DAFTAR tSt (CONTENIS):
o
Aktivitas katalis Ni/H.-NZA dan mekanismenya pada konversi jelantah menjadi s e n y a w a f r a k s i solar dan bensin dengan umpan pancingan j e n i s metanol dan butanol. The Activity of N)/Hs-NZA catalyst and it's mechanism in the conversion of waste cooking oil to diesel and gasoline f uel fraction within methanol and butanol as catching-feed. D. Setyawan PH, (134-142)Kandungan protein dan lemak belut sawah (monopterus albus, zuieuw) pada berbagai ukuran dari desa seyegan sleman. The contains of protein and lipid belut sawah (monopterus albus, zuieuw) atvarious lengthfrom seyegan sleman
Yoni Suryani , (143-148)
s-Speed structure : seismogram analysis and fitting of earthquake c122zg7Aon RAR observation station. Bagus Jaya Santosa, (149-155)
optimalisasi penggunaan atomic physics equipment dalam pbm untuk pengem-bangan life skills mahasiswa. The optimalisation of the use of atomic physics equipment in instructional process to develop the life skilt of students. yusman Wiyatmo, Warsono, dan Sukardiyono, (.1 56-162)
s t u d i je n i s , komposisi dan karakter s a m p a h di lingkungan k a m p u s Universitas Negeri Yogyakarta serta straiegi pengelolaannya. The study of kinds, compositions and characters of wesfe at campus Llniversitas Negeri yogyakarta and its m a n ag e m e n t sfrategies. H Yul i priya nt o, (l 63- 17 2)
Perancangan logika kabur untuk memperbaiki kinerja (propottional integral derivative power system stabitizer). Design o'f luzzy logic to improve proportional integral derivative power system stabilizer performance. Toto Sukisno & Agus M a m a n A b a d i , ( 1 7 3 - 1 8 0 )
Preparation and characterization of lanthanum (lll) selective electrode baseo on 1,1j-diaza-4,7,13,16{etraoxa-cyclooctadecane-n,n'-diacetic acid as an ionophore. S u y a n t a , S u s a n t o l . R , Buchari d a n I n d r a Noviandri, ( 1 8 1 - 1 g Z )
Reactions of cis-[Ptcl(1'Nl4r1lro;1-,the flrst cisplatin hydrolytes with ihiols. 3 : r e a c t i o n s w i t h g l u t a t h i o n e . S u t o p o Hadi, (188-190)
o
o
o
o
o
o
JURME
ffiDffffitr MWWMDAtr
$trtr$
(JPMS)
I S S \ : l j j , r _ I \ r , r ,
T e r a k r e d i t a s i s e b a g a i J u r n a l l l m i a h
Berdasarkan Keputu s an D itje n DtKTt Depdikn as N o. 39/DIKTI/Kep/2004
Visi: Menjadi n-redia komunikasr vang ntalnpu sec;trJ I.l\3t3 nlenlberikan sumbangan terhadap perkembangan bidang Pendrdrkan \ IIP \ dr InJt'rne s i,l
Misi: Menyebarluaskan hasil penelitian dan hastl kaj ian dalarr bidang Pendidikan MIPA.
Diterbitkan oleh
Fakultas Matematika dan Ilmu Pengetahuan Alam, Universitas \e-seri \b,eyakarta Ketua PenYunting:
Prof. Suryanto, Ed.D Penyunting Pelaksana:
Prof. Suryanto, Ed.D K.H Sugiyarto, Ph.D
Paidi, M.Si. Dr. Hari Sutrisno Dr. Zuhdan Kun PrasetYo, M.Ed.
SukiYa, M.Si. Fauzan, M.Sc. Dadan Rosana. M.Si
Pen.v-unting Ahli:
Prof. Drs. Sugeng Mardiyono. MApp.Sc.. Ph.D. tU\\-t Prof. Dr. Soepamo Dannauidjaja tUG\It.
