International Review on
Computers and Software
(IRE COS)
Contents:Hand Motion Gesture for Human-Computer Interaction Using Support Vector Machine and Hidden Markov Model by Suharjito, F itra B. A dinugraha
374
F uzzy E xpert System for Classifying Pests and Diseases of Paddy Using Bee Colony Algorithms
by Yovita Tunardi, Suharjito
381
A F ramework for Social Media and Text-Based Content Analysis for E vent Management Purposes
by Qusai A buein, Mohammed Q. Shatnawi, Muneer Bani Yassein, Radwan Batiha
388
Optimized Implementation of H.264/ AVC Motion E stimation on a Mixed Architecture Using SynDE x-Mix
by Oussama F ek i, Thierry Grandpierre, N ouri Masmoudi, Mohamed A k il
395
Integration E lectronic Patients’ Records with Open Life Sciences Datasets Using Semantic Web Tools
by Bassam N ajeeb, Bassel A l Khatib
403
E nhancing Relay Selection Scheme for Connecting VANE Ts to Internet Over IE E E 802.11p in Congested and F ading E nvironment Scenarios
by D. A bada, A . Massaq, A . Boulouz
410
Key F rames Based Video Authentication Using F ragile Watermarking and Singular Value Decomposition
by A ssma A zeroual, Karim A fdel
420
Localization of Mobile Stations from ONE Base Station in GSM Systems by Khalid G. Samarah
427
Word E xtraction from Arabic Handwritten Documents Based on Statistical Measures by A yman A l-Dmour, Raed A bu Zitar
436
A New Compression Scheme Based on Adaptive Vector Quantization and Singular Value Decomposition
by Imene Soussi, Mohamed Ouslim
445
Real-Time E lectroencephalography-Based E motion Recognition System by Riyanarto Sarno, Muhammad N adzeri Munawar, Brilian T. N ugraha
456 ISSN 1828-6003 Vol. 11 N. 5 May 2016
International Review on Computers and Software
(IRECOS)
Editor-in-Chief:
Prof. Marios AngelidesBrunel University London
Department of Electronic and Computer Engineering Uxbridge, Middlesex - UB8 3PH, U.K.
Co-Editor:
Dr. Harry AgiusBrunel University London
Department of Electronic and Computer Engineering Uxbridge, Middlesex - UB8 3PH, U.K.
Editorial Board:
Mikio Aoyama (Japan) Pascal Lorenz (France)
Francoise Balmas (France) Marlin H. Mickle (U.S.A.)
Vijay Bhatkar (India) Ali Movaghar (Iran)
Arndt Bode (Germany) Dimitris Nikolos (Greece)
Rajkumar Buyya (Australia) Mohamed Ould-Khaoua (U.K.)
Wojciech Cellary (Poland) Witold Pedrycz (Canada)
Bernard Courtois (France) Dana Petcu (Romania)
Andre Ponce de Carvalho (Brazil) Erich Schikuta (Austria)
David Dagan Feng (Australia) Arun K. Somani (U.S.A.)
Peng Gong (U.S.A.) Miroslav Švéda (Czech)
Defa Hu (China) Daniel Thalmann (Switzerland)
Michael N. Huhns (U.S.A.) Luis Javier García Villalba (Spain)
Ismail Khalil (Austria) Brijesh Verma (Australia)
Catalina M. Lladó (Spain) Lipo Wang (Singapore)
The International Review on Computers and Software (IRECOS)is a publication of the Praise Worthy Prize S.r.l..
The Review is published monthly, appearing on the last day of every month.
Published and Printed in Italy by Praise Worthy Prize S.r.l., Naples, May 31, 2016.
Copyright © 2016 Praise Worthy Prize S.r.l. - All rights reserved.
This journal and the individual contributions contained in it are protected under copyright by Praise Worthy PrizeS.r.l. and the following terms and conditions apply to their use:
Single photocopies of single articles may be made for personal use as allowed by national copyright laws.
Permission of the Publisher and payment of a fee is required for all other photocopying, including multiple or systematic copying, copying for advertising or promotional purposes, resale and all forms of document delivery. Permission may be sought directly from Praise Worthy Prize S.r.l. at the e-mail address:
Permission of the Publisher is required to store or use electronically any material contained in this journal, including any article or part of an article. Except as outlined above, no part of this publication may be reproduced, stored in a retrieval system or transmitted in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, without prior written permission of the Publisher. E-mail address permission request:
Responsibility for the contents rests upon the authors and not upon the Praise Worthy PrizeS.r.l..
