4
HASIL RANCANG BANGUN SISTIM DETEKSI
KAWANAN IKAN
4.1 Rancang
Bangun
Perangkat
Pendeteksi Kawanan Ikan
4.1.1 Diagram blok
Diagram blok dari perangkat pendeteksi jenis kawanan ikan dapat dilihat pada Gambar 36. Perangkat pendeteksi jenis kawanan ikan terdiri dari 5 unit yaitu:
1. Osilator (oscillator)
2. Penguat daya (power amplifier) 3. Penguat penerima (receiver)
4. Pendeteksi perubahan fase (phase shifted detector) 5. Penapis frekuensi rendah (low pass filter, LPF).
Gambar 36. Diagram blok perangkat pendeteksi jenis kawanan ikan.
4.1.2 Frekuensi yang digunakan
Rangkaian osilator membangkitkan gelombang pembawa kontinyu dengan frekuensi 200 kHz. Gelombang tersebut kemudian dikuatkan oleh rangkaian penguat daya agar diperoleh daya yang diinginkan serta impedansi yang sesuai dengan impedansi transducer pemancar yang digunakan. Melalui transducer tersebut, gelombang akustik yang keluar dari transducer dipancarkan ke arah gerakan kawanan ikan yang kemudian dipantulkan dan diterima oleh rangkaian penguat penerima melalui transducer penerima. Oleh rangkaian penguat penerima gelombang yang keluar dari transducer diperkuat dan selanjutnya fasenya
PENGUAT PENERIMA PENGUAT DAYA OSILATOR PHASE SHIFTED DETECTOR LPF Zin = 10 kΩ Zout = 50 Ω Zout = 100 kΩ output TRANSDUCER
dideteksi oleh rangkaian pendeteksi perubahan fase . Bila ada gerakan maka pada keluaran rangkaian pendeteksi perubahan fase akan menghasilkan gelombang perubahan fase yang bentuknya sesuai dengan karakteristik gerakan kawanan ikan yang dideteksi. Berdasarkan teori pada subbab 2.4, gelombang yang keluar rangkaian pendeteksi perubahan fase terdiri dari gelombang perubahan fase itu sendiri dan gelombang pembawa. Untuk menahan gelombang pembawa tersebut, digunakan rangkaian penapis frekuensi rendah (LPF) sehingga yang keluar hanya gelombang perubahan fase saja. Gelombang perubahan fase tersebut selanjutnya direkam di komputer melalui input mikrofon dari komputer dalam file dengan bentuk *. wav.
4.1.3 Daya pancar yang diperlukan
Dari persamaan akustik pada persamaan 32 dapat dicari jarak pancar R untuk Echo Intensity El = 108 dB/1 μ Pa, serta untuk berbagai daya pancar dengan frekuensi 50 kHz dan frekuensi 200kHz yang hasilnya dapat dilihat pada Tabel 1.
Tabel 1. Jarak pancar untuk berbagai frekuensi dan daya pancar Frekuensi 10 W 20 W R (m) 50 W 100 W Redaman dB/km
50 kHz 30 m 50 m 80 m 100 m 5
200 kHz 50 m 70 m 90 m 120 m 8
Dari Tabel 1, untuk frekuensi 50 kHz jarak tempuhnya lebih pendek dari 200 kHz. Hal ini disebabkan directivity transducer yang digunakan untuk frekuensi 50 kHz lebih kecil dari directivity untuk frekuensi 200 kHz bila menggunakan transducer yang sama. Jadi untuk penelitian frekuensi yang digunakan adalah 200 kHz, sedangkan daya pancar yang dibutuhkan untuk mendeteksi perubahan fase tidak lebih dari 10 m, pada penelitian ini cukup menggunakan pemancar dengan daya 10 Watt.
4.1.4 Transducer
Transducer yang digunakan adalah transducer dengan frekuensi 200 kHz, beamwidth 120. Adapun spesifikasi transducer dapat dilihat pada pada Tabel 2.
Tabel 2. Spesifikasi transducer yang digunakan
N Transducer Tipe Z Beam Width Daya
maksimum. 1 Transmitter AIRMAR Thru-Hull Flush P219 100 kΩ 450 / 120 100 W 2 Receiver GARMIN 10 kΩ 450 / 120 50 W
Pada Gambar 37 dapat dilihat foto dari transducer pemancar dengan menggunakan transducer tipe “Thru-Hull Flush” sedangkan tranducer penerima menggunakan Transducer GARMIN. Masing-masing transducer mempunyai frekuensi kerja yaitu frekuensi 50 kHz dan 200 kHz
Gambar 37. Foto transducer. 4.1.5 Osilator
Rangkaian osilator digunakan untuk membangkitkan gelombang akustik pada frekuensi tertentu. Pada penelitian ini frekuensi yang dibangkitkan adalah 50 kHz dan 200 kHz, dimana frekuensi 50 kHz digunakan sebagai pembanding. Rangkaian osilator dapat dilihat pada Gambar 38.
Transducer pemancar
Transducer penerima
Gambar 38. Rangkaian osilator dengan rangkaian penguat.
Besar frekuensi yang dibangkitkan tergantung dari nilai variable resistor R1 dan kapasitor 50 pF untuk frekuensi 50 kHz, sedangkan untuk frekuensi 200 kHz tergantung dari variable resistor R2 dan kapasitor 100 pF. Resistor R1 dan
+
-2 3 4 7 6 +12V -12V 741+
-2 3 4 7 6 +12V -12V 741 100 k 100 k 100 k 10 k 10 k 51 Ke Balance modulator A1 B2 100 p B1 R2 R1 50 p A2+
-2 3 4 7 6 +12V -12V 741 10 k 20 k Ke Power Amplifier A1 A2 B1 B2 Switch yang bergerak bersamanR2, menggunakan tipe variable agar dapat diatur pada frekuensi yang tepat. Frekuensi diukur dengan menggunakan instrumen frequency counter.
