Konverter DC-DC Input Ganda Rasio Tinggi Sebagai
Pencatu Motor DC Brushless Permanen Magnet
Untuk Mobil Listrik
Pelix V. Bosco Purba, Heri Suryoatmojo, Mochamad AshariJurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh November (ITS) Jl. Arief Rahman Hakim, Surabaya 60111
E-mail: [email protected]
Abstrak-- Konveter input ganda memiliki beberapa topologi
salah satunya double input (DI) buckboost konverter. Pengaplikasian konverter input ganda untuk mobil listrik dapat berfungsi untuk menggabungkan dua buah sumber utama. Konverter double input buckboost memiliki sifat yang dapat menaikkan atau menurunkan tegangan input. Pada tugas akhir ini konverter tersebut dikembangkan untuk beroperasi dalam beberapa fungsi, yaitu sebagai penggabung dua sumber utama, pengatur kecepatan motor listrik dan mengatur tegangan output. Konverter DC input ganda menggunakan dua saklar yang dapat beroperasi komplemen (saklar satu konduksi sedangkan saklar yang lainnya padam) . Tegangan output konverter selanjutnya dihubungkan dengan motor permanent magnet brushless DC sebagai penggerak mobil listrik. Hasil simulasi menunjukkan bahwa konverter yang dikembangkan dapat menggabungkan dua buah sumber dengan baik. Kecepatan motor dapat dikendalikan sesuai dengan target yang diinginkan.
Katakunci--DI buckboost konverter, mobil listrik, motor dc
brushless
I. PENDAHULUAN
ENGGUNAAN konverter input ganda sudah cukup populer dalam bidang elektronika daya seperti aplikasi untuk sistem fuel cell, turbin angin, mobil listrik dan mobil hibrida. Penggunaan double input pada mobil listrik biasanya digunakan untuk menggabungkan sumber energi utama yang berbeda atau sumber energi yang independent sehingga menghasilkan sebuah sistem sumber energi yang handal,ringan dan mudah dikontrol. Keuntungan menggunakan konverter input ganda adalah mengurangi jumlah komponen yang digunakan, biaya yang murah dan cara pengontrolan yang mudah. Salah satu cara untuk membuat topologi konverter input ganda adalah dengan menggunakan saklar single pole triple throw (SPTT). Dengan menggunakan saklar tersebut akan dihasilkan beberapa topologi yang cocok untuk kendaraan listrik salah satunya adalah double input
buckbooost converter .
DI buckboost konverter memiliki sifat yang dapat menaikkan atau menurunkan tegangan input. Hal ini sangat bermanfaat dalam pengaturan suplai tegangan terhadap motor penggerak utama pada mobil listrik, terlebih apabila mobil listrik tersebut menggunakan motor permanen magnet DC
brushless. Dengan memvariasikan tegangan input pada motor
tersebut akan diperoleh kecepatan yang bervariasi.
DI buckboost konverter yang digunakan pada paper ini adalah
unidirectional oleh karena itu paper ini tidak membahas
tentang regenerative braking, dan mode yang digunakan adalah kontiniu. Lebih lanjut bab selanjutnya akan membahas tentang komponen-komponen yang digunakan dalam paper ini.
II. BATTERY ELECTRIC VEHICES
Konsep dari kendaraan listrik umumnya terdiri dari sumber energi, kontroler dan motor sebagai penggerak utamanya. Sumber energi yang digunakan pada paper ini adalah baterai, kontroler yaitu DI buckboost konverter dan motor penggerak adalah motor DC permanen brushless.