Statement and opinions expressed in the articles and communications are those of the individual contributors and not the statements and opinions of Praise Worthy PrizeS.r.l.. Praise Worthy PrizeS.r.l. assumes no responsibility or liability for any damage or injury to persons or property arising out of the use of any materials, instructions, methods or ideas contained herein.
Praise Worthy Prize S.r.l. expressly disclaims any implied warranties of merchantability or fitness for a particular
International Review on Computers and Software (I.RE.CO.S.), Vol. 11, N. 5
ISSN 1828-6003 May 2016
Copyright © 2016 Praise Worthy Prize S.r.l. - All rights reserved DOI: 10.15866/irecos.v11i5.8641
Hand Motion Gesture for Human-Computer Interaction
Using Support Vector Machine and Hidden Markov Model
Suharjito, Fitra B. Adinugraha
Abstract
–
Hand gesture recognition for human-computer interaction has become very popularin recent times. The main problem of this technology is how the system can recognize the presence of a gesture in a streaming video. In this paper, we propose a model that can recognize hand motion gesture in avideo stream using Support Vector Machine and Hidden-Markov model. Support Vector Machine has the advantage of generalizing classification. On the other hand, Hidden Markov Model is a statistical model that is capable of modeling Spatial-temporal time series. This system is divided into two main processes. First, this system recognizes hand posture using SMV (static gesture recognition) and generates sequence observation which is used for the second process later. The second process is recognizing dynamic hand gesture with the sequence observation from the static gesture. The implementation shows that static hand gesture recognition achieves average accuracy at 91% using testing dataset. Meanwhile,dynamically isolated hand gesture recognition gets average accuracy at 89% using testing dataset. We also have tested the system with continuous dynamic gesture using video stream. The system can recognize the gesture very well with accuracy of 83%. This achievement shows that the model can be used in human computer-interaction with specific supports such as Vector Machine and Hidden Markov Model parameter. Copyright © 2016 Praise Worthy Prize S.r.l. - All rights reserved.
Keywords
:
Gesture Recognition, Hand Gesture Recognition, Human Computer InteractionI.
Introduction
In daily life, gesture becomes one of main elements of non-verbal communication. We use gesture to convey some meaningful information. Gesture recognition is the process in which gestures made by a user is made known to the system. On the other hand, human-computer interaction using motion gesture provides something more natural, innovative and user-friendly [1]. Gesture recognition has a wide range of applications, such as virtual reality, augmented reality, sign language recognition, video games, and medical application [2].
Recognition using the hand can be done using the glove-based technique, device accelerator-based [3] and visual-based technique [2]. While glove-based and accelerator device sensing are very effective tools for capturing hand motion, they are very expensive, unnatural, and difficult to calibrate and setup the procedure. On the other hand, the vision-based technique provides natural gesture. It is inexpensive but still has many challenges to improve the accuracy and speed [2].
One of the problems to achieve accuracy is how we can extract the right feature that represents the hand shape. Hand gesture recognition can be classified into two types, static and dynamic. The static gesture is a configuration or pose of the hand represented by a single image while the dynamic gesture is represented by more than one image [2]. In this paper, we focus on problems regarding both of them.
After we have acquired static hand gesture, we use the result to create a feature for the dynamic hand gesture. In the static hand gesture, we use Support Vector Machine (SVM) to classify single hand pose image with another pose. Then, Hidden Markov Model (HMM) is used to model dynamic hand gesture from the sequence of pose hand image.
II.
Related Work
In the last decades, there has been some research that performs hand gesture recognition. Some of them employ device based recognition like glove-based gesture recognition [4], This glove-based gesture recognition is very efficient in recognizing gesture because the glove contains embedded sensors that can detect motion very well. However, this method is uncomfortable for the hand because this glove must be attached to the wire. The other method using device-based is MEMS accelerator recognition [3]. In this method, the author tries to recognize motion gesture through a device that can detect acceleration of hand motion. Similar tothe glove-based gesture recognition, this method is also efficient. However, we cannot recognize the shape of the hand.
