Universitas Kristen Maranatha
ABSTRAK
Sistem sensor infra merah terdiri dari LED infra merah dan fotodioda. Fotodioda merupakan detektor cahaya infra merah yang dibantu penguat transistor. Dalam perancangan ini digunakan untuk mendeteksi kecepatan dan panjang benda.
Proses pengukuran kecepatan dan panjang pada benda bergerak diawali dengan benda melewati sensor infra merah. Fotodioda akan mengubah cahaya yang masuk menjadi tegangan, besaran tegangan akan masuk ke dalam rangkaian dan akan didapat keluaran logika sebagai masukan untuk mikrokontroler. Data yang masuk ke dalam mikrokontroler akan diproses dengan program yang sudah dibuat dengan menggunakan CodeVision ATMega. Dengan menggunakan rumus kecepatan dalam fisika yaitu jarak dibagi waktu maka hasil pengukuran akan tampil di dalam LCD 2x16.
Universitas Kristen Maranatha
ABSTRACT
Infrared sensor system consists of an infrared LED and photo diode. Photo diode is an infrared light detector which assisted the transistor amplifier. In this scheme is used to detect the speed and length of objects.
The process of detecting speed and length of an object started when an object passed through the infrared sensor. Photo diodes will transform the incoming light into a voltage, the amount of voltage going into the series and will get the logic output as input to the microcontroller. Data is entered into the microcontroller will be processed by the program that have made using CodeVision ATMega. Using the formula in physics is the distance divided by time, the result will appear on 2x16 LCD screen
Universitas Kristen Maranatha
2.1.4.1. On-chip In-System Programmable Flash Memory 15
2.1.4.2. SRAM Data Memory 16
Universitas Kristen Maranatha
Gambar 2.22. Transistor 37
Gambar 2.23. Kapasitor 37
Gambar 3.1. Blok Diagram 48
Gambar 3.2. Penempatan Sensor 49
Gambar 3.3. Rangkaian Receiver Infra Red 50
Gambar 3.4. Rangkaian Output Relay 50
Gambar 3.5. Rangkaian Transmitter Infrared 51
Gambar 3.6. ATMega 16 Board 51
Gambar 3.7. Konfigurasi LCD 53
1
Universitas Kristen Maranatha
BAB I
PENDAHULUAN
1.1. Latar Belakang
Dewasa ini, perkembangan teknologi semakin berkembang ke arah yang lebih maju. Berbagai aspek kehidupan sudah menerapkan betapa majunya teknologi. Bahkan teknologi sudah merambah ke aspek keamanan dan ketertiban masyarakat. Di negara maju teknologi untuk menunjang kedua aspek tersebut sudah diterapkan.
Secara spesifik, teknologi diterapkan di dalam permasalahan lalu lintas. Di hampir seluruh negara maju, para polisi lalu lintas sudah dilengkapi dengan teknologi yang canggih untuk menangani permasalahan lalu lintas ini. Salah satunya adalah penggunaan alat pengukur kecepatan. Teknologi ini hamper tidak ada di Indonesia. Padahal jumlah pelanggar lalu lintas tergolong sangat tinggi. Walaupun di jalan raya atau jalan tol terdapat rambu batas kecepatan maksimal, tetapi para polisi lalu lintas tidak dapat menilang karena ketiadaan alat yang memadai unuk mengetahui kecepatan kendaraan yang melintas.
2
Universitas Kristen Maranatha
Alat ini dimaksudkan untuk memudahkan aparat kepolisian mengetahui kecepatan kendaraan yang melanggar ataupun tidak.
1.2. Identifikasi Masalah
1. Bagaimana mengukur kecepatan dengan menggunakan sensor inframerah? 2. Data apa saja yang akan muncul di dalam layar LCD?
