BAB II
TINJAUAN PUSTAKA
2.1 Baja
Material baja merupakan material yang dikenal unggul dibandingkan beton.Baja merupakan material campuran logam (alloy) yang terbentuk oleh besi (Fe) yang mangandung karbon dan unsur lainnya seperti mangan, kromium, vanadium dan tungsten. Komposisi campuran tersebut akan menghasilkan mutu yang berbeda-beda. Penggunaan karbon dalam pembuatan material baja adalah untuk meningkatkan kekuatan (strength).Namun dengan meningkatnya kekuatan (strength) maka daktilitas cenderung menurun.Untuk itu perlu kontribusi komponen kimia lainnya dalam menyeimbangkan antara kekuatan dan daktilitas.
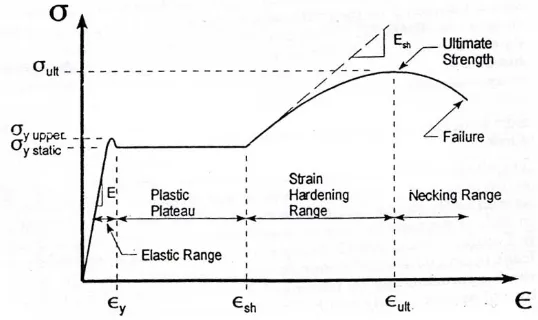
Dalam merencanakan suatu struktur perlu dipahami karakteristik material yang akan digunakan. Untuk itu perlu dipahami mengenai material properti, material properti berisi informasi kekuatan dan daktilitas dari suatu material, yang nantinya digunakan dalam pertimbangan pemilihan material.Hubungan antara tegangan dan regangan digunakan dalam melihat tingkat daktilitas suatu material.Semakin panjang kurva yang dihasilkan maka semakin tinggi pula tingkat kedaktilan material tersebut.
Dari kurva di atas dapat lihat hubungan tegangan-regangan baja terbagi menjadi 4 zona yaitu zona elastik, zona plastis, zona strain hardening, zona terjadinya necking dandi akhiri dengan keruntuhan (failure). Keempat zona tersebut dapat dijelaskan sebagai berikut:
• Zona elastis, pada zona ini terlihat tegangan dan regangan bertambah membentuk garis linear. Kemiringan linear pada zona elastik ini disebut dengan modulus young (E) atau lebih dikenal sebagai modulus elastisitas. Kondisi material pada zona ini adalah linear elastik artinya pembebanan pada daerah ini menyebabkan material dapat kembali ke bentuk semula. Akhir dari zona ini ialah ketika tercapainya kelelehan material (fy).
• Zona plastis, setelah awal kelelehan terjadi maka material akan masuk pada zona berbentuk garis datar (flat plateau), pada zona ini hanya ada peningkatan regangan. Kondisi material pada zona ini tidak lagi elastik tetapi sudah plastis artinya material yang berdeformasi tidak dapat kembali ke bentuk awal.
• Zona strain hardening, zona ini ditandai dengan meningkatnya tegangan dan regangan namun hubungan yang terjadi tidak lagi linear tetapi sudah non linear.
• Zona necking, zona ini tercapai saat tegangan mencapai kelelehan ultimit (fu) yang secara berlahan-lahan turun hingga material mencapai titik keruntuhan (failure).
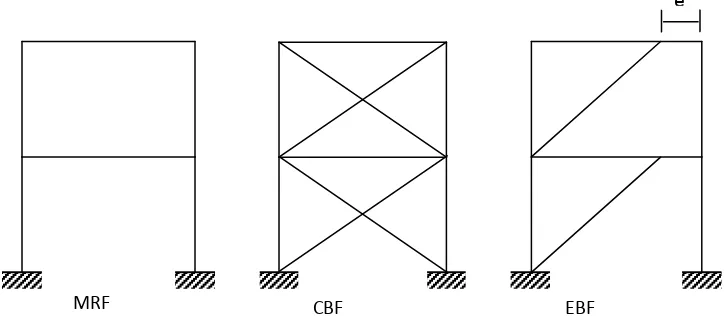
Gambar 2.2 Tiga tipe rangka baja penahan gempa (Yurisman. 2010)
e
MRF CBF EBF
2.2 Sistem Rangka Baja
Secara umum sistem bangunan rangka baja atas tiga tipe yaitu: (1) Moment Resisting Frame (MRF) ataurangka penahan momen, (2) Concentrically BracedFrame (CBF) atau rangka berpengaku konsentrik dan (3) Eccentrically Braced Frame (EBF) atau rangka berpengaku eksentrik yang dapat dilihat pada Gambar 2.2.
Moment Resisting Frame (MRF) ataurangka penahan momen adalah sistem rangka yang umum digunakan, tipe ini mempunyai kemampuan dissipasi energi yang sangat baik.Penyerapan energi gempa dilakukan dengan terjadinya kelelehan pada balok dan kolom serta panel zone yang berada di dekat joint sehingga terbentuknya sendi plastis.
Eccentrically Braced Frame (EBF) atau rangka berpengaku eksentrik merupakan penggabungan dari kedua rangka di atas. Sehingga mengahasilkan tingkat kekakuan dan daktilitas sama baik. Kelelehan tipe ini terjadi dengan terbentuknya plastifikasi elemen link tanpa memperbolehkan elemen lain mengalami kelelehan atau masih dalam kondisi elastik. Elemen link ialah elemen yang sengaja dilemahkan untuk menyerap energi gempa yang merupakan bagian dari balok. Elemen link juga dapat diibaratkan sebagai sekering, sehingga jika terjadi beban gempa yang berlebihan, elemen link akan memutuskannya dengan proses plastifikasi.