SVM is apopular model used for classification and regression. In gesture recognition, SVM is commonly paired with another feature extraction or model like HU
Suharjito, Fitra B. Adinugraha
Copyright © 2016 Praise Worthy Prize S.r.l. - All rights reserved International Review on Computers and Software, Vol. 11, N. 5
375 SVM is Fourier descriptor used by Gamal et al. [2].
This method has some advantages, including HU moments with additional fast processing because Fourier descriptor only uses a limited number of feature for each image. SVM is also often used to be combined with another classification model as proposed by Demidova. He combines SVM and fuzzy clustering algorithms [6].
Then, AbAzziz, who combines Fast Artificial Immune and SVM for maximum load margin improvement [7]. has been modified to use multiclass model and compare HCRF. Hsiang-Yueh [10] and Hui-Shyong Yeo [11] suggestthe use of YCrCb color space and convexity defect character point to extract fingertip position and perform robust dynamic hand gesture recognition with simple algorithms. SVM HMM is also commonly used to be combined with other classification models, like proposed by Regan and Srivatsa.
They present a hybrid Canny Edge Detection and Weibull Probability Density Function based on Hierarchical Dirichlet Process HMM [12]. In this paper, we focus on combining the base on these effective methods. First, we suggest combining these advantages from the previous research, such as using sub-gesture from Malgireddy [9] with little modification.
We only use a single image to detect static gesture and then perform the static gesture usingSVM. Second, the used method is performing extract feature using convexity defect method from Hsiang-Yueh to get robust finger detection. Then, we also use HMM to recognize continuous dynamics hand motion gesture. This process will be explained in the methodology.
III.
Methodology
In this section, we will present the proposed model of human-computer interaction using hand motion gesture recognition. The system is divided into four processes.
There are preprocessing, feature extraction, hand static gesture and hand dynamic gesture recognition. Fig. 2 information first and select the appropriate threshold algorithm with additional threshold configuration to be calibrated in the current environment. The default threshold in the Eq. (1) [11]. Later, we will remove the noise using dilate and mean filtering to smooth the images. This process left the image of binary color:
77 ≤ Cb ≤ 127 and 133 ≤ Cr ≤ 173
Figs. 1. Hand Segmentation,(a) original image, (b) filter color image (c) smooth image
The next step iscalculating contour of the hand forfurther use in feature extraction.
Capture
Fig. 2. Proposed model of hand motion gesture recognition
III.2. Feature Extraction Using Convexity Defect
Our proposed feature extraction method evolved from previous research regarding hand tracking and gesture recognition system [10], [11]. The result of preprocessing is the contour of the hand. The contour is a list of the point that represents a curve in an image.
Suharjito, Fitra B. Adinugraha
Copyright © 2016 Praise Worthy Prize S.r.l. - All rights reserved International Review on Computers and Software, Vol. 11, N. 5
First, we calculate polygon represented the approximate to build contour [11]. Second, it is to extract interior of the hand contour to gain more information about hand shape image. This process can be done by calculating palm center, and extracting convex hull and convexity defect. Palm Center is an area determined as the maximum inscribed circle inside the contour.
We calculate the maximum inscribed circle using Voronoi diagram [13]. The maximum point of inscribed circle lies on the point generated from the Voronoi diagram. Next, the convexity defect will be illustrated in Fig. 3. In this paper, we only use several convexity defect points that match the following criteria:
- Depth point (Pd)and start point (Ps) must be above the center of maximum inscribed circle (Ca)
- Each start point (Pa) and end point (Pe) must be above Depth Point (Pd)
- Depth of each defect (ld) must be longer than palm center radius (ra)
Fig. 3. Convex hull and convexity defect extracted from [11] hand tracking and recognition system for human-computer interaction using
low-cost hardware
The next step is calculating or extracting the feature from convexity defect that matches the criteria. In this paper, we use two feature vectors.
The first feature is taken from the angle between depth point (Pd) and end point (Pe) of each convexity defects
(θa), whilethe second one is taken from the depth distance (distance between depth point and end point).
III.3. Static Gesture Recognition Using SVM
Support vector machine is a supervised classification model that is often used to classify and regress. The basic algorithm SVM is to separate the feature of training data with a line or field separator, which is called hyperplane. The function of the hyperplane is to maximize the distance between the two pieces of data [2].