Prof. Dr. Ir. Djoko Nlarsono (UG\l) Prof. Dr. \\'uryadi. \'1.S. (L\\')
Dr. Yateman Arivanto (UGI\'I)
Pembantu Pelaksana: Drs. Yudi Sutomo
Paekan
Luy out Paidi Hari Sutrisno
Alamat Dewan PenYunting:
Kampus FMlPAUniversitas Negeri Yogyakarta, Karangmalang, Yogyakarta, Gedung DOl Telp. (0274) 548203,Fax. (0274) 540713
iffi S.
rs3JiL rcdr{
hehcr iq!
ffd
)"9
nnart ilin
n e \
k l u n ina der.T A " \ , l 9 q
\\
r3 50
frs ) bud
H i d ad h^:
F-r
&r"iny lr:nalb
InTp':.tlm
'ga,mr
f/"{'Jfi,lml
e*.r;onm
J P M S , E d i s i T a h u n X l , N o . 1, Juni2006
\CANGAN LOGIKA KABUR ANTUK MEMPERBAIKI KINERJA
TIONAL INTEGRAL DEMVATIVE POWER SYSTEM STABILIZER)
r OF FUZZY LOGIC TO IMPROVE PROPORTIONAL INTEGRAL DERIVATIVE POWER V STABILIZER PERFOB.MANCE)
snnrcnst), Agus Maman Abadi2)
Fendidikan Teknik Elektro FT UNY Yogyakarta Fendidikan Matematika FMIPA UNY Yoevakarta
lryuan penulisan artikel ini adalah untuk mendapatkan rancangan kendali logikfl fwzy guna menggantikan ; Froportional Inltegral Derivative Power System Stabilizer pada sistem eksitasi.
Sadi stabilitas yang tepat dan kontinyu sangat diperlukan untuk menganalisis sistem supaya dapat bekerja efehif. Untuk mempelajari stabilitas dinamis yaitu stabilitas generator yang mengalami perubahan beban, iigmakan pemodelan terhadap komponen-komponen seperti generator sinlvon, saluran transmisi, dan ",,mg diturunkan dari persamaan-persamaan matematis yang mewakili perilaku dinamis sistem. Penurunan persarTaan matematis yang mewakili perilaku dinamis sistem dapat dideslwipsikan dengan n persamaan diferensial linear dan akibat yang terjadi yang berupa osilasi frekuensi rendah dapat kembali dengan menambahkan sinyal kendali tambahan. Penambahan sinyal kendali tersebut dengan menambahkan blok PSS berupa blok washout dan lead compensator dengan masukan berupa
ke c e p at an r o t or, p e r u b ahan fr e kuen s i at au p e r ub a han alrs e I e r as i day a.
"-p-va memperbaiki kompensator mendakului untuk sqat ini menggunakan kendali kompensator PID Integral Derivative). Kendali PID dapat memperbaiki tanggapan nansien dan mengeleminasi galat ; wtak. Tetapi di sisi lain, PID juga mempunyai kelemahan yaitu timhulnya lonjakan yang relatif besar dan rrru*nu lrnccpaian kondisi tunak yang relatif lama. Berdasarkan kelemahan-kelemahan tersebut, dalam tulisan ini ,wncoba mendesain iistem kendali logika kabur untuk menggantikan kendali PID yang diharapkan dapat
i kelemohan-kelemahan pada kendali PID. lffim' {rrrrc i.' kend al i P I D, I o g i ka fuoy, ke s t a b i I an.
' . : i
dmrr-u"-lhis aim of this paper was lo obtain a design of fuzzy logic to replace the Derivative Integral Proportional /flmhffis- Ststem Stabilizer control at excitation system.
*ability study correctly and continuously very needed to analyze of system so that can opeyate by effectively. ilh, ru;rt: the dynamic stability that is generator stability experiencing load changing, hence used modeling to uwqpmrents like synchranize generator, transmission line, and load which derived from mathematical equations rltWlrrisflrr dynamic behwior of electric power system. Derivation of mathematical equations represent dynamic riffi*@Bmr of system can elqborated by using equation of dffirential of linear and ffict that happened which is in Ittilh,.tirner of low frequency oscillation can be re-stabilized by enhancing the addition control signal. The addition of ilrl[niln"lu signal done by enhancing PSS block in the form washout block and lead compensator with the input in the M,:y change of rotor speed, change offrequency or change of power acceleration.