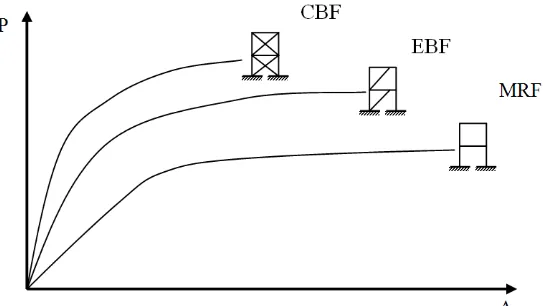
Dari penelitian-penelitian yang telah dilakukan maka dapat disimpulkan bahwa Sistem rangka berpengaku eksentrik atau EBF lebih unggul dibandingkan dengan sistem rangka pengaku momen dan system rangka berpengaku konsentrik. Hal ini dapat dinyatakan pada Gambar 2.3 berikut:
2.3 Sistem Rangka Berpengaku Eksentrik
Sistem rangka berpengaku eksentrik atau yang dikenal dengan Eccentrically Braced Frame (EBF) diperkenalkan pertama sekali pada tahun 1970-an, yang kemudian dikembangkan lebih lanjut oleh Popov.Struktur EBF memiliki keunggulan sebagai mana telah dipaparkan di atas, di mana tipe ini merupakan penggabungan
e
antara Concentrically BracedFrame (CBF) atau rangka berpengaku konsentrik dengan Moment Resisting Frame (MRF) ataurangka penahan momen.Kemampuan penyerapan energi pada struktur ini terletak pada adanya elemen pada balok yang disebut link yang menyebabkan tingginya daktalitas sistem EBF. Dissipasi energi atau penyerapan energi gempa terjadi dengan proses plastifikasi atau perlelehan pada profil link.
Dengan konsep EBF yang mengalihkan penyerapan energi kepada elemen link, diharapkan elemen-elemen lain di luar link masih dalam kondisi elastik sehingga struktur masih dapat bertahan agar proses evakuasi pada kejadian gempa dapat terlaksana. Sistem rangka berpengaku eksentrik memiliki beberapa tipe berdasarkan konfigurasi dari pengaku (bracing) yaitu 1 (Split K-Braced 2) (V-Braced dan 3) D-Braced seperti yang dapat dilihat pada Gambar 2.4.
Akibat pembeban lateral (beban gempa) yang bekerja pada EBF element link mengalami deformasi yang membentuk sudut inelastik. Untuk setiap tipe EBF bentuk dari deformasi strukturnya berbeda-beda.Seperti yang tercantum pada Gambar 2.5.
Dari Gambar 2.5 dapat dilihat bahwa besarnya sudut rotasi (γp
Gambar 2.4 Konfigurasi bracing pada sistem EBF
) Tipe K dan tipe D sama sehingga dapat diperhitungkan dengan rumus berikut:
𝛄𝛄𝛒𝛒 = 𝐋𝐋 𝐞𝐞𝛉𝛉𝛒𝛒
(2.1)
Untuk tipe V-Braced besarnya sudut rotasi (γp
γ
) dapat dihitung sebagai berikut:
p
dan besarnya sudut plastis (𝜃𝜃𝑝𝑝) dapat dihitung sebagai berikut:
=𝑳𝑳
𝟐𝟐𝟐𝟐𝜽𝜽𝒑𝒑 (2.2)
𝜽𝜽𝒑𝒑 = 𝜟𝜟𝒉𝒉𝒑𝒑 (2.3)
Di mana:
L = Lebar bentang (bay width)
e = Panjang Link (Link Length)
h = Tinggi lantai (story height)
𝛥𝛥𝑝𝑝 = Pergeseran plastis lantai (plastic story drift).
2.4 Elemen Link
Elemen link ialah bagian dari balok pada sistem EBF yang direncanakan untuk mendisipasi energi ketika terjadi gempa kuat.Ukuran dari panjang link dapat mempengaruhi kekakuan lateral. Untuk ukuran link yang pendek akan menimbulkan efek kekakuan lateral yang besar. Dan semakin panjang ukuran link maka akan semakin kecil kekakuan yang dihasilkan dan perilakunya akan lebih fleksibel menyerupai sistem rangka penahan momen atau MRF.
Link geser atau link pendek adalah elemen link yang kelelehannya terjadi akibat gaya geser yang bekerja. Ciri-ciri keruntuhannya terjadi kerusakan pada daerah badan terlebih dahulu. Link lentur atau link panjang adalah elemen link yang kelelehannya terjadi akibat momen atau gaya lentur. Ciri-ciri keruntuhannya terjadi kerusakan pada daerah sayap.
Link pendek umumnya memiliki kinerja yang baik dibandingkan dengan link panjang. Namun rotasi inelastik yang disyaratkan cukup besar sehingga ada kemungkinan terjadi kerusakan pada elemen non struktural.Berbeda dengan link panjang yang memiliki sudut rotasi yang kecil sehingga elemen struktural masih dalam kondisi aman.Dari segi arsitektural link panjang memiliki keunggulan dibandingkan dengan link pendek karena bracing pada rangka tidak terlalu panjang.
2.4.1Beberapa Penelitian Tentang Link
Penelitian tentang link berawal dari penelitian tentang struktur rangka berpengaku eksentrik atau yang dikenal dengan Eccentrically Braced Frame (EBF). Pada tahun 1970-an oleh Popov dan Roeder melakukan penelitian dengan skala 1:3 dengan objek penelitian gedung 20 lantai. Penelitian tentang EBF mulai dikembangkan dengan penelitian oleh Engelhardt dan popov pada tahun 1989a, 1989b, 1992; Kasai dan Popov Pada tahun 1986a, 1986b, 1986c; Ricles dan Popov pada tahun 1987, Whittaker, Uang, dan Bertero pada tahun 1987.
Berdasarkan riset-riset yang ada (Kasai dan Popov 1986; Ricles dan popov 1987; Gobarah dan Ramadhan 1994) dievaluasi bahwa model link yang dikembangkan oleh Ricles dan Popov 1977 tidak dapat digunakan untuk semua aplikasi.
didesain dengan baik. Sehingga gaya aksial yang besar dapat diminimalisir. Link adalah elemen planar dengan tanpa ada derajat kebebasan. Berdasarkan eksperimen yang dilakukan oleh Kasai dan Popov (1986), pada saat link mengalami kelelehan dan strain hardening berlangsung maka pada saat itu tidak ada interaksi antara momen dan gaya geser. Dengan mengadopsi asumsi-asumsi ini didapatkan model yang akurat dalam mempresentasekan perilaku link geser.
