Abstrak— Konverter KY merupakan jenis dc-dc konverter yang dapat menurunkan atau menaikkan tegangan output. Konverter ini dapat diterapkan untuk mencatu motor DC penguatan terpisah sebagai penggerak mobil listrik.
Tugas akhir ini membahas konverter KY inverse bidirectional sebagai pencatu daya kendaraan listrik. Dengan menggunakan dua mode, mode buck dan boost konverter KY dapat bekerja dua arah/bidirectional. Pada saat mode boost, konverter menaikkan tegangan dari baterai menuju ke motor sedangkan ketika mode buck, konverter menurunkan tegangan dari motor DC penguatan terpisah yang berubah sementara menjadi generator menuju ke baterai. Sistem penyalaan konverter KY didesain menggunakan Pulse Width Modulation (PWM) dengan kecepatan mobil sebagai referensi pengaturan. Hasil simulasi sistem keseluruhan, yang berupa konverter KY inverse dan motor DC penguatan terpisah, menunjukkan bahwa konverter dan kontrol PWM mampu mengendalikan kecepatan mobil dengan baik.
Kata Kunci— konverter KY inverse bidirectional, motor DC penguatan terpisah, mode buck-boost
I. PENDAHULUAN
erusakan lingkungan semakin lama semakin meningkat, utamanya pencemaran udara. Semakin lama pencemaran udara yang di akibatkan oleh kendaraan bermotor semakin meningkat. Solusi untuk mengurangi pencemaraan udara pada perkotaan yang padat penduduk yaitu dengan menggunakan kendaraan listrik sebagai sarana transportasi. Penggunaan kendaraan listrik lebih banyak diminati karena memiliki sifat ramah lingkungan.
Kendaraan listrik menggunakan motor listrik sebagai penggeraknya salah satunya dengan menggunakan motor dc penguatan terpisah. Kendaraan listrik mendapatkan tenaga dari listrik yang disimpan di dalam baterai dan tenaga awalnya berasal dari sumber luar. Daya yang disimpan dalam baterai kemudian digunakan untuk menggerakkan motor listrik. Akan tetapi biasanya tegangan baterai lebih kecil dibandingkan dengan tegangan pada motor. Saat kendaraan berjalan baterai berfungsi mensuplai daya untuk menggerakkan motor. Sedangkan saat kendaraan dalam kondisi pengereman, motor berubah menjadi generator sehingga daya disuplai dari motor untuk mengisi baterai. Hal ini menyebabkan perlu adanya
komponen tambahan untuk menaikkan tegangan yang berasal dari baterai ke motor dan menurunkan tegangan dari motor ke baterai. Salah satu komponen yang dapat digunakan adalah konverter KY inverse dengan pengaturan bidirectional.
II. PENGEMUDIAN MOTOR DC MENGGUNAKAN KONVERTER KY INVERSE BIDIRECTIONAL A. Konverter KY Inverse Bidirectional pada Motor DC Penguatan Terpisah Motor DC Baterai S2 S1 S3 L C Cb Motor dc penguatan terpisah
Gambar 1 Rangkaian konverter KY inverse bidirectional pada motor DC penguatan terpisah
Pada gambar 1 merupakan rangkaian konverter KY inverse bidirectional pada motor DC penguatan terpisah. Rangkaian tersebut tersusun atas tiga pasang mosfet, sebuah baterai, dua buah kapasitor, sebuah inductor dan, motor dc penguatan terpisah.
Baterai dihubungkan langsung dengan konverter KY inverse bidirectional dan motor DC penguatan terpisah. Pada rangkaian diatas konverter tersebut dirancang sesuai dengan motor yang digunakan yaitu 240 V dan bekerja dua arah/bidirectional dimana tegangan pada output konverter dijaga konstan dengan menggunakan kontrol tegangan.
B. Spesifikasi Baterai
Pada tugas akhir ini membutuhkan sebuah baterai dengan spesifikasi seperti pada Tabel 1 :
Tabel 1. Parameter Baterai
Parameter Nilai
Tegangan Nominal 180 V Rated Capacity 12.5 Ah
KONVERTER KY
INVERSE BIDIRECTIONAL
SEBAGAI
PENCATU DAYA KENDARAAN LISTRIK
Maya Saphira Citraningrum, Dedet C.Riawan dan Mochamad Ashari
Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS)
Jl. Arief Rahman Hakim, Surabaya 60111
: [email protected]
Konverter tersebut hanya dapat menaikkan tegangan maksimal dua kali tegangan inputnya sehingga baterai yang digunakan memiliki nilai tegangan 180 V supaya output dari konverter sesuai dengan rating tegangan motor yaitu 240 V.
