NASKAH PUBLIKASI
SISTEM INFORMASI
PEMANTAU PENGANGKUTAN ZAT RADIOAKTIF
BERBASIS
GOOGLE MAPS
Untuk memenuhi sebagian persyaratan memperoleh gelar Sarjana Sains Terapan pada Program Diploma IV
Program Studi Elektronika Instrumentasi Jurusan Teknofisika Nuklir
Oleh:
PURWANTORO NIM. 041100120
SEKOLAH TINGGI TEKNOLOGI NUKLIR
BADAN TENAGA NUKLIR NASIONAL
YOGYAKARTA
ii
HALAMAN PERSETUJUAN NASKAH PUBLIKASI
SISTEM INFORMASI
PEMANTAU PENGANGKUTAN ZAT RADIOAKTIF
BERBASIS
GOOGLE MAPS
Oleh : PURWANTORO
041100120
Telah diperiksa dan disetujui pada tanggal: Juli 2013 Oleh:
Pembimbing I Pembimbing II
Ir. Djiwo Harsono, M.Eng Adi Abimanyu, S.ST NIP. 19590202 198512 1 001 NIP. 19820930 2009901 1 002
Ketua Jurusan Teknofisika Nuklir SEKOLAH TINGGI TEKNOLOGI NUKLIR
BADAN TENAGA NUKLIR NASIONAL
SISTEM INFORMASI PEMANTAU PENGANGKUTAN ZAT RADIOAKTIF BERBASIS GOOGLE MAPS
Purwantoro, Djiwo Harsono, Adi Abimanyu
Jurusan Teknofisika Nuklir,
Sekolah Tinggi Teknologi Nuklir – Badan Tenaga Nuklir Nasional Jl. Babarsari PO BOX 6101/YKBB Yogyakarta 55281
Telp : (0274)48085; Fax : (0274)489715
Homepage: www.sttn-batan.ac.id E-mail: [email protected]
ABSTRAK
SISTEM INFORMASI PEMANTAU PENGANGKUTAN ZAT
RADIOAKTIF BERBASIS GOOGLE MAPS. Pembuatan prototipe perangkat monitoring radiasi yang dipadukan dengan Global Positioning System dengan fitur online monitoring yang berbasis pada teknologi Short Message Service yang disebut sebagai In Vehicle Module Radioactive Monitoring System. Perangkat ini mengirimkan data ke Control Room Module
dalam bentuk teks dengan jumlah 38 karakter melalui teknologi Short Message Service. Diperlukan perangkat lunak yang dapat menampilkan data dari In Vehicle Module Radioactive Monitoring System pada peta sehingga menjadi informasi realtime melalui komunkasi nirkabel. Perangkat lunak ini dibuat menggunakan bahasa pemrograman php dan MySQL sebagai databasenya. Untuk antar muka penerimaan data digunakan Gammu yang berperan sebagai
SMS Gateway. Data SMS yang diterima selanjutnya diparsing untuk menjadi sebuah data koordinat dan ditampilkan pada peta digital online Google Maps. Hasil yang diperoleh adalah sebuah peta online berbasis web yang bisa menampilkan posisi, waktu dan paparan radiasi setiap jarak 2 menit dari pengangkut zat radioaktif. Data yang telah dikirim disimpan pada database yang dapat diakses pada waktu mendatang jika dibutuhkan. Waktu realtime
untuk pemrosesan setiap data SMS adalah ± 8 detik dengan akurasi posisi pada lingkungan terbuka adalah <6 meter dan pada kondisi lingkungan padat adalah ±17 meter
Kata kunci : monitoring, pengangkutan zat radioaktif, google maps, gps, sms
ABSTRACT
INFORMATION SYSTEM MONITORING RADIOACTIVE
communication. The software is built using PHP and MySQL as the database. For receiving data interface used Gammu as SMS Gateway. Subsequently received SMS data to be parsed and displayed an coordinate data on the map Google Maps. The result is a web-based online maps that can show position, time and radiation exposure every 2 minutes distance from transport of radioactive substances. The data have been sent are stored in a database that can be accessed in the future if needed. Realtime processing time for each SMS data is ± 25 seconds with an accuracy of positioning in open environments are <6 meters and on solid environmental conditions is ± 17 meters.
