II-1
BAB II
STUDI PUSTAKA
2.1. Tinjauan Umum
Dalam suatu perancangan sebuah proyek diperlukan adanya aturan-aturan
dan ketentuan yang mengacu pada standar yang berlaku. Standar yang dimaksud
berupa teori-teori dasar yang memuat dan mengatur tata cara dan hal-hal yang
berhubungan dengan perencanaan tersebut. Materi studi pustaka pada umumnya
digunakan untuk memecahkan masalah yang ada, baik untuk menganalisis faktor–
faktor dan data pendukung maupun untuk merencanakan konstruksi. Oleh karena
itu, pada bagian ini kami menguraikan secara global pemakaian
persamaan-persamaan yang akan digunakan untuk memecahkan masalah yang ada.
2.2. Aspek Lalu-Lintas
2.2.1. Kendaraan Rencana
Kendaraan rencana adalah kendaraan yang merupakan wakil dari
kelompoknya yang digunakan untuk merencanakan bagian–bagian dari jalan
raya. Untuk perencanaan geometrik jalan, ukuran lebar kendaraan rencana
akan mempengaruhi lebar lajur yang dibutuhkan. Sifat membelok kendaraan
akan mempengaruhi perencanaan tikungan dan lebar median dimana
kendaraan diperkenankan untuk memutar. Kemampuan kendaraan akan
mempengaruhi tingkat kelandaian yang dipilih, dan tinggi tempat duduk
pengemudi akan mempengaruhi jarak pandangan pengemudi (Silvia Sukirman, 1994).
Kendaraan rencana dikelompokkan menjadi 8 kategori menurut Bina
II-2
1) Golongan 1:
Sepeda motor (MC) dengan 2 atau 3 roda (meliputi sepeda motor
dan kendaraan roda 3 sesuai sistem klasifikasi Bina Marga).
2) Golongan 2:
Sedan, jeep dan station wagon (sesuai sistem klasifikasi Bina Marga)
3) Golongan 3:
Opelet, pick-up oplet, combi dan minibus (sesuai sistem klasifikasi
Bina Marga)
- Kecuali combi, umumnya sebagai kendaraan penumpang
umum, maksimum 12 tempat duduk, seperti : mikrolet, angkot,
minibus
- Pick-up yang diberi penaung, kanvas/ pelat dengan route
dalam kota atau angkutan pedesaan
4) Golongan 4:
Pick-up, micro truck dan mobil hantaran atau pick-up box (sesuai
sistem klasifikasi Bina Marga)
- Umumnya sebagai kendaraan barang, maksimal beban sumbu
belakang 3,5 ton dengan bagian belakang sumbu tunggal roda
tunggal (STRT)
5) Golongan 5a: Bus Kecil
- Sebagai kendaraan penumpang umum dengan tempat duduk
16-26 buah seperti : kopaja, metromini, elf dengan bagian
belakang sumbu tunggal roda ganda (STRG), panjang
II-3
Golongan 5b: Bus Besar
Sebagai kendaraan penumpang umum dengan tempat duduk 30-56
buah seperti : bus malam, Bus Kota, Bus Antar Kota dengan bagian
belakang sumbu tunggal roda ganda (STRG)
6) Golongan 6a: Truck 2 sumbu 4 roda
- Kendaraan barang dengan muatan sumbu terberat 5 ton
(MST-5, STRT) pada sumbu belakang dengan as depan 2 roda dan as
belakang 2 roda
Golongan 6b: Truck 2 sumbu 6 roda
- Kendaraan barang dengan muatan sumbu terberat 8-10 ton
(MST 8-10, STRG) pada sumbu belakang dengan as depan 2
roda dan as belakang 4 roda
7) Golongan 7a: Truck 3 sumbu
- Kendaraan barang dengan 3 sumbu yang tata letaknya STRT
(Sumbu Tunggal Roda Tunggal) dan SGRG (Sumbu Ganda
Roda Ganda)
Golongan 7b: Truck gandengan
- Kendaraan nomor 6 atau 7 yang diberi gandengan bak truck
dan dihubungkan dengan batang besi segitiga disebut juga Full
Trailler Truck
Golongan 7c: Truck semi trailler
- Atau disebut truck tempelan, adalah kendaraan yang terdiri
dari kepala truck dengan 2-3 sumbu yang dihubungkan secara
sendi dengan pelat dan rangka bak yang beroda belakang, yang
II-4
8) Golongan 8:
Kendaraan bertenaga manusia atau hewan di atas roda (meliput
sepeda, becak, kereta kuda dan kereta dorong sesuai sistem
klasifikasi Bina Marga). Catatan: dalam hal ini kendaraan bermotor
tidak dianggap sebagai unsur lalu-lintas, tetapi sebagai unsur
hambatan samping.
2.2.2. Kecepatan Rencana (VR)
Kecepatan rencana pada suatu ruas jalan adalah kecepatan yang dipilih
sebagai dasar perencanaan geometrik jalan yang memungkinkan kendaraan
bergerak dengan aman dan nyaman secara menerus. Kecepatan rencana
sesuai dengan klasifikasi fungsi dan klasifikasi medan jalan dapat dilihat pada
Tabel 2.1 berikut ini:
Tabel 2. 1 Kecepatan Rencana (VR)
Kecepatan Rencana, VR
Fungsi (km/jam)
Datar Bukit Pegunungan
Arteri 70-120 60-80 40-70
Kolektor 60-90 50-60 30-50
Lokal 40-70 30-50 20-30
Sumber : Perencanaan Geometri Jalan Antar Kota, 1997 2.2.3. Volume Lalu Lintas
2.2.3.1. Lalu Lintas Harian Rata-Rata (LHR)
Lalu lintas harian rata-rata adalah jumlah rata-rata lalu lintas
kendaraan bermotor yang dicatat selama 24 jam sehari untuk kedua
II-5
2.2.3.2. Pertumbuhan Lalu Lintas (i)
Volume lalu lintas adalah banyaknya kendaraan yang melintas
atau melewati suatu titik pada suatu ruas jalan pada interval waktu
tertentu yang dinyatakan dalam satuan kendaraan atau satuan mobil
penumpang (smp) (Silvia Sukirman, 1994). Sedangkan volume lalu lintas rencana (LHR) adalah perkiraan volume lalu lintas harian pada akhir
tahun rencana lalu lintas dan dinyatakan dalam smp/hari. Hasil
perhitungan besarnya LHR digunakan sebagai dasar perencanaan jalan,
observasi tentang segala kecenderungan-kecenderungan dengan evaluasi
volume pada masa yang akan datang. Untuk menghitung perkembangan
lalu lintas tiap tahun ada beberapa metode antara lain:
1. Menurut F. D. Hobbs, regresi linier sederhana adalah :
Y = a + bX ... 2- 3
Keterangan:
Y : Besarnya nilai yang diketahui
A : Konstanta
B : Koefisien variabel X
X : Data sekunder dari periode awal
Sedangkan harga a dan b dapat dicari dari persamaan :
∑X = n.a + ∑X ... 2- 4
∑XY = a. ∑X + b. ∑X² ... 2- 5
2. Metode eksponensial
Perhitungan pertumbuhan lalu lintas dengan metode eksponensial
II-6
Rumus umum yang digunakan adalah:
( )
nn LHR i
LHR = 0.1+ ... 2- 6
Keterangan:
LHRn = lalu lintas harian tahun yang dicari
LHR0 = lalu lintas harian tahun awal perencanaan
i = laju pertumbuhan lalu lintas
n = umur rencana
2.2.3.3. Volume Jam Perencanaan (VJP)
Volume jam perencanaan adalah perkiraan volume lalu lintas
pada jam sibuk tahun rencana lalu lintas dan dinyatakan dalam smp/jam.
VJP = LHRT . Faktor k ... 2- 7
Keterangan :
LHRT = lalu lintas harian rata-rata tahunan (kend/hari)
Faktor k = faktor volume lalu lintas pada jam sibuk
Untuk penentuan faktor k dapat dilihat pada Tabel 2.2
Tabel 2. 2 Faktor k
VLHR (smp/hari) Faktor k (%)
> 50000 4 – 6
30000 – 50000 6 – 8
10000 – 30000 6 – 8
5000 – 10000 8 – 10
1000 – 5000 10 – 12
< 1000 12 – 16
II-7 2.2.4. Arus dan Komposisi Lalu Lintas
Arus lalu lintas adalah jumlah kendaraan yang melalui suatu titik pada
ruas jalan tertentu persatuan waktu, yang dinyatakan dalam kend/jam (Qkend)
atau smp/jam (Qsmp). Semua nilai arus lalu lintas (per arah dan total)
dikonversikan menjadi satuan mobil penumpang (smp) dengan menggunakan
ekivalensi mobil penumpang (emp) yang diturunkan secara empiris utuk
berbagai tipe kendaraan sesuai keterangan pada pembagian tipe kendaraan
sebelumnya.