A. DI BUCKBOOST KONVERTER
Untuk memperoleh konverter input ganda dari beberapa topologi konverter yang sudah umum dapat menggunakan saklar (SPTT). Saklar SPTT merupakan saklar yang terdiri dari tiga kutub, dan hanya satu kutub yang dapat konduksi pada satu waktu. Gambar 1. menunjukkan rangkaian dari konverter buckboost input ganda dengan menggunakan saklar SPTT, terdapat tiga buah saklar yaitu saklar S1, S2 dan S3, yang dapat dimatikan dan dihidupkan secara individu. Bentuk pola penyalaan dari ketiga saklar tersebut dapat dilihat pada gambar 2. Penjelasan ketiga mode dari operasi saklar tersebut sebagai berikut:
Mode 1 (s1= on)
Pada mode ini V1 menyuplai energi kebeban dan induktor (L)
Mode 2 (s2= on)
Pada mode ini V2 menyuplai energi ke beban dan induktor (L)
Mode 3(s3=on)
Pada mode ini kedua supplai energi terputus dari rangkaian, sehingga energi yang tersimpan pada induktor akan dilepas kebeban. Kemudian induktor akan melepas muatan selama mode ini. Tegangan yang melewati induktor dapat dilihat pada tabel 1.
V1 V2 1 2 3 i1 i2 ic Vo VL IL L + _ R C + _ i3 io
Gambar 1. DI buckboost menggunakan saklar SPTT
Gambar 2. Salah satu pola penyalaan DI Buckboost konverter
Seperti yang dapat dilihat pada gambar 2, T1 merupakan waktu nyala untuk saklar S1, T2 merupakan waktu nyala untuk saklar S2 dan T3 merupalan waktu nyala untuk switch S3. T merupakan perioda total waktu penyalaan semua saklar S1,S2 dan S3, dan d1,d2 dan d3 adalah duty cyle dari saklar S1,S2, S3 secara berturut-turut. Dari gambar 2 dan tabel 1 dapat ditulis persamaan sebagai berikut:
(1) (2) (3) ( ) ( ) ( ) (4) Persamaan tersebut dapat disederhanakan menjadi
( ) (5) Dengan mengkombinasikan persamaan 1,2,3 dan 5 akan
diperoleh hubungan antara tegangan input dan output.
( ) (6) (7) Dengan menggunakan persaman 7, harus diingat bahwa
( )
Persamaan (7) digunakan untuk menentukan hubungan antara tegangan output dan tegangan input dari double input
buckboost. Saklar pada gambar 1 akan diganti dengan dioda
atau pun transistor tergantung pada tingkat tegangan sistem. Jika saklar diganti dengan menggunakan dioda dan transistor maka aliran daya harus satu arah, pada induktor harus selalu positif.
- Jika (S1 on maka S2 dan S3 off), IS1>0 ,VS2 = V2-V1, dan VS3 = -(V1+V0)
- Jika (S2 on maka S1 dan S3 off), IS2>0, VS1= V1-V2 dan VS3 = -(V2+Vo)
- Jika S3 on maka S1 dan S2 off), IS>0, VS1= V1+Vo, dan VS2 = V2 + Vo)
Dapat diamati bahwa saklar S1 konduksi untuk arus positif tetapi juga akan melawan tegangan positif ataupun negatif tergantung pada besaran dari tegangan V1 dan V2. Oleh karena itu saklar tersebut akan diganti dengan dioda,yang diserikan dengan transistor, sama halnya dengan saklar S2 diganti dengan dioda yang seri terhadap transistor. Untuk saklar S3 yang hanya konduksi untuk arus positif saja dan juga melawan tegangan negatif dapat diganti dengan dioda. Jadi rangkaian input ganda dapat dilihat pada gambar 3.
