi, posisi data, ID, nama pengukuran, nama pemancar,
alamat, dan peta digital.
Perbedaan antara Gambar 3.10. dengan Gambar 3.12. yaitu pada masukkan data. Jika
pada Gambar 3.10. masukan data yaitu data pemancar atau nama pemancar, sedangkan
Gambar 3.12. adalah data pengukuran atau daerah layanan. Selain itu, terdapat juga nama
pemancar ditampilan lokasi pengukuran digunakan untuk meninjau seberapa besar
jangkuan dari stasiun radio pada setiap daerah layanan atau pengukuran. Gambar 3.11.
diagram alir lokasi pengukuran adalah cara kerja dari pengukuran di daerah layanan.
Gambar 3.12 Tampilan Lokasi Pengukuran
Keterangan Gambar 3.12
1. Commandbutton berfungsi menjalankan perintah ketika button ditekan.
Commandbutton ada 6 terdiri dari simpan, cetak, keluar, menghubungkan ke GPS,
hubungan diputuskan, dan ambil data.
2. Combobox adalah sebuah komponen yang berfungsi memberikan pilihan. Posisi
Pengawasan menggunakan sebuah combobox untuk memilih GPS yang akan
dikoneksikan dengan PC danport.
3. Textbox adalah sebuah komponen yang berfungsi untuk menampilkan dan
memasukkan data dalam bentuk text. Textbox terdiri dari data lintang, bujur, x, y,
arah lintang, arah bujur, time,ID, nama radio, nama pengukuran, dan alamat.
4. Tabstrip berfungsi menampilkan komponen yang berbeda pada tab yang sama
yaitu: lokasi pengukuran.
5. Vscrollbar berfungsi untuk membuat objek batang gulung dengan arah tegak.
Vscrollbarterdiri dari nama radio.
8
7 6 5
1 2 3 4
6. Frame berfungsi untuk memisahkan mengkelompokkan menu pada program.
Frame terdiri dari pemilihan peta digital, masukkan data GPS, posisi, dan peta
digital.
7. Checkbox dugunakan untuk melakukan pemilihan yang lebih dari satu dalam satu
group pilihan seperti peta digital yaitu: peta dasar, peta pemancar, dan peta
pengukur.
8. Mapobject memuat peta dasar, peta pemancar, dan peta pengukur.
40
BAB IV
HASIL DAN PEMBAHASAN
4.1. Tampilan Program
Pemetaan lokasi pada sistem pemetaan dan pengawasan radio FM berbasis sistem informasi geografis (SIG) di wilayah D.I. Yogyakarta mempunyai 3 tampilan utama yaitu tampilansplash screen, tampilan lokasi pemancar, dan tampilan lokasi pengukuran.
4.1.1.
Splash Screen
Splash Screen digunakan untuk menampilkan tampilan pembuka yang ditampilkan selama proses membuka tampilan peta pemancar dan pengukuran (loading data). Tampilan splash screensebelumnya tidak terdapat dalam bab perancangan. Penambahan tampilan ini berfungsi untuk memberi informasi yang berisi judul dan data pembuat program. Tampilan saatSplash Screendijalankan ditunjukkan pada Gambar 4.1.
Gambar 4.1. TampilanSplash Screen
Pada Gambar 4.1. di atas, ditunjukkan bahwa program telah dapat bekerja dengan baik yaitu dengan menampilkan judul program dan data pembuat program.
4.1.2. Tampilan
Form
Lokasi Pemancar
Untuk memulai menjalankan program, pertama-tama dilakukan koneksi laptop/ PC dengan GPS melalui kabel data (USB). Selanjutnya dilakukan pengambilan data posisi dengan GPS di lokasi pemancar. Tampilan form peta pemancar ditunjukkan pada Gambar 4.2. dan tabel keterangan gambar ditunjukkan pada Tabel 4.1.
Gambar 4.2. Tampilan program lokasi pemancar
Tabel 4.1. Keterangan gambar tampilan program lokasi pemancar
No Nama Tampilan Keterangan
1 Bantuan Untuk menampilkan cara penggunaan program 2 Keluar Keluar dari program
3 Peta Yogyakarta Untuk menampilkan peta Yogyakarta
4 Data pemancar NoGPS, cek nomor GPS, cari nomor GPS, dan data query SPA 5 Mode tampilan Perbesar, perkecil, dan normal
6 Lokasi Untuk menapilkan koordinat x dan y dari peta
7 Posisi Data bujur, lintang, arah bujur, arah lintang, dan koordinat x dan y 8 Konversi Untuk mengkonversi data posisi ke koordinat x dan y
9 Ambil data Untuk mengambil data koordinat dari GPS
13 12 9
11 3
2 1
19
4 5 6 7 8
17 18
16 15 14
Tabel 4.1. (Lanjutan) Keterangan gambar tampilan program lokasi pemancar
No Nama Tampilan Keterangan
10 Pengambilan baru Mengosongkan semua text box data GPS dan memulai pengukuran baru
11 Simpan Untuk menyimpan data posisi dalam basis data 12 Hapus Untuk menghapus baris dalam tabel basis data
13 Map1 Untuk menampilkan peta
14 Posisi data Bujur, lintang, arah bujur dan lintang, koordinat x, dan y, dan waktu pengambilan
15 Hapus peta Untuk menghapus peta dan nama yang tercantum di legend
16 Peta pemancar Menampilkan titik lokasi pada lokasi pemancar
17 Legend Untuk menampilkan keterangan peta
18 Mencari data Untuk mencari letakfiledata GPS
19 Cetak Untuk mencetak tabel basis data GPS
Jika tombol “Mencari Data” ditekan, maka program akan membuka kotak dialog untuk memilih file pada memory card GPS. Untuk mengetahui nomor pemancar, admin harus memilih nama radio pada combobox. Selanjutnya tombol “Cari no GPS” ditekan dan hasilnya akan muncul dalam sebuahmessageboxyang berisi no pemancar dan nomor GPS. Jika tombol “OK” padamessageditekan, maka nomor pemancar akan muncul padatextbox “No GPS”.
Proses kemudian dilanjutkan dengan mengambil data posisi dari pemancar yaitu dengan menekan tombol “Ambil data”. Jika tombol “Ambil data” ditekan, maka program akan memunculkan data posisi dan waktu pengambilan data. Proses selanjutnya adalah proses konversi yang dilakukan dengan menekan tombol “konversi”. Konversi digunakan untuk mengubah koordinat bujur ke koordinat x dan koordinat lintang ke koordinat y. Kemudian dilanjutkan dengan menekan tombol “Simpan” untuk menyimpan data posisi ke dalam basis data. Jika data yang tersimpan pada basis data salah, maka dapat dilakukan penghapusan data dengan menekan tombol “Hapus” untuk menghapus data tersebut.
![Gambar 2.2. Penentuan jarak dengan kode [4]](https://thumb-ap.123doks.com/thumbv2/123dok/1746850.2089372/24.595.5.576.61.709/gambar-penentuan-jarak-dengan-kode.webp)
![Tabel 2.1. Ketelitian dari metode penentuan posisi secara absolut dan diferensial [4]](https://thumb-ap.123doks.com/thumbv2/123dok/1746850.2089372/29.595.22.576.84.723/tabel-ketelitian-metode-penentuan-posisi-secara-absolut-diferensial.webp)
![Tabel 2.2. Jenis - jenis informasi (sentence ID) [7]](https://thumb-ap.123doks.com/thumbv2/123dok/1746850.2089372/30.595.20.578.107.686/tabel-jenis-jenis-informasi-sentence-id.webp)