2.2.5. Nilai Konversi Kendaraan
Perhitungan nilai LHR dilakukan dengan menghitung jumlah
kendaraan yang lewat berdasarkan jenis dan nilai konversi kendaraan. Nilai
konversi jenis kendaraan terhadap ekivalensi mobil penumpang (emp)
berdasarkan MKJI (1997) dapat dilihat pada Tabel 2.3. sampai dengan Tabel
II-8 Tabel 2. 3 Nilai EMP Jalan Dua Lajur – Dua Arah Tak Terbagi (2/2 UD)
Tipe Alinyemen
Arus Total (kend/jam)
EMP
MHV LB LT MC
Lebar Jalur Lalu Lintas (m)
< 6 6 - 8 > 8
Datar
0 1,2 1,2 1,8 0,8 0,6 0,4
800 1,8 1,8 2,7 1,2 0,9 0,6
1350 1,5 1,6 2,5 0,9 0,7 0,5
≥1900 1,3 1,5 2,5 0,6 0,5 0,4
Bukit
0 1,8 1,6 5,2 0,7 0,5 0,3
650 2,4 2,5 5,0 1,0 0,8 0,5
1100 2,0 2,0 4,0 0,8 0,6 0,4
≥1600 1,7 1,7 3,2 0,5 0,4 0,3
Gunung
0 3,5 2,5 6,5 0,6 0,4 0,2
450 3,0 3,2 5,5 0,9 0,7 0,4
900 2,5 2,5 5,0 0,7 0,5 0,3
II-9 Tabel 2. 4 Nilai EMP Jalan Empat Lajur–Dua Arah Terbagi & Tak Terbagi
Tipe Alinyemen
Arus Total (kend/jam) EMP
Jalan terbagi
• EMP Kendaraan Ringan (LV) selalu 1,0
• EMP Bus Besar (LB) adalah 2,5 untuk arus <1000 kend/jam dan 2,0 untuk keadaan lainnya
Sumber : Manual Kapasitas Jalan Indonesia, 1997
2.2.6. Analisis Kecepatan Arus 2.2.6.1. Kecepatan Arus Bebas
Persamaan untuk penentuan kecepatan arus bebas mempunyai
bentuk umum sebagai berikut:
(
FVO FVW)
FFVSF FFVRCFV = + . . ... 2- 8
Keterangan:
II-10
kondisi lapangan (km/jam)
FVO = kecepatan arus bebas dasar kendraan ringan pada
jalan dan alinyemen yang diamati
FVW = penyesuaian kecepatan akibat lebar jalan (km/jam)
FFVSF = faktor penyesuaian akibat hambatan samping dan
lebar bahu
FFVRC = faktor penyesuaian akibat kelas fungsi jalan dan
guna jalan
2.2.6.2. Kecepatan Arus Bebas Dasar Kendaraan Ringan
Kecepatan arus bebas dasar kendaraan ringan adalah kecepatan
arus bebas segmen jalan untuk suatu kondisi ideal yang telah ditentukan
sebelumnya. Berdasarkan MKJI (Manual Kapasitas Jalan Indonesia) tahun
II-11 Tabel 2. 5 Kecepatan Arus Bebas Dasar (FVO)
Tipe Jalan/ Kecepatan Arus Bebas Dasar (km/jam)
Tipe Alinyemen LV MHV LB LT MC
6 lajur terbagi
•datar 83 67 86 64 64
•bukit 71 56 68 52 58
• gunung 62 45 55 40 55
4 lajur terbagi
• datar 78 65 81 62 64
• bukit 68 55 66 51 58
• gunung 60 44 53 39 55
4 lajur tak terbagi
• datar 74 63 78 60 60
• bukit 66 54 65 50 56
• gunung 58 43 52 39 53
2 lajur tak terbagi
• datar 68 60 73 58 55
datar SDC B 65 57 69 55 54
datar SDC C 61 54 63 52 53
• bukit 61 52 62 49 53
• gunung 55 42 50 38 51
Sumber : Manual Kapasitas Jalan Indonesia, 1997
2.2.6.3. Penyesuaian Kecepatan Arus Bebas Akibat Lebar Efektif Jalur Lalu Lintas
Berdasarkan MKJI tahun 1997 nilai dari faktor ini dapat dilihat
II-12 Tabel 2. 6 Penyesuaian Kecepatan Arus Bebas Akibat Lebar Efektif Jalur
Lalu Lintas
Sumber : Manual Kapasitas Jalan Indonesia, 1997
2.2.6.4. Penyesuaian Kecepatan Arus Bebas Akibat Hambatan Samping
Adalah faktor penyesuaian untuk kecepatan arus bebas dasar akibat
hambatan samping dan lebar bahu jalan. Berdasarkan MKJI tahun 1997
II-13 Tabel 2. 7 Faktor Penyesuaian Kecepatan Arus Bebas Akibat Hambatan
Samping (FFVSF)
Faktor Penyesuaian Akibat Hambatan Samping dan Lebar Bahu
Lebar bahu Efektif WS (m)
Faktor Penyesuaian Akibat Hambatan Samping dan Lebar Bahu
Lebar bahu Efektif WS (m)
Sumber : Manual Kapasitas Jalan Indonesia, 1997
Untuk jalan dengan 6 lajur dapat ditentukan dengan menggunakan nilai
FFVSF bagi jalan 4 lajur dalam Tabel 2.7 dengan modifikasi sebagai
berikut:
(
SF)
SF FFV
FFV6, =1−0,8.1− 4, ... 2- 9
Dimana:
FFV6,SF = faktor penyesuaian kecepatan arus bebas untuk 6 lajur
II-14 2.2.6.5. Penyesuaian Kecepatan Arus Bebas Akibat Kelas Fungsional
Adalah faktor penyesuaian untuk kecepatan arus bebas dasar akibat
kelas fungsional jalan (arteri, kolektor, atau lokal) tata guna lahan.
Berdasarkan MKJI tahun 1997 nilai dari faktor ini dapat dilihat pada Tabel
2.8.
Tabel 2. 8 Faktor Penyesuaian Kecepatan Arus Bebas Akibat Kelas Fungsional Jalan (FFVRC)
Tipe Jalan
Faktor penyesuaian (FFVRC)
Pengembangan Samping Jalan (%)
0 25 50 75 100
Faktor penyesuaian (FFVRC)
Pengembangan Samping Jalan (%)
0 25 50 75 100
2 lajur tak terbagi
Arteri 1,00 0,98 0,97 0,96 0,94
Kolektor 0,94 0,93 0,91 0,90 0,88
Lokal 0,90 0,88 0,87 0,86 0,84
Sumber : Manual Kapasitas Jalan Indonesia, 1997
2.2.7. Kapasitas
Kapasitas adalah arus lalu lintas maksimum yang dapat dipertahankan
per satuan jam yang melewati suatu titik di jalan pada kondisi yang ada.
Kapasitas jalan dinyatakan dalam satuan mobil penumpang (smp), dalam
MKJI (1997) dapat diperoleh dengan menggunakan rumus :
II-15
Keterangan :
C = kapasitas jalan (smp/jam)
Co = kapasitas dasar (smp/jam)
FCW = faktor penyesuaian lebar jalan
FCSP = faktor penyesuaian pemisah arah ( hanya jalan tak terbagi)
FCSF = faktor penyesuaian hambatan samping dan bahu jalan dari
kerb
2.2.7.1. Kapasitas Dasar
Kapasitas dasar adalah kapasitas suatu segmen jalan untuk suatu
kondisi yang ditentukan sebelumnya (geometrik, pola arus lalu lintas dan
faktor lingkungan). Menurut MKJI (1997) nilai dari faktor ini dapat
II-16 Tabel 2. 9 Nilai Kapasitas Dasar (Co)
Tipe Jalan / Tipe Alinyemen Kapasitas Dasar Total Kedua Arah (Smp/Jam/Lajur)
4 Lajur Terbagi
Datar 1900
Bukit 1850
Gunung 1800
4 Lajur Tak Terbagi
Datar 1700
Bukit 1650
Gunung 1600
2 Lajur Tak Terbagi
Datar 3100
Bukit 3000
Gunung 2900
Sumber : Manual Kapasitas Jalan Indonesia, 1997
2.2.7.2. Faktor Penyesuaian Kapasitas Akibat Lebar Jalur Lalu Lintas
Merupakan faktor penyesuaian untuk kapasitas dasar akibat
lebar jalur lalu lintas, menurut MKJI (1997) faktor ini dapat dilihat pada
II-17 Tabel 2. 10 Faktor Penyesuaian Kapasitas Akibat Lebar Jalur Lalu Lintas
Tipe Jalan
Lebar Efektif Jalur Lalu
Lintas (Wc) FC
W
(m)
4 Lajur Terbagi Per Lajur
6 Lajur Terbagi 3,0 0,91
3,25 0,96
3,50 1,00
3,75 1,03
4 Lajur Tak Terbagi
Per Lajur
3,0 0,91
3,25 0,96
3,50 1,00
3,75 1,03
2 Lajur Tak Terbagi
2Lajur Tak Terbagi
Total Kedua Arah
5 0,69
Sumber : Manual Kapasitas Jalan Indonesia, 1997
2.2.7.3. Faktor Penyesuaian Kapasitas Akibat Pemisah Jalan
Merupakan faktor penyesuaian untuk kapasitas dasar akibat
pemisah arah dan hanya diperuntukkan untuk jalan 2 arah tak terbagi,
II-18 Tabel 2. 11 Faktor Penyesuaian Kapasitas Akibat Pemisah Arah (FCSP)
Pemisahan Arah SP %-% 50-50 55-45 60-40 65-35 70-30
Sumber: Manual Kapasitas Jalan Indonesia, 1997
2.2.7.4. Faktor Penyesuaian Kapasitas Akibat Hambatan Samping
Merupakan faktor penyesuaian untuk kapasitas dasar akibat
hambatan samping sebagai fungsi dari lebar bahu, menurut Manual
Kapasitas Jalan Indonesia (1997) nilai dari faktor ini dapat dilihat pada
Tabel 2.12.
Tabel 2. 12 Faktor Penyesuaian Kapasitas Akibat Hambatan Samping (FCSF)
Tipe Jalan Kelas Hambatan Samping (SFC)
FCSF
Lebar Bahu Efektif Ws (m)
≤ 0,5 m 1 m 1,5 m ≥ 2 m
II-19
Faktor penyesuaian kapasitas untuk 6 lajur dapat ditentukan
dengan menggunakan nilai FCSF untuk jalan 4 lajur, kemudian
dimodifikasi dengan menggunakan persamaan berikut:
FC6,SF = 1 – 0,8 . ( 1 - FFV4,SF ) ... 2- 11
Dimana :
FC6,SF = faktor penyesuaian kapasitas untuk jalan 6 lajur
FC4,SF = faktor penyesuaian kapasitas untuk jalan 4 lajur
Sumber: Manual Kapasitas Jalan Indonesia, 1997
2.2.8. Tingkat Pelayanan
Tingkat pelayanan jalan adalah kemampuan suatu jalan untuk
melayani lalu lintas yang lewat. Sedangkan volume pelayanan adalah volume
maksimum /kapasitas yang dapat ditampung oleh suatu jalan sesuai dengan
tingkat pelayanan. Untuk menganalisis tingkat pelayanannya, dapat
digunakan MKJI (1997) yang menggunakan istilah kinerja jalan dengan
indikator Derajat Kejenuhan atau Degree of Saturation (DS), kecepatan dan waktu tempuh. Menurut MKJI (1997), besarnya Derajat Kejenuhan adalah :
DS =
C Q
... 2- 12
Keterangan:
Q = volume kendaraan (smp/jam)
C = kapasitas jalan (smp/jam)
Bila Derajat Kejenuhan (DS) yang didapat < 0,75, maka jalan tersebut
masih memenuhi/ layak ( tidak terjadi kemacetan). Sedangkan apabila Derajat
Kejenuhan yang didapat > 0,75 maka harus dilakukan kajian lebih lanjut agar
II-20 2.3. Konsep Permodelan Transportasi
Model merupakan penyederhanaan realita untuk mendapatkan
tujuan tertentu, yaitu penjelasan dan penertian yang lebih mendalam serta
untuk kepentingan peramalan. (Tamin, O. Z., 2000)
Beberapa model dapat mencerminkan realita secara cepat. Secara
umum dapat dikatakan bahwa semakin mirip suatu model dengan realitanya,
semakin sulit membuat model tersebut. Model yang canggih belum tentu
merupakan model yang baik, kadang – kadang model sederhana dapat
menghasilkan keluaran yang jauh lebih baik dan sesuai untuk tujuan tertentu
dengan situasi dan kondisi tertentu pula. (Tamin, O. Z., 2000)
2.3.1. Metode Konvesional A. Metode Langsung
Pendekatan dengan metode ini sangat tergantung dari hasil
pengukuran data dan survey lapangan. Berikut ini merupakan beberapa
kesulitan yang dihadapi dalam penggunaan metode ini:
Membutuhkan sumber daya yang sangat besar baik itu sumber daya
manusia, biaya maupun waktu.