V1 V2 i1 ic VL IL L + _ R C S2 S1 D3 i3 D1 D2 i2 _ Vo + i0
Gambar 3. Gambar akhir DI buckboost menggunakan saklar SPTT
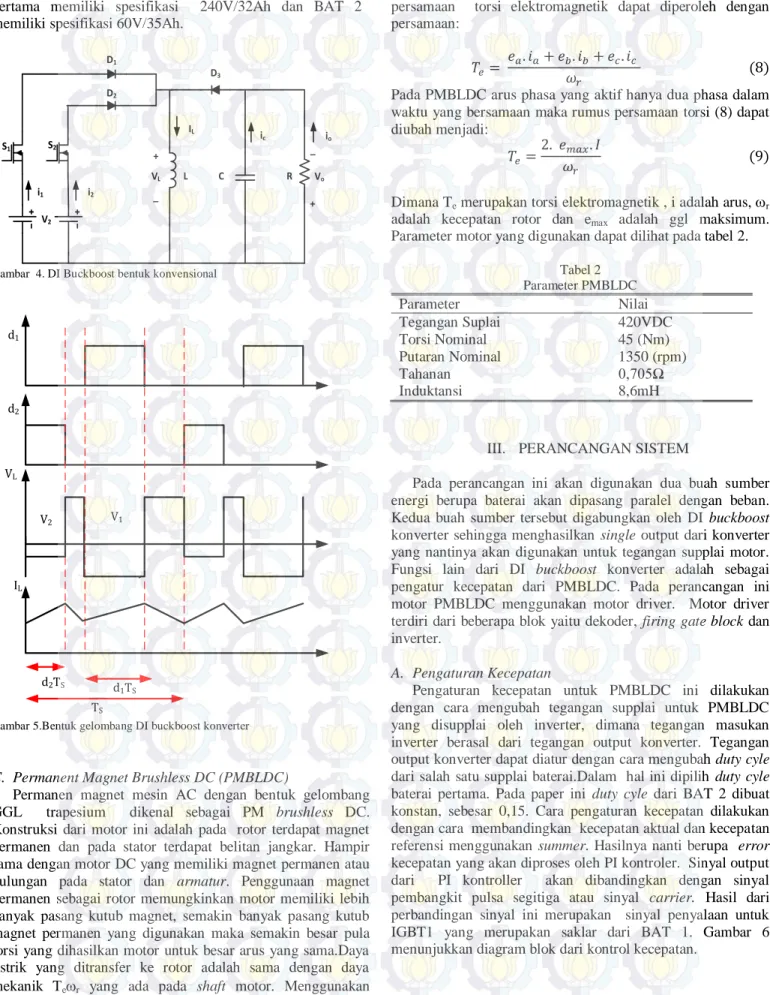
Gambar 3 dapat digambar ulang kedalam bentuk buckboost yang konvensional, seperti pada gambar 4. Dapat diperhatikan pada gambar tersebut terdapat tiga buah saklar dengan posisi yang berbeda tetapi mimiliki fungsi yang sama dengan gambar 3. Rangkaian pada gambar 4 ini yang nanti akan disimulasikan. Bentuk tegangan dan arus yang dihasilkan dari rangkaian pada gambar 4 dengan waktu on dan waktu off dari saklar s1 dan s2 dioperasikan berbeda, d1 dan d2 merupakan
duty cyle dari s1 dan s2. Bentuk arus induktor (IL) dan tegangan
yang melewati induktor (VL), dimana magnitudo V1 lebih besar dari V2 dapat dilihat pada gambar 5.
B. Baterai
pertama memiliki spesifikasi 240V/32Ah dan BAT 2 memiliki spesifikasi 60V/35Ah.
V2 i1 ic VL IL L + _ R C S2 D3 io D1 D2 + _ Vo i2 S1
Gambar 4. DI Buckboost bentuk konvensional
d1 d2 IL VL V2 V1 TS d2TS d 1TS
Gambar 5.Bentuk gelombang DI buckboost konverter
C. Permanent Magnet Brushless DC (PMBLDC)
Permanen magnet mesin AC dengan bentuk gelombang GGL trapesium dikenal sebagai PM brushless DC. Konstruksi dari motor ini adalah pada rotor terdapat magnet permanen dan pada stator terdapat belitan jangkar. Hampir sama dengan motor DC yang memiliki magnet permanen atau gulungan pada stator dan armatur. Penggunaan magnet permanen sebagai rotor memungkinkan motor memiliki lebih banyak pasang kutub magnet, semakin banyak pasang kutub magnet permanen yang digunakan maka semakin besar pula torsi yang dihasilkan motor untuk besar arus yang sama.Daya listrik yang ditransfer ke rotor adalah sama dengan daya mekanik Ter yang ada pada shaft motor. Menggunakan
persamaan torsi elektromagnetik dapat diperoleh dengan persamaan:
( ) Pada PMBLDC arus phasa yang aktif hanya dua phasa dalam waktu yang bersamaan maka rumus persamaan torsi (8) dapat diubah menjadi:
( )
Dimana Te merupakan torsi elektromagnetik , i adalah arus, r adalah kecepatan rotor dan emax adalah ggl maksimum. Parameter motor yang digunakan dapat dilihat pada tabel 2.