Basically, SVM is used to classify the two pieces of data or classes. However, the application of SVM applied is to classify more than two classes using method 1-vs-1 and 1-vs-all strategy 1-vs-1 by comparing one class with another class so the class that has the highest value will become the solution.
This method has andisadvantage. When the class that will be classified multiplies, the time to classify will increase, that can affect the performance of the application. Moreover, the strategy of one-vs-all SVM does createa model in which the model will detrain with all class of existing dataset so that the decision will depend on the model [14].The other ability of the SVM is providing a transformation dataset from dimensional data for other higher dimensional data defined by kernel function [6].
Now, we have a set of feature hand shape images. Then, the next step is to run the SVM classifier model and get the best parameter to classify the images. SVM is a supervised machine learning method used for principle of structural risk minimization (SRM). The SRM induction principle has two main objectives. First, it is to control the empirical risk on the training data, and the second is to control the capacity of the decision functions used to obtain this risk value [14].
There is an immediate problem arising from the
SVM’s original hyperplane formulation. It is not very
obvious how to make the model applicable to more than two classes. Several approaches have been proposed to overcome this limitation. Two of them are known as the 1-vs-1 and 1-vs-all strategies for multiple class classification. For the decision problem over classes, 1-vs-all requires the creation of classifiers.
Each is trained to distinguish one class from the others. The decision is taken with a winner-takes-all approach. However, there is no clear indication that this approach results in an excellent decision. In the 1-vs-1 strategy, the problem is divided into c (c – 1) / 2 sub-problems considering there are only two classes at a time.
At the decision phase, each machine casts a vote for one of the classes and the label with the highest number of votes wins.
This leaves the problem of evaluating an increased number of machines every time a new instance is classified – which can become troublesome or prohibitive in time sensitive applications easily [15].
In this paper, we train and test four kernel types: RBF, Linear, Polynomial, and sigmoid. Then, we propose ten poses of static hand gesture as illustrated in Fig. 4. We use multiclass classifier of SVM to classify ten classes of static hand gesture. Fig. 4 shows static hand gesture representing sequence observation label. This static gesture is not used for human-computer interaction.
III.4. Dynamic Gesture Recognition using HMM
This step requires the recognition ofdynamic hand gesture since the process considered is the dynamic process and needs to be handled with the learning model that can be accommodated with temporal time.
Suharjito, Fitra B. Adinugraha
Copyright © 2016 Praise Worthy Prize S.r.l. - All rights reserved International Review on Computers and Software, Vol. 11, N. 5
377 Fig. 4. 10 static hand gesture pose (later this pose used for sequence
observation label for dynamic hand gesture)
We propose HMM model [16] to accommodate this dynamic motion gesture model. Hidden Markov Model is one of the models based on the statistic. HMM is often used in applications that intersect with time. HMM possesses three main parameters, λ = (Π, A, B) [17],
where Π represents the vector beginning, A is the matrix
of transition while B is the matrix emission. Furthermore, HMM has three major problems, which are Evaluation, Decoding, and Training. However, these three problems can be solved using the method of Forward-Backward algorithm, Viterbi, and Baum-Welch [17].
In the application, HMM is often implemented using three topologies. There are main Fully Connected (Ergodic model) where all the states are connected as a whole between the states; (Left-Right model) where each state can only be returned to the state itself and in the next state; (Parallel-Left-Right model) where each state can only be repopulated themselves or towards the next state. Shown in Figs. 6, the input of the model is the result of sequence classification static hand gesture from SVM. Figs. 5 show dynamic hand gestures in this system.
Left Click
Right Click
Swipe Right
Swipe Left
Grap
(a)
(b)
(c)
(d)
(e)
Figs. 5. 5 Dynamic hand motion gesture that replacing mouse functionality (random sample images from frame 1 until the end of videos), (a) gesture for “Left Click”,(b) gesture for “Right Click”,(c)
gesture for “Swipe Left”,(d) gesture for “SwipeRight” (e) gesture for “Grap”
(a)
(b)
(c)
Figs. 6. (a) ergodic, (b) left-right, (c) parallel-left-right [18] extracted froma tutorial on hidden markov model
In this process, we train HMM model with HMM type Ergodic and left-right then for each type of HMM.We train it usingthe total hidden state from 2 until 9.