Sangat tergantung pada ketersediaan dan ketelitian dari surveyor
Galat yang terjadi baik itu teknis dan galat yang timbul akibat faktor
manusia (galat mencatat atau menaksir) cukup besar. (Tamin, O. Z., 2000)
B. Metode Tidak Langsung
Pendekatan dengan menggunakan metode tidak langsung dilakukan
dengan membentuk suatu model dari faktor – faktor yang dipertimbangkan
mempunyai hubungan yang erat dengan pola pergerakan yang hendak
II-21
Sampai saat ini beberapa prosedur matematis telah dikembangkan,
secara umum dikelompokkan menjadi dua bagian utama (Bruton, 1981;
dalam Tamin, O. Z., 2000):
B.1. Metode analogi
Pada metode ini digunakan satu nilai tingkat pertumbuhan terhadap
pergerakan saat ini untuk mendapatkan pergerakan pada masa yang
akan datang. Beberapa metode telah dikembangkan oleh beberapa
peneliti, dan setiap metode menggunakan asumsi bahwa pola
pergerakan pada saat sekarang dapat diproyeksikan ke masa yang
akan datang dengan menggunakan nilai tingkat pertumbuhan zona.
Semua metode dalam metode analogi mempunyai persamaan
umum sebagai berikut:
Tid = tid . E
... 2- 13Dimana:
Tid = pergerakan masa mendatang dari zona i ke zona d
tid = pergerakan masa sekarang dari zona i ke zona d
E = tingkat pertumbuhan
(Tamin, O. Z., 2000)
B.1.1. Metode Seragam
Metode tanpa batas atau metode seragam adalah metode tertua
dan paling sederhana, yang secara matematis dapat dijelaskan sebagai
berikut:
II-22
Dimana :
T = Total pergerakan pada masa mendatang di dalam daerah
kajian
t = Total pergerakan pada masa sekarang di dalam daerah kajian
E = Tingkat pertumbuhan
Seperti contoh matriks berikut:
Tabel 2. 13 MAT pada Masa Sekarang dan Tingkat Pertumbuhan Setiap Zona
Zona 1 2 3 4 oi Oi Ei
1 10 60 80 50 200 300 1.5
2 80 20 100 50 250 250 1 3 20 130 10 50 210 420 2
4 100 80 60 20 260 650 2.5
dd 210 290 250 170 920
Dd 420 435 250 515 1620
Ed 2 1.5 1 3.03 1.76
Sumber: Tamin, O. Z., 2000
Jika pergerakan lalulintas di daerah kajian diperkirakan meningkat
sebesar 76% pada masa mendatang, maka secara sederhana maka semua
sel MAT (tid) dikalikan faktor 1,76 untuk mendapatkan MAT masa
mendatang:
Tabel 2. 14 MAT pada Masa Mendatang dengan E = 1,76
Zona 1 2 3 4 oi Oi
1 18 106 141 88 353 300 2 141 35 176 88 440 250 3 35 229 18 88 370 420
4 176 141 106 35 458 650
dd 370 511 441 299 1620
Dd 420 435 250 515 1620
II-23 B.1.2. Metode Rata–Rata
Metode rata – rata adalah usaha pertama untuk mengatasi adanya
tingkat pertumbuhan daerah yang berbeda–beda. Metode ini menggunakan
tingkat pertumbuhan yang berbeda untuk setiap zona yang dapat
dihasilkan dari permalan tata guna lahan dan bangkitan lalu lintas. Secara
matematis dapat ditulis sebagai berikut:
Tid = tid .
berasal dari zona asli i atau menuju zona tujuan d
ti , tid = Total pergerakan pada saat ini yang berasal dari
zona asal i atau yang menuju zona tujuan d
Secara umum, total pergerakan masa mendatang yang dihasilkan
tidak sama dengan total pergerakan yang didapatkan dari hasil analisis
bangkitan lalu lintas. Akan tetapi diharapkan adalah:
Dimana:
Ti = Total pergerakan masa mendatang dengan zona asal i
Ti(G) = Total pergerakan masa mendatang (dari analisis bangkitan
lalu lintas) dengan zona asal i.
Jadi, proses pengulangan harus dilakukan untuk meminimumkan besarnya
perbedaan tersebut dengan mengatur nilai Ei dan Ed sampai Ti = Ti(G),
II-24 Ei dan Ed
Tabel 2. 15 MAT pada Masa Mendatang dengan Metode Rata–Rata (hasil pengulangan ke–1)
Zona 1 2 3 4 oi Oi Ei
1 17.5 90 100 113.2 320.7 300 0.935 2 120 25 100 100.7 345.7 250 0.723
3 40 227.5 15 125.7 408.2 420 1.029
4 225 160 105 55.3 545.3 650 1.192
dd 402.5 502.5 320 394.9 1619.9
Dd 420 435 250 515 1620
Ed 1.043 0.866 0.781 1.304 1.001
Sumber: Tamin, O. Z., 2000
Tabel 2. 16 MAT pada Masa Mendatang dengan Metode Rata – Rata (hasil pengulangan ke–12)
Zona 1 2 3 4 oi Oi Ei
1 16 66 74 144 300 300 1
2 85 14 54 98 250 250 1
3 41 189 13 178 420 420 1 4 279 166 110 95 650 650 1
dd 421 435 250 515 1620
Dd 420 435 250 515 1620
Ed 0.999 1 1 1 1
II-25
B.1.3. Metode Fratar
Secara sistematis, metode Fratar dapat dinyatakan sebagai:
Tid = tid . Ei . Ed
. ... 2- 16Li =
Ld
=B.1.4. Metode Detroid
Secara matematis, metode Detroid dapat dinyatakan sebagai
berikut:
Tid = tid .
... 2- 17 (Tamin, O. Z., 2000)
Tabel 2. 17 MAT pada Masa Mendatang dengan Metode Detroit (hasil pengulangan ke–1)
Zona 1 2 3 4 oi Oi Ei
1 17 76.7 68.1 129 290.8 300 1.031
2 90.9 17 56.8 86 250.7 250 0.997
3 45.4 221.5 11.4 172 450.3 420 0.933 4 284 170,4 85.2 86 625.5 650 1.039
dd 437.3 485.6 221.5 473.1 1617.2
Dd 420 435 250 515 1620
Ed 0.96 0.896 1.129 1.089 1.002
Sumber: Tamin, O. Z., 2000
Seperti halnya dengan metode rata – rata dan fratar, proses diulang
II-26 tersebut tercapai pada pengulangan ke – 8, sehingga dihasilkan MAT akhir
sebagai berikut:
Tabel 2. 18 MAT pada Masa Mendatang dengan Metode Detroid (hasil pengulangan ke–8)
Zona 1 2 3 4 oi Oi Ei
1 16 68 75 141 300 300 1
2 82 15 61 92 250 250 1
3 40 189 12 180 421 420 0.999
4 283 164 101 102 650 650 1
dd 421 436 249 515 1620
Dd 420 435 250 515 1620
Ed 0.999 0.999 1.001 1 1.002
Sumber: Tamin, O. Z., 2000
B.1.5. Metode Furness
Secara matematis, metode Detroid dapat dinyatakan sebagai
berikut:
Tid = tid . Ei ... 2- 18
Tabel 2. 19 MAT pada Masa Mendatang dengan Metode Furness (hasil pengulangan ke–1)
Zona 1 2 3 4 oi Oi Ei
1 15 90 120 75 300 300 1 2 80 20 100 50 250 250 1 3 40 260 20 100 420 420 1 4 250 200 150 50 650 650 1
dd 385 570 390 275 1620
Dd 420 435 250 515 1620
Ed 1.091 0,763 0.641 1.873 1.002
Sumber: Tamin, O. Z., 2000
Selanjutnya, pada pengulangan ke–2, sel MAT yang dihasilkan
pada pengulangan ke–1 dikalikan dengan tingkat pertumbuhan zona tujuan
II-27 Tabel 2. 20 MAT pada Masa Mendatang dengan Metode Furness
(hasil pengulangan ke – 2)
Zona 1 2 3 4 oi Oi Ei
1 16.4 68.7 76.9 140.5 302.4 300 0.992 2 87.3 15.3 64.1 93.6 260.3 250 0.961 3 43.6 198.4 12.8 187.3 442.2 420 0.95 4 272.7 152.6 96.2 93.6 615.1 650 1.057
dd 420 435 250 515 1620
Dd 420 435 250 515 1620
Ed 1 1 1 1 1
Sumber: Tamin, O. Z., 2000
Hal tersebut dilakukan terus menerus secara bergantian sehingga
total sel MAT yang dihasilkan (baris maupun kolom) sesuai dengan total
sel MAT yang digunakan.