Unjuk kerja rangkaian osilator dapat dilihat pada Gambar 39. Pada gambar, bentuk gelombang yang dibangkitkan berbentuk gelombang segitiga yaitu gelombang yang mempunyai beberapa komponen spektral diatas frekuensi dasarnya yaitu di atas 200 kHz yang selanjutnya akan diredam oleh transducer.
Waktu (detik)
Gambar 39. Unjuk kerja rangkaian osilator.
4.1.6 Rangkain penguat daya (power amplifier)
Rangkaian penguat daya digunakan untuk memperkuat daya yang keluar dari osilator. Daya pancar yang dibutuhkan tergantung dari kemampuan transducer dan jarak jangkau yang diinginkan. Kemampuan transducer yang digunakan maksimun 100 watt dan minimum 10 Watt. Disamping sebagai penguat, rangkaian juga berfungsi sebagai penyesuian impedansi dengan transducer yaitu 100 kΩ dengan connector tipe 7 pin. Agar dapat menggunakan baterei tegangan catu dirancang untuk 12 VDC.
Rangkaian penguat daya dapat dilihat pada Gambar 40. Rangkaian penguat daya terdiri dari 2 (dua) bagian yaitu : bagian penguat antara dan bagian penguat akhir. Bagian penguat akhir terdiri dari sepasang transistor 2SC1987 yang dipasang parallel untuk mencapai daya output 10 Watt. Untuk memperoleh daya tersebut dibutuhkan daya input minimum sebesar 50 mW. Untuk memperoleh daya
Tegangan (mV)
tersebut, sinyal dari osilator dikuatkan terlebih dahulu oleh rangkaian penguat antara dengan menggunakan transistor BC 108. dengan penguatan sebesar 60 mW.
Unjuk kerja dari rangkaian penguat daya (power amplifier) dapat dilihat pada Gambar 41 (a) untuk frekuensi 50 kHz dan Gambar 41 (b) untuk frekuensi
Gambar 40. Rangkaian penguat daya.
200 kHz. Pada gambar dapat dilihat untuk frekuensi 50 kHz keluaran dari rangkaian penguat daya berupa gelombang segiempat sedangkan output untuk frekuensi 200 kHz berupa gelombang sinusoida yang masing-masing penguatannya sebesar 100 kali dengan skala input pada osiloskop pada posisi 50 mV dan output pada posisi skala 5 V. Untuk frekuensi 50 kHz keluaran dari osilator lebih besar dari keluaran pada frekuensi 200 kHz karena transistor yang digunakan mempunyai gain lebih besar pada frekuensi yang lebih rendah, yaitu makin tinggi frekuensi makin kecil penguatannya, sehingga tegangan gelombang dengan frekuensi 50 kHz yang masuk ke rangkaian penguat daya lebih besar dari tegangan pada frekuensi 200 kHz.
+12 VDC Ke Transducer Pemancar Dari Oskilator BC108 680 10 470 47 60 k 33 k 2SC1971 .5 μF .5 μF .5 μF
deti (a)
(b)
Gambar 41. Unjuk kerja rangkaian penguat daya untuk (a) frekuensi 50 kHz (b) frekuensi 200 kHz.
Rangkaian penguat daya dirancang untuk penguat gelombang pada frekuensi 200 kHz sehingga pada frekuensi 50 kHz gelombang yang masuk ke
INPUT dari osilator (skala 50 mV) OUTPUT (skala 5 V) Waktu (detik) Tegangan (mV/V) INPUT dari osilator (skala 50 mV) OUTPUT (skala 5V) Waktu (detik) Tegangan (mV)/ V
rangkaian penguat daya mengalami cacat nonlinear pada bagian puncak gelombang sehingga gelombang pada frekuensi 50 kHz akan terpotong dan gelombang yang keluar mendekati bentuk segiempat. Disamping itu pula gelombang segitiga, komponen frekuensi tingginya diperkuat lebih kecil dari frekuensi dasarnya sehingga gelombang yang keluar pada frekuensi 200 kHz menjadi gelombang sinusoida.
4.1.7 Rangkaian penerima (receiver)
Fungsi dari rangkaian penerima adalah untuk menyesuaikan impedansi input rangkaian dengan impedansi transducer penerima yaitu sebesar 10 kΩ dan menguatkan tegangan transducer untuk mencapai tegangan yang dapat diolah oleh balance modulator
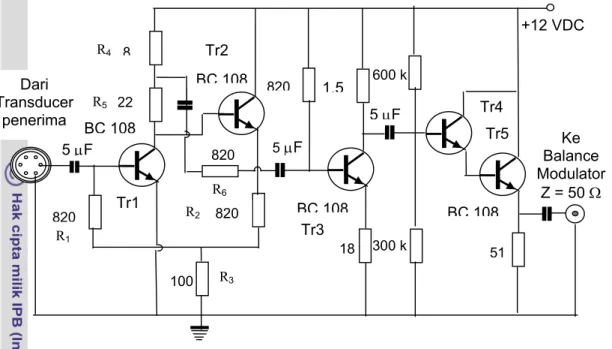
Rangkaian penerima dapat dilihat pada Gambar 42. Pada gambar rangkaian penerima terdiri dari 3 (tiga) bagian yaitu bagian penguat awal terdiri dari Transistor Tr 1 dan Tr 2, bagian penguat antara dengan transistor Tr3 dan bagian penyesuai impedansi rendah 50 Ω yang menggunakan rangkaian “Darlington” dengan transistor Tr4 dan Tr5 yang semuanya menggunakan Transistor BC 108. Rangkaian bagian penguat awal dirancang sedemikian rupa agar mampu mencapai penguatan 100 kali dengan impedansi input 10 kΩ. Hal ini hanya dapat dilakukan dengan rangkaian seperti pada gambar karena rangkaian penguat Class A tidak dapat dikompromikan antara impedansi dengan penguatan yang diinginkan. Pada gambar nilai R1, R2 dan R3 dihitung agar diperoleh impedansi 10 kΩ serta bersama R4 + R5 diperoleh titik kerja untuk mencapai penguatan 100 kali. Resistor R6 digunakan hanya bila sinyal yang keluar cacat sehingga perlu dibatasi oleh resistor R6 tersebut.