Yurisman, dkk (2011) mempaparkan dalam penelitiannya mengenai link panjang dengan pengaku diagonal, dalam rangka meninggkatkan kinerja link. Di dalam penelitian yang menggunakan bantuan program komputer. Elemen link dimodelkan sebagai elemen Shell melalui pendekatan elemen hingga di mana tiap elemen terdiri dari empat node dan tiap node memiliki enam derajat kebebasan. Profil yang ditinjau adalah profil IWF dari hasil yang ditunjukkan terlihat ada peningkatan kinerja link sekitar 16 persen.
2.4.2Perencanaan Link
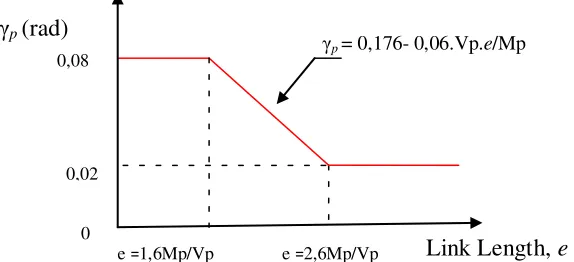
Berdasarkan penelitian Kasai dan Popov, 1986 yang telah tertuang di dalam AISC 2005, persamaan dalam menentukan panjang elemen link dan syarat rotasi inelastik dapat diambil sebagai berikut:
a. Link Pendek /link geser murni. e ≤ 1,6Mp/Vp, γp
Kelelehan pada link jenis ini diakibatkan oleh geser, sehingga terjadi kerusakan (fracture) pada badan.
= 0,08 radian
b. Link Panjang/Link lentur murni, e ≥ 2,6Mp/Vp, γp
Kelelehan pada link jenis ini diakibatkan oleh momen lentur, sehingga terjaditekukdan torsi lateral pada sayap.
= 0,02 radian
c. Link kombinasi geser dan lentur, 1,6Mp/Vp < e < 2,6Mp/Vp
Sudut rotasi inelastik (γp) diperoleh dengan melakukan interpolasi antara
Di mana:
= Momen plastis yang berkerja yang menyebabkan plastifikasi
x
F
= Modulus penampang plastis
y
V
= Tegangan leleh baja
p
A
= Gaya geser yang berkerja yang menyebabkan plastifikasi
w
d
= Luas penampang badan (web)
b
t
= Kedalaman profil balok (beam)
f
t
= Ketebalan sayap (flange)
w = Ketebalan badan (web)
Karena link berperilaku sebagai balok pendek yang pada kedua sisinya berkerja gaya geser dengan arah yang belawanan, maka pada kedua ujungnya akan
Gambar 2.6 Hubungan panjang link dengan sudut rotasi inelastik
bekerja gaya momen dengan arah yang sama (Yurisman, dkk. 2010) yang dapat dilihat pada Gambar 2.7.
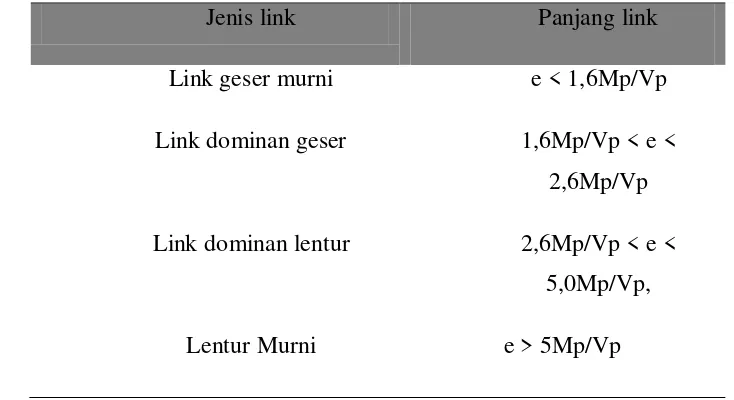
Dari Gambar 2.7 dapat terlihat kedua gaya tersebut yang mempengaruhi proses kelelehan (plastifikasi) pada elemen link. Seperti yang telah diurai diawal perilaku link akan sangat dipengaruhi oleh gaya yang bekerja. Yurisman dkk 2010 membagi link menjadi empat jenis antara lain dapat dilihat dalam Tabel 2.1. berikut:
Jenis link Panjang link
Link geser murni e < 1,6Mp/Vp
Link dominan geser 1,6Mp/Vp < e < 2,6Mp/Vp
Link dominan lentur 2,6Mp/Vp < e < 5,0Mp/Vp,
Lentur Murni e > 5Mp/Vp Tabel 2.1 Kategori link berdasarkan strength ratio (Yurisman, dkk 2010)
V
M
M
V
Ketentuan-ketentuan perencanaan elemen link berdasarkan AISC, 2005 adalah sebagai berikut:
a. Perbandingan antara lebar dan ketebalan profil harus mengacu pada table I-8-1 AISC. Seismic Provision 2005 tentang pembatasan rasio lebar dan tebal untuk elemen tertekan.
b. Berdasarkan riset yang dilakukan tentang localbuckling pada link oleh Okazaki, Arce, Ryu, dan Engelhardt, 2004 dan Richard, Uang, Okazaki, Engelhardt, 2004. Rasio lebar dan tebal sayap pada link untuk panjang 1,6
Mp/Vp
c. Kuat geser nominal (Vn) dari elemen link harus lebih kecil dari kuat geser plastis (Vp) sebagai berikut:
atau kurang dapat diperlonggar dari 0.30�𝐸𝐸/𝐹𝐹𝑦𝑦menjadi
0.38�𝐸𝐸/𝐹𝐹𝑦𝑦. Batasan baru ini sesuai dengan table B4.1 di dalam peraturan
AISC Seismic Provision 2005.
• Untuk e ≤ 2,6Mp/Vp maka nilai untuk Vn = Vp
• Untuk e >2,6Mp/Vp maka nilai untuk Vn = 2Mp/e
Di mana nilai Mp dan nilai Vp diperoleh dari persamaan 2.4 dan 2.5.
d. Sesuai ketentuan LRFD, maka kekuatan geser nominal (Vn) harus lebih besar dari atau sama kuatnya dengan kuat geser Ultimit (Vu) di mana kuat geser nominal harus dikalikan dengan suatu faktor reduksi (øv
Sehingga kita dapatkan formulasi:
):
Vu ≤ øv .Vn (2.7)
Di mana:
Vu = Kuat geser ultimit øv
e. Efek dari gaya axial pada link diabaikan apabila gaya axial yang diijinkan tidak lebih besar 15 persen dari kekuatan leleh nominal pada link atau dapat dibentuk persamaan berikut:
Pu ≤ 0.15 . Py (2.8)
Py = Fy.Ag (2.9)
Dimana:
Pu = Gaya aksial yang dijinkan Py = Gaya aksial nominal Fy = Kuat leleh baja Ag = Luas penampang
2.5 Pengaku Link (Link Sttiffner)
Pengaku pada elemen link dapat digunakan untuk meningkatkan daktalitas elemen link, dengan memasangkan pengaku pada badan maka akan memperlambat kejadian tekuk dan geser pada badan. Kejadian yang sering terjadi pada link pendek ialah terjadinya sobekan pada badan setelah terjadi tekuk (Kasai dan Popov 1986a). Berdasarkan penelitian itu maka Kasai dan Popov 1986 mengembangkan formulasi jarak pengaku sebagai berikut:
a = 29tw – d/5 untuk γp
a = Jarak antara pengaku (stiffner) tw
γ
= Tebal badan
p
Untuk memperjelas penjelasan di atas dapat dilihat contoh link stiffner pada EBF tipe Spit K-Braced Gambar 2.8,
Percobaan yang telah dilakukan Engelhardt dan Popov mendapatkan pemasangan pengaku pada link kombinasi (antara link pendek dan link panjang) tidak sepenuhnya dapat memperlambat tekuk pada sayap, namun demikian tekuk pada sayap tidak seserius tekuk pada badan. Meskipun kekuatan link akan menurun dengan meningkatnya sudut rotasi inelastik.
Untuk link yang berperilaku sebagai link panjang (lentur), pengaku badan bagian tengah berfungsi untuk membatasi penurunan kekuatan yang disebabkan tekuk lokal pelat sayap dan tekuk lateral buckling (Yurisman, 2011). Pada penelitan terdahulu, Hjelmstad dan Popov (1983) melakukan percobaan dengan link panjang dan menemukan bahwa adanya kebutuhan pengaku di luar link yaitu pada hubungan link dan bracing. Kebutuhan pengakuan ini didasari beberapa faktor termasuk panjang link, rasio perbandingan tebal dan lebar sayap, dan juga termasuk sudut antara bracing dan balok. Engelhardt dan Popov (1992) menyarankan solusi konservatif dengan memasangkan pengaku dengan kedalaman sebagian di seberang dari ujung link pada jarak 1,5 b
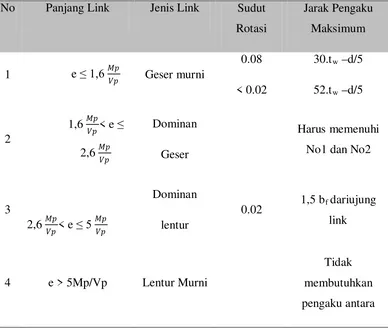
AISC 2005 Seismic Provisions for Structural Steel Building menetapkan ketentuan pengaku lateral elemen link sebagaimana yang dapat dilihat pada Tabel 2.2. Pada tabel tersebut mengklasifikasikan link pada empat jenis berdasarkan
gaya-f.
gaya yang berkerja pada elemen link tersebut, tabel ini membagi link kombinasi menjadi dua yaitu dominan geser dan dominan lentur, tergantung dari gaya dominan yang bekerja jika pada link kombinasi dominan lentur yang berkerja maka link disebut link kombinasi dominan lentur jika sebaliknya gaya geser yang mendominasi pada elemen link maka link disebut link kombinasi dominan geser. Tentunya pola atau kontur tegangan akan berbeda antara link kombinasi dominan geser dengan link kombinasi dominan lentur. Jika pada link dominan lentur tegangan akan lebih banyak pada pada bagian sayap dan untuk dominan geser, tegangan akan lebih besar pada bagian badan. Hal ini tentunya akan menimbulkan sudut rotasi yang berbeda antara satu jenis elemen link dengan jenis lainnya sebagaimana pada tabel.
No Panjang Link Jenis Link Sudut
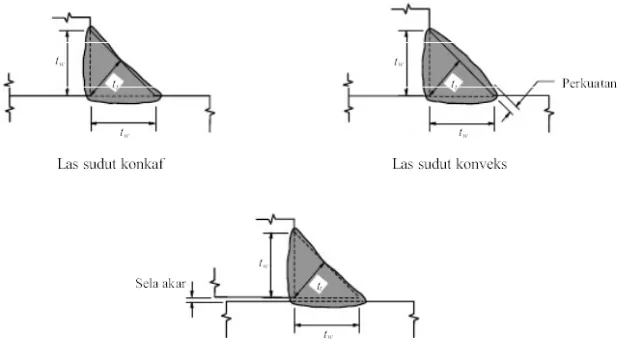
2.6 Las
Dalam konstruksi baja tentunya akan dijumpai sambungan, apakah untuk menambah bentang ataupun menambah elemen-elemen pada struktur baja tersebut. Sambungan terdiri komponen sambungan dan alat pengencang, komponen sambungan sendiri terdiri dari pelat pengisi, pelat buhul, pelat pendukung dan pelat penyambung.Sedangkan untuk alat pengencang dapat dibagi menjadi dua yaitu menggunakan baut atau las. Pemilihan pengencangan didasarkan keperluan struktur yang diharapkan, jika pengencangan diharapkan menimbulkan friksi maka dapat digunakan baut namun jika sambungan tidak boleh menimbulkan friksi dan slip maka digunakan sambungan las. Jenis las berdasarkan SNI terbagi menjadi 4 jenis yaitu, las tumpul, las susun, las sudut dan las tersusun.
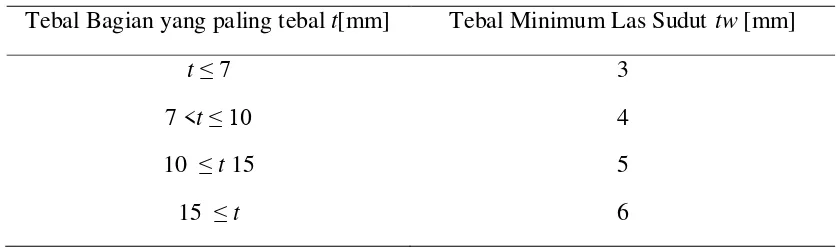
2.6.1 Ukuran Las
Dalam pengelasan perlu direncanakan tebal las tersebut karena akan mempengaruhi sifat dan karakteristik. Peraturan SNI 03 - 1729 – 2002 menetapkan tebal minimum las berdasarkan Tabel 2.3 berikut:
Tebal Bagian yang paling tebal t[mm] Tebal Minimum Las Sudut tw [mm]
t≤ 7 3
7 <t≤ 10 4
10 ≤ t 15 5
15 ≤ t 6
Dan untuk tebal maksimum las sudut sepanjang tepi, apabila komponen lebih kecil dari 6,4 mm maka tebal las maksimum diambil setebal komponen, namun apabila tebal komponen sama dengan atau lebih dari 6,4 mm maka diambil tebal las 1,6 mm kurang dari tebal komponen kecuali didesain untuk tujuan tertentu.
Panjang efektif las berdasarkan SNI 03 - 1729 – 2002 adalah seluruh panjang las sudut berukuran penuh dan tidak harus 4 kali ukuran las, jika kurang maka ukuran las untuk perencanaan harus dianggap 0,25 kali panjang efektif. Luas efektif dari las sudut adalah perkalian panjang efektif dan tebal rencana. Luas efektif ini yang menahan gaya pada sambungan dari keruntuhan.
2.6.2 Kuat Las Sudut
Dalam struktur baja perencanaan kekuatan suatu sambungan sangat penting untuk diperhatikan, hal ini dilakukan agar struktur baja yang direncanakan tidak terjadi kegagalan pada sambungan. Untuk las sudut kekuatan las harus dapat memenuhi persyaratan berikut:
𝑅𝑅𝑢𝑢 ≤ø𝑅𝑅𝑛𝑛𝑛𝑛 (2.13)
Dengan
Ø f𝑅𝑅𝑛𝑛𝑛𝑛 = 0,75tt(0,6 fuw
Ø
) (las) (2.14)
f𝑅𝑅𝑛𝑛𝑛𝑛 = 0,75tt(0,6 fu ) (bahan dasar) (2.15)
Dengan Ø f =
Di mana:
0,75faktor reduksi kekuatan saat fraktur
𝑅𝑅𝑢𝑢 = Beban terfaktor persatuan panjang
𝑅𝑅𝑛𝑛𝑛𝑛 = Tahanan nominal las persatuan panjang
fuw
f
= Tegangan tarik putus logam las, MPa
u = Tegangan tarik putus bahan dasar, Mpa
2.7 Metode Elemen Hingga
Metode elemen hingga digunakan untuk menyelesaikan permasalahan-permasalahan yang berkaitan dengan numerik.Ide berfikir dari Metode elemen hingga/Finite element method (FEM) ialah seperti membangun suatu objek yang besar dengan menggunakan elemen-elemen kecil dan sederhana.Metode elemen merupakan metode yang sangat aplikatif untuk berbagai kebutuhan, baik untuk perhitungan eksperimen, untuk perhitungan simulasi dan lain sebagainya.Keunggulan dari metode elemen hingga ialah dapat dibantu dengan komputer dalam penyelesaiannya karena metode elemen hingga (FEM) sangat aplikatif dengan bahasa komputer.
2.7.1 Analisis Nonlinear
sederhana melainkan persamaan nonlinear. Di dalam teori mekanika benda pejal (solid mechanics) disebutkan bahwa persamaan nonlinear berdasarkan tiga persamaan differensial berikut:
• Kondisi setimbang
𝜕𝜕𝜎𝜎𝑖𝑖𝑖𝑖
𝜕𝜕𝑥𝑥𝑖𝑖 +𝑏𝑏𝑖𝑖 = 0 (2.16)
Di mana 𝜎𝜎𝑖𝑖𝑖𝑖 adalah komponen tegangan tensor, 𝑏𝑏𝑖𝑖 adalah gaya badan dan
𝑥𝑥𝑖𝑖 adalah koordinat ruang.
• Hubungan konstutif ditunjukkan dengan hubungan tegangan-regangan.
𝜎𝜎𝑖𝑖𝑖𝑖 = 𝐷𝐷𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝜀𝜀𝑖𝑖𝑖𝑖 (2.17)
Di mana 𝜀𝜀𝑖𝑖𝑖𝑖 adalah komponen regangan tensor dan 𝐷𝐷𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖 adalah konstanta
elastik.
• Syarat kompabilitas dinyatakan dalam hubungan regangan-perpindahan.
𝜀𝜀𝑖𝑖𝑖𝑖 = ½ �𝜕𝜕𝑥𝑥𝜕𝜕𝑢𝑢𝑖𝑖𝑖𝑖+ 𝜕𝜕𝑢𝑢𝜕𝜕𝑥𝑥𝑖𝑖𝑖𝑖� (2.18)
Di mana 𝑢𝑢𝑖𝑖 adalah perpindahan.
Untuk melakukan analisa nonlinear pada program MSC/Nastran ada beberapa hal yang harus diketahui. Dalam menganalisa secara nonlinear pengaturan jumlah increment akan mempengaruhi hasil analisa, jumlah increment yang terlalu kecil akan mengahasilkan output yang sedikit namun jika jumlah increment terlalu besar maka waktu yang dibutuhkan akan lama dan tidak efisien, untuk itu penentuan jumlah increment perlu disesuaikan dengan kebutuhan analisa. Selanjutnya yang perlu diperhatikan jumlah iterasi, sama halnya dengan increment jumlah dari iterasi perlu diperhatikan untuk mendapatkan efesensi. Dan untuk solusi penyelesaiannya MSC/Nastran memberikan beberapa alternatif yaitu: Arc-Length Method, Full Newton Raphson, Modified Newton Method.
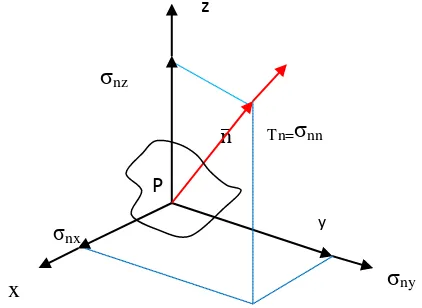
2.8 Tegangan-tegangan Utama
Pada suatu bidang ruang yang terdapat suatu tegangan resultan Tndi mana garis tegangan tersebut berimpitan dengan normal bidang sehingga tegangan geser,
σns tidak ada atau sama dengan nol. Arah yang dibentuk oleh Tn adalah arah utama sehingga bidang yang dibentuk juga merupakan bidang utama (principal plane). Tegangan normal yang bekerja pada bidang utama disebut dengan tegangan utama (principal stress), tegangan utama terdiri dari tiga bidang utama yang saling tegak
lurus yaitu σnx,σny, σnz, seperti dilihat pada Gambar 2.10.
n�
z
σnx
x
y
σny
P
σnz
Hubungan antara tegangan bidang dengan normal dapat dituliskan sebagai berikut:
atau persamaan di atas dapat dituliskan dalam notasi tensor sebagai berikut:
σni= σji. nj, i =1,2,3 (2.21)
dengan memproyeksikan σnnterhadapsetiapσnx,σny,σnz
σ
secara matriks persamaan diatas dapat ditulis sebagai berikut:
�
Sehingga dari persamaan di atas dengan melakukan determinasi maka di dapat:
Nilai akar-akar pangkat tiga dari persamaan (2.24) merupakan nilai dari tegangan utama. Dengan mengisikan nilai keenam komponen tegangan kartesian ke dalam persamaan maka akan diperoleh tiga nilai akar persamaan:
a. Bila (σnn)R1, (σnn)R2 dan (σnn)R3 merupakan bilangan real maka n�R1, n�R2 dan
n�R3
b. Bila (σnn)R1
merupakan bilangan unik dan saling tegak lurus. = (σnn)R2 ≠ (σ
nn)R3 makategangan merupakan tegangan
hidrostatis dan setiap arah adalah arah utama.
Hubungan tegangan invariant dengan tegangan principal dapat dituliskan sebagai berikut:
merupakan tegangan invariant pertama, kedua dan ketiga, dengan menyamakan sistem koordinat ke dalam arah-arah utama maka, tegangan invariant dapat dituliskan ke dalam persamaan berikut:
2.9 Regangan
Regangan merupakan nilai yang digunakan untuk menghitung intensitas deformasi, sama halnya dengan tegangan, regangan juga digunakan untuk menentukan gaya dalam. Regangan umumnya dapat dibagi menjadi dua yaitu regangan normal dan regangan geser. Regangan normal dilambangkan dengan
epsilon, ε, regangan normal digunakan untuk menghitung perubahan ukuran seperti
perpanjangan pada saat terjadinya deformasi, sedangkan regangan geser
dilambangkan dengan gamma γ, regangan geser ini digunakan untuk menghitung
perubahan bentuk seperti perubahan sudut yang diakibatkan geser pada bagian badan selama perubahan bentuk terjadi. Regangan atau deformasi dapat dihasilkan oleh tegangan, perubahan temperatur, atau perubahan fisik yang menyebabkan penyusutan atau pengembangan.Regangan pada umumnya tidak memiliki satuan, untuk regangan normal regangan dinyatakan dalam mm/mm, inch/inch, micro-inch/inch (μ in/in),
sedangkan untuk regangan geser dinyatakan dalam microradian, μ di mana micro
merupakan 10-6
Dalam eksperimen-eksperimen yang dilakukan, umumnya akan lebih mudah melakukan pembatasan terhadap regangan dibandingkan dengan melakukan pembatasan terhadap tegangan. Dengan mendapatkan nilai dari suatu regangan, maka nilai suatu tegangan bias didapatkan melalui hubungan tegangan dan regangan. Alat untuk mengukur regangan pada kegiatan eksperimen adalah strain gauge.Strain gauge merupakan lembaran tipis yang dipasangkan benda pengujian untuk mendapatkan nilai regangan pada titik-titik tertentu.Sesuai dengan jenis dari regangan maka jenis dari strain gauge umumnya ada dua jenis yaitu strain gauge single dan strain gauge rosette. Untuk strain gauge tipesingle nilai keluaran dapat diolah langsung, namun karena hasil keluaran dinyatakan dalam μ, maka nilai tersebut terlebih dahulu dikalikan dengan 10
.
-6
geser berbeda dengan tipe single yang dapat langsung dikalikan dengan10-6, namun harus dihitung dengan turunan rumus dari Gambar 2.11.
Dengan mengaplikasikan hukum kosinus ke dalam segitiga OC’B’ maka diperoleh:
(OB’)2 = (OC’)2 + (C’B’)2
Atau dalam hubungan regangan:
- (OC’) (C’B’) cos (П
2 + 𝛾𝛾𝑥𝑥𝑦𝑦) (2.27)
[(1+εn)dn]2= [(1+εX)dX]2 +[(1+εy)dy]2 – 2[(1+1+εX)dX] [(1+εy
Dengan mengganti nilai dn = dn.cos θ dan dy = dn. Sin θ maka:
)dy][-sin𝛾𝛾𝑥𝑥𝑦𝑦](2.28)
[(1+εn)dn]2 = (1+εX)2(dn)2(cos2θ)+(1+εy)2(dn)2(sin2θ)+2(dn)2(sinθ) (cos2θ)
(1+εX) (1+εy
Karena nilai dari regangan, ε kecil maka nilai dari kuadrat regangan dapat diabaikan.
)( sin𝛾𝛾𝑥𝑥𝑦𝑦) (2.29)
1+2.εn= (1+2.εx) . cos2θ+ (1+2.εy) . sin2
Dengan melakukan penyederhanaan pada persamaan di atas maka diperoleh:
θ + 2𝛾𝛾𝑥𝑥𝑦𝑦sin θ. Cos θ (2.30)
εn= εn cos2θ + εn sin2θ + 𝛾𝛾𝑥𝑥𝑦𝑦sinθ.Cos.θ
𝛾𝛾𝑥𝑥𝑦𝑦 = 𝜀𝜀𝑛𝑛−𝜀𝜀𝑛𝑛𝑐𝑐𝑐𝑐𝑐𝑐2𝜃𝜃−𝜀𝜀𝑛𝑛𝑐𝑐𝑖𝑖𝑛𝑛2𝜃𝜃
(2.31)
(2.32)
Gambar 2.11 Deformasi elemen dengan regangan
2.10 Hubungan Tegangan-Regangan
Hubungan tegangan-regangan akan mudah digambarkan ketika dalam kondisi plastis, namun ketika material dalam kondisi plastis maupun elastis-plastis hubungan antara tegangan dan regangan akan sulit digambarkan karena sudah tidak linear lagi. Pada Gambar 2.12 dapat dilihat kenaikan tegangan dan regangan material.
Dari gambar di atas dapat dilihat bahwa regangan dε tersusun atas dua bagian
yaitu, dεedan dεp, dimana dεe adalah kenaikan regangan elastis sedangkan dεp
merupakan kenaikan regangan plastis. Hubungan kenaikan tersebut dapat dituliskan secara umum sebagai berikut:
dε = dεe+ dεp (2.33)
dσ = Et. dε = E. dεe=Ep..dεp (2.34)
dσ = Kenaikan Tegangan yang bersesuaian,
E = Modulus Young,
Et = Modulus Tangensial, Ep= Modulus Plastis.
Hubungan antara Modulus Young (E), Modulus tangensial (Et) dan Modulus plastis (Ep) dapat dituliskan sebagai berikut:
1 Dalam menganalisis hubungan tegangan-regangan dalam kondisi elastik-plastis dengan pembebanan monotonik, dapat dilakukan dengan beberapa model antara lain: Perfectly Plastic Model, Linearly Hardening Model,
Elastic-Exponential Hardening Model, Ramberg-Osgood Model.
2.10.1 Elastic – Perfectly Plastic Model
Model ini mengabaikan work hardening sehingga kondisi plastis akan di mulai pada saat tegangan mencapai tegangan leleh 𝜎𝜎𝑦𝑦0, persamaan untuk model ini
dapat dituliskan sebagai berikut.
𝜀𝜀= 𝜎𝜎
𝜀𝜀= 𝜎𝜎
E + 𝜆𝜆Untuk kondisi σ = 𝜎𝜎𝑦𝑦0 (2.40)
Di mana nilai 𝜆𝜆 adalah bernilai positif.
2.10.2 Elastic – Linearly Hardening Model
Model ini mengasumsikan modulus tangensial bersifat konstan dan hubungan tegangan-regangan di gambarkan dalam suatu garis lurus
𝜀𝜀= 𝜎𝜎
2.10.3 Elastic – Exponential Hardening Model
Dalam model ini hubungan tegangan-regangan dibagi menjadi 2 bagian, yaitu untuk kondisi elastis dan untuk kondisi elastis-plastis
σ = E.𝜀𝜀Untuk kondisi σ ≤ 𝜎𝜎𝑦𝑦0 (2.43)
σ = k𝜀𝜀𝑛𝑛 Untuk kondisi σ >𝜎𝜎
𝑦𝑦0 (2.44)
Di mana nilai k dan n merupakan konstanta ditentukan dari curve-fitting dari hasil eksperimen.
2.10.4 Ramberg - Osgood Model
Model ini menampilkan transisi hubungan tegangan-regangan dari kondisi elastis ke kondisi plastis. Persamaan tegangan-regangan untuk model ini adalah sebagai berikut:
2.11 Daktilitas
Daktilitas didefinisikan sebagai keamampuan suatu struktur untuk mengalami simpangan plastis secara berulang dan bolak-balik di atas titik leleh pertama (initial yield) dengan tetap mempertahankan sebagian besar keamampuan awalnya dalam memikul beban.Dalam perencanaan dalam bidang konstruksi kini daktilitas menjadi parameter yang sangat penting.Daktilitas pada awalnya hanya digunakan untuk menggambarkan karakteristik suatu material, namun dengan berkembangnya ilmu yang berkenaan dengan kegempaan dan plastisitas, maka daktilitas menjadi suatu hal yang penting dalam merecanakan bangunan yang tahan gempa.
Daktilitas merupakan suatu sifat yang berlawanan dengan sifat getas (brittle), sehingga dapat pula diartikan sebagai suatu sifat yang tidak runtuh secara tiba-tiba.Di dalam konsep plastisitas daktilitas diartikan sebagai kemampuan suatu struktur untuk berdeformasi setelah terjadi kelelehan awal (initial yield) akibat pembebanan gempa (siklik) tanpa mengalami reduksi kekuatan ultimit yang signifikan (Victor Gioncu dan Federico M Mazzolani, 2002).
Dari literatur - literatur yang berkembang daktilitas dapat diklasifikasikan menjadi lima jenis, yaitu:
• Daktilitas material atau daktilitas deformasi,
Merupakan daktilitas yang menggambarkan karakteristik deformasi material pada kondisi plastis untuk pembebanan yang berbeda.Daktilitas ini merupakan rasio antara regangan ultimit dengan regangan pada kondisi leleh pertama.
µm
Di mana:
= 𝜀𝜀𝑢𝑢
𝜀𝜀𝑦𝑦 (2.46)
µ = Daktilitas material
𝜀𝜀𝑢𝑢 = Regangan pada saat ultimit
• Daktilitas penampang atau daktilitas kurvatur
Merupakan perbandingan antara kurvatur ultimit dengan kurvatur pada leleh pertama.
µc
Di mana:
= ФФ𝑢𝑢
𝑦𝑦 (2.47)
µc
Ф𝑢𝑢 = Kurvatur pada saat ultimit = Daktilitas kurvatur
Ф𝑦𝑦 = Kurvatur pada saat leleh pertama
• Daktilitas elemen atau daktilitas rotasi
Daktilitas rotasi atau daktilitas elemen merupan rasio perbandingan antara rotasi pada kondisi ultimit dengan rotasi pada kondisi leleh pertama, atau dapat ditulis sebagai berikut:
µr = 𝜃𝜃𝜃𝜃𝑢𝑢
𝑦𝑦 (2.48)
Di mana: µr
𝜃𝜃𝑢𝑢 = Rotasi pada saat ultimit
= Daktilitas rotasi
𝜃𝜃𝑦𝑦 = Rotasi pada saat leleh pertama
• Daktilitas Struktur
ultimit dengan simpangan pada saat beban pada kelelehan pertama (initial yield) atau dapat ditulis sebagai berikut:
µs = 𝛿𝛿𝑢𝑢
𝛿𝛿𝑦𝑦 (2.49)
Di mana: µs
𝛿𝛿𝑢𝑢 = Simpangan pada saat ultimit
= Daktilitas struktur
𝛿𝛿𝑦𝑦 = Simpangan pada saat leleh pertama
• Daktilitas Energi
Daktilitas Energi merupakan rasio perbandingan antara dissipasi energi maksimum pada saat beban mencapai ultimit dengan dissipasi energi pada saat kelelehan pertama (initial yield) atau dapat ditulis sebagai berikut:
µe = 𝐸𝐸𝑢𝑢
𝐸𝐸𝑦𝑦 (2.50)
Di mana: µe
𝐸𝐸𝑢𝑢 = Energi pada saat ultimit
= Daktilitas energi
𝐸𝐸𝑦𝑦 = Energi pada saat leleh pertama
Tipe Daktilitas Skema Daktilitas Defenisi
Tabel 2.4 Tipe daktilitas(Victor Gioncu dan Federico M Mazzolani, 2002)
δ δ
F
δ
2.12 Energi Histeresis
Selain daktilitas hal lain yang terpenting untuk dianalisis ialah kemampuan struktur tersebut dalam melakukan penyerapan energi/dissipasi energi. Penyerapan energi ini terjadi ketika suatu elemen/struktur sudah melewati kondis elastik. Pada zona plastis, seiring dengan terjadinya plastifikasi pada elemen/struktur tersebut maka akan terjadi proses dissipasi energi.
Pada penelitian-penelitian yang berkaitan dengan kegempaan, dissipasi energi merupakan parameter yang harus dianalisis karena dengan mengetahui besarnya kemampuan struktur dalam mendissipasi energi. Energi ini diperlukan untuk perpanjangan dan perpendekan plastis dari material baja dan dapat dihitung sebagai hasil kali dari gaya plastis dan perpindahan plastis. Berbeda halnya dengan energi lain seperti enegi kinetik atau energi regangan yang dapat kembalikan, energi histeretik ini terdissipasi dan tidak dapat dikembalikan.
Dissipasi energi akibat pembeban gempa atau beban siklik digambarkan kedalam kurva hysteresis loop pada Gambar 2.13. Dari luasan kurva hysteresis loop ini lah maka kita akan dapat menentukan besar kemampuan struktur dalam hal mendissipasi energin. Energi histeretik dapat dituliskan sebagai berikut:
Eh = Py ( δmaks– δy Di mana E
) (2.51)
h merupakan energi dissipasi, δmaks dan δysecara berurut merupakan perpindahan pada kondisi ultimit dan perpindahan pada saat kelelehan pertama.
2.13 Redaman (Damping)
Energi yang ditimbulkan oleh gempa bumi tidak baik untuk bangunan, energi yang ditimbulkan oleh gempa bumi adalah berbentuk getaran. Getaran inilah yang nantinya akan merusak bangunan. Untuk mengurangi efek dari getaran maka getaran tersebut harus diminimalkan, atau dengan kata lain energi yang dihasilkan harus diminimalkan, fenomena disipasi energi ini disebut redaman (damping).
Redaman untuk struktur sebenarnya biasanya dinyatakan dengan equivalent
viscous damping yang disimbolkan dengan ζeq. Gambar 2.14 dapat dilihat kurva
hubungan antara gaya dan perpindahan di bawah kondisi pembebanan siklik, pada kegiatan eksperimen nilai dari u0 ditentukan.
Pada gambar tersebut juga dilihat besaran penyerapan energi sebesar luasan ED
4 π ζ
maka persamaan untuk viscous damping dapat dinyatakan sebagai berikut:
eq𝜔𝜔𝜔𝜔 0
ESo = ED (2.52)
Atau persamaan diatas dapat di ubah menjadi:
ζeq
dimana strain energy, E
= 1 4𝜋𝜋
1
𝜔𝜔 𝜔𝜔𝑛𝑛⁄
ED
E𝑐𝑐𝑐𝑐 (2.53)
So = 𝑖𝑖𝑢𝑢𝑐𝑐2⁄2
Namun jika meninjau pada saat respon yang dihasilkan terhadapa sistem struktur atau
pada saat ω = ωn
ζ
maka besaran viscous damping menjadi:
eq= 1 4𝜋𝜋
ED
E𝑐𝑐𝑐𝑐 (2.54)
2.14 Hardening Rule
Dalam memodelkan pengujian baja umumnya terdapat dua model yaitu, isotropic hardening model dan kinematic hardening model.Pada isotropic hardening model kurva hysteresis yang akan dihasilkan cenderung membesar dan terlalu gemuk namun efek Bauschinger tidak dapat diperhitungkan pada model ini. Pola hysteresis loop untuk isotropic hardening model dapat dilihat pada Gambar 2.15.
Efek Bauschinger adalah efek yang dihasilkan oleh karakteristik material akibat defomasi plastis sehingga menyebabkan adanya perubahan distribusi tegangan, di mana pada saat unloading tegangan akan berada pada titik nol namun ketika diberikan pembebanan kembali tegangan yang dihasilkan tidak kembali ketitik awal melainkan di bawah tegangan yang sebelumnya , hal ini dapat dilihat seperti pada Gambar 2.16.
Bauschinger effect hanya dapat dimodelkan oleh kinematic hardening model di mana kurva yang akan dihasilkan akan mengalami pergeseran atau translasi tanpa adanya pembesaran kearah sumbu x. Untuk memperjelas dapat dilihat Gambar 2.16. Kedua metode pemodelan di atas umumnya kurang mendekati dengan kurva hysteresis hasil ekseperimental. Untuk mendapati kurva hysteresis mendekati kondisi eksperimen maka dikembangkan metode combined hardening model, motode ini merupakan penggabungan antara isotropic hardening model dan kinematic hardening model di mana grafik yang dihasilkan akan menggemuk dan terjadi pergeseran.
Sehingga akan didapati kurva hysteresis yang mendekati hasil eksperimental. Pola hysteresis loop combined hardening model dapat dilihat pada Gambar 2.17.
Gambar 2.17 Pola hysteresis loop combined hardening model