Tabel 2. 21 MAT pada Masa Mendatang dengan Metode Furness (hasil pengulanagn ke – 6)
Zona 1 2 3 4 oi Oi Ei
1 16 68 75 141 300 300 1
2 82 15 61 92 250 250 1
3 40 188 12 180 421 420 0.999
4 282 164 102 102 649 650 1.001
dd 420 435 250 515 1620
Dd 420 435 250 515 1620
Ed 1 1 1 1 1
Sumber: Tamin, O. Z., 2000
B.2. Metode Sintetis
Metode ini dilakukan dengan membentuk suatu permodelan yang
menggambarkan hubungan antarpola bangkitan dan tarikan lalu lintas,
kemudian diproyeksikan untuk memperoleh pergerakan pada masa yang
II-28 Metode sintetis (interaksi spasial) yang paling terkenal dan sering
digunakan adalah metode gravity (GR) karena sangat sederhana sehingga
mudah dimengerti dan digunakan. Model ini menggunakan konsep
gravity yang diperkenalkan oleh Newton pada tahun 1686 yang
dikembangkan dari analogi hukum gravitasi. Dalam bentuk matematis
model ini dinyatakan dalam persamaan:
Tid = Ai . Oi . Bd . Dd . f (Cid) ... 2- 19
Dimana:
Tid = pergerakan antar zona
Ai , Bd = konstanta faktor penyeimbang
Oi = pergerakan yang berasal dari zona ke – i
Dd = pergerakan yang menuju ke zona ke – d
f (Cid) = fungsi hambatan yang dianggap sebagai ukuran
aksesibilitas (fungsi jarak)
Ai = dan Bd =
(Tamin, O. Z., 2000)
Hal yang penting untuk diketahui adalah fid harus dianggap sebagai
ukuran aksesibilitas (kemudahan) antara zona i dengan zona d. Hyman
(1969) menyarankan tiga jenis fungsi hambatan yang dapat digunakan
dalam model GR:
, fungsi pangkat
, fungsi eksponensial - negatif
II-29 B.2.1. Model UCGR
Pada model ini sedikitnya mempunyai satu batasan, yaitu total
pergerakan yang dihasilkan harus sama dengan total pergerakan yang
diperkirakan dari tahap bangkitan pergerakan. Model ini bersifat tanpa –
batasan, dalam arti bahwa model tidak diharuskan menghasilkan total yang
sama dengan total pergerakan dari dan ke setiap zona yang diperkirakan
oleh tahap bangitan pergerakan. Model tersebut dapat dituliskan sebagai
berikut:
Tid = Ai . Oi . Bd . Dd . f (Cid) ... 2- 20
Dimana:
Ai = 1, untuk seluruh i
Bd = 1, untuk seluruh d
(Tamin, O. Z., 2000)
Tabel 2. 22 Bangkitan dan Tarikan Pergerakan pada Setiap Zona
Zona 1 2 3 4 Oi
1 200
2 300
3 350
4 150
Dd 300 200 150 350 1000
Sumber: Tamin, O. Z., 2000
Selain itu, terdapat juga informasi mengenai aksebilitas antar zona
yang dapat berubah jarak, waktu tempuh dan biaya perjalanan antar zona
II-30
Dengan menganggap fungsi hambatan mengikuti fungsi eksponensial – negatif, didapatkan matriks exp (-βCid) seperti terlihat pada
tabel berikut, dengan menganggap nilai β = 0.095.
Tabel 2. 24 Matriks exp (-βCid)
Zona 1 2 3 4
1 0.621145 0.148858 0.035674 0.008549 2 0.239651 0.385821 0.008549 0.092462 3 0.00531 0.092462 0.385821 0.057433 4 0.092462 0.239651 0.013764 0.621145
Sumber: Tamin, O. Z., 2000
Dengan menggunakan persamaan model UCGR, maka didapatkan
matriks sebagai berikut:
Tabel 2. 25 MAT Akhir Hasil Model UCGR
Zona 1 2 3 4 oi Oi Ei Ai
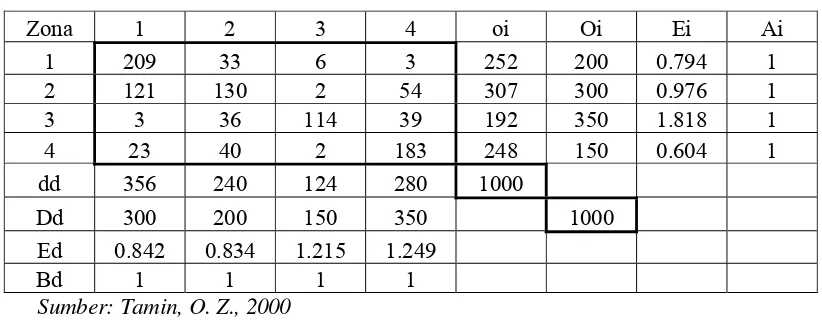
B.2.2. Model PCGR
Dalam model ini, total pergerakan global hasil bangkitan
II-31 pemodelan. Begitu juga, bangkitan pergerakan yang dihasilkan model
harus sama dengan hasil bangkitan pergerakan yang didiinginkan. Akan
tetapi, tarikan pergerakn tidak perlu sama. Sehingga syarat batas yang
dipergunakan adalah sebagai berikut:
Bd = 1untuk seluruh d danAi = untuk seluruh i
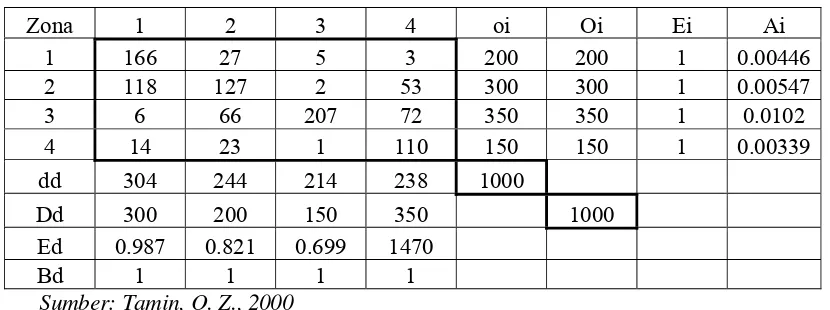
Tabel 2. 26 MAT Akhir Hasil Model PCGR
Zona 1 2 3 4 oi Oi Ei Ai
1 166 27 5 3 200 200 1 0.00446
2 118 127 2 53 300 300 1 0.00547
3 6 66 207 72 350 350 1 0.0102
4 14 23 1 110 150 150 1 0.00339
dd 304 244 214 238 1000
Dd 300 200 150 350 1000
Ed 0.987 0.821 0.699 1470
Bd 1 1 1 1
Sumber: Tamin, O. Z., 2000
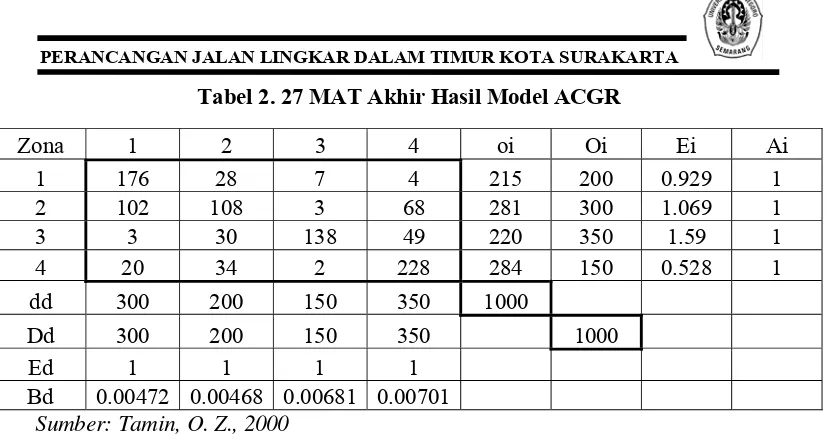
B.2.3. Model ACGR
Dalam model ini, total pergerakan secara global harus sama dan
juga tarikan pergerakan yang didapat dengan pemodelan harus sama
dengan hasil tarikan pergerakan yang diinginkan. Sebaliknya, bangkitan
pergerakan yang didapat dengan pemodelan tidak harus sama. Sehingga
syarat batas yang digunakan adalah sebagai berikut:
Ai = 1 untuk seluruh i dan Bd = untuk seluruh d
II-32 Tabel 2. 27 MAT Akhir Hasil Model ACGR
Zona 1 2 3 4 oi Oi Ei Ai
1 176 28 7 4 215 200 0.929 1
2 102 108 3 68 281 300 1.069 1
3 3 30 138 49 220 350 1.59 1
4 20 34 2 228 284 150 0.528 1
dd 300 200 150 350 1000
Dd 300 200 150 350 1000
Ed 1 1 1 1
Bd 0.00472 0.00468 0.00681 0.00701
Sumber: Tamin, O. Z., 2000
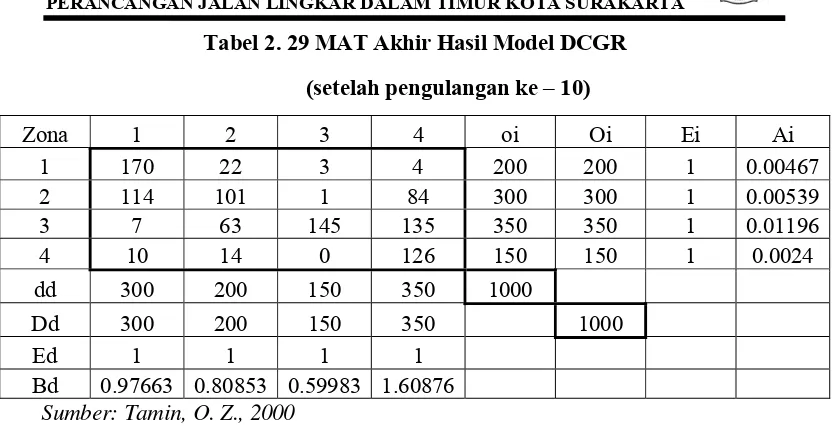
B.2.4. Model DCGR
Dalam model ini, bangkitan dan tarikan pergerakan harus selalu sama dengan yang dihasilkan oleh tahap bangkitan pergerakan. Sehingga syarat batasnya adalah sebagai berikut:
Ai = , untuk seluruh nilai i
Bd = , untuk seluruh nilai d
(Tamin, O. Z., 2000)
Tabel 2. 28 Nilai Ai dan Bd yang didapat pada Setiap Pengulangan
Pengulangan A1 A2 A3 A4 B1 B2 B3 B4 Pengulangan
1 0.00446 0.00547 0.0102 0.00339 1 1 1 1 0
3 0.00462 0.00547 0.01152 0.00258 0.98725 0.82103 0.69935 1.47032 2 5 0.00467 0.00542 0.01186 0.00243 0.97645 0.80892 0.62177 1.58355 4 7 0.00468 0.0054 0.01194 0.0024 0.97532 0.80843 0.60477 1.60505 6 9 0.00467 0.00539 0.01196 0.0024 0.97599 0.80849 0.60088 1.60844 8 11 selesai selesai selesai selesai 0.97663 0.80853 0.59983 1.60876 10
II-33 Tabel 2. 29 MAT Akhir Hasil Model DCGR
(setelah pengulangan ke – 10)
Zona 1 2 3 4 oi Oi Ei Ai
1 170 22 3 4 200 200 1 0.00467
2 114 101 1 84 300 300 1 0.00539
3 7 63 145 135 350 350 1 0.01196
4 10 14 0 126 150 150 1 0.0024
dd 300 200 150 350 1000
Dd 300 200 150 350 1000
Ed 1 1 1 1
Bd 0.97663 0.80853 0.59983 1.60876
Sumber: Tamin, O. Z., 2000
2.4. Karakteristik Jalan 2.4.1. Klasifikasi Jalan
Klasifikasi fungsional seperti dijabarkan dalam Undang – Undang
Republik Indonesia No. 38 Tahun 2004 Tentang Jalan Pasal 7 dan 8,
(Standar Perencanaan Geometrik Jalan Perkotaan, 1992) dibagi dalam dua
sistem jaringan yaitu:
1. Sistem jaringan jalan primer
Sistem jaringan jalan primer disusun mengikuti ketentuan peraturan
tata ruang dan struktur pembangunan wilayah tingkat nasional,
yang menghubungkan simpul - simpul jasa distribusi sebagai
berikut:
- Dalam kesatuan wilayah pembangunan menghubungkan
secara menerus kota jenjang ke satu, kota jenjang kedua, kota
jenjang ketiga, dan kota jenjang dibawahnya.