1.3. Tujuan
1. Untuk mengetahui kecepatan kendaraan dengan menggunakan sensor infra merah.
2. Selain kecepatan objek, data yang akan muncul mengenai objek yang melewati sensor adalah panjangnya objek.
1.4. Pembatasan Masalah
1. Alat ini menggunakan dua sensor infra merah.
2. Alat ini dibuat dengan menggunakan program CodeVision AVR ATMega 16.
3. Alat ini mempunyai output tampilan di LCD 2 x 16.
4. Alat ini akan diuji coba pada sebuah prototype dengan asumsi jalan raya searah dan tidak ada hambatan.
3
Universitas Kristen Maranatha
6. Menggunakan baterai sebagai sumber tegangan sensor dan adaptor sebagai sumber tegangan ATMega 16 board.
1.5. Sistematika Penulisan
Bab I : Pendahuluan
Membahas tentang latar belakang, identifikasi masalah, tujuan, pembatasan masalah, dan jadwal pengerjaan.
Bab II : Kerangka Teoritis
Membahas tentang teori-teori yang menunjang topik Tugas Akhir.
Bab III : Perancangan dan Pemodelan
Membahas tentang perancangan alat pengukur kecepatan dengan sensor infra merah yang akan dibuat.
Bab IV : Pengamatan Data
4
Universitas Kristen Maranatha
Bab V : Kesimpulan dan Saran
LAMPIRAN A
A-1 float waktuTotal = 0;
float kecepatan = 0; char buffer1[16]; char buffer2[16];
// Alphanumeric LCD Module functions #asm
.equ __lcd_port=0x15 ;PORTC #endasm
#include <lcd.h>
// Declare your global variables here void ulang()
// Declare your local variables here // Input/Output Ports initialization // Port A initialization
A-2
Universitas Kristen Maranatha
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTB=0xff;
DDRB=0xff;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTD=0x00;
DDRD=0x00;
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: Timer 0 Stopped // Mode: Normal top=FFh // OC0 output: Disconnected TCCR0=0x00;
TCNT0=0x00; OCR0=0x00;
// Timer/Counter 1 initialization // Clock source: System Clock // Clock value: Timer 1 Stopped // Mode: Normal top=FFFFh // OC1A output: Discon. // OC1B output: Discon. // Noise Canceler: Off
A-3
// Timer/Counter 2 initialization // Clock source: System Clock // Clock value: Timer 2 Stopped // Mode: Normal top=FFh // OC2 output: Disconnected ASSR=0x00;
TCCR2=0x00; TCNT2=0x00; OCR2=0x00;
// External Interrupt(s) initialization // INT0: Off
// INT1: Off // INT2: Off MCUCR=0x00; MCUCSR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization TIMSK=0x00;
// Analog Comparator initialization // Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off ACSR=0x80;
SFIOR=0x00;
A-4
waktuTotal = ((float)waktuX1 + (float)waktuX2 + (float)waktuX1X2) / 100; kecepatan = 1 / waktuTotal;
sprintf(buffer1,"V: %0.002f Km/H ",kecepatan*3.6); lcd_gotoxy(0,0);
lcd_puts(buffer1); delay_ms(10);
LAMPIRAN B
B-1
Universitas Kristen Maranatha
LAMPIRAN B
DIAGRAM SKEMATIK
B-2
Universitas Kristen Maranatha
B-4
Universitas Kristen Maranatha
B.3. Transmitter Infra Merah
R1 = 220 K
C1 = 1KpF 50 V
C2 = 100KpF 50 V
IC = 17555
D1 = LED
LAMPIRAN C
C-1
Universitas Kristen Maranatha
LAMPIRAN C
FOTO ALAT
C.1. Hardware
C-2
Universitas Kristen Maranatha
C-3
C-4
Universitas Kristen Maranatha
47
Universitas Kristen Maranatha
BAB III
PERANCANGAN DAN PEMODELAN
Pada bab ini akan membahas mengenai perancangan dan pemodelan serta realisasi dari perangkat keras dan perangkat lunak untuk alat pengukur kecepatan dengan sensor infra merah.
3.1. Perancangan Perangkat Keras (Hardware)
Perancangan alat pengukur kecepatan dengan sensor infra merah dimulai dengan perancangan hardware yaitu : sensor infra merah (receiver dan transmitter), ATMega 16, LCD 2x16, buzzer, dan kabel.