Gambar 42. Rangkaian penerima (receiver).
Unjuk kerja dari rangkaian penerima dapat dilihat pada Gambar 43 untuk frekuensi 50 kHz dan frekuensi 200 kHz dengan masukan gelombang sinusoida menghasilkan penguatan dengan bentuk gelombang yang sama yaitu gelombang sinusoida . Perbedaannya adalah tegangan yang dihasilkan pada fekuensi 50 kHz 5 mv lebih besar dari frekuensi 200 kHz. Hal ini tidak mempengaruhi terhadap proses pendeteksian penggeseran fase oleh rangkaian phase shifted detector.
Gambar 43. Unjuk kerja rangkaian penerima.
+12 VDC Dari Transducer penerima BC 108 BC 108 820 820 100 820 18 22 820 1.5 18 5 μF 5μF Balance Ke Modulator Z = 50Ω 600 k 300 k 51 5μF BC 108 BC 108 Tr1 Tr2 Tr3 Tr4 Tr5 R1 R2 R3 R4 R5 R6 Waktu (detik) Tegangan (mV)
Pada gambar dapat dilihat bentuk gelombang yang dihasilkan garisnya agak tebal, hal ini disebabkan karena derau (noise) thermal dari rangkaian penerima
4.1.8 Low pass filter (LPF)
Fungsi LPF adalah untuk memblok sinyal gelombang pembawa frekuensi 50 kHz atau 200 kHz atau diatasnya dan hanya melewatkan frekuensi gelombang perubahan fase.
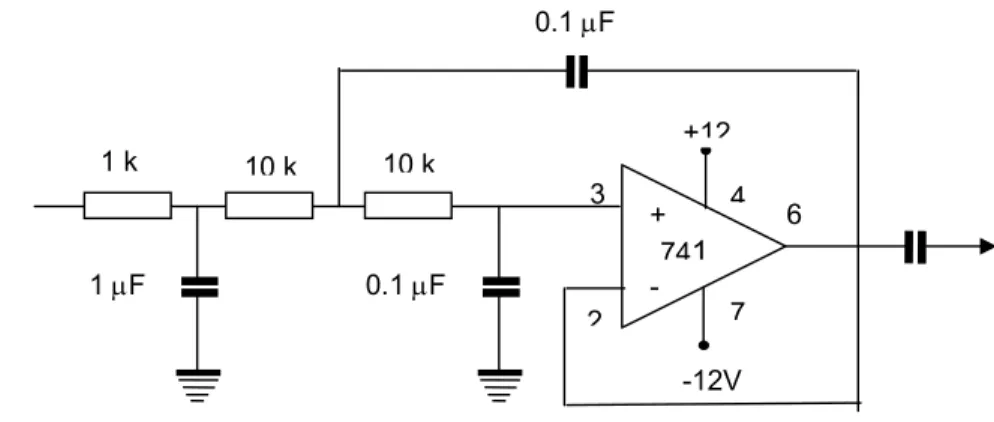
Rangkaian LPF dapat dilihat pada Gambar 44. Rangkaian ini dirancang untuk memperoleh frekuensi Cut off 1 kHz, dan menggunakan teknik Active Filte. Rangkaian LPF menggunakan komponen OpAmp LM 741
Unjuk kerja rangkain LPF dapat dilihat pada Gambar 45. Pada gambar dapat dilihat frekuensi diatas frekuensi cutoff 1 kHz diredam sedangkan frekuensi dibawah frekuensi cutoff 1 kHz dilewatkan.
Gambar 44. Rangkaian low pass filter (Texas Instrument, 1986).
Gambar 45. Unjuk kerja rangkaian low pass filter.
+ -2 3 4 7 6 +12 -12V 741 1 k 10 k 10 k 0.1 μF 1 μF 0.1 μF ωcutoff = 1 kHz ωc - ωi ωc = 200 kHz 2ωc PASS/ lewat STOP / teredam dB 3 dB ω=2πf ωc + ωi Gain
4.1.9 Phase shifted detector
Fungsi rangkaian phase shifted detector adalah untuk mendeteksi perubahan fase dari sinyal gelombang yang dipantulkan oleh pergerakan kawanan (schooling) jenis ikan tertentu
. Rangkaian phase shifted detector dapat dilihat pada Gambar 46. Pada penelitian ini rangkaian phase shifted detector menggunakan teknik balance modulator, yaitu dengan menggunakan komponen MC1496 dari Motorola (Motorolla, 1990)
Uji coba rangkaian phase shifted detector dilakukan dengan menggunakan rangkaian modulator fase sebagai pembangkit gelombang sinyal yang fasenya berubah-ubah sesuai dengan sinyal yang dibangkitkan signal generator (Gambar 47). Dari uji coba tersebut diharapkan bentuk gelombang sinyal yang dibangkitkan signal generator sama dengan bentuk gelombang yang keluar dari rangkaian Filter.
Gambar 46. Rangkaian phase shifted detector (Motorola, 1990).
2 3 8 6 10 MC1496 1 4 12 14 5 - 8 V 1 k 1 k 1 k 51 51 51 50 k 750 750 6.8 k 3.9 k 3.9 k 0.1 0.1
Gambar 47. Diagram blok uji coba rangkaian phase shifted detector dengan menggunakan balance modulator.