Keywords: monitoring, transport of radioactive materials, google maps, gps, sms
PENDAHULUAN
In Vehicle Module Radioactive Monitoring Sistem (IVM-RMS) merupakan sub sistem yang ditempatkan pada trans portasi pengangkut zat radioaktif yang terdiri dari modul berbasis mikrokontroler dengan modul GPS Receiver dan GSM
modem serta dilengkapi dengan detektor radiasi. GPS receiver merupakan teknologi yang memanfaatkan komunikasi satelit untuk menentukan lokasi dalam bentuk koordinat. Sedangkan GSM modem merupakan teknologi komuniasi data yang menggunakan jaringan selullar. IVM-RMS akan mengumpulkan informasi yang terdiri dari informasi posisi berupa koordinat lintang dan bujur, waktu serta informasi laju paparan radiasi, kemudian mengirim kannya ke Control Room Module melalui komunikasi nirkabel berbasis Short Message Service (SMS)[1].
Pembuatan Sistem Informasi Peman tau Pengangkutan Zat Radioaktif Berbasis
Google Maps merupakan pengembangan
dari Pembuatan Perangkat Lunak Penampil, Penyimpan Dan Pengiriman Data GPS Survey Meter Dengan PC Melalui Port USB [2]. Pada sistem ini akan dibuat perangkat lunak berbasis web untuk menampilkan koordinat posisi kendaraan pengangkut zat radioaktif serta paparan radiasinya pada peta online berbasis
Google Maps.
Sistem ini dikembangkan dengan menggunakan bahasa pemrograman web PHP dengan pendukung webserver
XAMPP, SMS Gateway Gammu dan
database MySQL. Pengujian dilakukan
dengan menempatkan IVM-RMS pada suatu tempat dan menunggu alat tersebut mengirimkan data. Data dikirimkan setiap 2 menit sekali dan akan langsung diproses oleh SMS Gateway Gammu untuk disimpan pada database MySQL. Setiap SMS yang masuk akan diproses oleh program yang dibuat menggunakan bahasa pemrograman PHP. Data SMS yang masuk di–pharsing (dipisahkan) menjadi infor masi berupa waktu, koordinat dan paparan radiasi. Hasilnya dapat diamati pada peta yang diakses melalui browser internet.
Jadi Sistem Informasi Pemantau Pengangkutan Zat Radioaktif Berbasis Google Maps adalah sebuah perangkat lunak berbasis web yang dapat memberikan informasi posisi kendaraan dan paparan radiasi zat radioaktif yang dibawa pada sebuah peta online berbasis
Google Maps.
TEORI DAN TATA KERJA
Sistem informasi pemantau pengang kutan zat radioaktif terdiri dari dua sub sistem utama yaitu In Vehicle Module
Radioactive Monitoring System dan
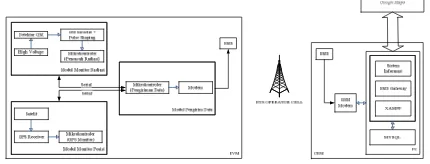
Radioactive Monitoring System (IVM-RMS) adalah alat yang ditempatkan pada transportasi pengangkut zat radioaktif. Alat ini berupa sistem berbasis mikrokontroler dengan modul GPS dan GSM modem dan dilengkapi dengan alat detektor radiasi, seperti terlihat pada gambar blok diagram IVM-RMS pada Gambar 1. IVM-RMS akan mengumpulkan data radiasi, lokasi dan waktu kemudian mengirimkannya ke
Control Room Module melalui komunikasi
nirkabel.
Gambar 1. Blok Diagram IVM-RMS [2].
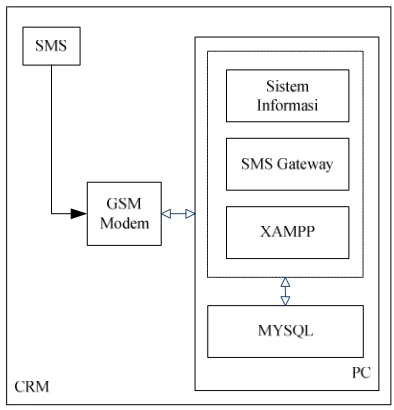
Control Room Module (CRM)
terdiri PC, telepon genggam GSM yang memiliki fasilitas modem atau modem GMS yang mendukung perintah AT-COMMAND, pengolah database dan pengolah data SMS. CRM dapat ditempatkan dimana saja selama ada sinyal GSM. Modul ini berfungsi sebagai penerima dan pengolah data untuk selanjutnya disimpan dalam basis data dan ditampilkan pada peta berbasis Google Maps. Blok diagram CRM dapat dilihat pada Gambar 2.