3.1.1. Blok Diagram
48
Universitas Kristen Maranatha
Batas kecepatan berbunyinya buzzer yaitu 3.96 km/h ditentukan berdasarkan percobaan yang telah dilakukan. Percobaan yang dilakukan menggunakan benda yang digerakkan dengan tangan sehingga didapat ketika kecepatan 3.96 km/h tangan sudah bergerak cepat.
Gambar 3.1. Blok Diagram
3.1.2. Sensor Infra Merah
Alat pengukur kecepatan benda ini bekerja berdasarkan respon sensor yang dihubungkan ke microcontroller. Sensor yang dipakai berupa transmitter dan receiver infra merah sebanyak dua pasang. Transmitter yang digunakan berupa LED yang memancarkan sinar infra merah sedangkan receiver yang digunakan adalah fotodioda. Fotodioda bekerja berdasarkan terdeteksinya sinar infra merah. Perancangan penempatan sensor seperti gambar 3.2.
Transmitter Receiver
Transmitter Receiver
AVR
Buzzer
49
Universitas Kristen Maranatha
Gambar 3.2. Penempatan Sensor
Pada kondisi normal kedua sensor S1 dan S2 akan menerima cahaya infra merah dari IR1 dan IR2. Jika ada benda melintas sesuai dengan arah lintasan (tanda panah ke atas pada gambar 3.2), maka benda tersebut akan menghalangi jalur cahaya infra merah IR1 untuk dapat mencapai sensor S1. Kondisi ini oleh microcontroller sebagai saat 'start' perhitungan waktu. Kemudian benda akan bergerak sampai melewati IR2 dan S2, kondisi ini dianggap oleh microcontroller sebagai saat 'stop' perhitungan waktu.
50
Universitas Kristen Maranatha
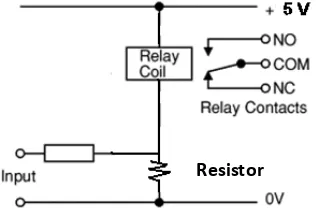
Receiver infra merah sebagai penerima sinyal, akan terhubung dengan rangkaian penguat transistor seperti gambar 3.3. Output dari penguat transistor ini akan terhubung dengan relay. Output yang dihasilkan oleh relay akan terhubung dengan suatu rangkaian (gambar 3.4). Output dari rangkaian (gambar 3.4) menjadi input microcontroller.
Gambar 3.3. Rangkaian Receiver Infra merah
Gambar 3.4. Rangkaian Output Relay
51
Universitas Kristen Maranatha
Dalam rangkaian transmitter seperti gambar 3.5, pembangkit sinyal akan diteruskan ke LED yang kemudian akan memancarkan sinar infra merah. IC yang digunakan adalah IC 17555 yang berfungsi sebagai timer.
Gambar 3.5. Rangkaian Transmitter Infra Merah
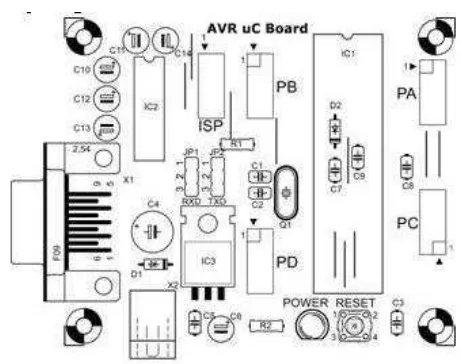
3.1.3. ATMega 16
52
Universitas Kristen Maranatha
AVR ATMega 16 ini dipakai sebagai tempat di mana program berada. Port A dipakai sebagai input untuk sensor infra merah. Dengan data port input nya adalah : PA.0 dan PA.7.