- Menghubungkan kota jejang kesatu dengan kota jenjang
II-34 Fungsi jalan dalam sistem jaringan primer dibedakan sebagai
berikut:
a. Jalan Arteri Primer
Jalan arteri primer menghubungkan kota jenjang kesatu
yang terletak berdampingan atau menghubungkan kota
jenjang kesatu dengan kota jenjang kedua.
Persyaratan jalan arteri primer adalah:
- Kecepatan rencana minimal 60 km/jam
- Lebar jalan minimal 8 meter
- Kapasitas lebih besar dari volume lalu lintas rata – rata
- Lalu lintas jarak jauh tidak boleh terganggu oleh lalu
lintas ulang alik, lalu lintas lokal dan kegiatan lokal
- Jalan masuk dibatasi secara efisien
- Persyaratan teknis jalan masuk ditetapkan oleh mentri
b. Jalan Kolektor Primer
Jalan kolektor primer menghubungkan kota jenjang kedua
dengan kota jenjang kedua atau menghubungkan kota
jenjang kedua dengan kota jenjang ketiga.
Persyaratan jalan kolektor primer adalah:
- Kecepatan rencana minimal 40 km/jam
- Lebar jalan minimal 7 meter
- Kapasitas sama dengan atau lebih besar daripada
volume lalu lintas rata –rata.
- Jalan masuk dibatasi, direncanakan sehingga tidak
mengurangi kecepatan rencana dan kapasitas jalan.
- Tidak terputus walaupn memasuki kota.
c. Jalan Lokal Primer
Jalan lokal primer menghubungkan kota jenjang kesatu
dengan persil atau menghubungkan kota jenjang kedua
II-35 dengan dibawahnya, kota jenjang ketiga dengan persil atau
dibawah kota jenjang ketiga sampai persil.
Persyaratan jalan lokal primer adalah:
- Kecepatan rencana minimal 20 km/jam
- Lebar jalan minimal 6 meter
- Tidak terputus walaupun melewati desa
2. Sistem jaringan jalan sekunder
Sistem jaringan jalan sekunder disusun mengikuti ketentuan tata
ruang kota yang menghubungkan kawasan – kawasan yang
mempunyai fungsi primer, fungsi sekunder kesatu, fungsi sekunder
kedua, dan seterusnya sampai perumahan.
Fungsi jalan dalam sistem jaringan jalan sekunder dibedakan
sebagai berikut:
a. Jalan Arteri Sekunder
Jalan arteri sekunder menghubungkan kawasan primer
dengan kawasan sekunder kesatu atau menghubungkan
kawasan sekunder kesatu dengan kawasan sekunder kesatu
atau kawasan sekunder kesatu dengan kawasan sekunder
kedua.
Berikut persyaratan jalan arteri sekunder:
- Kecepatan rencana minimal 30 km/jam
- Lebar badan minimal 8 meter
- Kapasitas sama atau lebih besar dari volume lalu lintas
rata – rata
- Lalu lintas cepat tidak boleh terganggu lalu lintas lambat
- Persimpangan dengan pengaturan tertentu, tidak
II-36 b. Jalan Kolektor Sekunder
Jalan kolektor sekunder menghubungkan kawasan sekunder
kedua dengan kawasan sekunder kedua atau kawasan
sekunder kedua dengan kawsan sekunder ketiga.
Berikut persyaratan jalan kolektor sekunder:
- Kecepatan minimum 20 km/jam
- Lebar badan jalan minimal 7 meter
c. Jalan Lokal Sekunder
Jalan lokal sekunder menghubungkan kawasan sekunder
kesatu dengan perumahan, kawasan sekunder kedua dengan
perumahan, menghubungkan kawasan sekunder ketiga
dengan kawasan perumahan dan seterusnya.
Berikut persyaratan jalan lokal sekunder:
- Kecepatan rencana minimal 10 km/jam
- Lebar badan jalan minimal 5 meter
- Persyaratan teknik diperuntukkan bagi kendaraan beroda
tiga atau lebih
- Lebar badan jalan tidak diperuntukkan bagi kendaraan
beroda tiga atau lebih, minimal 3,5 meter. (Sumber:
Standar Perencanaan Geometrik Jalan Perkotaan, 1992)
Tabel 2. 30 Penentuan Lebar Jalur dan Bahu Jalan
VLHR (smp/hari)
Arteri Kolektor Lokal
Ideal Minimum Ideal Minimum Ideal Minimum
Lebar
II-37 2.4.2. Tipe Jalan
Tipe jalan ditentukan sebagai jumlah lajur dan arah pada suatu ruas
jalan dimana masing – masing memiliki karakteristik geometrik jalan yang
digunakan untuk menentukan kecepatan arus bebas dan kapasitas jalan
sebagai berikut:
1. Jalan Satu Arah (1 – 3/1)
-Lebar jalan 7 meter
-Lebar bahu paling sedikit 2 m pada setiap sisi
-Tanpa median
-Hambatan samping rendah
-Ukuran kota 1 – 3 juta penduduk
-Digunakan pada alinyemen datar
2. Jalan Dua Lajur – Dua Arah (2/2 UD)
-Lebar jalan 7 meter
-Lebar bahu paling sedikit 2 meter pada setiap sisi
-Tanpa median
-Pemisah arus lalu lintas adalah 50 – 50
-Hambatan samping rendah
-Ukuran kota 1 – 3 juta penduduk
-Digunakan untuk alinyemen datar
3. Jalan Empat Lajur – Dua Arah (4/2)
a. Tanpa Median (Undevided)
- Lebar lajur 3,5 meter (lebar lajur lalu lintas total 14 meter)
- Jarak antara kerb dan penghalang terdekat pada trotoar ≥ 2
meter dari rintangan jalan
- Tanpa median
- Pemisah arus lalu lintas adalah 50 – 50
- Hambatan samping rendah
- Ukuran kota 1 – 3 juta penduduk
II-38 b. Dengan Median (Devided)
- Lebar lajur 3,5 meter (lebar lajur lalu lintas total 14 meter)
- Jarak antara kerb dan penghalang terdekat pada trotoar ≥ 2
meter dari rintangan jalan
- Dengan median
- Pemisah arus lalu lintas adalah 50 – 50
- Hambatan samping rendah
- Ukuran kota 1 – 3 juta penduduk
- Digunakan pada alinyemen datar
4. Jalan Enam Lajur – Dua Arah dengan Median (6/2 D)
-Lebar lajur 3,5 meter (lebar lajur lalu lintas total 21 meter)
-Kerb (tanpa bahu)
-Jarak antar penghalang terdekat pada trotoar ≥ 2 meter
-Median pemisah arus lalu lintas adalah 50 – 50
Sumber: Manual Kapasitas Jalan Indonesia, 1997
2.5. Aspek Geometrik Jalan 2.5.1. Alinyemen Horizontal
Merupakan proyeksi sumbu jalan tegak lurus bidang horizontal yang
terdiri dari susunan lurus (tangen) dan garis lengkung (busur, lingkaran,
spiral). Bagian lengkung merupakan bagian yang perlu mendapat perhatian,
karena pada bagian tersebut dapat terjadi gaya sentrifugal yang cenderung
dapat melemparkan kendaraan keluar jalan. Hal-hal yang perlu diperhatikan
dalam perencanaan tikungan pada alinyemen horizontal adalah:
1) Superelevasi (e)
Superelevasi adalah suatu kemiringan melintang di tikungan yang
berfungsi mengimbangi gaya sentrifugal yang diterima kendaraan pada saat
II-39 2) Jari-Jari Tikungan
Jari-jari tikungan minimum (Rmin) ditetapkan sebagai berikut:
Rmin =
Rmin = jari-jari tikungan minimum (m)
R
3) Lengkung Peralihan
Lengkung peralihan adalah lengkung transisi pada alinyemen
horizontal dan sebagai pengantar dari kondisi lurus ke lengkung penuh secara
berangsur-angsur. Pada lengkung peralihan, perubahan kecepatan dapat
terjadi secara berangsur-angsur serta memberikan kemungkinan untuk
mengatur pencapaian kemiringan (perubahan kemiringan melintang secara
berangsur-angsur).
2.5.2. Jenis Tikungan pada Perencanaan Alinyemen Horizontal
Terdapat 3 jenis tikungan pada perencanaan alinyemen horizontal,
yaitu Full Circle (FC), Spiral-Circle-Spiral (SCS) dan Spiral-Spiral (SS).