Pada sub sistem IVM-RMS digunakan teknologi GPS yaitu sistem satelit navigasi dan penentuan posisi menggunakan satelit. Sistem ini dapat digunakan oleh banyak orang sekaligus, didesain untuk memberikan posisi dan kecepatan tiga dimensi yang teliti, dan juga informasi mengenai waktu secara kontinyu di seluruh dunia.
Gambar 2. Blok Diagram CRM.
GPS bekerja dengan cara mengumpulkan data dari minimal 3 satelit, masing-masing mengenai jarak dari sebuah titik di bumi (GPS receiver) bersamaan dengan lokasi satelit tersebut. Dari semua data itu, lokasi titik (GPS receiver) dapat ditentukan dengan cara menerapkan konsep triangulasi. Ketelitian posisi yang dihasilkan oleh GPS mempunyai spektrum yang sangat luas dari ketelitian orde milimeter sampai dengan puluhan meter. Luasnya spektrum ketelitian yang bisa diberikan memungkinkan penggunaan GPS secara efektif sesuai dengan ketelitian yang diinginkan[3].
Namun demikian GPS juga mempunyai kekurangan yang harus diperhatikan, agar alat penerima sinyal GPS dapat menerima sinyal GPS, maka tidak boleh ada penghalang antara penerima dan satelit yang bersangkutan. Seperti halnya didaerah yang bannyak pepohonan ataupun gedung-gedung tinggi[3].
Dari berbagai format penulisan koordinat, ada tiga macam format koordinat yang dipakai pada GPS sebagai titik penentu lokasi suatu area, yakni:
dan detik (seconds), disebut juga DMS.
Format: derajat menit detik koma detik (dd mm ss.ss)
2. Koordinat yang mengandung derajat (degree) dan menit (minutes), disebut juga MinDec. Format: derajat menit koma menit (dd mm.mmmm)
Ketentuan:
Pada kasus dimana tidak ada keterangan lintang dan bujur, maka: Pada Latitude, tanda ”-” menyatakan Selatan/South, dan pada Longitude tanda “-“ mewakili Barat / West
3. Koordinat yang mengandung derajat saja (DegDec)
Format: derajat koma derajat (dd.dddddd)
Pada kasus dimana tidak ada keterangan lintang dan bujur, maka: Pada Latitude, tanda ”-” menyatakan Selatan/South, dan pada Longitude tanda “-“ mewakili Barat / West
Pengembangan sistem informasi berbasis web menggunakan bahasa pemrograman Hypertext Preprocessor atau sering disebut PHP yaitu bahasa scripting
yang menyatu dengan HTML dan dijalankan pada server side [4]. Untuk penyimpanan data digunakan MySQL, sebuah sistem basis data yang bersifat
client-server. MySQL dapat berjalan
mencapai 100 akses secara berkesinam bungan dan dapat menangani basis data yang berukuran sampai dengan 100 gigabyte dengan jumlah record yang bisa ditangani sampai dengan 50 juta.
Untuk menampilkan peta pada sistem informasi ini digunakan Google Maps.
Google Maps adalah sebuah peta digital yang merupakan bagian dari sistem GIS modern dan paling banyak digunakan saat ini. Tidak perlu melakukan digitasi peta sendiri karena google maps sudah mencakup peta dari seluruh dunia. Kita dapat menambahkan fitur Google Maps
dalam web kita sendiri dengan Google Maps API. Google Maps API adalah sebuah library JavaScript[5].
Google Maps menyediakan layanan
script API yang kaya dan bisa
dikembangkan. Google Maps API menye diakan kumpulan objek dan metode yang memungkinkan untuk mengintegrasikan
Google Maps kedalam sebuah website. Pada Google Maps API terdapat 4 jenis pilihan model peta yang disediakan oleh Google, diantaranya adalah: Roadmap,
Satellite, Terrain dan Hybrid.