Bentuk gelombang yang digunakan pada uji coba tersebut adalah gelombang sinusoida, dan gelombang segiempat.
Hasil uji coba untuk kedua bentuk gelombang dapat dilihat pada Gambar 48. Pada Gambar 48 (a) dapat dilihat gelombang yang keluar dari rangkaian phase shifted detector sesudah rangkaian LPF sama dengan gelombang masuk ke phase modulator. Hal ini juga membuktikan bahwa phase shifted detector mampu mendeteksi perubahan fase dari gelombang modulasinya dalam hal ini mewakili gelombang gerakan kawanan ikan. Untuk gelombang input berbentuk segiempat, keluarannya tetap gelombang sinusoida seperti pada Gambar 48 (b).
Hal ini disebabkan spektrum diatas frekuensi dasar dari gelombang segiempat diredam oleh rangkaian LPF sehingga yang keluar adalah gelombang dengan frekuensi dasar yang bentuknya merupakan gelombang sinusoida .
Vm = A cos [2πfc + φ(t)] dimana φ(t) = 2πfm Signal Genera tor Oskilator 50 kHz & 200 kHz Phase Modula tor Phase Detector LPF Rangkaian yang diuji fm fc fc fm f
Tegangan (mV) Waktu (detik) (a) Tegangan (mV) Waktu (detik) (b)
Gambar 48. Unjuk kerja rangkaian phase shifted detector.
4.1.10 Uji coba rangkaian keseluruhan
Diagram blok uji coba rangkaian keseluruhan dapat dilihat pada Gambar 49. Sebagai pembangkit gelombang perubahan fase digunakan rangkaian phase modulator yang sinyalnya dikuatkan oleh rangkaian penguat daya.
Gelombang input phase modulator Gelombang output phase detector Gelombang output phase detector Gelombang input phase modulator
Gambar 49. Diagram blok uji coba sistim perangkat keseluruhan.
Uji coba dilakukan dengan memasukkan transducer ke dalam air. Gelombang dari signal generator akan terdeteksi pada monitor komputer dengan menggunakan perangkat lunak ’Cool Edit Pro’. Pada monitor akan terlihat gelombang yang sama bentuknya dengan gelombang yang dibangkitkan signal generator.
Foto peralatan secra keseluruhan dapat dilihat pada Gambar 50 sedangkan Foto dari setiap unit rangkaian dapat dilihat pada Gambar 51.
Gambar 50. Foto dari peralatan secara keseluruhan.
DALAM AIR Power Ampl Osila-tor 200 Khz Penguat Penerima Phase Modu lator Signal generator Phase Detector LPF komputer Perangkat pendeteksi jenis kawanan ikan Transducer pemancar Transducer penerima Batereii
Gambar 51. Foto rangkaian dari masing-masing unit.
4.2
Rancang Bangun Perangkat Lunak HMM
4.2.1 Algoritma membangun basis data sebagai pembanding
Proses pembentukan basis data dilakukan dengan menggunakan perangkat lunak MATLAB. Diagram alir proses pembentukan basis data sebagai pembanding dapat dilihat pada Gambar 33 di Subbab 3.4.1.
Tahap pertama dalam proses membangun basis data adalah membuat label dari nama-nama jenis ikan yang diamati.
Algoritma membuat label adalah :
Untuk I = 1 sampai 5 Input nama ikan; Tulis nama ikan;
Nama label nama ikan[i] = nama ikan Kembali
Rangkaian Osilator
Rangkaian Penerima
Rangkaian phase shifted detectection
Proses selanjutnya adalah proses ekstraksi yang didahului dengan membuat sample dari gelombang perubahan fase yang diterima. Algoritmanya sebagai berikut :
Tentukan (define) parameter sampling; Dari i = 1 sampai n
Imread nama ikan.wav;
Gelombang [i] = nama ikan.wav; Gelombanginput = gelombang[i]; make sample (gelombang input);
sample[i] = gelombang input;
kembali
Pada proses FFT dan proses kuantisasi vector dengan algoritma LBG algoritma pemogramanya sebagai berikut :
Tentukan besar nilai N Untuk I = 1 sampai M
Hitung FFT untuk setiap sample[i]; Sample point[i] = milai FFT;
kembali
Tentukan cluster;
Untuk j =1 sampai cluster
Hitung centroid dengan LBG;
Simpan centroid[j] berdasarkan urutan labelnya;
Kembali
Proses pembentukan HMM untuk memperoleh parameternya untuk setiap label berdasarkan centroid yang diperoleh dalam basis data algoritma nya sebagai berikut :
Hitung jumlah centroid; State = jumlah centroid;
4.2.2 Algoritma proses pengenalan (recognition)
Diagram alir proses pengenalan dapat dilihat pada Gambar 34 Subbab 3.4.2. Algoritma mulai dari sampling sampai VQ sama seperti pada proses pembentukan basis data di Subbab 4.2.1. Proses pengenalan dengan HMM algoritma dapat ditulis sebagai berikut :
mulai
imread nama ikanuji.wav;
gelombang = nama ikanuji.wav; penggal gelombang per 0.1 detik; untuk g = 1 sampai M
gelombangikanuj[g] = penggal gelombang; kembali
tentukan nilai sampling dari gelombang_ikanuji; sampling gelombang_ikanuji;
untuk i = 1 sampai jml_penggal H hitung FFT untuk N;
matriks codeword_ikanuji[i,m,n];
cari centroid pada basis data untuk codeword_ikanuji;
tentukan observasi dari urutan dari centroid; tentukan parameter HMM;
untuk h = 1 sampai jml_label
baca data parameter HMM untuk jenis ikan lainnya dari basis data;
hitung log of probability (LoP) untuk semua label dan ikanuji;
LoP[jml_label] = LoP;
Cari LoP[jml_label] = tertinggi;
tentukan nama label untuk LoP tertinggi
kembali
kembali selesai.