Tabel 2 Parameter PMBLDC Parameter Nilai Tegangan Suplai 420VDC Torsi Nominal 45 (Nm) Putaran Nominal 1350 (rpm) Tahanan 0,705Ω Induktansi 8,6mH
III. PERANCANGAN SISTEM
Pada perancangan ini akan digunakan dua buah sumber energi berupa baterai akan dipasang paralel dengan beban. Kedua buah sumber tersebut digabungkan oleh DI buckboost konverter sehingga menghasilkan single output dari konverter yang nantinya akan digunakan untuk tegangan supplai motor. Fungsi lain dari DI buckboost konverter adalah sebagai pengatur kecepatan dari PMBLDC. Pada perancangan ini motor PMBLDC menggunakan motor driver. Motor driver terdiri dari beberapa blok yaitu dekoder, firing gate block dan inverter.
A. Pengaturan Kecepatan
Gambar 6. Diagram blok kontrol kecepatan
B. Dekoder
Motor PMBLDC mengunakan sensor hall untuk mendeteksi posisi rotor. Sensor hall mengetahui posisi rotor dengan cara mendeteksi adanya medan magnet dari rotor Posisi rotor pada PMBLDC dibutuhkan untuk membentuk ggl balik yang berbentuk trapesium dan untuk membangkitkan torsi yang efektif. Rangkaian dekoder dari sensor hall dapat dilihat pada gambar 7.
C. Firing Gate Blok
Blok penyalaan atau disebut juga firing gate blok. Fungsi dari blok ini adalah untuk memberikan sinyal penyalaan pada gate inverter. Inputan blok ini yaitu berupa sinyal emf a,b,c. Sinyal emf a,b,c ini diperoleh dari sinyal output dekoder. Output dari blok ini berupa sinyal penyalaan logics inverter, seperti yang ditunjukkan pada gambar 8.
Gambar 7. Rangkaian dekoder sensor hall
Gambar 8. Rangkaian logika firing gate block
D. Inverter
Inverter yang digunakan pada perancangan ini adalah inverter jembatan tiga phasa, fungsinya sama seperti inverter pada umumnya yaitu mengubah arus searah menjadi arus bolak balik. Adapun inverter yang digunakan pada perancangan ini memiliki 6 buah switch yang setiap saklar akan konduksi sebesar 1200. Diagram blok dari inverter dapat dilihat pada gambar 8. Sinyal gate untuk inverter berasal dari output firing gate block
Gambar 9. Diagram Blok Inverter
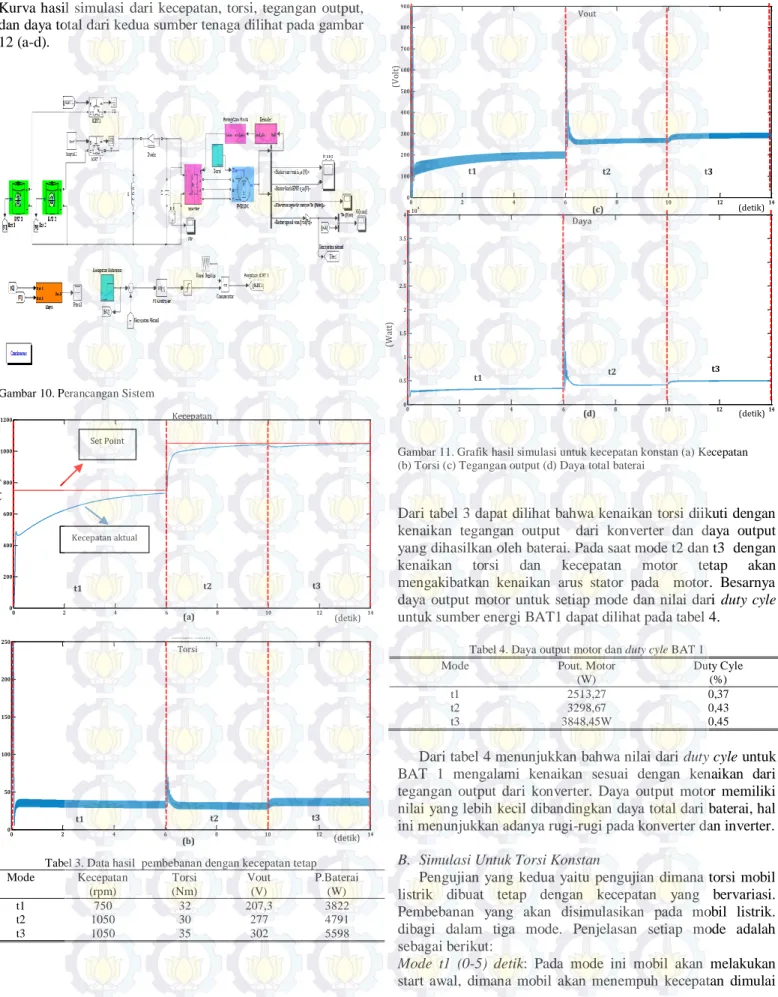