II-40
Ls fiktif (Ls') Ls fiktif (Ls')
POTONGAN 1
SISI LUAR SISI DALAM
∆
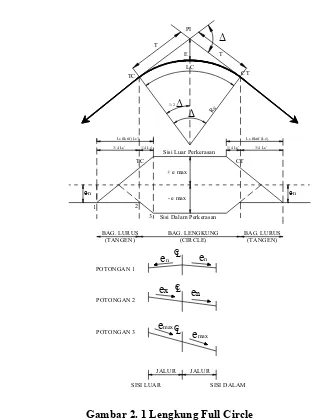
Gambar 2. 1 Lengkung Full Circle Keterangan :
Rc = jari-jari lingkaran (m)
PI = titik perpotongan tangen
TC/CT = Tangent Circle / Circle Tangent
T = jarak antara TC dan PI atau PI dan CT (m)
II-41 Lc = panjang bagian lengkung circle
E = jarak PI ke lengkung circle
Rumus yang digunakan :
T = Rc . tan 1/2∆ ... 2- 22
E = Rc . tan 1/4∆ ... 2- 23
E = (R2 +T2) - Rc ... 2- 24
E = R .(sec 1/2∆ – 1) ... 2- 25
Lc = 0,01745 ∆ . Rc ... 2- 26
Lt = Lc ... 2- 27
Jenis tikungan ini dapat digunakan pada tikungan dengan jari - jari
besar dan sudut tangen (∆) relatif kecil. Pada umumnya tipe tikungan ini
dipakai pada daerah dataran, tetapi juga tergantung pada besarnya kecepatan
II-42
SISI LUAR SISI DALAM
Xc
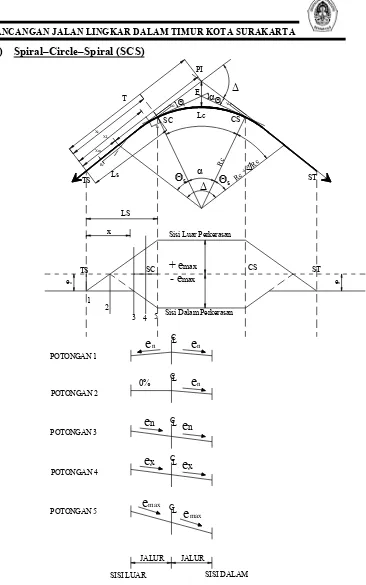
2) Spiral–Circle–Spiral (SCS)
II-43 Keterangan :
PI = titik perpotongan tangen
TS = titik perubahan dari tangen ke spiral
SC = titik perubahan dari spiral ke circle
CS = titik perubahan dari circle ke spiral
Rc = jari-jari lengkung lingkaran
Lc = panjang busur lingkaran
Ls = panjang busur spiral
T = panjang tangen utama
E = panjang eksternal total dari PI ke tengah busur lingkaran
∆Rc = jarak dari busur lingkaran tergeser terhadap jarak tengah
Xm = jarak dari TS ke titik proyeksi pusat lingkaran pada tangen
∆Rc = sudut pertemuan antara tangen utama
θs = sudut spiral
θsi = sudut spiral ke titik sembarang pada spiral
XC,YC = koordinat SC atau CS terhadap TS – PI atau PI – TS
Rumus yang digunakan :
II-44
Untuk lengkung S-C-S sebaiknya Lc ≥ 20m
Lt = Lc + 2 Ls ... 2- 38
Pada tikungan jenis ini, dari arah tangen ke arah circle memiliki spiral yang merupakan transisi dari bagian luar kebagian circle. Adanya lengkung spiral adalah lengkung transisi pada alinyemen horizontal.
Lengkung spiral sebagai pengantar dari kondisi lurus ke lengkung penuh
secara berangsur-angsur. Pada bagian ini terjadi gaya sentrifugal dari 0
sampai dengan maksimum ketika kendaraan memasuki dan meninggalkan
II-45
SISI LUAR SISI DALAM
+ e max
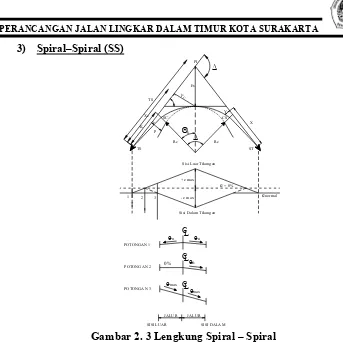
3) Spiral–Spiral (SS)
Gambar 2. 3 Lengkung Spiral – Spiral
“Seluruh notasi adalah seperti yang telah dijelaskan pada sub bab SCS”
Rumus yang digunakan :
∆Rc= 0 →∆ = 2θs ... 2- 40
Jenis tikungan Spiral-Spiral digunakan pada tikungan tajam dengan
sudut tangen (∆) yang sangat besar. Pada Spiral-Spiral, dimana Lc = 0,
merupakan tikungan yang kurang baik. Sebab tidak ada jarak tertentu dalam
II-46
berbentuk Spiral-Spiral, prinsipnya hampir sama dengan tipe
Spiral-Circle-Spiral, hanya di sini tidak digunakan lengkung Circle, Lc=0 hingga Lt = 2Ls.
2.5.3. PelebaranPerkerasan Pada Lengkung Horizontal
Kendaraan yang bergerak dari jalan lurus menuju tikungan, seringkali
tak dapat mempertahankan lintasannya pada lajur yang disediakan. Hal ini
disebabkan karena :
1. Pada waktu membelok yang memberi tanda belokan pertama kali
hanya roda depan, sehingga lintasan roda belakang agak keluar lajur
(Off Tracking).
2. Jejak lintasan kendaraan tidak lagi berhimpit, karena bemper depan
dan belakang kendaraan akan mempunyai lintasan yang berbeda
dengan lintasan roda depan dan roda belakang kendaraan.
3. Pengemudi akan mengalami kesukaran dalam mempertahankan
lintasannya tetap pada lajur jalannya terutama pada
tikungan-tikungan tajam atau pada kecepatan yang tinggi.
Untuk menghindari hal itu maka pada tikungan-tikungan yang tajam
perkerasan jalan perlu diperlebar. Pelebaran perkerasan ini merupakan faktor
dari jari-jari lengkung, kecepatan kendaraan, jenis dan ukuran kendaraan
rencana yang dipergunakan sebagai dasar perencanaan.
Pada umumnya truk tunggal digunakan sebagai jenis kendaraan dasar
penentuan tambahan lebar perkerasan yang dibutuhkan. Tetapi pada
jalan-jalan dimana banyak dilewati kendaraan berat, jenis kendaraan semi trailer
merupakan kendaraan yang cocok dipilih untuk kendaraan rencana.
Elemen-elemen dari pelebaran perkerasan tikungan terdiri dari:
1. Off Tracking
Untuk perencanaan geometrik jalan antar kota, Bina Marga
II-47
pada saat roda depan kendaraan pertama kali dibelokkan dan tinjauan
dilakukan pada lajur sebelah dalam.
Rumus :
B = RW – Ri ... 2- 45
Ri + b = (Rw2- (p+A)2 ... 2- 46
Rw = (Ri+b)2+(p+A)2 ... 2- 47
Ri = Rw – B ... 2- 48
Rw – B + b = (Rw2- (p+A)2 ... 2- 49 B = Rw + b - (Rw2- (p+A)2. ... 2- 50
Keterangan :
B = Lebar kendaraan rencana
B = Lebar perkerasan yang ditempati satu kendaraan di
tikungan pada lajur sebelah dalam
Rw = Radius lengkung terluar dari lintasan kendaraan pada
lengkung horizontal untuk lajur sebelah dalam.
Besarnya Rw dipengaruhi oleh tonjolan depan ( A )
kendaraan dan sudut belokan roda depan ( α ).
Ri = Radius lengkung terdalam dari lintasan kendaraan pada
lengkung horizontal untuk lajur sebelah dalam. Besarnya Ri
dipengaruhi oleh jarak gandar kendaraan ( p ).
Rc = Radius lajur sebelah dalam – 0,5 lebar perkerasan + 0,5b
II-48 Ri = (Rw2- (p+A)2- 0,5b ... 2- 54
2. Kesukaran Dalam Mengemudi di Tikungan
Semakin tinggi kecepatan kendaraan dan semakin tajam tikungan tersebut,
semakin besar tambahan pelebaran akibat kesukaran dalam mengemudi.
Hal ini disebabkan oleh karena kecenderungan terlemparnya kendaran ke
arah luar dalam gerakan menikung tersebut.
Z = 0,105 V/R ... 2- 55
Keterangan :
V = Kecepatan (Km/jam)
R = Radius lengkung (m)
Kebebasan samping di kiri dan kanan jalan tetap harus dipertahankan demi
keamanan dan tingkat pelayanan jalan. Kebebasan samping (C) sebesar 0,5
m , 1 m, dan 1,25 m cukup memadai untuk jalan dengan lebar lajur 6 m, 7
m, dan 7,50 m.
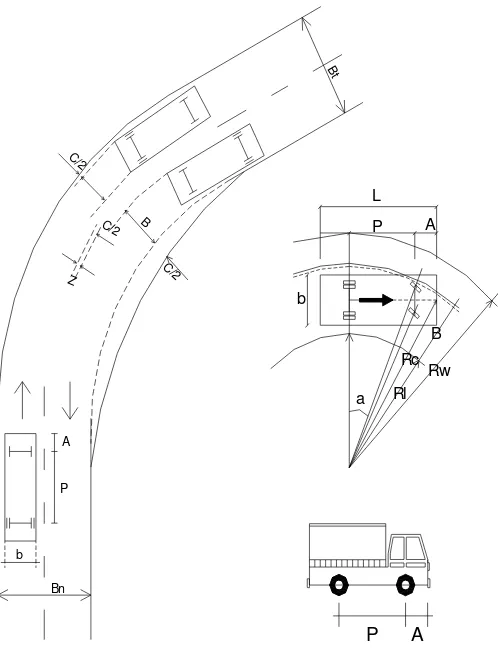
Pada Gambar 2.4 berikut ini dapat dilihat pelebaran perkerasan pada
tikungan:
II-49
Rc
Rl B
Rw a
A P L
b
P A
Bn b
P A
Bt
B
C/2 C/
2
C/2
Z
Gambar 2. 4 Pelebaran Perkerasan Pada Tikungan
Keterangan :
b = lebar kendaraan rencana
B = lebar perkerasan yang ditempati suatu kendaraan di tikungan
pada lajur sebelah dalam
U = B – b
C = lebar kebebasan samping di kiri dan kanan kendaraan
Z = lebar tambahan akibat kesukaran mengemudi di tikungan
II-50
Bt = lebar total perkerasan di tikungan = n (B + C ) +Z
n = jumlah lajur
∆b = tambahan lebar perkerasan di tikungan = Bt – Bn
2.5.4. Kemiringan Melintang Pada Jalan
Diagram ini merupakan cara untuk menggambarkan pencapaian
superelevasi dari kemiringan normal sampai dengan kemiringan maksimal.
Pada jalan dengan lebar kemiringan badan jalan (e) sebesar 2% merupakan
kemiringan minimum, sedangkan kemiringan maksimumnya 10%. Syarat
agar konstruksi aman adalah bila (emax + fm) yang lebih besar dari (emax yang
didapat dari lapangan). Besarnya fm ini didapat dari grafik koefisien gesekan
melintang sesuai dengan AASHTO 1993.