Bila tegangan baterai lebih kecil dari 180 V maka output dari converter tersebut tidak akan mencapai rating motornya yaitu 240V. Tipe baterai yang digunakan yaitu Lithium-Ion dan kapasitas rata-rata dari baterai tersebut sebesar 12.5 Ah.
Dari tabel tersebut daya tahan baterai dapat diperkirakan yaitu
𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑=𝑘𝑘𝑑𝑑𝑘𝑘𝑑𝑑𝑘𝑘𝑘𝑘𝑘𝑘𝑑𝑑𝑘𝑘 𝑥𝑥𝑘𝑘𝑆𝑆𝑡𝑡𝑑𝑑𝑡𝑡𝑡𝑡𝑑𝑑𝑡𝑡𝑆𝑆𝑑𝑑𝑘𝑘𝑆𝑆𝑆𝑆𝑑𝑑𝑘𝑘 …..(1)
𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑= 12.5 𝑥𝑥 180
𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑= 2250 𝑊𝑊𝑑𝑑𝑘𝑘𝑘𝑘 − ℎ𝑜𝑜𝑆𝑆𝑆𝑆𝑘𝑘
Bila baterai digunakan 80% maka daya tahan baterai tersebut;
𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑘𝑘𝑑𝑑ℎ𝑑𝑑𝑡𝑡𝑆𝑆𝑑𝑑𝑘𝑘𝑆𝑆𝑆𝑆𝑑𝑑𝑘𝑘= 2250 𝑊𝑊𝑑𝑑𝑘𝑘𝑘𝑘 − ℎ𝑜𝑜𝑆𝑆𝑆𝑆𝑘𝑘𝑥𝑥 80 % …..(2)
𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑘𝑘𝑑𝑑ℎ𝑑𝑑𝑡𝑡𝑆𝑆𝑑𝑑𝑘𝑘𝑆𝑆𝑆𝑆𝑑𝑑𝑘𝑘= 1800 𝑗𝑗𝑑𝑑𝑆𝑆
C.
Desain konverter KY Inverse BidirectionalDC DC R2 S1 S2 S3 C2 Cb L C1 R1
Gambar 2 Rangkaian konverter KY inverse bidirectional [3]
Pada Gambar 2 menunjukkan desain rangkaian konverter KY inverse bidirectional. Desain rangkaian konverter tersebut dirancang sesuai dengan motor yang digunakan yaitu motor dc penguatan terpisah dengan tegangan input = 240 V, torsi = 30Hp dan kecepatan = 1750 rpm. Rangkaian diatas tersusun atas tiga buah mosfet, tiga buah kapasitor, dua buah sumber tegangan dc dan dua buah reisistor.
Konverter KY adalah salah satu jenis dc to dc konverter yang berfungsi untuk mengubah suatu tegangan dc menjadi tegangan dc yang lain dengan cara dinaikkan. Pada tugas akhir ini konverter KY tidak hanya dapat menaikkan tegangan namun juga menurunkan tegangan atau beroperasi dua arah (bidirectional) dengan menggunakan mode buck dan mode boost.
a) Mode Buck
[1] Mode Buck ketika Saklar S2 Off
Ketika saklar S2 dalam keadaan off , saklar S1 dan S3 dalam keadaan on maka tegangan yang melewati induktor adalah selisih dari tegangan input dan tegangan output. Pada kapasitor (C1) akan mengalir arus yang sama dengan arus induktor (𝑘𝑘𝐿𝐿)dikurangi arus kapasitor (𝑘𝑘𝑆𝑆) kembali mengalami pengurangan ketika melewati beban R1.
𝐿𝐿𝜕𝜕𝑘𝑘𝜕𝜕𝑘𝑘=𝑣𝑣𝑘𝑘 − 𝑣𝑣𝑜𝑜𝑑𝑑𝑑𝑑𝑡𝑡𝐶𝐶𝜕𝜕𝑣𝑣𝜕𝜕𝑘𝑘𝑜𝑜 =𝑘𝑘𝐿𝐿− 𝑘𝑘𝑆𝑆−𝑅𝑅𝑣𝑣𝑜𝑜1 ……..(3) DC DC R2 S1 S2 S3 C2 Cb L C1 R1
Gambar 3 Rangkaian konverter KY mode buck saat saklar S2 off [3]
Gambar 4 Sinyal kontrol mode buck saat S2 Off dan S1 dan S3 On
[2] Mode Buck ketika Saklar S2 On
Pada saat saklar S2 dalam keadaan on , saklar S1 dan S3 dalam keadaan off maka tegangan yang melewati induktor adalah selisih dari tegangan input dan dua kali tegangan output . Pada kapasitor (C1) akan mengalir arus yang sama dengan arus induktor dikurangi dengan arus yang melewati resistor (R1). 𝐿𝐿𝜕𝜕𝑘𝑘𝜕𝜕𝑘𝑘=𝑣𝑣𝑘𝑘 −2𝑣𝑣𝑜𝑜𝑑𝑑𝑑𝑑𝑡𝑡𝐶𝐶𝜕𝜕𝑣𝑣𝜕𝜕𝑘𝑘𝑜𝑜=𝑘𝑘𝐿𝐿−𝑣𝑣𝑅𝑅𝑜𝑜1 ……..(4) DC DC R2 S1 S2 S3 C2 Cb L C1 R1
Gambar 5 Rangkaian konverter KY mode buck saat saklar S2 on[3]
Gambar 6 Sinyal kontrol mode buck saat S2 On dan S1 dan S3 Off
Sehingga, tegangan input dan output dapat dari persamaan (3) dan (4) dituliskan sebagai berikut :
𝑉𝑉𝑜𝑜 𝑉𝑉𝑘𝑘 =
1
2−𝐷𝐷 ……..(5)
b) Mode Boost
[1] Mode Boost ketika Saklar S2 Off
Saat saklar S2 dalam keadaan off , saklar S1 dan S3 dalam keadaan on. Tegangan yang melewati induktor adalah selisih dari tegangan output dan tegangan input. Arus yang melewati kapasitor (C2) sama dengan arus induktor memiliki nilai negatif (−𝑘𝑘𝐿𝐿). Arus yang melewati induktor (L) sama dengan arus negatif (−𝑘𝑘𝐿𝐿) dikurangi arus yang mengalir pada resistor (R2) seperti pada gambar 7.
𝐿𝐿𝜕𝜕𝑘𝑘𝜕𝜕𝑘𝑘 =𝑣𝑣𝑜𝑜− 𝑣𝑣𝑘𝑘𝑑𝑑𝑑𝑑𝑡𝑡𝐶𝐶𝜕𝜕𝑣𝑣𝜕𝜕𝑘𝑘𝑜𝑜=−𝑘𝑘𝐿𝐿−𝑅𝑅𝑣𝑣𝑜𝑜2 ……..(6) DC DC R2 S1 S2 S3 C2 Cb L C1 R1
Gambar 7 Rangkaian konverter KY mode boost saat saklar S2 off [3]
Gambar 8 Sinyal kontrol mode boost saat S2 Off dan S1 dan S3 On
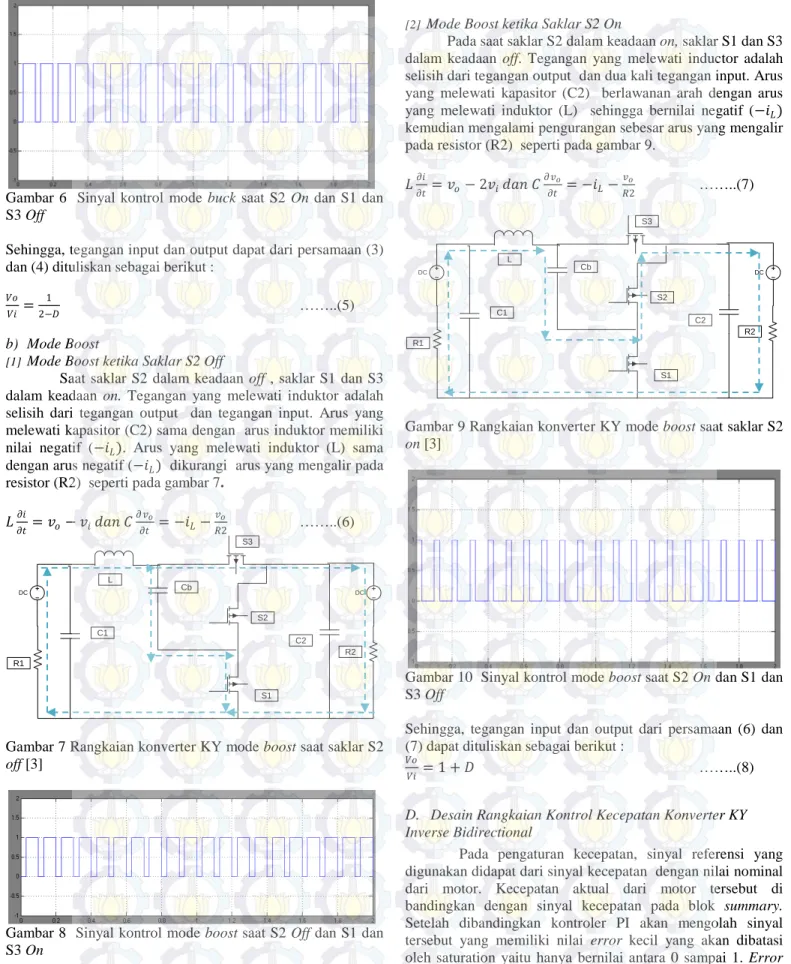
[2] Mode Boost ketika Saklar S2 On
Pada saat saklar S2 dalam keadaan on, saklar S1 dan S3 dalam keadaan off. Tegangan yang melewati inductor adalah selisih dari tegangan output dan dua kali tegangan input. Arus yang melewati kapasitor (C2) berlawanan arah dengan arus yang melewati induktor (L) sehingga bernilai negatif (−𝑘𝑘𝐿𝐿) kemudian mengalami pengurangan sebesar arus yang mengalir pada resistor (R2) seperti pada gambar 9.
𝐿𝐿𝜕𝜕𝑘𝑘𝜕𝜕𝑘𝑘=𝑣𝑣𝑜𝑜−2𝑣𝑣𝑘𝑘𝑑𝑑𝑑𝑑𝑡𝑡𝐶𝐶𝜕𝜕𝑣𝑣𝜕𝜕𝑘𝑘𝑜𝑜=−𝑘𝑘𝐿𝐿−𝑣𝑣𝑅𝑅𝑜𝑜2 ……..(7) DC DC R2 S1 S2 S3 C2 Cb L C1 R1
Gambar 9 Rangkaian konverter KY mode boost saat saklar S2 on [3]
Gambar 10 Sinyal kontrol mode boost saat S2 On dan S1 dan S3 Off
Sehingga, tegangan input dan output dari persamaan (6) dan (7) dapat dituliskan sebagai berikut :
𝑉𝑉𝑜𝑜
𝑉𝑉𝑘𝑘 = 1 +𝐷𝐷 ……..(8)
D. Desain Rangkaian Kontrol Kecepatan Konverter KY Inverse Bidirectional
Pada pengaturan kecepatan, sinyal referensi yang digunakan didapat dari sinyal kecepatan dengan nilai nominal dari motor. Kecepatan aktual dari motor tersebut di bandingkan dengan sinyal kecepatan pada blok summary. Setelah dibandingkan kontroler PI akan mengolah sinyal tersebut yang memiliki nilai error kecil yang akan dibatasi oleh saturation yaitu hanya bernilai antara 0 sampai 1. Error tersebut akan dibandingkan dengan sinyal gigi gergaji, dimana bila nilai error lebih tinggi dari sinyal gigi gergaji maka output dari rangkaian kontrol tersebut bernilai 1 atau ON. Jika
error lebih kecil dari nilai sinyal gigi gergaji maka output dari rangkaian tersebut bernilai 0 atau OFF.
183 NOT + -Feedback kecepatan Saklar S1 saturasi PI komparator Sinyal gigi gergaji Kecepatan referensi Saklar S3 Saklar S2 kontroler
Gambar 11 Rangkaian Kontrol Konverter KY Inverse Bidirectional
Pada gambar 11 diatas, output dari rangkaian kontrol dibagi menjadi tiga. Tiga output rangkaian kontrol tersebut digunakan untuk mengontrol tiga saklar mosfet pada konverter yaitu S1,S2 dan S3. Saklar S1 dan S3 bekerja secara bersamaan sedangkan saklar S2 bekerja sendiri dengan menggunakan logika NOT.
E. Spesifikasi Motor DC Penguatan Terpisah
Pada tugas akhir ini jenis motor dc yang digunakan adalah motor dc penguatan terpisah karena lebih mudah dalam mengontrol kecepatannya. Motor dc penguatan terpisah yang digunakan memiliki tegangan 240 V dan torsi 30 HP
Parameter motor dc penguatan terpisah selengkapnya dapat dilihat pada tabel 2:
Tabel 2. Spesifikasi Motor DC Penguatan Terpisah
Parameter Nilai
Daya 30 HP
Tegangan 240 V
Kecepatan 1750 rpm
Resistansi jangkar 0.2275 ohm Induktansi jangkar 0.002866 H Resistansi medan 102.3 ohm Induktansi medan 20.82 H
Inersia 0.1239 Kgm2
Induktansi mutual 0.401 H
III. SIMULASI DAN ANALISIS
A. Simulasi Konverter KY Inverse Bidirectional pada Motor DC Penguatan Terpisah dengan Torsi Nominal
Gambar 12 Pemodelan rangkaian konverter KY inverse bidirectional pada motor DC penguatan terpisah dengan torsi nominal berupa step
Pada gambar 12 di atas, motor dc penguatan terpisah dihubungkan konverter KY inverse bidirectional dan baterai dengan tegangan 180 V. Rangkaian tersebut dikontrol oleh kontrol kecepatan sehingga kecepatan motor akan tetap. Motor diberi torsi beban nominal.
Motor dc penguatan teerpisah ini kumparan medan yang disuplai oleh sumber lain selain baterai. Pada simulasi diatas kumparan medan diberi suplai oleh sumber tegangan dc.
Untuk mencari nilai torsi nominal pada rangkaian konverter KY inverse bidirectional pada motor DC penguatan terpisah ini yaitu nilai daya beban motor di bagi dengan kecepatan motor. 𝐷𝐷𝑑𝑑𝑑𝑑𝑑𝑑=𝐷𝐷𝑑𝑑𝑑𝑑𝑑𝑑 (𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑆𝑆𝐻𝐻𝐻𝐻) 𝑥𝑥 746 ……..(9) 𝐷𝐷𝑑𝑑𝑑𝑑𝑑𝑑= 30 ℎ𝑘𝑘𝑥𝑥 746 𝐷𝐷𝑑𝑑𝑑𝑑𝑑𝑑= 22.38 𝐾𝐾𝑊𝑊 𝑇𝑇𝑜𝑜𝑆𝑆𝑘𝑘𝑘𝑘𝑡𝑡𝑜𝑜𝑆𝑆𝑘𝑘𝑡𝑡𝑑𝑑𝑑𝑑 =𝑘𝑘𝑆𝑆𝑘𝑘𝑆𝑆𝑘𝑘𝑑𝑑𝑘𝑘𝑑𝑑𝑡𝑡𝐷𝐷𝑑𝑑𝑑𝑑𝑑𝑑 ……..(10) 𝑇𝑇𝑜𝑜𝑆𝑆𝑘𝑘𝑘𝑘𝑡𝑡𝑜𝑜𝑆𝑆𝑘𝑘𝑡𝑡𝑑𝑑𝑑𝑑 =22.381750𝑥𝑥𝐾𝐾𝑊𝑊2𝜋𝜋 60 𝑇𝑇𝑜𝑜𝑆𝑆𝑘𝑘𝑘𝑘𝑡𝑡𝑜𝑜𝑆𝑆𝑘𝑘𝑡𝑡𝑑𝑑𝑑𝑑 = 122 𝑁𝑁𝑆𝑆
Pada saat mobil listrik berjalan normal, keadaan baterai menyuplai motor (motoring) dengan step waktu 0 sampai 4 dengan torsi nominal 122 Nm, output pada motor tersebut memiliki kecepatan sebesar 174.6 rad/sec, torsi elektrik 126.2 Nm seperti pada gambar 1. Kecepatan dan torsi pada hasil simulasi diatas tidak sama persis seperti hasil perhitungan dan torsi beban yang diberikan karena terdapat rugi-rugi pada motor tersebut seperti gambar 14.
Pada saat keadaan motor menyuplai baterai (generating) yang artinya mobil listrik mengaalami pengeremansehingga torsi elektrik bernilai negatif. Dengan step waktu 4 sampai 6 detik hasil simulasi pada motor yaitu kecepatan pada motor bernilai 174.6 rad/sec, dan torsi elektrik sebesar -118.7 Nm seperti gambar 14.
(a)
(b)
Gambar 14 Hasil simulasi motoring dan generating (a) kecepatan motor (b) torsi elektrik
B. Simulasi Konverter KY Inverse Bidirectional pada Motor DC Penguatan Terpisah dengan Torsi Beban Bervariasi
Bila mobil listrik melewati jalan yang berkelok, torsi beban pada motor tersebut berbeda-beda sesuai jalan yang dilewati. Dengan kecepatan motor yang dijaga konstan dengan kontrol kecepatan. Mobil listrik memiliki kecepatan yang tetap meskipun berjalan menanjak atau menurun.
Bila mobil berjalan pada jalan yang lurus torsi beban pada mobil tersebut bernilai 122 Nm dan kecepatan tetap, sedangkan bila mobil tersebut berjalan menanjak maka torsi beban akan semakin besar yaitu 150 Nm dan kecepatan tetap. Jika mobil berjalan menurun maka torsi memiliki nilai yang berlawanan arah yaitu -122 Nm kecepatannya pun akan tetap seperti pada gambar 15 dan tabel 3.
Tabel 3. Torsi Beban Bervariasi dan Kecepatan konstan Torsi (T) (Nm) Kecepatan (rpm) Daya(P) (kW) 122 1750 22.38 150 1750 36.65 122 1750 22.38 -122 1750 22.38
Gambar 15 Hasil simulasi torsi elektrik dengan torsi bervariasi C.Simulasi Konverter KY Inverse Bidirectional pada Motor
DC Penguatan Terpisah dengan Kecepatan Bervariasi Ketika mobil listrik berjalan dengan kecepatan yang bervariasi dalam jarak 5 km setiap km mobil akan berjalan dengan kecepatan yang berbeda dengan daya yang tetap seperti pada tabel 4.
Tabel 4 Kecepatan bervariasi dalam 5 km/jam
Untuk menghitung kelajuan maka menggunakan persamaan sebagai berikut :
𝑣𝑣=𝑘𝑘𝑆𝑆𝑘𝑘𝑆𝑆𝑘𝑘𝑑𝑑𝑘𝑘𝑑𝑑𝑡𝑡 �𝑆𝑆𝑑𝑑𝑑𝑑𝑘𝑘𝑆𝑆𝑘𝑘� 𝑥𝑥𝑗𝑗𝑑𝑑𝑆𝑆𝑑𝑑𝑘𝑘 ……..(11) Apabila mobil listrik berjalan dengan kecepatan nominal maka torsi yang dihasilkan akan bernilai nominal. Kecepatan mobil listrik akan bertambah dari nilai nominalnya, torsinya pun lebih kecil daripada nilai nominalnya. Pada saat mobil listrik mengalami pengereman maka kecepatan motor tersebut akan berkurang dan torsi yang dihasilkan akan bernilai negatif seperti pada gambar 16 dan tabel 4.
Gambar 16 Hasil simulasi torsi elektrik dengan kecepatan bervariasi Kecepatan (ω) (rad/sec) Daya (P) (kW) Torsi (T) (Nm) Jarak (km) Kelajua n(v) (km/ja m) 183 22.38 122 1 183 200 22.38 111 1 200 183 22.38 122 1 183 150 22.38 -149 1 150 183 22.38 122 1 183
D. Simulasi Konverter KY Inverse Bidirectional pada Motor DC Penguatan Terpisah dengan Satu Saklar Konverter on
Gambar 17 Pemodelan rangkaian konverter KY inverse bidirectional pada motor DC penguatan terpisah dengan satu saklar pada konveter yang on dan kecepatan bervariasi
Pada gambar 17 diatas menunjukkan pada bagian converter mobil listrik hanya saklar S3 yang bekerja sedangkan S2 dan S1 tidak bekerja. Pada saat mobil listrik berjalan sesuai dengan kecepatan ratingnya maka nilai torsi elektrik pada motor dc tersebut juga sesuai dengan nilai nominalnya. Ketika mobil listrik berjalan sesuai dengan kecepatan melebihi ratingnya maka nilai torsi elektrik akan lebih kecil dari nilai nominalnya. Sebaliknya, bila mobil listrik berjalan pelan atau kecepatan lebih kecil dari nilai nominalnya maka torsi elektrik akan lebih besar dari nilai nominalnya. Kecepatan dan torsi memiliki hubungan yang berbanding terbalik. Bila torsi bernilai besar maka kecepatannya akan turun dan sebaiknya jika torsi bernilai kecil maka kecepatannya akan naik seperti pada gambar 18.
(a)
(b)
Gambar 18 Hasil simulasi rangkaian konverter KY inverse bidirectional pada motor DC penguatan terpisah dengan satu saklar konverter on (a) kecepatan motor (b) torsi elektrik
IV. KESIMPULAN
Pada tugas akhir ini dibuat desain dan dilakukan simulasi konverter KY inverse bidirectional pada motor dc penguatan terpisah untuk aplikasi mobil listrik
1. Konverter KY inverse dapat bekerja bidirectional/ dua arah untuk mengatur kecepatan mesin DC ketika bekerja sebagai motor maupun ketika mengalami pengereman sehingga bekerja sebagai generator. 2. Hasil simulasi didapatkan yaitu
a)Pada saat mobil listrik berjalan normal, keadaan baterai menyuplai motor (motoring) dengan kecepatan 1750 rpm torsi yang dihasilkan sebesar 122 Nm. Ketika mobil listrik mengalami pengereman, keadaan motor menyuplai baterai (generating) dengan kecepatan yang konstan yaitu 1750 rpm torsi yang dihasilkan sebesar -122 Nm.
b) Torsi beban lebih besar dari nominalnya yaitu 122 Nm sebagai contoh 150 Nm dengan kecepatan yang tetap yaitu 1750 rpm maka daya yang dibutuhkan adalah 36.65 kW yang lebih besar dari daya saat torsi nominal yaitu 22.38 kW. c)Ketika kecepatan kurang dari kecepatan
nominalnya yaitu 183 rad/sec sebagai contoh 150 rad/sec, torsi yang dihasilkan yaitu -100 Nm kurang dari torsi nominalnya yaitu 122 Nm dan kelajuannya pun kecil.
d) Saat salah satu konverter on, jika kecepatan lebih besar dari kecepatan nominalnya yaitu 183 rad/sec sebagai contoh 200 rad/sec maka torsi yang dihasilkan adalah 111 Nm yang lebih kecil dari torsi nominalnya yaitu 122 Nm.
DAFTARPUSTAKA
[1] Miley John & Sons.,” Electric Vehicle Technology Explained”, England.2003.
[2] http://indone5ia.wordpress.com/2011/09/02/sekilas-mengenai-konverter-dc-dc/
[3] Hwu K.I and Chen C.H.,”Bidirectional Control Of Inverse KY Converter”, IEEE Trans. Ind. Appl, 5-8 July,2009. [4] http://www.flixya.com/files-photo/a/f/d/afdilni-2399161.jpg [5] http://repository.usu.ac.id/bitstream/123456789/21583/ 3/Chapter%20II.pdf [6] http://repository.usu.ac.id/bitstream/123456789/21583/ 3/Chapter%20II.pdf
[7] Hwu K.I and Tau Y.T.”A novel Voltage-boosting Converter: KY Converter ”, IEEE , 2007.
[8] Chapman, Sephen J,”Electric Machinery fundamental 4th ed”,New York, America, 2005

![Gambar 2 Rangkaian konverter KY inverse bidirectional [3]](https://thumb-ap.123doks.com/thumbv2/123dok/2307205.2189035/2.918.72.850.92.656/gambar-rangkaian-konverter-ky-inverse-bidirectional.webp)