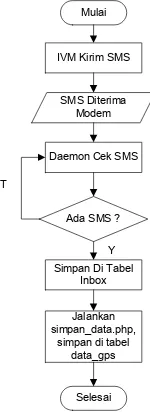
Cara Kerja
IVM-RMS ditempatkan pada pengangkut zat radioaktif. Alat ini akan mengumpulkan data posisi dari Modul GPS, data paparan dari modul monitor radiasi dan mengirimkan data tersebut dalam bentuk SMS ke CRM setiap jangka waktu tertentu. SMS diterima oleh CRM dan diproses kedalam basis data menggunakan bantuan perangkat lunak GAMMU dan skript PHP. Dari proses tersebut akan didapat data berupa waktu, tanggal, koordinat lintang, koordinat bujur dan besar paparan radiasi. Data koordinat selajutnya ditampilkan menggunakan script
PHP menjadi sebuah informasi posisi kendaraan pengangkut zat radioaktif pada peta berbasis google maps. Blok diagram sistem informasi pemantau pengangkutan zat radioaktif berbasis google maps dapat dilihat pada Gambar 3.
Gambar 3. Sistem Informasi Pemantau Pengangkutan Zat Radioaktif
Bahan
3. Perangkat Lunak Notepad ++
4. Perangkat Lunak GAMMU SMS Gateway
5. Perangkat Lunak XAMPP 6. Perangkat Lunak Hyperterminal
Peralatan
1. In Vehicle Module Radioactive
Monitoring System
2. Modem GSM Wavecom M1306B USB 3. Laptop
METODOLOGI
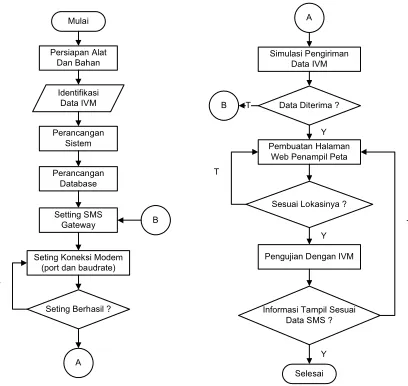
Diagram alir pelaksanaan kegiatan pembuatan sistem informasi pemantau pengangkutan zat radioaktif berbasis
google maps ditunjukkan pada Gambar 4. Pembuatan sistem informasi ini hanya terbatas pada pembuatan perangkat lunak untuk penerimaan data sms dan penampil posisi pada peta berbasis google maps.
Gambar 4. Langkah Kerja Pembuatan Sistem Informasi
Inisialisasi Modem
Modem yang digunakan adalah Wavecom seri 1306B dengan koneksi USB. Inisialisasi ini bertujuan untuk mengetahui port mana yang digunakan modem, yang selanjutnya akan digunakan SMS Gateway untuk berkomunikasi. Langkah untuk Inisialisasi Modem adalah :
Menyambungkan modem pada salah satu port usb di komputer.
Mengecek port yang dipakai melalui menu Start – Control Panel – Device Manager
Pada Port(COM & LPT) akan muncul modem yang kita tancapkan sebelumnya yaitu Prolific
USB-to-Serial Comm Port (COM15), tampak
seperti pada Gambar 5.
Gambar 5. Inisiasi Port Modem
Konfigurasi SMS Gateway
Membuat file konfigrasi gammurc me nggunakan aplikasi bantu notepad++ dengan script sebagai berikut :
[gammu] Port = com15:
Connection = at115200
Membuat file konfigurasi smsdrc me nggunakan aplikasi bantu notepad++ dengan script sebagai berikut :
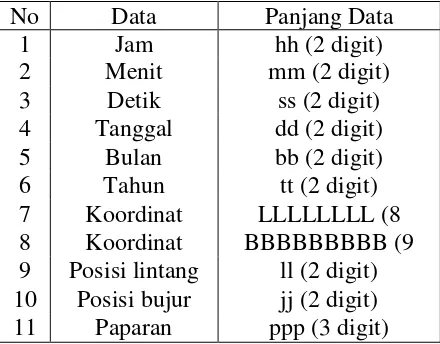
sendtimeout = 600 karakter alphabet dengan format *hhmmss ddbbttLLLLLLLLBBBBBBBBBlljjppp#. Dalam data SMS 38 karakter tersebut mengadung beberapa informasi, sehingga perlu dilakukan identifikasi dari masing masing fungsinya, dan didapatkan data yang dapat dilihat pada Tabel 1.