Rumus :
emax + fm = V² / (127 x R) ... 2- 56
Keterangan :
emax = kemiringan melintang jalan (%)
fm = koefisien gesekan melintang
V = kecepatan rencana (km/jam)
R = jari-jari tikungan (m)
Persyaratan kemiringan jalan maksimal dengan pertimbangan
kenyamanan, keamanan, komposisi kendaraan dan variasi kecepatan serta
efektifitas kerja dari alat-alat berat pada kemiringan jalan dapat dibagi atas :
1) Untuk jalan rural/ luar kota, maksimum adalah 10%
II-51 2.5.5. Alinyemen Vertikal
Alinyemen vertikal adalah garis vertikal yang dibentuk oleh bidang
vertikal melalui sumbu jalan. Alinyemen vertikal menyatakan bentuk
geometri jalan dalam arah vertikal. Dalam perencanaan alinyemen vertikal,
biasanya setelah diketahui elevasi dan STA, PVI (Point of Vertical Intersection), kemudian baru dihitungbesaran-besaran sebagai berikut :
1) Panjang PLV (Peralihan Lengkung Vertikal)/ lengkung vertikal (m)
2) Pergeseran permukaan jalan di bawah atau di atas PPV (Pusat
Perpotongan Vertikal)
3) Pergeseran vertikal (E) dalam (m)
4) Elevasi dan Stasioning dari PLV dan PTV (Peralihan Tangen Vertikal)
5) Elevasi permukaan jalan antara PLV, PPV dan PTV pada setiap
stasioning yang terdapat pada setiap alinyemen
Rumus yang digunakan :
∆ = g1 - g2 ... 2- 57
Keterangan :
∆ = perbedaan aljabar landai
g1, g2 = kelandaian jalan (%)
Jarak antara lengkung vertikal dengan PPV (E) :
E =
800 .L ∆
... 2- 58
Keterangan :
E = jarak antara lengkung vertikal dengan PPV (m)
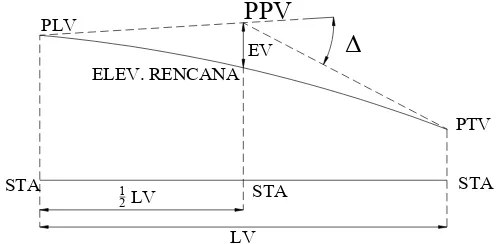
II-52 2.5.5.1. Alinyemen Vertikal Cembung
Alinyemen vertikal cembung terjadi jika terdapat perbedaan
kemiringan dari kemiringan yang lebih besar menuju ke kemiringan yang
lebih kecil. Dalam perencanaan alinyemen vertikal cembung dapat ditinjau
terhadap jarak pandang henti dan syarat drainase. Dimana panjang
alinyemen vertikal cembung dapat dikatakan memenuhi syarat, apabila
kebebasan pandang henti untuk kecepatan rencana dapat dipenuhi. Gambar
alinyemen vertikal cembung dapat dilihat pada Gambar 2.5.
Gambar 2. 5 Alinyemen Vertikal Cembung
Pandangan bebas lengkung vertikal cembung jika S < L :
L =
L = panjang minimum lengkung vertikal cembung (m)
II-53
∆
PLVPTV EV
STA STA
STA 1
2 LV
LV
ELEV. RENCANA
PPV
∆ = beda aljabar untuk kelandaian = g1 - g2(%)
h1 = tinggi mata terhadap permukaan jalan = 1,25 m
h2 = tinggi benda objek terhadap permukaan jalan
1,25 m untuk jarak pandang menyiap
0,10 m untuk jarak pandang henti
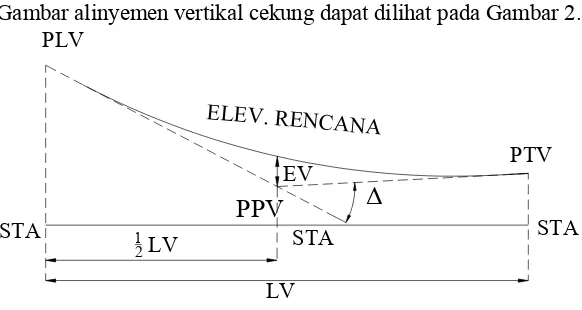
2.5.5.2. Alinyemen Vertikal Cekung
Gambar alinyemen vertikal cekung dapat dilihat pada Gambar 2.6.
Gambar 2. 6 Alinyemen Vertikal Cekung
Alinyemen vertikal cekung terjadi jika terdapat perbedaan
kemiringan dari kemiringan yang lebih kecil menuju ke kemiringan yang
lebih besar. Peninjauan panjang alinyemen vertikal cekung minimum
berdasarkan pada jarak pandang waktu malam hari atau jarak yang dapat
dijangkau oleh lampu besar. Disamping itu memperhatikan juga faktor
kenyamanan, dimana perhitungan rumus berdasarkan pada pengaruh gaya
berat oleh gaya sentripetal maksimum yang diperbolehkan. Besarnya
percepatan sentripetal maksimum yang timbul adalah = 0,3 m/det2 sebagai
syarat keamanan.
1) Rumus berdasarkan penyinaran lampu besar :
II-54
2) Rumus berdasarkan kenyamanan :
L =
L = panjang minimal lengkung vertikal cekung (m)
∆ = beda aljabar kedua tangen = g1 - g2(%)
V = kecepatan rencana landai maksimum (km/jam)
S = jarak pandang (m)
2.5.5.3. Landai Maksimum Jalan
Kelandaian maksimum dimaksudkan untuk memungkinkan
kendaraan bergerak terus tanpa kehilangan kecepatan yang berarti.
Kelandaian maksimum didasarkan pada kecepatan truk yang bermuatan
penuh yang mampu bergerak dengan penurunan kecepatan tidak lebih dari
separuh kecepatan semula tanpa menggunakan gigi rendah. Kelandaian
maksimum untuk berbagai VR, dapat dilihat pada Tabel 2.31:
Tabel 2. 31 Kelandaian Maksimum Yang Diijinkan
VR(km/jam) 120 110 100 80 60 50 40 < 40
Kelandaian Maksimal (%) 3 3 4 5 8 9 10 10
Sumber : Tata Cara Perencanaan Geometri Jalan Antar Kota, 1997
Panjang kritis yaitu panjang landai maksimum yang harus disediakan
II-55
kecepatan tidak lebih dari separuh VR. lama perjalanan tersebut ditetapkan
tidak lebih dari 1 menit panjang kritis yang ditetapkan dapat dilihat pada
Tabel 2.32
Tabel 2. 32 Panjang Kritis (m) Kecepatan Pada Awal
Tanjakan (Km/Jam)
Kelandaian (%)
4 5 6 7 8 9 10
80 630 460 360 270 230 230 200
60 320 210 160 120 110 90 80
Sumber : Tata Cara Perencanaan Geometri Jalan Antar Kota, 1997
2.5.6. Penampang Melintang Jalan
Penampang melintang jalan merupakan potongan tegak lurus sumbu
jalan. Pada potongan melintang jalan dapat dilihat bagian-bagian jalan.
Bagian-bagian jalan dapat dikelompokkan sebagai berikut :
2.5.6.1. Jalur Lalu Lintas
Jalur adalah bagian jalan yang dipergunakan untuk lalu lintas
kendaraan yang secara fisik berupa perkerasan jalan. Jalur lalu lintas dapat
terdiri dari beberapa lajur dan tipe :
• 1 jalur – 2 lajur – 2 arah (2/2 UD)
• 1 jalur – 2 lajur – 1 arah (2/1 UD)
• 2 jalur – 4 lajur – 2 arah (4/2 D)
Keterangan : UD = Tidak Terbagi ; D = Terbagi
2.5.6.2. Lajur Lalu Lintas
Lajur adalah bagian jalur lalu lintas yang memanjang dibatasi oleh
marka. Lajur jalan memiliki lebar yang cukup untuk dilewati oleh suatu
kendaraan bermotor sesuai dengan kendaraan rencana. Lebar lajur
tergantung pada kecepatan dan kendaraan rencana, dinyatakan dalam fungsi
II-56 Tabel 2. 33 Lebar Lajur Ideal
Fungsi Kelas Lebar Lajur Ideal (m)
Arteri I
II, IIIA
3,75 3,5
Kolektor IIIA, IIIB 3
Lokal IIIC 3
Sumber : Tata Cara Perencanaan Geometri Jalan Antar Kota, 1997
2.5.6.3. Bahu Jalan
Bahu jalan adalah bagian jalan yang terletak pada tepi jalur lalu
lintas dan harus diperkeras, yang mempunyai fungsi sebagai lajur lalu lintas
darurat, tempat berhenti sementara, ruang bebas samping bagi lalu lintas dan
penyangga kestabilan perkerasan jalur lalu lintas. Kemiringan bahu jalan
normal antara 2% - 5%.
2.5.6.4. Median
Median adalah bagian bangunan jalan yang secara fisik
Memisahkan 2 Jalur Lalu Lintas Yang Berlawanan Arah.
2.6. Aspek Perkerasan Jalan
Perkerasan jalan raya adalah bagian dari jalan raya yang diperkeras dengan
lapisan konstruksi tertentu, yang berfungsi :
1) Menyebarkan beban lalu lintas sehingga besarnya beban yang
dipikul subgrade lebih kecil dari daya dukung subgrade itu sendiri.
2) Menyalurkan air hujan ke samping, sehingga subgrade dapat
terlindung.
3) Mendapatkan permukaan yang rata sehingga kenyamanan dalam
perjalanan akan diperoleh.