4.2.3 MATLAB TOOL BOX command 1) Membuat Label
Label dimaksud untuk memperoleh file dari basis data untuk setiap jenis gerakan ikan yang berisi hasil pembelajaran dengan list program terlampir (Lampiran 5)
Berikut ini langkah-langkah untuk membuat label untuk basis data : 1. Menuliskan fungsi pada Command Window Matlab
make_labels(5);
Fungsi ini membuat basis data dengan vektor pembelajaran masing-masing data sebanyak 5 kali.
2. Menuliskan nama untuk label pertama dalam hal ini adalah bandeng. 3. Merekam gelombang gerakan ikan untuk vektor pembelajaran yang
pertama. Durasi waktu untuk merekam suara adalah 3 detik.. Bila sinyal gelombang gerakan dapat dideteksi maka akan muncul plot sinyal, energi dan spektrogram dari sinyal yang direkam. Pada grafik sinyal akan terlihat start-end dari gelombang gerakan ikan. Bila start-end gagal terdeteksi maka akan keluar kata ‘error’, dan akan terlihat pada layar Matlab ‘Bad Detection, out of range’.
4. Selanjutnya komputer akan menanyakan apakah akan menyimpan vektor pembelajaran yang dibuat atau tidak. Bila terjadi kata ‘error’ maka ketik ‘n’ untuk tidak menyimpan vektor pembelajaran tersebut, dan sistem akan kembali mengulang langkah sebelumnya dimana user akan kembali memasukan vektor pembelajaran yang pertama. Bila tidak terjadi kata ‘error’ maka ketik ‘y’ untuk menyimpan vektor pembelajaran tersebut. 5. Merekam gelombang gerakan ikan yang sama untuk pembelajaran yang
ke-2 sampai ke-5.
6. Mengulangi langkah ke-2 sampai semua label direkam.
2) Proses pembelajaran
Proses pembelajaran dilakukan bersamaan pada saat pembuatan label mulai dari pembentukan VQ dengan list program terlampir (Lampiran 5).
3) Membangun code book
List program untuk membangun codebook dicantumkan pada Lampiran 5
Setelah proses pembelajaran dilakukan, langkah selanjutnya adalah membuat codebook dari vektor pembelajaran yang telah dibuat. Codebook ini dibuat dengan menggunakan fungsi
make_codebook(filename,M,iteration) dimana filename : nama file codebook yang akan disimpan
M : ukuran dari codebook
Iteration : banyaknya iterasi pada General LloydAlgorithm File codebook yang terbentuk akan disimpan pada folder yang sama dengan letak m-file dari fungsi ini.
Pada penelitian program pengenal gelombang gerakan, nama dari file codebook yang terbentuk adalah ‘DSP_codebook’, ukuran codebook yang digunakan adalah 32 dan iterasi sebanyak 5 kali.
make_codebook('DSP_codebook',32,5);
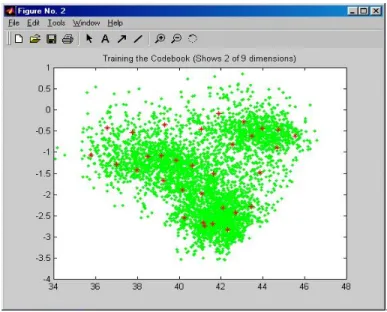
Fungsi make_codebook ini akan membuat file codebook tersebut. Tampilan codebook dari database dapat dilihat pada Gambar 52, sedangkan tampilan codebook dari pembelajaran dalam 2 (dua) dimensi dapat dilihat pada Gambar 53.
.
Gambar 53. Tampilan dimensi 2 dari pembelajaran codebook. .
1) Membuat proses HMM
Proses HMM dalam penelitian ini dilakukan dengan membuat program dengan list program sebagaimana tercantum pada Lampiran 5
Model-model HMM akan terdiri dari matrik-matrik Ai, Bi, dan p0i untuk setiap label(i), (i=1…5). Untuk membuat model HMM ini digunakan fungsi
make_HMM(model_file,codebook,iteration)
dimana model_file : nama file dari model-model HMM A : matrik transisi
B : probabilitas matrik dari observasi p0 : vektor dari initial probability
codebook : nama file dimana data codebook disimpan iteration : jumlah iterasi dari Baum Welch Algorithm Pada penelitian ini digunakan fungsi
make_HMM('model_DSP','DSP_codebook',10); Fungsi tersebut akan membuat file model HMM dengan nama ‘model_DSP.mat’ dengan menggunakan file ‘DSP_codebook.mat’ untuk
mengkuantisasi observasi. Observasi tersebut disimpan dalam file ‘fileobservation.mat’. Jumlah iterasi untuk Baum Welch Algoritm adalah 5.
Tampilan layar monitor dalam membuat model HMM adalah grafik probabilitas dari label.
2) Proses HMM untuk recognition
Pemograman untuk proses HMM dapat dilihat pada Lampiran 5 function make_HMM(model_file,codebook,iteration)
Pada tahap pengenalan (recognition) sistem ini akan membandingkan parameter centroid gelombang gerakan kawanan ikan yang masuk dalam basis data. Sistem ini akan menggunakan file DSP_codebook untuk mengkuantisasi gelombang input yang masuk agar dapat diketahui urutan observasi, nilai kuantisasi dan rata-rata distorsi-nya. Selanjutnya sistem juga menggunakan label-label dari model-model HMM dalam file ‘model_DSP’ untuk dicocokkan dengan gelombang input. Fungsi pemograman yang digunakan untuk proses recognition ini adalah
recognition(model,book);
dimana model : nama file dimana model HMM disimpan book : nama file dimana data codebook disimpan Pada penelitian ini digunakan fungsi
recognition('model_DSP','DSP_codebook'); Untuk memulai proses recognition setelah menuliskan fungsi di atas, maka akan muncul daftar nama jenis kawanan ikan yang ada dalam basis data. Untuk memulai merekam sinyal input yang akan dikenali harus menekan tombol terlebih dulu. Waktu durasi untuk merekam sinyal input hanya selama 3 detik. Selanjutnya akan ditampilkan plot sinyal, energi dan spektrogram sinyal input yang berhasil direkam. Pada akhirnya sistem akan menampilkan probabilitas untuk masing-masing label. Label yang memiliki probabilitas terbesar akan diambil sebagai keputusan.