Hasil dari perancangan keseluruhan komponen dapat dilihat pada gambar 10.
IV. HASIL SIMULASI DAN ANALISIS
Untuk mengetahui hasil perancangan dapat berfungsi dengan baik perlu dilakukan simulasi. Simulasi yang akan dilakukan berupa pembebanan pada motor. Simulasi terdiri dari dua bagian yaitu simulasi pada mobil listrik dengan torsi yang bervariasi dengan kecepatan yang konstan dan pengujian torsi tetap kecepatan yang berubah-ubah. Pengamatan parameter yang akan dilakukan untuk kedua simulasi ini yaitu torsi, kecepatan, tegangan output konverter dan daya total pada baterai.
A. Simulasi Untuk Kecepatan Konstan.
Pengujian untuk simulasi ini terdiri dari tiga mode pembebanan yang akan disimulasikan dalam waktu 14 detik. Adapun penjelasan dari setiap mode pembebanan adalah:
Mode t1 (0-6) detik: Merupakan mode dimana mobil listrik
dalam keadaan start awal, pada mode ini kecepatan mobil listrik akan bergerak dari kecepatan 0 rpm menuju 750 rpm, dalam jangka waktu 6 detik. Torsi pada keadaan ini adalah sebesar 32Nm.
Mode t2 (6-10) detik: Mobil akan melakukan percepatan.
Kecepatan mobil nanti diharapkan sebesar 1050 rpm. Mode ini akan terjadi selama durasi waktu 4 detik. Torsi mobil pada mode ini akan menjadi 30Nm
Mode t3 (10-14) detik: Pada mode ketiga ini kecepatan mobil
Kurva hasil simulasi dari kecepatan, torsi, tegangan output, dan daya total dari kedua sumber tenaga dilihat pada gambar 12 (a-d).
Gambar 10. Perancangan Sistem
Tabel 3. Data hasil pembebanan dengan kecepatan tetap Mode Kecepatan (rpm) Torsi (Nm) Vout (V) P.Baterai (W) t1 750 32 207,3 3822 t2 1050 30 277 4791 t3 1050 35 302 5598
Gambar 11. Grafik hasil simulasi untuk kecepatan konstan (a) Kecepatan (b) Torsi (c) Tegangan output (d) Daya total baterai
Dari tabel 3 dapat dilihat bahwa kenaikan torsi diikuti dengan kenaikan tegangan output dari konverter dan daya output yang dihasilkan oleh baterai. Pada saat mode t2 dan t3 dengan kenaikan torsi dan kecepatan motor tetap akan mengakibatkan kenaikan arus stator pada motor. Besarnya daya output motor untuk setiap mode dan nilai dari duty cyle untuk sumber energi BAT1 dapat dilihat pada tabel 4.