Tabel 1. Identifikasi data SMS dari IVM-RMS yang terdapat pada sms yang diterima dari IVM-RMS, berikut adalah tabel isi SMS. Contoh SMS yang diterima adalah *090527170613074667931102485648369 081#
Dari contoh tersebut pada Tabel 2 didapatkan koordinat lintang adalah 0746.6793 S dan koordinat bujur 11024.8564 E. Format dari data koordinat diatas adalah 07 derajat 46.6793 menit lintang selatan dan 110 derajat 24.8564
menit bujur timur, dari data lintang dan bujur diatas jenis koordinat tersebut adalah derajat menit (DegMin) dengan format ddmm.mmmm untuk lintang dan dddmm.mmmm untuk bujur.
Tabel 2. Contoh Isi SMS Yang Diterima CRM
Field Isi Deskripsi
Waktu 090527 hhmmss Tanggal 170613 ddmmyy Koordinat 07466793 ddmm.mmmm Koordinat 110248564 dddmm.mmmm
Posisi 83 ASCII Code Posisi 69 ASCII Code Paparan 081 Desimal
Sedangkan format yang didukung oleh google maps adalah koordinat jenis
decimal. Format koordinat lintang dalam format decimal adalah dd.ddddd, untuk membedakan posisi lintang maka ditambahkan tanda min (-) untuk posisi lintang selatan (S). Format koordinat bujur dalam decimal adalah ddd.ddddd, untuk membedakan posisi bujur maka ditambahkan tanda min (-) untuk posisi bujur barat (W).
Supaya koordinat yang didapatkan bisa digunakan oleh google maps sebagai acuan untuk menampilkan posisi pada peta, perlu dilakukan konversi koordinat dari format derajat menit menjadi format decimal.
Untuk mengkonversi koordinat me njadi format decimal digunakan persamaan 1 dan persamaan 2.
Konversi ddmm.mmmm ke dd.ddddd : 0.ddddd = mm.mmmm/60...(1) dd.ddddd= dd + 0.ddddd ...(2)
retrieving SMS ditunjukkan pada Gambar 6.
HASIL DAN PEMBAHASAN
Hasil yang diperoleh adalah sebuah perangkat lunak berbasis web yang menampilkan posisi pada peta google maps. Dapat dilihat pada Gambar 7.
Gambar 6. Diagram Alir Proses Retrieving SMS
Gambar 7. Halaman Peta Menampilkan Titik Posisi Hasil Pemantauan
Halaman peta ini menampilkan peta
google maps dengan tipe roadmap.
Informasi yang ditampilkan adalah posisi pengangkut sesuai titik koordinat yang dikirimkan oleh IVM-RMS. Pada setiap titik-titik koordinat yang ditampilkan akan menampilkan informasi berupa jam, tanggal, koordinat dan paparan radiasinya
ketika dipilih oleh mouse. Pada halaman ini juga ditampilkan tabel yang berisi data posisi yang ditampilkan pada peta, informasi berupa data tabular ini membantu untuk mengidentifikasi urutan posisi yang ditampilkan pada peta
Pengujian
Pengujian bertujuan untuk mengetahui posisi pada peta Google Maps
dari IVM-RMS dalam keadaan diam (tidak bergerak), pengujian juga dilakukan untuk mengetahui response time terhadap penerimaan SMS sampai dengan proses disimpan dalam basis data, uji coba dilakukan dengan cara meletakkan IVM-RMS pada satu posisi tertentu selama jangka waktu tertentu dan mengirimkan konfirmasi/permintaan info lokasi setiap jangka waktu yang telah ditentukan. Pengujian dilakukan tanggal 17 Juni 2013 pada lokasi di Laboratorium Elektronika PTAPB-BATAN, Pos Satpam Pintu Timur PTAPB-BATAN, Lantai IV Gedung BATAN, Depan Kantin STTN-BATAN
Pengujian Lokasi Pertama
Pengambilan data posisi pada lokasi pertama dengan meletakan IVM di ruangan Laboratorium Elektronika PTAPB-BATAN dengan posisi didekat jendela dengan gedung tinggi disekitarnya.
Gambar 8. Sebaran Koordinat Pengujian Posisi Lokasi Pertama
Terlihat bahwa jarak terjauh pada Pengujian lokasi pertama adalah dari
*
& +
, - . /
-&
no.486 ke no.485 (-7.778140,110.414314) ke (-7.777740,110.414215) Jarak terdekat pada pengujian lokasi pertama adalah dari no. 487 ke 483 (-7.777770, 110.414299) ke (-7.777758, 110.414299) Perhitungan jarak menggunakan persamaan haversine formula, menunjukkan bahwa range jarak terjauh adalah 45,56 m , dan range jarak terdekat adalah 2,21 m dengan jarak simpangan rata-rata 17,06 m. Grafik sebaran koordinat yang diperoleh dapat dilihat pada Gambar 8.
Pengujian Lokasi Kedua
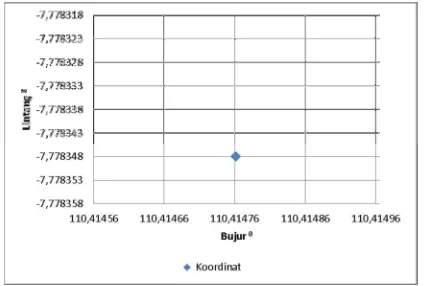
Pengujian posisi alat pada lokasi kedua dilakukan dengan meletakan IVM di area terbuka yaitu di depan pos satpam pintu timur PTABP-BATAN. Lokasi kedua ini cenderung pada lingkungan yang terbuka.
Gambar 9. Sebaran Koordinat Pengujian Posisi Lokasi Kedua
Dari Gambar 9 dapat dilihat bahwa koordinat tidak mengalami perubahan selama pengujian, ini menunjukan GPS Receiver tetap mendapatkan sinyal dari satelite dengan posisi yang tidak berubah.
Pengujian Lokasi Ketiga
Pengujian posisi alat pada lokasi ketiga dilakukan di Laboratorium Instrumentasi Nuklir STTN-BATAN Lantai 4 dengan posisi IVM dekat dengan jendela.
Gambar 10. Sebaran Koordinat Pengujian Posisi Lokasi Ketiga
Hasil pengujian posisi pada lokasi ketiga pada Gambar 10 terlihat bahwa koordinat yang diperoleh adalah sama. Hal ini menunjukkan GPS Receiver tetap mendapatkan sinyal dari satelite dengan posisi yang tidak berubah atau dengan simpangan 0 m.
Pengujian Lokasi Keempat
Gambar 11. Sebaran Koordinat Pengujian Posisi Lokasi Keempat
Pengujian Response Time
Response time pada sistem
informasi pemantau pengangkutan zat radioaktif tentukan dari waktu data diambil ,data diterim sampai dengan data diproses untuk disimpan dalam basis data. Data selisih waktu ini ambil dari pengujian posisi pada lokasi pertama sampai dengan pengujian posisi pada lokasi keempat.
Dari pengujian yang dilakukan, waktu paling lama yang diperlukan dari pengambilan data sampai dengan sms diterima adalah 6 detik dan waktu paling cepat adalah 3 detik dengan rata-rata 3 detik. Sedangkan waktu paling lama yang dibutuhkan untuk pemrosesan sms sampai disimpan dalam basis data adalah 2 menit 19 detik dan waktu tercepat nya adalah 1 detik dengan rata rata 5 detik.
Analisis dan Evaluasi
Pada pengujian lokasi pertama dengan IVM diam terlihat bahwa walaupun dalam keadaan diam namun IVM tetap tidak dapat memberi informasi titik lokasi yang pasti. Hal ini dapat dikarenakan masalah sinyal satelit, kondisi lingkungan, dan memang batasan kemampuan dari GPS Receiver nya sendiri. Pergeseran posisi rata-rata pada pengujian lokasi pertama sebesar 17,06 meter. Pada pengujian lokasi kedua dengan rentang waktu lebih singkat dengan lokasi yang relatif terbuka menunjukkan posisi yang sama, menandakan IVM bekerja dalam kondisi stabil atau dalam keadaan yang sama. Pada
pengujian lokasi ketiga mengambil lokasi pada ketinggian yaitu di Laboratorium Instrumentasi Nuklir STTN-BATAN Lantai 4 menunjukkan posisi yang sama. Selanjutnya pada pengujian lokasi keempat IVM diletakan pada posisi yang dihimpit gedung tinggi yaitu di depan kantin STTN-BATAN. Diperoleh pergeseran posisi rata rata sebesar 12,69 meter.
Pada pengujian dengan IVM diam terlihat jarak terjauh yang sangat melenceng dari spek GPS Receiver yang memiliki range 6 meter, yakni 45,56 meter dan 41,08 meter. Hal ini dapat disebabkan karena kondisi sinyal yang tidak stabil dan kondisi lingkungan sekitar yang terdapat bangunan tinggi. Pada pengujian lokasi pertama lokasi berada didalam gedung walaupun IVM diletakkan didekat jendela dan disekitar lokasi banyak terdapat gedung tinggi. Kemudian pengujian lokasi keempat berada pada lokasi yang dihimpit gedung tinggi. Namun dari diskusi yang dilakukan, penyebab lain yang mempengaruhi adalah jumlah satelite yang digunakan dalam perhitungan posisi koordinat. GPS Receiver di IVM diseting untuk menggunakan satelit sebanyak 3 buah. Memang hal ini mempunyai keuntungan yaitu respon yang cepat dalam menentukan posisi namun mempunyai kelemahan pada akurasinya.
KESIMPULAN
1. Berhasil dikembangkan sistem informa si pengangkutan zat radioaktif berbasis
google maps menggunakan bahasa
pemrograman PHP, MySQL database, dengan kemampuan menampilkan titik-titik koordinat posisi pengangkut zat radioaktif beserta paparan radiasi nya pada peta virtual berbasis Google Maps.
2. Berhasil dikembangkan sistem oto matisasi penerimaan dan penyimpanan data yang dikirimkan dari In Vehicle
Module Radioactive Monitoring
3. Waktu yang dibutuhkan dari proses pengambilan data oleh GPS Receiver
sampai dengan sms diproses kedalam
database adalah 8 detik dengan
kondisi jaringan selular pada saat off peak. Dengan refresh time pada peta selama 2 menit, dapat disimpulkan bahwa sistem ini bersifat realtime.
UCAPAN TERIMAKASIH
Diucapkan terima kasih kepada Bapak Adi Abimanyu , S.ST yang telah memberikan kesempatan untuk melakukan kegiatan pengembangan sistem informasi pemantau pengangkutan zat radioaktif berbasis google maps, Bpk. Ir. Djiwo Harsono, M.Eng, yang telah memberikan bimbingan untuk melakukan pengembangan sistem informasi pemantau pengangkutan zat radioaktif berbasis google maps.
DAFTAR PUSTAKA
[1] PURWANTORO, 2013, Sistem Informasi Pemantau Pengangkutan Zat
Radioaktif Berbasis Google Maps,
Tugas Akhir pada Jurusan Teknofisika Nuklir, Sekolah Tinggi Teknologi Nuklir – BATAN, Yogyakarta.
[2] ABIMANYU, A., PRAJITNO, JU MARI & SETIAWAN, J. B. 2010.
Pembuatan Perangkat Lunak Penampil, Penyimpan dan Pengiriman Data GPS Survey Meter Dengan PC Melalui Port USB. Pada : Prosiding Seminar Nasio nal VI SDM Teknologi Nuklir, 18 November 2010, STTN-BATAN, Yog yakarta
[3] ABIDIN, H. Z. 2007. Penentuan Posisi
dengan GPS dan Aplikasinya, PT
Pradnya Paramita, Jakarta.
[4] ANONIM. 2013. PHP Manual
[Online].http://www.php.net/manual/en /preface.php Diakses pada 7 Februari 2013.
[5] NOVERGUST, D., PRAMADI HANTO, D. & TAUFIQURRAHMAN. 2012. Sistem Online Untuk Kemanan Dan Pelacakan Kendaraan Mengguna
kan GPS Tracker Dan Google Map. S1,