4.3
Rancang Bangun Perangkat Simulasi Gangguan
Perangkat simulasi digunakan untuk menguji pengaruh berbagai gangguan yang mungkin timbul terhadap gelombang yang diterima. Perangkat simulasi dibangun dengan menggunakan rangkaian elektronik Adapun gangguan yang akan disimulasi adalah :
1. Simulasi gangguan terhadap pantulan gelombang yang dipancarkan
2. Simulasi gangguan terhadap pantulan gelombang pantul dari kawanan ikan yang akan diterima.
3. Simulasi gangguan terhadap derau (noise) dari suara motor.
4. Simulasi gangguan terhadap gelombang dari sumber lainnya (seperti fish finder) dengan frekuensi yang sama dengan frekuensi yang dipancarkan. Dari blok diagram pada Gambar 25 di Bab 3, rangkaian simulasi terdiri dari :
1. Rangkaian phase modulator sebagai pembangkit gelombang pantul akibat pergerakan kawanan ikan yang membentuk suatu gelombang pantul dengan fase yang berubah-ubah dimana perubahan tersebut mewakili gerakan kawanan ikan.
2. Rangkaian penggeser fase sebagai pembangkit gelombang pantul yang fasenya berbeda dengan gelombang datang, baik gelombang yang dipancarkan atau gelombang pantul dari kawanan ikan. Pada rangkaian penggeser fase pengaturan fasenya dilakukan dengan mengatur potensiometer (variable resistor), sedangkan frekuensi akustiknya tergantung dari frekuensi gelombang yang dipantulkan.
3. Rangkaian simulasi pembangkit noise dilakukan dengan menggunakan cassette recorder yang berisi rekaman sinyal noise suara motor
4. Rangkaian penggabung atau rangkaian penyampur (mixer) sinyal gangguan dengan sinyal pantul pergerakan kawanan ikan yang diterima bersamaan oleh rangkaian phase detector .
5. Rangkaian phase detector yang terdiri dari rangkaian phase shifted detector dan low pass filter (LPF).
4.3.1 Rangkaian simulasi pembangkit gelombang perubahan fase akibat pantulan gerakan kawanan Ikan
Fungsi rangkaian simulasi pembangkit gelombang perubahan fase mempunyai fungsi sebagai pembangkit gelombang pantul dari gerakan kawanan ikan. Rangkaian pembangkit gelombang perubahan fase akibat adanya pantulan dari gerakan kawanan ikan, dapat dilihat pada Gambar 54.
Gambar 54. Rangkaian pembangkit perubahan Ffase.
Gambar 55. Diagram blok uji coba simulasi pembangkit perubahan fase.
Output Dari audio generator C1= 0.01μF C2=50pF C3 = 0.01 μF C5 = 0.01 μF C4= 0.01 μF RFC RFC Dari RF generator +Vcc R = 10 kΩ MPF 102 Pembangkit gelombang pembawa (carrier) 200 kHz Phase Modulator
Pembangkit gelombang modulasi 10 – 50 Hz yang mewakili gerakan kawanan ikan
(a) (b) (c)
Gambar 56 Unjuk kerja rangkaian pembangkit perubahan fase (a) samplitude pada skala 10 mV (b) dengan amplitude pada skala 5 mV (c) gelombang segiempat dengan amplitude pada skala 10 mV. Waktu (detik) Waktu (detik) Waktu (detik) Tegangan (mV) Tegangan (mV)
Kapasitor C1 dan C3 berfungsi sebagai kopel untuk mencegah (memblok) tegangan DC agar tidak mempengaruhi tegangan bias dari FET tetapi mampu menyalurkan sinyal RF. Besar nilai kapasitor C1 dan C3 tergantung dari frekuensi RF yang digunakan, sedangkan tegangan bias dari FET tersebut ditentukan oleh resistor R yang nilainya dibuat sedemikian rupa agar FET bekerja pada titik optimum. Kapasitor C2 berfungsi sebagai penggeser fase yang besar penggeserannya tergantung dari besaran sinyal dari signal generator yang masuk. Kapasitor C5 sebagai bypass agar sinyal RF tidak melewati resistor R1. Koil RFC berfungsi untuk memblok sinyal RF agar tidak masuk ke catu daya dan generator sinyal.
Diagram blok uji coba simulasi pembangkit perubahan fase dapat dilihat pada Gambar 55 dan hasil uji coba unjuk kerja rangkaian tersebut dapat dilihat pada Gambar 56 dimana output rangkaian memperlihatkan gelombang carrier mengalami perubahan fase dengan kecepatan perubahan tergantung dari frekuensi sinyal yang dimodulasi (dalam hal ini mewakili gelombang gerakan kawanan ikan). Adapun besar penggeseran fase tergantung dari amplitude sinyal yang dimodulasi.