Tabel 4. Daya output motor dan duty cyle BAT 1 Mode Pout. Motor
(W) Duty Cyle (%) t1 2513,27 0,37 t2 3298,67 0,43 t3 3848,45W 0,45
Dari tabel 4 menunjukkan bahwa nilai dari duty cyle untuk BAT 1 mengalami kenaikan sesuai dengan kenaikan dari tegangan output dari konverter. Daya output motor memiliki nilai yang lebih kecil dibandingkan daya total dari baterai, hal ini menunjukkan adanya rugi-rugi pada konverter dan inverter.
B. Simulasi Untuk Torsi Konstan
Pengujian yang kedua yaitu pengujian dimana torsi mobil listrik dibuat tetap dengan kecepatan yang bervariasi. Pembebanan yang akan disimulasikan pada mobil listrik. dibagi dalam tiga mode. Penjelasan setiap mode adalah sebagai berikut:
Mode t1 (0-5) detik: Pada mode ini mobil akan melakukan
start awal, dimana mobil akan menempuh kecepatan dimulai
dari 0 menuju 750 rpm. Pada mode ini mobil listrik memiliki torsi sebesr 32Nm. Mode ini akan berlangsung selama 5 detik.
Mode t2 (6-10) detik: Merupakan mode ketika mobil akan
mengalami percepatan sebesar 300 rpm, dari mode sebelumnya. Torsi pada mobil adalah sebesar 30Nm. sampai detik ke-10.
Mode t3 (10-14) detik: Pada mode ketiga ini kecepatan mobil
menjadi 1200 rpm dan torsi mobil dibuat tetap 30Nm.
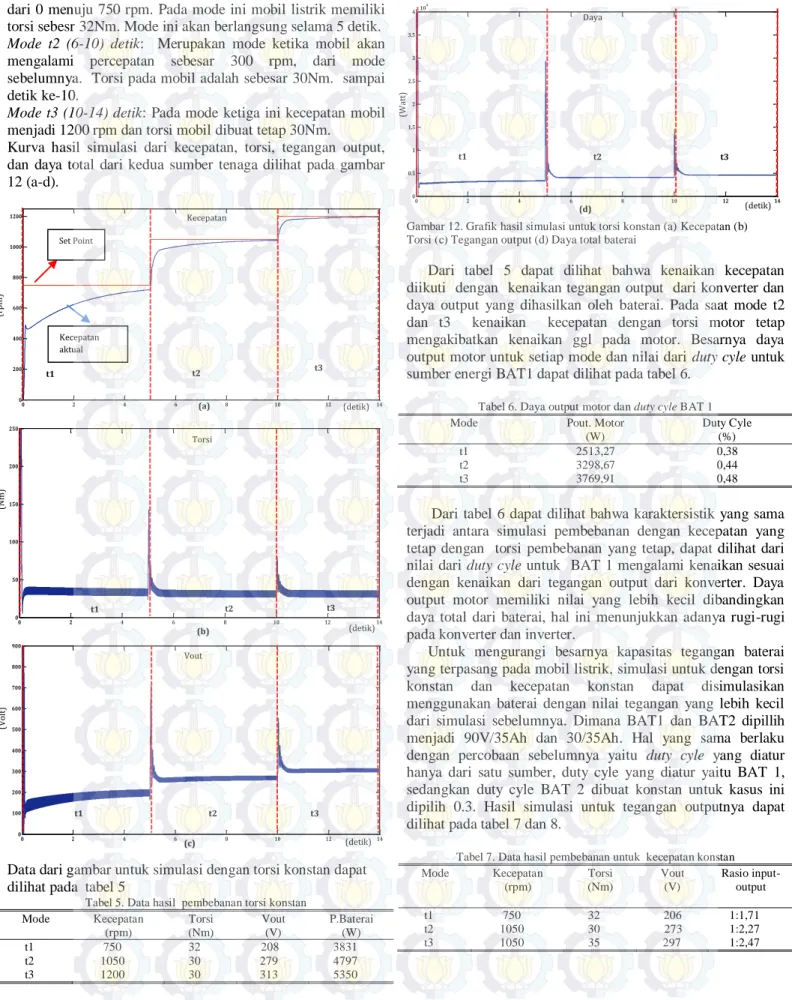
Kurva hasil simulasi dari kecepatan, torsi, tegangan output, dan daya total dari kedua sumber tenaga dilihat pada gambar 12 (a-d).
Data dari gambar untuk simulasi dengan torsi konstan dapat dilihat pada tabel 5
Tabel 5. Data hasil pembebanan torsi konstan Mode Kecepatan (rpm) Torsi (Nm) Vout (V) P.Baterai (W) t1 750 32 208 3831 t2 1050 30 279 4797 t3 1200 30 313 5350
Gambar 12. Grafik hasil simulasi untuk torsi konstan (a) Kecepatan (b) Torsi (c) Tegangan output (d) Daya total baterai
Dari tabel 5 dapat dilihat bahwa kenaikan kecepatan diikuti dengan kenaikan tegangan output dari konverter dan daya output yang dihasilkan oleh baterai. Pada saat mode t2 dan t3 kenaikan kecepatan dengan torsi motor tetap mengakibatkan kenaikan ggl pada motor. Besarnya daya output motor untuk setiap mode dan nilai dari duty cyle untuk sumber energi BAT1 dapat dilihat pada tabel 6.
Tabel 6. Daya output motor dan duty cyle BAT 1 Mode Pout. Motor
(W) Duty Cyle (%) t1 2513,27 0,38 t2 3298,67 0,44 t3 3769,91 0,48
Dari tabel 6 dapat dilihat bahwa karaktersistik yang sama terjadi antara simulasi pembebanan dengan kecepatan yang tetap dengan torsi pembebanan yang tetap, dapat dilihat dari nilai dari duty cyle untuk BAT 1 mengalami kenaikan sesuai dengan kenaikan dari tegangan output dari konverter. Daya output motor memiliki nilai yang lebih kecil dibandingkan daya total dari baterai, hal ini menunjukkan adanya rugi-rugi pada konverter dan inverter.
Untuk mengurangi besarnya kapasitas tegangan baterai yang terpasang pada mobil listrik, simulasi untuk dengan torsi konstan dan kecepatan konstan dapat disimulasikan menggunakan baterai dengan nilai tegangan yang lebih kecil dari simulasi sebelumnya. Dimana BAT1 dan BAT2 dipillih menjadi 90V/35Ah dan 30/35Ah. Hal yang sama berlaku dengan percobaan sebelumnya yaitu duty cyle yang diatur hanya dari satu sumber, duty cyle yang diatur yaitu BAT 1, sedangkan duty cyle BAT 2 dibuat konstan untuk kasus ini dipilih 0.3. Hasil simulasi untuk tegangan outputnya dapat dilihat pada tabel 7 dan 8.