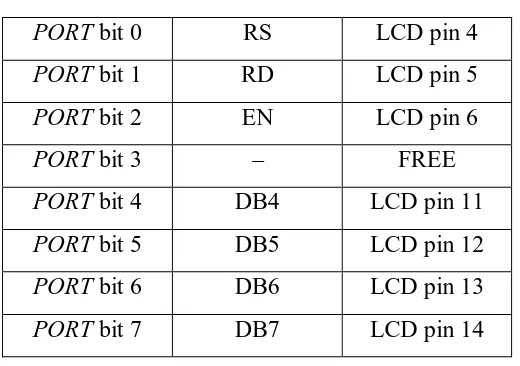
Pada Port C digunakan sebagai port untuk output tampilan LCD, tampilan berupa informasi-informasi yang di perlukan seperti kecepatan dan panjangnya kendaraan. Konfigurasinya adalah sebagai berikut:
Tabel 3.1. Konfigurasi Port C
PORT bit 0 RS LCD pin 4 berfungsi sebagai output alarm. Dengan data port output PB.0.
3.1.4. LCD 2x16
53
Universitas Kristen Maranatha
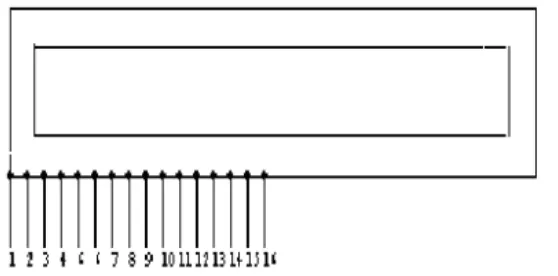
Gambar 3.7. Konfigurasi LCD
Vss (pin 1), merupakan pin tegangan referensi 0 Volt (ground). Vcc (pin 2), merupakan pin tegangan +5 Volt.
Vee (pin 3), berfungsi untuk mengatur contrast LCD. Vee dihubungkan dengan ground.
RS (pin 4), Port C bit 0.
R/W (pin 5), Port C bit 1.
EN (pin 6), Port C bit 2.
DB4 (pin 11) – DB7 (pin 14), Port C bit 4 – 7.
V (pin 15), dihubungkan ke pin 2 dengan resistor 220 Ω
V (pin 16), dihubungkan ke pin 1.
3.1.5. Buzzer
54
Universitas Kristen Maranatha
katodanya dihubungkan sebagai input ATMega 16 di Port B, dengan konfigurasi PB.0.
3.2. Perancangan Perangkat Lunak (Software)
3.2.1. Diagram Alir
Program dimulai ketika alat dinyalakan dengan menggunakan sumber tegangan sebesar 7.5 Volt. Setelah itu program akan mulai membaca input yang berasal dari sensor infra merah pertama. Program akan terus menunggu sampai ada input infra merah pertama. Apabila input dari infra merah pertama sudah masuk, program akan melanjutkan pembacaan input yang berasal dari infra merah kedua. Program akan terus menunggu sampai ada input dari infra merah kedua.
Jika input dari infra merah pertama dan kedua sudah ada, program akan melanjutkan proses masukan dari kedua infra merah dengan menggunakan proses perhitungan dengan menggunakan rumus yang ada. Misalkan waktu untuk benda tersebut bergerak dari S1 ke S2 adalah t dan jarak antara S1 dan S2 adalah s, maka diperoleh kecepatan benda tersebut dengan rumus fisika sederhana: v = s/t. Sedangkan untuk menghitung panjang benda dengan rumus x = v*t1, di mana t1 adalah waktu ketika S1 putus sampai terhubung
55
Universitas Kristen Maranatha
56
Universitas Kristen Maranatha
Gambar 3.8. Diagram Alir Input
IR1
Tampil LCD
Delay 2s Input IR2
Proses Perhitungan
Kecepatan melebihi
batas?
Buzzer Bunyi
Y T
T
57
Universitas Kristen Maranatha
3.2.2. CodeVision ATMega
Software yang dipakai dalam pembuatan program untuk alat pengukur kecepatan ini adalah dengan menggunakan CodeVision AVR. Code Vision AVR C Compiler pada dasarnya merupakan perangkat lunak pemrograman microcontroller keluarga AVR berbasis bahasa C.
Pada tool CodeVision AVR ini bisa ditentukan port-port dari microkontroller AVR yang berfungsi sebagai input maupun output, serta bisa juga ditentukan tentang penggunaan fungsi-fungsi internal dari AVR.
Dalam program ini terdapat proses berjalannya alat secara keseluruhan. Program ini diunduh secara langsung ke chip ATMega 16. Langkah – langkah pembuatan program dengan menggunakan CodeVision AVR adalah sebagai berikut:
1. Jalankan CodeVisionAVR, kemudian klik File New, Pilih Project.
2. “Do you want to use the CodeWizardAVR?” Klik Yes.
3. Pilihlah Chip yang digunakan, chip : ATmega16, clock : 16.000000 MHz.
4. Lakukanlah setting sebagai berikut : Port A = Sebagai Input
Port B = Sebagai Output
58
Universitas Kristen Maranatha
7. Klik Project Configure, kemudian pilih menu After Make atau After Build dan aktifkan Program. Klik OK jika sudah.
8. Untuk meng-compile project, klik Project Make. Pastikan program tidak ada yang error.
9. Jika tidak ada error maka file siap diunduh ke chip. Pastikan koneksi kabel downloader dan chip sudah terpasang dengan benar, klik Tools Chip Programmers.
66
Universitas Kristen Maranatha
BAB V
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Berdasarkan data pengamatan dan analisa data dapat diambil kesimpulan sebagai berikut :
Sistem yang dirancang berupa alat pengukur kecepatan dengan sensor infra merah sudah berhasil direalisasikan.
Buzzer sudah dapat berfungsi dengan baik, yaitu menyala ketika kecepatan benda melampaui batas kecepatan yaitu 3.9 km/h.
Kurangnya keakuratan hasil data pengamatan dikarenakan kesulitan menyamakan nilai clock dengan stopwatch sehingga mempengaruhi hasil perhitungan secara teoritis. Juga dikarenakan adanya toleransi dari komponen dan clock pada ATMega 16.
5.2. Saran
Setelah mengevaluasi Tugas Akhir ini, penulis berharap Tugas Akhir ini dapat dikembangkan lebih lanjut dengan beberapa saran sebagai berikut :
67
Universitas Kristen Maranatha
Database juga dapat ditambahkan dengan penggolongan kendaraan berdasarkan panjangnya kendaraan yang melintas.
Perangkat keras dapat ditambahkan dengan CCTV dan dapat mengambil gambar kendaraan yang melebihi batas kecepatan agar kendaraan yang melanggar dapat ditilang lewat plat nomor kendaraan yang terekam.
Percobaan yang dilakukan pada prototype sebaiknya relay sebagai saklar mekanik dapat diganti dengan saklar elektronik agar tidak terdapat delay yang terlalu lama dalam perhitungan sehingga error dapat lebih kecil.
68
Universitas Kristen Maranatha
DAFTAR PUSTAKA
Andrianto, Heri, Pemrograman Mikrokontroler AVR ATMEGA 16 Menggunakan Bahasa C (CodeVision AVR), Informatika, Bandung, 2008.
http://bank-je.com/ilmu-listrik/kapasitor-komponen-pasif-elektonika/,terakhir diakses tanggal 22 Juni 2010.
http://bank-je.com/ilmu-listrik/komponen-dasar-elektronika-resistor/, terakhir diakses tanggal 22 Juni 2010.
http://elektronika-elektronika.blogspot.com/2007/04/buzzer.html, terakhir diakses tanggal 22 Juni 2010.
http://opi.110mb.com/opihomepage/pendukung.htm, terakhir diakses tanggal 22 Juni 2010.
http://www.atmel.com/dyn/resources/pro_documents/doc2466.pdf, terakhir diakses tanggal 22 Juni 2010.
http://www.ittelkom.ac.id/library/index.php?view=article&catid=16:mikroprocess
orkontroller&id=142:sistem-sensor-inframerah&option=com_content&Itemid=15, terakhir diakses tanggal 22 Juni 2010
http://mhdfaisal.wordpress.com/2009/12/03/fotodioda/, terakhir diakses tanggal 17 Juli 2010
http://www.alldatasheet.com , terakhir diakses tanggal 22 Juni 2010
69
Universitas Kristen Maranatha
http://www.reuk.co.uk/What-is-a-Transistor.htm, terakhir diakses tanggal 26 Juni 2010.