4.3.2 Rangkaian penggeser fase
Fungsi rangkaian penggeser fase adalah sebagai rangkaian simulasi gelombang pantul yang mempunyai fase tertunda (delay) dari gelombang yang datang (incident wave)
Gambar 57 adalah gambar rangkaian penggeser fase gelombang pembawa dimana fase gelombang pembawa yang keluar mempunyai fase yang berbeda dari gelombang pembawa yang masuk yang besarnya tergantung dari tegangan DC yang besarnya diatur oleh nilai potensiometer R2. Polarisasi tegangan DC akan menentukan posisi penggeseran fase positif atau negatif (mendahului atau terlambat) dari fase yang masuk, sedangkan besarnya penggeseran fase tergantung dari besar tegangan DC yang diberikan. Jadi untuk memperoleh fase yang dapat bergeser positif dan negatif diperlukan baterei dengan dua polarisasi. Untuk penelitian ini digunakan fase negatif atau terlambat karena gelombang pantul selalu mempunyai fase terlambat dari fase yang dipancarkan.
Diagram blok uji coba simulasi penggeser fase dapat dilihat pada Gambar 58 sedangkan hasil uji coba unjuk kerja simulasi dapat dilihat pada Gambar 59. Pada gambar diperlihatkan perbedaan fase gelombang input dengan gelombang output untuk dua kondisi yaitu untuk tegangan DC 3 Volt dan untuk tegangan DC 1 Volt
Gambar 57. Rangkaian pengeser fase.
Gambar 58. Diagram blok uji coba simulasi penggeser fase. MPF 102 RFC RFC Dari RF generator +Vcc Output R1 = 10 kΩ R3 =100 kΩ R2 = 50 kΩ C1= 0.01μF C3= 0.01μF C5= 0.01μF C4= 0.01μF C2= 50 pF Pembangkit gelombang pembawa 200 kHz Phase Shiefted Baterei 3 VDC catu penggeseran fase RF Generator Tombol untuk megatur perbedaan fase
(a) (b) Waktu (detik) (c)
Gambar 59. Unjuk kerja rangkaian penggeser fase (a) penggeseran fase sebesar 1800 dengan tegangan DC maksimum (3 V) (b) penggeseran fase sebesar 90 0 untuk tegangan DC 1 Volt (c) penggesera fase dengan amplitude gelombang pantul lebih kecil dari gelombang datang karena jarak.
Waktu (detik) Tegangan (mV) 900 Waktu (detik) Tegangan (mV) 1800 Tegangan (mV)
4.3.3 Rangkaian penggabung
Fungsi rangkaian penggabung atau penyampur (Adder/ Mixer) berfungsi sebagai penggabung sinyal-sinyal (gelombang-gelombang) yang diterima oleh phase detector disamping gelombang langsung yang dipantulkan gerakan kawanan ikan
Rangkaian penggabung dapat dilihat pada Gambar 60. Rangkaian penggabung terdiri dari dua bagian yaitu bagian penggabung, bagian penguat dan bagian penyesuaian impedansi. Bagian penggabung terdiri dari resistor R4, R5 dan R6 serta potensiometer R1, R2 dan R3 yang fungsinya untuk mengatur level gelombang sinyal di setiap masukan. Bagian penguat terdiri dari rangkaian transistor TR1, sedangkan bagian penyesuaian impedansi terdiri dari transistor TR2 dan TR3 yang merupakan pasangan rangkaian Darlington. Rangkaian tersebut mempunyai impedansi keluaran sebesar 50 Ohm sesuai dengan impedansi masukan dari rangkaian phase detector.
Gambar 60. Rangkaian penggabung (Adder/ Mixer).
TR1 TR2 TR3 1.5 18 Ke Phase Detector Z = 50 Ω 600 k 300 k 51 50μF BC 108 BC 108 50 μF 10 k 10 k 10 k 100 k 100 k + Vcc INPUT 1 INPUT 2 INPUT 3 R1 R2 R3
4.3.4 Foto perangkat simulasi pengaruh gangguan
Foto perangkat simulasi pengaruh gangguan dapat dilihat pada Gambar 61 lengkap dengan instrumen untuk uji coba.
Gambar 61. Foto perangkat simulasi pengaruh gangguan.
Rangkaian Phase Modulator untuk membangkitkan gelombang pantul oleh sekelompok ikan
Rangkaian Phase Modulator untuk membangkitkan pantulan gelombang pembawa (pemancar)
Rangkaian Penyampur/ Adder / mixer
Pengatur fase
4.4 Rancang
Bangun
Perangkat
Simulasi Perubahan Fase
Konstruksi perangkat simulasi gerakan kawanan ikan yang terdapat pada Gambar 62, dapat diatur kecepatan renang, struktur formasi schooling baik vertikal maupun horisontal, jenis permukaan dan bentuk ikan. Perangkat terdiri dari 3 (tiga) bagian besar (Unit) yaitu :
1. Unit Penggerak dan penyanggah belakang 2. Unit ikan-ikanan
3. Unit pengendali jarak jauh
Konstruksi terbuat dari besi siku yang berlubang yang digunakan sebagai rangka perangkat, yang dilengkapi dengan motor listrik DC, Pulley, gear berikut as dan gigi payung atau trapesium.
4.4.1 Unit penggerak
Unit penggerak terdiri dari Motor DC yang digunakan mempunyai spesifikasi 220 VAC 500 Watt. Motor tersebut dihubungkan ke as penggerak melalui pulley 1 inci yang dikopel dengan pulley 4 inci agar diperoleh perbedaan kecepatan 4 : 1. Untuk motor dengan kecepatan 1200 rpm, maka kecepatan as penggerak adalah 300 rpm cukup untuk menarik ikan-ikanan dengan kecepatan 1.5 m/detik. Hubungan pulley 1 inci dengan as penggerak digunakan gear trapesium .
Untuk menarik unit pembawa ikan-ikanan digunakan sepasang tali belt atas bawah sepanjang 12 m melalui pulley yang terdapat 2 buah di as bergerak (Gambar 63 a.) dan 2 buah di as diam di bagian penyanggah (Gambar 63 b.) As bergerak berputar bersamaan dengan pulley sedangkan as diam pulley bergerak (berputar) tetapi as dalam keadaan diam.