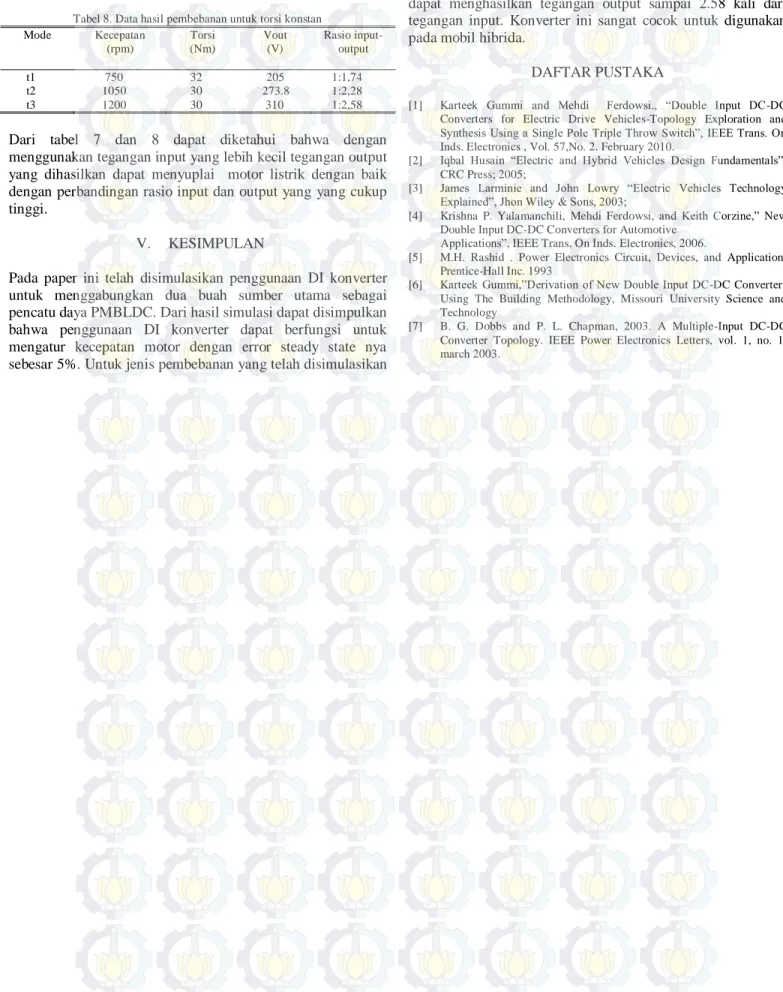
Tabel 8. Data hasil pembebanan untuk torsi konstan Mode Kecepatan (rpm) Torsi (Nm) Vout (V) Rasio input-output t1 750 32 205 1:1,74 t2 1050 30 273.8 1:2,28 t3 1200 30 310 1:2,58
Dari tabel 7 dan 8 dapat diketahui bahwa dengan menggunakan tegangan input yang lebih kecil tegangan output yang dihasilkan dapat menyuplai motor listrik dengan baik dengan perbandingan rasio input dan output yang yang cukup tinggi.
V. KESIMPULAN
Pada paper ini telah disimulasikan penggunaan DI konverter untuk menggabungkan dua buah sumber utama sebagai pencatu daya PMBLDC. Dari hasil simulasi dapat disimpulkan bahwa penggunaan DI konverter dapat berfungsi untuk mengatur kecepatan motor dengan error steady state nya sebesar 5%. Untuk jenis pembebanan yang telah disimulasikan
dapat menghasilkan tegangan output sampai 2.58 kali dari tegangan input. Konverter ini sangat cocok untuk digunakan pada mobil hibrida.
DAFTAR PUSTAKA
[1] Karteek Gummi and Mehdi Ferdowsi., “Double Input DC-DC Converters for Electric Drive Vehicles-Topology Exploration and Synthesis Using a Single Pole Triple Throw Switch”, IEEE Trans. On Inds. Electronics , Vol. 57,No. 2. February 2010.
[2] Iqbal Husain “Electric and Hybrid Vehicles Design Fundamentals”, CRC Press; 2005;
[3] James Larminie and John Lowry “Electric Vehicles Technology Explained”, Jhon Wiley & Sons, 2003;
[4] Krishna P. Yalamanchili, Mehdi Ferdowsi, and Keith Corzine,” New Double Input DC-DC Converters for Automotive
Applications”, IEEE Trans. On Inds. Electronics, 2006.
[5] M.H. Rashid . Power Electronics Circuit, Devices, and Application. Prentice-Hall Inc. 1993
[6] Karteek Gummi,”Derivation of New Double Input DC-DC Converters Using The Building Methodology, Missouri University Science and Technology