II-57
bahan campuran beraspal sebagai lapisan permukaan serta bahan berbutir pada
lapisan bawah. Struktur perkerasan lentur terdiri atas :
1) Lapis permukaan (Surface Course)
Fungsi lapis permukaan ini adalah :
a) Sebagai bahan perkerasan yang mempunyai kualitas material jauh di
atas kualitas material yang berada di bawahnya sehingga dapat
memikul sebagian besar beban lalu lintas untuk melindungi lapisan di
bawahnya yang lebih rentang terhadap kerusakan akibat beban lalu
lintas.
b) Sebagai lapis kedap air untuk melindungi badan jalan dari kerusakan
akibat cuaca
2) Lapis pondasi (Base Course)
Fungsi lapis pondasi ini adalah :
a) Menahan beban roda dan menyebarkan ke lapisan di bawahnya
b) Sebagai lantai kerja bagi lapis permukaan
c) Sebagai lapis peresapan untuk pondasi di bawahnya
3) Lapis pondasi bawah (Sub Base Course)
Fungsi lapis pondasi bawah ini adalah :
a) Menahan dan menyebarkan beban roda ke tanah dasar
b) Mencapai efisiensi penggunaan material
c) Sebagai lapis pertama agar pelaksanaan dapat berjalan lancar
d) Mencegah agar tanah dasar tidak masuk ke dalam struktur
perkerasan
II-58
Tanah dasar adalah permukaan tanah asli atau permukaan galian/ timbunan
yang dipadatkan dan merupakan permukaan dasar untuk perletakan bagian jalan
lainnya. Pemadatan harus dilaksanakan secara baik agar tidak terjadi penurunan
yang tidak merata akibat beban lalu lintas. Lapis perkerasan lentur dapat dilihat
pada gambar 2.7. berikut ini:
TANAH D ASAR (SU B G R ADE) LAPIS PO ND ASI BAW AH (SU B BASE C O U RSE) LAPIS PO ND ASI ATAS (BASE C O U RSE) LAPIS PER M U KAAN (SU RFAC E C O UR SE)
Gambar 2. 7 Lapis Perkerasan Lentur 2.6.1. Menghitung Konstruksi Perkerasan Lentur
Penetuan tebal perkerasan lentur jalan didasarkan pada buku
“Petunjuk Perencanaan Tebal Perkerasan Lentur Jalan Raya Metode Analisa
Komponen SKBI 2.3.26.1987”.
Data-data yang dibutuhkan untuk perencanaan suatu perkerasan
lentur adalah:
a. Data LHR
b. CBR tanah dasar
c. Data untuk penentuan faktor regional
Dasar perhitungannya berdasar petunjuk buku di atas adalah
sebagai berikut :
1. Menentukan Faktor Regional (FR)
Faktor regional adalah faktor setempat yang menyangkut keadaan
II-59
dukung tanah dasar dan perkerasan. Dengan memakai parameter curah
hujan, kelandaian jalan dan prosentase kendaraan berat maka didapat nilai
FR.
2. Menghitung dan menampilkan jumlah komposisi lalu lintas harian
rata-rata LHR awal rencana.
3. Menghitung angka ekuivalen
Yaitu angka yang menyatakan jumlah lintasan sumbu tunggal seberat 8,16
ton pada jalur rencana yang diduga terjadi pada permulaan umur rencana.
Harga masing-masing kendaraan dihitung dengan memakai rumus :
• Angka ekuivalen sumbu tunggal E = (beban 1 sumbu tunggal / 8,16 )4
• Angka ekuivalen sumbu ganda
E = 0,086 ( beban 1 sumbu ganda / 8,16 )4
4. Menghitung lintas ekuivalen permulaan
Jumlah lintas ekuivalen harian rata-rata dari sumbu tunggal seberat 8,16
ton pada jalur rencana yang diduga terjadi pada permulaan umur rencana.
Rumus :
LEP = C x LHR awal x E ... 2- 64
Keterangan :
C = Koefisien distribusi kendaraan
LHR awal = Lalu lintas harian rata-rata pada awal umur rencana
E = Angka ekuivalen untuk setiap jenis kendaraan
II-60
Jumlah lintas ekuivalen harian rata-rata dari sumbu tunggal seberat 8,16
ton pada jalur rencana yang diduga terjadi pada akhir umur rencana.
Rumus :
LEA = C . LHRakhir . E ... 2- 65
Keterangan :
C = Koefisien distribusi kendaraan
LHRakhir = Lalu lintas harian rata-rata
E = Angka ekuivalen untuk setiap jenis kendaraan
6. Menghitung Lintas Ekuivalen Tengah
Jumlah lintas ekuivalen harian rata-rata dari sumbu tunggal seberat 8,16
ton pada jalur rencana yang diduga terjadi pada tengah rencana.
Rumus :
LET = ½ (LEA + LEP ) ... 2- 66
Keterangan :
LEA = Lintas Ekuivalen Akhir
LEP = Lintas Ekuivalen Permulaan
7. Menghitung Lintas Ekuivalen Rencana (LER)
Suatu besaran yang dipakai dalam nomogram penetapan tebal perkerasan
untuk menyatakan jumlah lintas ekuivalen rata-rata dari sumbu tunggal
seberat 8,16 ton pada jalur rencana.
Rumus :
LER = LET . (UR/10) ... 2- 67
II-61
Keterangan :
FP = Faktor penyesuaian
LET = Lintas Ekuivalen Tengah
UR = Umur Rencana
8. Menghitung daya dukung tanah dasar (DDT) dan CBR
Daya dukung tanah dasar (DDT) ditetapkan berdasarkan grafik korelasi.
Daya dukung tanah dasar diperoleh dari nilai CBR atau Plate Bearing Test,
DCP, dll. Seperti pada grafik korelasi CBR dengn DDT berikut ini:
Gambar 2. 8 Grafik Korelasi CBR dan DDT
Dari nilai CBR yang diperoleh ditentukan nilai CBR rencana yang
II-62
Caranya adalah sebagai berikut :
a. Tentukan harga CBR terendah.
b. Tentukan jumlah harga CBR nilai CBR.
c. Tentukan jumlah harga CBR yang sama atau lebih besar dari
masing-masing nilai CBR.
d. Tentukan CBR yang mewakili (CBR 90%) dengan grafik.
e. Untuk mendapatkan nilai DDT, dengan menggunakan grafik di atas
korelasikan nilai CBR yang mewakili atau dengan menggunakan
rumus sebagai berikut:
DDT = 4,3 log CBR + 1,7 ... 2- 68
9. Indeks Permukaan
Indeks Permukaan adalah nilai kerataan/ kehalusan serta kekokohan
permukaan yang bertalian dengan tingkat pelayanan bagi lalu lintas yang
lewat.
Dalam menentukan indeks permukaan awal umur rencana (IPo) perlu
diperhatikan jenis lapis permukaan jalan (kerataan/kehalusan serta
II-63 Tabel 2. 34 Indeks Permukaan Pada Awal Umur Rencana ( I Po )
Jenis Lapis Perkerasan IPo Roughness *) (Mm/Km)
LASTON ≥ 4
Sumber: Petunjuk Perencanaan Tebal Perkerasan Lentur Jalan Raya Dengan Metode Analisa Komponen, 1987
10. Menghitung Indeks Tebal Perkerasan (ITP)
Adalah angka yang berhubungan dengan penentuan tebal perkerasan,
caranya sebagai berikut:
a. Berdasarkan CBR tanah dasar, dari grafik didapat daya dukung tanah
dasar (DDT).
b. Dengan parameter klasifikasi jalan dan besarnya LER, dari Tabel 2.35
II-64 Tabel 2. 35 Permukaan Pada Akhir Umur Rencana ( IP )
LER*) Klasifikasi Jalan
Lokal Kolektor Arteri Tol
< 10 1,0 - 1,5 1,5 1,5 – 2,0 -
10 - 100 1,5 1,5 – 2,0 2 -
100 - 1000 1,5 - 2,0 2 2,0 – 2,5 -
> 1000 - 2,0 – 2,5 2,5 2,5
Sumber : Petunjuk Perencanaan Tebal Perkerasan Lentur Jalan Raya Dengan Metode Analisa Komponen, 1987
Tabel 2. 36 Faktor Regional
Curah Hujan
% Kelandaian Berat
≤ 30% > 30% ≤ 30% > 30% ≤ 30% > 30% Iklim I
< 900mm/Th 0,5 1,0-1,5 1 1,5-2,0 1,5 2,0-2,5
Iklim II
900mm/Th 1,5 2,0-2,5 2 2,5-3,0 2,5 3,0-3,5
Sumber : Petunjuk Perencanaan Tebal Perkerasan Lentur Jalan Raya Dengan Metode Analisa Komponen, 1987
Berdasarkan data-data yang diperoleh dari nomogram DDT, dan
tabel-tabel nilai IP, LER dan FR kemudian menetapkan tebal minimum dengan
menggunakan Tabel 2.37- 2.39 dan rumus sebagai berikut ini:
ITP = (a1 . D1) + (a2 . D2) + (a3 . D3) ... 2- 69
dimana :
a1,a2,a3 = koefisien kekuatan relatif bahan perkerasan
D1, D2, D3 = tebal minimum masing-masing perkerasan.
Nilai ITP dapat dicari dengan menggunakan Nomogram korelasi antara
nilai DDT, LER, FR dan ITP sebagaimana yang terdapat pada Gambar
II-65 Tabel 2. 37 Koefisien Kekuatan Relatif ( a )
Koefisien Kekuatan Relatif Kekuatan Bahan
Jenis Bahan
II-66
1. Lapis Permukaan
Tabel 2. 38 Batas-Batas Minimum Pada Lapis Permukaan
ITP Tebal
minimum Bahan
< 3,00 5 Lapis pelindung : (buras/burtu/burda)
3,00 – 6,70 5 Lapen / aspal macadam, HRA, lasbutag, laston
6,71 – 7,49 7,5 Lapen / aspal macadam, HRA, lasbutag, laston
7,50 – 9,99 7,5 Lasbutag, laston
≥ 10,00 10 Laston
Sumber : Petunjuk Perencanaan Tebal Perkerasan Lentur Jalan Raya Dengan Metode Analisa Komponen, 1987 2. Lapis Pondasi
Tabel 2. 39 Batas-Batas Minimum Pada Lapis Pondasi
ITP Tebal
minimum Bahan
< 3,00 15 Batu pecah, stabilitas tanah dengan semen,stabilitas tanah dengan kapur
3,00 – 7,49 20
10
Batu pecah, stabilitas tanah dengan semen, stabilitas tanah dengan kapur
Laston atas
7,50 – 9,99 20
15
Batu pecah, stabilitas tanah dengan semen, stabilitas tanah dengan kapur, pondasi macadam
Laston atas
10 – 12,14
20
Batu pecah, stabilitas tanah dengan semen, stabilitas tanah dengan kapur, pondasi macadam, lapen, laston atas
≥ 12,25 25
Batu pecah, stabilitas tanah dengan semen, stabilitas tanah dengan kapur, pondasi macadam, lapen, laston atas
Sumber : Petunjuk Perencanaan Tebal Perkerasan Lentur Jalan Raya Dengan Metode Analisa Komponen,
II-67
3. Lapis Pondasi Bawah
Pondasi bawah, tebal minimum Untuk setiap nilai ITP bila digunakan
adalah 10 cm.
Setelah diperoleh tebal minimum, kemudian dicari nilai ITP dengan
menggunakan Nomogram ITP sebagi berikut ini: