Fakultas Ilmu Komputer
Universitas Brawijaya 2832
Rancang Bangun Sistem Ventilasi Vertikal Solar Adaptive pada Prototype
Gedung Bertingkat Berbasis Mikrokontroler
Yanuar Enfika Rafani1, Tibyani2, Rizal Maulana3
Program Studi Teknik Informatika, Fakultas Ilmu Komputer, Universitas Brawijaya Email: 1[email protected], 2[email protected], 3[email protected]
Abstrak
Cahaya matahari dengan intensitas yang berlebih dapat menimbulkan masalah yaitu kenaikan suhu yang mengakibatkan ketidak nyamanan di dalam bangunan. Maka dari itu dibutuhkan penahan sinar matahari agar dapat mereduksi atau mengurangi panas dan masuknya cahaya matahari ke dalam bangunan. Dengan menggunkan mikrontroler arduino mega 2560 dan tambahan sensor LDR serta DHT11 maka ventilasi vertikal sebagai shading device dapat membuka atau menutup tiga arah, mengikuti arah matahari tinggi rendahnya matahari dan suhu pada ruangan. Mikrokontroller Arduino Mega 2560 ditanamkan logika fuzzy sugeno sebagai pemberi keputusan output berdasarkan perhitungan fuzzy. Hasil proses pengujian menunjukkan berbagai kondisi ventilasi bergerak menutup cahaya yang masuk berdasarkan hasil masukan dari sensor LDR dan sensor DHT11, pada pengujian fuzzy juga didapatkan hasil yang akurat. Hal ini menunjukkan sistem berjalan dengan baik dalam menentukan gerak ventilasi berdasarkan sudut datangnya cahaya.
Kata kunci: ventilasi vertikal, shading device, DHT11, LDR, Fuzzy Sugeno
Abstract
Sunlight intensity of excess can causes problems apply temperature increase which resulted in inconvenience in the building. Therefore it takes a beam of sunlight in order to reduce or mitigate the heat and light from the Sun's entry into the building. By either using the arduino mega 2560 microcontroller and additional sensors LDR and DHT11 then vent can open or close a three-way, follow the direction of the Sun is high in the low sun and inside room temperature. Arduino Mega 2560 microcontroller implanted fuzzy sugeno logic as the output decision maker based on fuzzy calculation. The test results indicate various conditions the vent move the incoming light close based on the input from the sensors and sensors DHT11, LDR on fuzzy testing also obtained accurate results. This indicates the system is running properly in determining the motion of ventilation based from light angle.
Keywords: vertical vent, shading device, DHT11, LDR, Fuzzy Sugeno
1. PENDAHULUAN
Sinar matahari merupakan elemen dalam kehidupan manusia yang memberikan pencahayaan dan memiliki efek positif bagi kesehatan manusia. Tetapi, dalam dunia arsitektur cahaya matahari dengan intensitas yang berlebih dapat mengganggu kenyamanan dan menyebabkan silau (Karen Kensek, 2011). Di wilayah beriklim tropis seperti Indonesia intensitas matahari berlangsung sedang sampai tinggi, akan mengakibatkan besarnya panas yang diterima bangunan dan selanjutnya berdampak pada suhu di dalam bangunan. Masalah yang ditimbulkan yaitu kenaikan suhu yang
mengakibatkan ketidak nyamanan di dalam bangunan. Maka dari itu dibutuhkan penahan sinar matahari agar dapat mereduksi atau mengurangi panas dan masuknya cahaya matahari ke dalam bangunan yang disebut
bangunan dideteksi menggunakan sensor DHT11. Data yang diterima oleh sensor diproses oleh mikrokontroler dengan menggunakan logika fuzzy sugeno sebagai penentu output. Hal tersebut menjadi alasan penelitian ini dengan penggunaan sensor-sensor dan logika fuzzy
sugeno sebagai pengambil keputusan agar lebih akurat. Pada penelitian ini motor servo digunakan output untuk menentukan sudut gerak ventilasi berdasarkan data dari tiga sensor LDR dan sensor DHT.
2. PERANCANGAN DAN
IMPLEMENTASI
2.1 Perancangan Sistem
2.1.1 Perancangan Blok Diagram dan Rangkaian Sistem
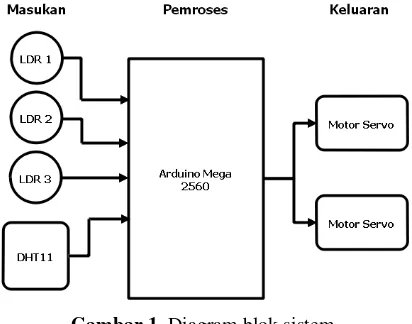
Sistem ini menggunakan empat buah sensor LDR dan satu buah sensor DHT11 sebagai masukkan data yang akan diproses oleh mikrokontroler Arduino Mega 2560. Hasil data input akan diproses dengan metode pengambil keputusan yaitu logika fuzzy. Keluaran dari sistem ini yaitu hasil dari proses logika fuzzy
sebagai pengambil keputusan berupa gerak ventilasi mengikuti arah matahari yaitu motor servo yang akan bergerak pada dua sumbu.
Gambar 1. Diagram blok sistem
Gambar 2. Diagram rangkaian sistem
2.1.2 Perancangan Motor Servo
Sistem ini menggunakan dua motor servo sebagai keluaran untuk menggerakkan ventilasi. Kedua motor servo tersebut berfungsi untuk menggerakkan dua sumbu yaitu vertikal dan horizontal, kelebihan dari penggunaan dua servo yaitu pergerakan ventilasi lebih presisi untuk mengikuti arah matahari. Servo pertama adalah servo horizontal bergerak ke arah barat dan setelah menerima masukan sinyal dari sensor LDR 1 dan LDR 2 dan diproses dengan mikrokontroler, sedangkan servo kedua adalah servo vertikal bergerak ke arah utara dan selatan hasil dari masukan sinyal sensor LDR 3.
2.1.3 Perancangan Letak Sensor
Gambar 3. Peletakan sensor pada gedung
Peletakan sensor LDR berpengaruh pada nilai dari intensitas cahaya matahari yang diterima oleh sensor. Jika sensor LDR diletakkan secara berdekatan tanpa ada pembatas maka sensor tersebut tidak dapat terfokus untuk melakukan sensing pada arah yang telah ditentukan dan akan membaca nilai intensitas cahaya matahari hampir sama pada setiap sensor.
2.2 Perancangan Perangkat Lunak
2.2.1 Perancangan Alur Kerja Sistem
Perancangan alur kerja sistem ini menjelaskan mengenai cara kerja sistem dari awal program yang dibuat dimulai hingga program selesai. Diagram alir sistem pada gambar 4 menjelaskan sistem dimulai dengan melakukan pembacaan pada sensor LDR1, LDR2, LDR3 untuk mencari nilai intensitas cahaya matahari kemudian sensor DHT11 mendeteksi suhu. Proses selanjutnya yaitu sistem akan melakukan fuzzifikasi yang kemudian dilanjutkan dengan inferensi fuzzy. Pada tahap inferensi fuzzy sistem akan membandingkan nilai hasil sensing sensor LDR dan nilai hasil sensing sensor DHT11 dari tahap fuzzifikasi yang akan menjadi nilai penalaran
fuzzy. Nilai penalaran fuzzy digunakan sebagai output untuk menggerakan motor servo ke arah cahaya matahari dengan intensitas paling tinggi, tetapi diperlukan proses defuzzifikasi karena motor servo hanya dapat membaca nilai yang tegas agar dapat bergerak sesuai dengan perancangan yang telah ditentukan. Gerak motor servo juga dipengaruhi oleh nilai suhu di dalam gedung.
Gambar 4. Diagram alir sistem
2.2.2 Perancangan Fuzzy
Fuzzifikasi merupakan proses mengubah nilai data masukan dari nilai pasti ke dalam fuzzy
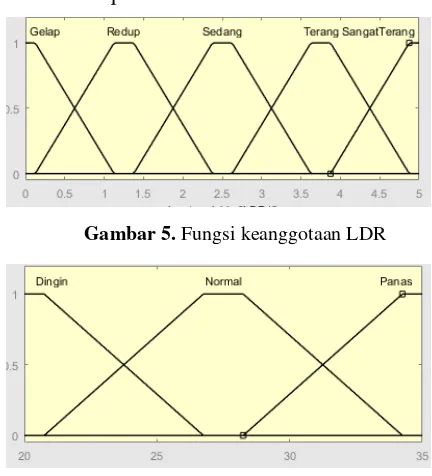
input. Grafik himpunan keanggotaan memiliki lima himpunan fuzzy yang merupakan tegangan output (Vout) sensor LDR. Nilai dari tegangan output tersebut akan berubah naik atau turun berdasarkan nilai intensitas cahaya yang diterima, direpresentasikan menggunakan kurva trapesium dimana himpunan anggota pada variabel LDR yaitu gelap, redup, sedang, terang dan sangat terang. Sedangkan pada variabel Suhu memiliki himpunan keanggotaan dingin, normal dan panas.
Gambar 5. Fungsi keanggotaan LDR
keanggotaan yaitu dingin, normal dan panas degan rentang suhu antara 20°C-35°C.
Metode inferensi fuzzy Sugeno merepresentasikan aturan-aturan yang telah dibuat berdasarkan data pada setiap variabel dalam himpunan fuzzy. Pada sistem ini terdapat variabel LDR dengan lima himpunan keanggotaan fuzzy yaitu gelap, redup, sedang, terang dan sangat terang dan variabel suhu dengan tiga himpunan keanggotaan dingin,
normal, panas. Penentuan aturan dasar “IF”, “AND”, “THEN” berdasarkan pengujian manual
dengan memperhitungkan kemungkinan yang dapat terjadi dengan kombinasi kedua variabel. Aturan perhitungan logika fuzzy berdasarkan penentuan aturan yang ditentukan oleh metode
fuzzy Sugeno.
Fungsi keanggotaan defuzzifikasi dengan menggunakan aturan singleton, karena hasil representasinya lebih sederhana yaitu nilai-nilai tunggal. Proses defuzzifikasi adalah proses pemetaan dari himpunan fuzzy ke himpunan tegas yang dilakukan untuk menentukan posisi sudut motor servo. Gerak dari motor servo berdasarkan proses rule evaluation yang kemudian dikonversikan dalam bentuk gerak sudut servo untuk menentukan posisi ventilasi.
Tabel 1. Posisi Ventilasi Berdasarkan Sudut Servo 1
Tabel 2. Posisi Ventilasi Berdasarkan Sudut Servo 2
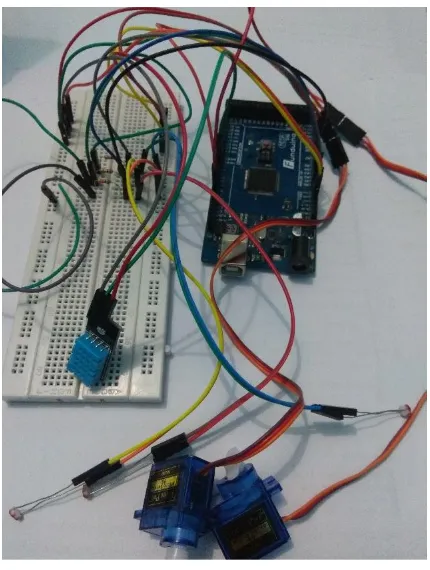
bekerja sesuai fungsi dan tujuan. Implementasi perangkat keras pada sistem ini sendiri terdiri dari rangkaian mekanik motor servo dan peletakan sesnsor pada prototype gedung bertingkat seperti pada Gambar 7 dan implementasi pada prototype pada Gambar 8.
Gambar 8. Prototype Gedung Bertingkat
2.3.2 Implementasi Perangkat Lunak
Tahap implementasi perangkat lunak merupakan tahap pembuatan program pada sistem agar bekerja sesuai dengan tujuan dan perancangan dengan menggunakan bahasa pemrograman C pada mikrokontroler arduino. Mulai tahap pembacaan sensor, perhitungan
fuzzy dan gerak output.
3. PENGUJIAN DAN ANALISIS
Pengujian dilakukan untuk mengetahui apakah semua kebutuhan yang diharapkan telah terpenuhi oleh sistem.
3.1 Pengujian Akuisisi Data Sensor LDR
Pengujian hasil pembacaan sensor Light Dependent Resistor dilakukan untuk mengetahui kemampuan sensor dalam membaca intensitas cahaya dari rentang terendah sampai tertinggi. Keluaran dari sensor LDR telah dikalibarasi dalam bentuk tegangan (V). Pengujian ini dilakukan dengan cara meletakkan sensor LDR pada tiga arah mata angin yaitu sensor LDR1 pada barat gedung, LDR2 pada bagian timur gedung dan LDR3 berada pada utara gedung. Berikut adalah Gambar 7 yang merupakan hasil dari pembacaan sensor LDR.
Gambar 9. Pengujian sensor LDR
Dari hasil pengujian pembacaan sensor didapatkan nilai sensor LDR terendah dengan nilai 0.89 pada pukul 07:00 dan tertinggi dengan nilai 3.11 pada pukul 13.00. Hasil pembacaan sensor terendah didapatkan karena intensitas matahari sangat rendah atau redup pada pagi hari dan hasil pembacaan sensor tertinggi didapatkan pada siang hari karena matahari tepat berada diatas dengan nilai intensitas yang lebih tinggi dibandingkan dengan pagi hari.
3.2 Pengujian Akuisisi Data Sensor DHT11
Pengujian pada sensor DHT11 memiliki tujuan untuk mengetahui error dari sensor. Nilai suhu yang dibaca oleh sensor kemudian dibandingkan dengan hasil deteksi termometer ruangan. Berikut adalah Gambar 8 yang merupakan hasil dari pembacaan sensor DHT11 yang dibandingkan dengan hasil dari pembacaan termometer setelah melalui prosedur.
Gambar 10. Pengujian sensor DHT11
17.00 dengan mengambil 21 sampel data pada setiap 30 menit pengambilan data. Hasil pembacaan sensor LDR 1 dan LDR 2 timur barat pada Servo 1 dan LDR 3 untuk utara pada Servo 2 direpesentasikan dalam grafik Gambar 9 dan Gambar 10. Gerak pada servo telah sesuai dengan rule yang dibuat pada perancangan.
Gambar 11. Perubahan Sudut Servo1
Gambar 12. Perubahan Sudut Servo2
3.4 Pengujian Fuzzy
Pada pengujian fuzzy ini memiliki tujuan untuk membuktikan bahwa sistem dikatakan bekerja dengan benar apabila hasil nilai dari perhitungan pada sistem sama dengan nilai perhitungan secara manual. Berikut adalah hasil pengujian perhitungan fuzzy pada Tabel 2 dan Tabel 3 merupakan hasil perhitungan sistem yang dapat dilihat pada serial monitor di Arduino IDE.
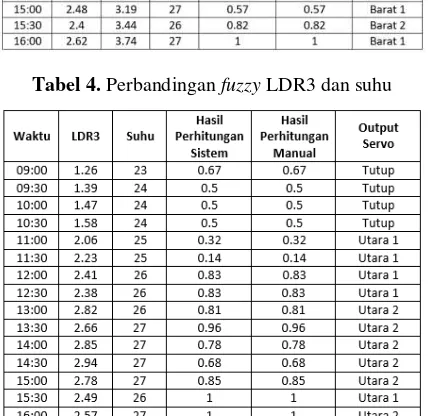
Tabel 4. Perbandingan fuzzy LDR3 dan suhu
Berdasarkan hasil pengujian Fuzzy dengan menggunakan 15 sampel data dapat disimpulkan bahwa sistem ini bekerja sesuai dengan tujuan dan perancangan yang sebelumnya telah dibuat. Hal ini dapat dibuktikan dengan cara membandingkan nilai dari hasil perhitungan oleh sistem dengan nilai dari hasil perhitungan manual dan hasilnya sama. Hasil dari pengujian ini berdasarkan pengujian secara langsung dan
real time bergantung pada cuaca saat melakukan pengujian. Oleh sebab itu hasil pengujian tidak menunjukan seluruh gerak ventilasi yang telah dirancang.