Bagian pengendali (pengatur) pada unit pengendali terdiri dari fuse sebagai pengaman, tombol maju mundur, tombol on/off. (Gambar 63 c.).
Gambar 62. Konstruksi simulasi perubahan fase. UNIT PENGGERAK Tampak atas unit pembawa ikan-ikanan Bagian penyanggah UNIT PEMBAWA IKAN-IKANAN Arah Bagian pengendali Bagian polley ikan-ikanan Kerangka menyusun formasi ikan-ikanan belt air
(c)
(b)
(b) (d)
Gambar 63. Konstruksi unit penggerak.
4.4.2 Unit pembawa ikan-ikanan
Konstruksi unit pembawa ikan-ikanan dapat dilihat pada Gambar 64. Unit pembawa ikan-ikanan terdiri dari bagian pembawa ikan-ikanan, bagian penyusun ikan-ikanan dan ikan-ikanan itu sendiri.
Readout Stopwatch Tombol maju mundur Tombol Power on/off Fuse As diam Tampak muka bagian
pulley penyanggah
tampak muka Unit pembawa ikan-ikanan pulley pulley Gear As berputar Soket penyam bung Gigi trape-sium
Bagian pembawa ikan-ikanan terdiri dari 4 (empat) slot untuk menyelipkan penyusun formasi ikan-ikanan yang terbuat dari kayu sebagai rangka slot atas bawah, batang baja bulat sebagai penyanggah rangka slot tersebut. Penggunaan batang bulat untuk menghindari turbulensi dari air. (Gambar 64)
Gambar 64. Konstruksi unit pembawa ikan-ikanan. Kerangka Penyusun formasi ikan-ikanan plat besi penyanggah kerangka Kawat penyusun ikan-ikanan Pembawa ikan-ikanan (Carrier) batang baja penyanggah Carrier Slot untuk kerangka penyusun ikan-ikanan Kayu pengikat kawat/senar
Penyusun ikan-ikanan terdiri dari plat besi 1 x 0.04 m yang dipasang tegak dengan kayu pengikat senar / kawat untuk menyusun ikan-ikanan. Ikan ikanan disusun zig-zag (belah ketupat), dan jajaran jenjang
Jenis ikan-ikanan yang digunakan adalah : 1. ikan-ikanan berukuran 20 x 25 cm dari bahan tripleks 2. ikan-ikanan berukuran 30 cm dari bahan tripleks 3. ikan-ikanan berukuran 20 x 25 cm dari bahan karet
4. ikan-ikanan berukuran kecil permukaan rata dari bahan tripleks 5. ikan-ikanan ukuran kecil permukan cembung dari bahan kayu
Ikan-ikanan berukuran 20 x 25 cm dengan permukaan dari tripleks dan dari karet dapat dilihat pada Gambar 65, ikan-ikanan berukuran 30 cm dapat
(a)
(b)
Gambar 65. Bentuk ikan –ikanan berukuran 20 x 25 cm (a) dari bahan tripleks (b) dari bahan karet.
TRIPLEKS
KARET
20 cm
dilihat pada Gambar 66 dan ikan-ikanan berukuran 10 cm dapat dilihat pada Gambar 67.
Gambar 66. Bentuk ikan-ikanan berukuran 30 cm.
.
Gambar 67. Bentuk ikan-ikan berukuran 10 cm. 4.4.3 Unit pengendali
Unit pengendali terdiri dari stop otomatis, pengendali jarak jauh, rangkaian pengatur maju mundur dan pengatur kecepatan. Konstruksi stop otomatis digunakan untuk menjaga agar unit ikan-ikanan yang ditarik tidak menabrak pulley sehingga sebelum sampai ke pulley secara otomatis unit ikan-ikanan berhenti. Konstruksi stop otomatis dapat dilihat pada Gambar 68.
Permukaan dari tripleks
30 cm
Permukaan rata dari bahan tripleks
Permukaan cembung dari bahan kayu
Gambar 68. Konstruksi stop otomatis.
Selanjutnya tombol pengendali jarak jauh dibangun untuk dapat mengatur gerak maju mundur dan mengatur kecepatan pada lokasi dimana perangkat pendeteksi jenis kawanan ikan berada agar dapat langsung dilihat gelombang perubahan fase yang dibangkitkan pada monitor komputer saat ikan-ikanan ditarik Tampilan tombol pengendali jarak jauh dapat dilihat pada Gambar 69.
Gambar 69. Tampilan tombol pengendali jarak jauh. pembawa
ikan-ikanan
maju
Ke rangkaian
listrik pembawa ikan-kerangka unit ikanan maju Tombol pengatur kecepatan Tombol maju mundur Tombol on/off Konektor ke motor Konektor ke tombol maju mundur di motor
Rangkaian pengatur maju mundur ikan -ikanan dapat dilihat pada Gambar 70. Rangkaian tersebut dihubungkan dengan rangkaian stop otomatis.
Gambar 70. Rangkaian pengatur gerakan maju mundur.
Rangkaian pengatur kecepatan dapat dilihat pada Gambar 72 Pengatur kecpatan dilakukan dengan menggunakan komponen TRIAC.
Gambar 71. Rangkaian pengatur kecepatan.
4.4.4 Foto konstruksi simulasi
Foto kontruksi simulasi perubahan fase dapat dilihat pada Gambar 72. Gambar memperlihatkan unit penggerak, unit pengendali dan unit ikan-ikanan.
Fuse Switch on/off LED lampu Ke motor Switch maju/ mundur Stop switch Maju : off Stop switch 220 VAC R2 500 68 R1 100 0,1 μ F 0,1 μ F 0,1 μ F TR TR Ke motor listrik
Gambar 72. Foto konstruksi simulasi perubahan fase (a) unit penggerak (b) unit ikan-ikanan (c) unit pengendali (d) bagian penyanggah. (e) bagian motor listrik
(a) (b)
(c) (d)