IV.
Result and Discussion
Our proposed system is implemented in .net using EmguCV wrapper library, libsvm, and accord hmm.
Fig. 7 shows the system implementation screenshot. We use the standard webcam with 240 × 320 pixels resolution. Moreover, we use conditional indoor lighting environment. In this process, we use three scenarios to test the system.
The first scenario that we find is the matching of SVM parameter C and γ with the value from -3 to 3 for C parameter and -15 to 3 for γ parameter.
We use four kernels (RBF, Linear, Polynomial, and Sigmoid) in here.
Fig. 7. Hand motion gesture recognition system
Suharjito, Fitra B. Adinugraha
Copyright © 2016 Praise Worthy Prize S.r.l. - All rights reserved International Review on Computers and Software, Vol. 11, N. 5
The second scenario we see is the matching of HMM parameter topology (Ergodic, left-right, and parallel-left-right) and we test the number of the hidden state with the value from 2-9. In this scenario, we will test it using isolated hand motion gesture.
The third scenario is that we will test the best parameter of SVM and HMM with continuous hand motion gesture. Then, we calculate the accuracy with the following equation:
(2)
We use two datasets that were created by our camera. The first dataset contains 50 images used to train and 50 images to test each static gesture.
In this dataset, every image has various orientation and scale. The second dataset contains 30 videos used to train and 30 videos to test each isolated dynamic gesture recognition.
On the other hand, we have two videos to test the continuous dynamic hand gesture. One video has five gestures that are performed sequentially, and another video contains five gestures done randomly. In other words, our dataset contains 1000 images and 302 videos. Table I shows that kernel RBF with parameter C = 3 and
γ = -1 achieves maximum accuracy training at 100% and 93.4% for the testing dataset.
TABLEI maximum accuracy from training HMM with the number of hidden state = 4 and kernel SVM Polynomial.
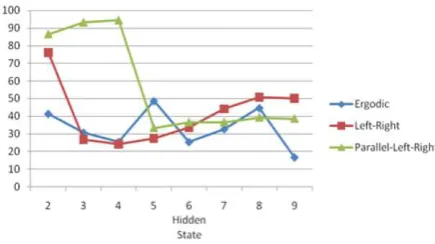
On the other hand, Figs. 8, 9, 10, 11 show that the best accuracy for hand motion gesture is HMM with topology Parallel-Left-Right and with 2-4 number of hidden state.
The highest accuracy is achieved by using SVM kernel polynomial with parameter C = 0.5 andγ = -1.
Then, Ergodic topology has the worst accuracy in all SVM kernel.This is because the sequence observation only needs various three sequences for each gesture, whileErgodic topology, which has more transitions than lef-right topology,was used to solve more complex
HMM Topology Number of Hidden State
parallel-Left-Right 4 98 94.67
TABLEV
RESULT TEST SCENARIO 1USING SIGMOID KERNEL SVM
HMM Topology Number of Hidden State
Left-Right 2 96.66667 82.66667
Parallel-Left-Right 4 95.33333 82
Fig. 8 below shows the result of graph in finding the best topology and number of hidden state in HMM.
The last scenario is to test the best model of SVM and HMM for continuous dynamic hand gesture recognition.
The system shows a good result, that continuous hand gesture with convergent dataset testing (videos that contain only one gesture variance) can classify the gesture with achievement up to 83%. Otherwise, testing with videos that have random gesture achieves 63%. This happens because convergent gesture videos have the same sequence of image observation over all. Therefore, HMM gets high probability to choose the same sequence of image observation. If we test it with videos that have the random sequence of gesture, the system gets false recognition.
Fig. 8. HMM topology and number of hidden state testing result for kernel RBF SVM
Fig. 9. HMM topology and number of hidden state testing result for kernel LINEAR SVM
Suharjito, Fitra B. Adinugraha
Copyright © 2016 Praise Worthy Prize S.r.l. - All rights reserved International Review on Computers and Software, Vol. 11, N. 5
379 Fig. 10. HMM topology and number of hidden state testing result
for kernel POLYNOMIAL SVM
Fig. 11. HMM topology and number of hidden state testing result for kernel SIGMOID SVM
V.
Conclusion and Future Works
This paper suggests a system for human-computer interaction using hand motion gesture. This system achieves an average accuracy of about 97%. The highest accuracy of static hand gesture is obtained from SVM with kernel RBF, C = 3 and γ = -1.
On the other hand, the highest accuracy for dynamic hand gesture is from HMM with topology parallel-left-right using kernel polynomial with parameter C = 0.5 and
γ = -1. It reaches 98% of accuracy.
By using HMM topology parallel-left-right with four hidden states, the system presents 97% of accuracy.
In the future, our system will focus on recognition gesture spotting using a depth camera to create effective skin color segmentation.
References
[1] M. Panwar and P. Singh Mehra, “Hand gesture recognition for
human computer interaction,” 2011 Int. Conf. Image Inf. Process., no. Iciip, pp. 1–7, 2011.
[2] H. M. Gamal, H. M. Abdul-Kader, and E. a. Sallam, “Hand
gesture recognition using fourier descriptors,” 2013 8th Int. Conf. Comput. Eng. Syst., pp. 274–279, 2013.
[3] R. Xu, S. Zhou, and W. Li, “MEMS accelerometer based nonspecific-user hand gesture recognition,” Sensors Journal, IEEE, vol. 12, no. 5, pp. 1166–1173, 2012.
[4] P. Kumar, J. Verma, and S. Prasad, “Hand Data Glove: A Wearable Real-Time Device for Human-Computer Interaction,”
Int. J. Adv. Sci. Technol., vol. 43, pp. 15–26, 2012.
[5] M. K. Bhuyan, D. Ajay Kumar, K. F. MacDorman, and Y.
Iwahori, “A novel set of features for continuous hand gesture recognition,” J. Multimodal User Interfaces, 2014.
[6] Demidova, L., Sokolova, Y., Nikulchev, E., Use of Fuzzy Clustering Algorithms Ensemble for SVM Classifier Development, (2015) International Review on Modelling and Simulations (IREMOS), 8 (4), pp. 446-457.
[7] Ab Aziz, N., Abdul Rahman, T., Zakaria, Z., Reactive Power Planning for Maximum Load Margin Improvement Using Fast Artificial Immune Support Vector Machine (FAISVM), (2014)
International Review of Automatic Control (IREACO), 7 (5), pp. 436-447.
[8] M. Elmezain, A. Al-Hamadi, J. Appenrodt, and B. Michaelis, “A Hidden Markov Model-based continuous gesture recognition
system for hand motion trajectory,” 2008 19th Int. Conf. Pattern Recognit., pp. 3–6, 2008. recognition system for human-computer interaction using
low-cost hardware,” Multimed Tools Applications 74(1) pp. 2687– 2715, 2015.
[12] Regan, D., Srivatsa, S., Mixed Pixel Wise Characterization Based on HMM and Hyper spectral Image Gradient Enhancement for Classification Using SVM-FSK, (2014) International Review on Computers and Software (IRECOS), 9 (6), pp. 1017-1026. [13] M. Schuster, “Largest Empty Circle Problem,”
https://www.cs.swarthmore.edu/~adanner/cs97/s08/papers/schuste r.pdf pp. 28–37, 2008.
[14] L. Gericke, M. Wenzel, R. Gumienny, C. Willems, and C. Meinel,
“Handwriting recognition for a digital whiteboard collaboration platform,” Proc. 2012 Int. Conf. Collab. Technol. Syst. CTS 2012, pp. 226–233, 2012.
[15] C. R. Souza and E. B. Pizzolato, “Sign Language Recognition with Support Vector Machines and Hidden Conditional Random Fields: Going from Fingerspelling to Natural Articulated Words" Machine Learning and Data Mining in Pattern Recognition,” vol. 7988, of the series Lecture Notes in Computer Science pp 84-98, 2013.
[16] A. Ramamoorthy, N. Vaswani, S. Chaudhury, and S. Banerjee,
“Recognition of dynamic hand gestures,” Pattern Recognition, vol. 36, no. 9, pp. 2069–2081, 2003.
[17] M. Elmezain and A. Al-hamadi, “A Hidden Markov Model-Based
Isolated and Meaningful Hand Gesture Recognition,”Proceedings Of World Academy Of Science, Engineering And Technology (WASET) Vol. 31 July 2008 pp. 393–400, 2008.
[18] L. R. Rabiner, “A Tutorial on Hidden Markov Models and
Selected Application in Speech Recognition.”Proceeding of the IEEE Vol. 77 No. 2 February 1989 pp. 257 - 286. 1989.
Authors’
information
Magister in Information Technology, Binus Graduate Program, Bina Nusantara University, Jakarta, Indonesia.
E-mails: [email protected] [email protected]
Fitra B. Adinugraha received his Bachelor
degree in Informatics majoring in Computer Science from Institute Technology Telkom (ITT), Indonesia in 2011. Presently, he is pursuing the Graduate Program of Information Technology at Bina Nusantara University, Indonesia. His research interest includes Human Computer Interaction (HCI), Natural User Interface (NUI), Mobile Applications, Cloud Storage, and Enterprise Architecture Design.
Suharjito, Fitra B. Adinugraha
Copyright © 2016 Praise Worthy Prize S.r.l. - All rights reserved International Review on Computers and Software, Vol. 11, N. 5
Suharjito is the Head of Information
Technology Department in Binus Graduate Program of Binus University. He received under graduated degree in mathematics from The Faculty of Mathematics and Natural Science in GadjahMada University, Yogyakarta, Indonesia in 1994. He received master degree in information technology engineering from Sepuluh November Institute of Technology, Surabaya, Indonesia in 2000. He received the PhD degree in system engineering from the Bogor Agricultural University (IPB), Bogor, Indonesia in 2011.His research interests are intelligent system, Fuzzy system, image processing and software engineering.
International Review on Computers and Software
(IRECOS)
Aims and scope
The International Review on Computers and Software (IRECOS) is a peer-reviewed journal that publishes
original papers on all branches of the academic Computer Science and Engineering communities. Thematic areas include, but are not limited to:
Computer Science Theory, Methods and Tools
Software engineering, algorithms and complexity, computational logic, formal methods, heuristics, mathematics and models of computation, programming languages and semantics.
Computer and Communications Networks and Systems
Network and distributed architectures and protocols, traffic engineering, resource management and Quality of Service, network monitoring and traffic measurements, wireless networks, personal and body area networks, vehicular networks, content and service-centric networking, multimedia communications and standards, energy efficient/green networks, opportunistic and cognitive networks.
Computational Intelligence, Machine Learning and Data Analytics
Human computer interaction, computational science, pattern recognition, computer vision, speech processing, machine intelligence and reasoning, web science, databases, information retrieval, visualisation, current applications domains, e.g. Healthcare and BioInformatics, and emerging application domains, e.g. big data.
Security in Computer Systems and Networks
Computer systems security, hardware and embedded systems security, security protocol design and analysis, cryptography and cryptanalysis, intrusion detection systems and techniques, user authentication techniques and systems.
Hardware Design
Computer architectures, parallel architectures, operating systems and signal processing.
Instructions for submitting a paper
The journal publishes invited tutorials or critical reviews; original scientific research papers (regular papers), letters to the Editor and research notes which should also be original presenting proposals for a new research, reporting on research in progress or discussing the latest scientific results in advanced fields; short communications and discussions, book reviews, reports from meetings and special issues describing research in any of the above thematic areas.
All papers will be subjected to a fast editorial process.
Any paper will be published within two months from the submitted date, if it has been accepted.
Papers must be correctly formatted, in order to be published.
An Author guidelines template file can be found at the following web address:
www.praiseworthyprize.org/jsm/?journal=irecos
Manuscripts should be sent via e-mail as attachment in .doc and .pdf formats to:
The regular paper page length limit is defined at 15 formatted Review pages, including illustrations, references and author(s) biographies.
Pages 16 and above are charged 10 euros per page and payment is a prerequisite for publication.
Abstracting and Indexing Information:
Cambridge Scientific Abstracts (CSA/CIG)
Academic Search Complete (EBSCO Information Services) Elsevier Bibliographic Database - SCOPUS
Index Copernicus - IC Journal Master List 2012: ICV 6.45
Autorizzazione del Tribunale di Napoli n. 59 del 30/06/2006

![Fig. 3. Convex hull and convexity defect extracted from [11] hand REPRINT](https://thumb-ap.123doks.com/thumbv2/123dok/4055885.1999305/5.595.60.291.273.454/fig-convex-hull-convexity-defect-extracted-hand-reprint.webp)