4. KESIMPULAN
Berdasarkan hasil tahap perancangan, implementasi, pengujian dan analisis sistem yang telah dilakukan sebelumnya , maka dapat diambil beberapa kesimpulan sebagai berikut:
sensor LDR diletakan pada timur, barat dan utara prototype gedung. Sedangkan untuk peletakan sensor DHT11 berada di dalam prototye gedung bertingkat. Nilai output
hasil dari perhitungan Fuzzy merupakan perubahan sudut ventilasi vertikal yang digerakan oleh dua buah motor servo, dimana motor servo 1 bergerak secara horizontal dan motor servo 2 bergerak vertikal.
2. Implementasi metode Fuzzy Sugeno pada sistem ventilasi vertikal solar adaptive ini meliputi fuzzifikasi, inferensi Fuzzy, dan defuzzifikasi. Pada sistem ini memiliki dua aturan dasar Fuzzy yaitu yang pertama untuk menentukan gerak servo horizontal ke arah timur dan barat dengan rentang sudut dari 0˚ sampai 180˚ dan yang kedua aturan fuzzy untuk servo vertikal ke arah utara dan selatan dengan rentang sudut dari 0˚ sampai 90˚. Pada proses fuzzifikasi memiliki 2 variabel yaitu variabel LDR dan suhu. Variabel LDR memiliki 5 himpunan keanggotaan yaitu gelap, redup, sedang, terang dan sangat terang. Sedangkan variabel suhu memiliki 3 himpunan keanggotaan yaitu dingin, normal dan panas. Proses inferensi fuzzy merupakan penggabungan aturan berdasarkan himpunan dari setiap variabel LDR dan suhu. Terdapat 75 aturan untuk keluaran servo1 dan 15 aturan untuk keluaran servo2. Proses terakhir adalah defuzzifikasi dengan menggunakan medote MIN-MAX yang selanjutnya pada setiap variabel kondisi keluaran akan dicari nilai terbesarnya (MAX).
3. Pengujian metode fuzzy dilakukan dengan cara membandingkan perhitungan pada sistem dengan perhitungan secara manual. Hasil dari perhitungan tersebut sama, baik dari perhitungan secara manual maupun perhitungan dari sistem. Sistem dapat menentukan berbagai kondisi keluaran yaitu gerak servo dengan input berupa variabel LDR dan suhu yang berbeda-beda. Hal ini menunjukkan hasil dari pengujian metode fuzzy pada sistem sesuai dengan perancangan. Persentase keberhasilan pada pengujian sebesar 100% yang membuktikan bahwa sistem dapat bekerja dengan baik dalam menentukan berbagai kondisi.
DAFTAR PUSTAKA
Fathabadi, H. (2016). Comparative study between two novel sensorless and sensor based dualaxis. Solar Energy, 67-76.
Frearson, A. (2014). dezeen. Retrieved 2017,
PELACAK CAHAYA MATAHARI
OTOMATIS BERBASIS
MIKROKONTROLER.
Hill, S. H. (n.d.). What do Prototypes Prototype?
J, P. (2015). Design of one axis three position solar tracking system for paraboloidal dish solar collector .
Karen Kensek, R. H. (2011). Environment control systems for sustainable design: a methodology for testing, simulating and comparing kinetic facade systems.
Livinti Petru, G. M. (2015). PWM Control of a DC Motor Used to Drive a Conveyor Belt.
M.H.M. Sidek, N. A. (2017). Automated Positioning Dual-Axis Solar Tracking System with Precision Elevation.
N.Othman. (2013). Performance Analysis of Dual-axis Solar.
Nagy, Z. (2016). The Adaptive Solar Facade: From concept.
Rafiuddin Syam, P. (2013). Dasar Dasar Teknik Sensor. Makasar.
Saelan, A. (2009). LOGIKA FUZZY.
Sudiro, S. A. (2010, April 17). gunadarma.ac.id.
Retrieved 2016
Suwardi, T. (2016). Perancangan Sistem Tracking Cahaya Matahari dengan Sensor Cahaya Untuk Optimalisasi Panel Surya Menggunakan Logika Fuzzy. Minor Thesis.
Syahriana Syam, S. B. (2013). PENGARUH
BUKAAN TERHADAP