TW effort to improve the leod compensator in this time using the contol of compensator PID (Derivative JrenC Proportianal). The control of PID can improve the transient response and eliminate error of steady state. rn the other side, PID also have the weakness that is jump incidence which big relative and time of mffirl,rment steady state which old relative. Based on the wealcness, in this article will try to design the fuzzy logic {6ffinqr{rrstem to rbplace the PID control expected cqn overcome the weakness of PID control.
,'iilicm' runj'rdr.' P I D control, fuzzy logic, stab ility. L i n
JPMS, Edisi Tahun Xl, No' 1, Juni 2006 t74
A. Pendahuluan
Salah satu permasalahan yang muncul pada sistem tenaga tistrif adalah masalah stabilitas dan dinamika siitem terhadap adanya gangguan' Sebuah generator dikatakan bekerja balk bila kecepatan irekanik dari rotor sama dengan kecepatan ierputarnya medan putar stator' Dalam satu unit generator-yan g terhubun g j ari n gan yan g' m en gandung generator-generator lain, jika putaran Jotornya turun iraka sudul dayanya akan berkurang' Gangguan yang terjadi pada iistim tenaga listrik, misalnya pada geirerator dapat menimbulkan osilasi terhadap f,arameter-parameter sistem seperti tegangan' frekuensi,' dan daya, padahal kebutuhan sistem menghendaki agat parameter-parameter tersebut bernilai tetap paJa suatu titik operasi tertentu' Oleh karena itu, permasalahan dalam stabilitas sistem tenaga adalah bagaimana agar osilasi yang terjadi akibat gangguan tersebut dapat secepat mungkin kembali stabil.
Studi stabilitas yang tepat dan kontinyu sangat diperlukan untuk menganalisis sistem. supaya dapat Uet<e4a dengan efektif. Untuk mempelajari stabilitas dlnamis yaitu stabilitas generator yang mengalami perubahan beban, maka digunakan pemodelan ierhadap komponen-komponen seperti generator sinkron, saluran transmisi, dan beban yang diturunkan dari persamaan-persamaan matem{1t y-uttg mewakili perilaku dinamii sistem. Menurut Yu (1983), osilasi frekuensi rendah yang terjadi sebagai akibat dinamika sistem dapat distabilkan kembali dengan menambahkan sinyal kendali tambahan' Penambahan sinyal kendali tersebut dilakukan dengan menambahkan blok PSS (Power Systgm Stabilizer) berupa blok washout dan lead compensator dengan masukan berupa perubahan kecepatan rotor' perubahan freku-ensi atau perubahan akselerasi daya' tPenalaan
sinyal kendali tambahan secara konvensional dilakukan dengan menghitung parameter PSS berdasarkan data sistem yang diketahui'
Seiring dengan perkembangan di bidang imu pengetahuan, upaya memperbaiki. kompensator men"dahului selanjutnya digunakan kendali kompensato r PID (Proporti onal Int egr.al D er iv ativ e)' Pengendali ini merupakan pengendali proses linear denlan teori matematika yang lengkap dan mampu merancang secara tepat dan aman suatu kendali l"tptogtu; Kendali PID dapat memperbaiki tanggapan ranslen dan mengeleminasi galat kondisi tuni[. Tetapi di sisi lain, PID juga mempunyai kelemahan yaitu timbulnya lonjakan yang relatif besar dan waktu pencapaian kondisi tunak yang relatif lama' Berdasarkan kelemahan-kelemahan tersebut' ditawarkan sebuah sistem pengendali berbasis logika
kabur untuk mengatasi kelemahan sistem kendali PID' Pengendali logi[a kabur . yang tidak .memerlukan rnoi*t analisis telah terbukti memiliki banyak keungulan (Abadi, dkk: 2004), tetapi kineda f"nglnOufi l'ogika kabur sangat bergantung pada k"uitiun dan peng4laman seorang pakar dalam menentukan aturan-aturan dan fungsi keanggotaan' Hal ini dikarenakan karena seorang pakar telah seringkali atau banyak melak"ukan percobaan'
Untuk menghindari penelitian yang dilakukan secara coba-coba, Takagi Sugeno Kang pada tahun 1985 memperkenalkan sebuah metode penalaran logika kabui yang lebih cocok untuk analisa secara mltematis, dan d[ebut sebagai metode Sugeno' Pada metode Mamdani, baik input (antecedent) maupun output (consequent) sistem berupa himpunan kabur' sedangkan pada metode Sugeno, outputnya tidak berupa himpunan kabur melainkan berupa konstanta tegas atau Persamaan linear. Keuntungan yang dif,eroleh dari penalaran logika kabur metode Sugeno adalah komputasinya lebih cepat dan efisien, bekerja paling baik untuk teknik-teknik linear seperti kendali bto, Uefe4a paling baik untuk teknik optimasi, dan lebih cocoi untuk. analisa atau pendekatan sistem secara matematis.
Berdasarkan uraian tersebut di atas, permasalahan yang dlajukan dalam. tulisan ini adalah tagaimana rancangan pengendali logika kabur yang
daiat menggantikan. blok Proportional Integral Derivative PSS?
B. Tinjauan Pustaka
Suatu sistem tenaga listrik akan kehilangan kestabilan apabila tidak memiliki peredaman atau dikarenakan iorsi sinkronisasi yang tidak mencukupi' Kondisi ketidakstabilan yang tidak segera diatasi akan mengakibatkan kualitas layanan {an stabilitas Oinamit< sistem menjadi terganggu bahkan dapat mengakibatkan kelelahan poros generator yang pada akhiinya akan memperpendek usia . pakai dari peralatan tersebut. Oleh sebab itu diperlukan sebuah ,irtrt pengendali untuk mengatur redaman osilasi sehingga sistem senantiasa berada dalam kondisi stabil,
rg
td II Ll F T r$ I I fia
E dumpan balik LV, , transformator, dan ransmisi, seperti ditunjukkan pada gambar 1'
[image:5.612.307.560.31.225.2]I
Gambar l. Sistem kendali pada pembangkit
Berdasarkan gambar 6 tersebut dapat diuraikan $fifrngnr berikut: governor yaitu kendali torsi mekanis prrus merupakan masukan bagi generator sedangkan m"lrfi. pada eksitasi merupakan kendali keluaran ,w@cnxtor yang disalurkan ke beban. Bila terjadi . minhan kecil pada beban maka kendali eksitasi ini mur{rungsi sebagai umpan balik untuk mencapai umrnbangan yang baru. Governor mempunyai rillmrcn
-"-ang lambat bila dibandingkan dengan kendali ,ffimsi yang mempunyai" respon cepat sehingga lDliimr pembahasan kestabilan dinamik respon Eu'd€rror diabaikan.
Dinamika sistem tenaga listrik adalah uqnrdinya perubahan-perubahan kecil pada beban qmw menyebabkan perubahan kecepatan sudut rotor Srmerator dan tegangan terminal generator. Kecepatan tmur rotor dan tegangan terminal generator akan mtrsar pada nilai-nilai nominalnya. Generator tri:rrnkan stabil apabila terjadi perubahan beban, iuurepatan rotor akan kembali pada kecepatan sinkron ma nilai tegangannya berada pada tegangan nominal ,,iumg diijinkan.
A Sistem Tenaga Single Machine Intinite Bus Plant yang digunakan dalam perancangan ini nilt*,&h sebuah sistem single machine infinite bus Shm) dengan sebuah mesin generator tunggal trnubung pada bus tak terhingga. Sebuah model frhflB dengan generator, arus jangkar I, tegangan unminal V1, tegangan bus tak hingga Vo, impedansi mfilmn transmisi Z, dan admitansi beban local Y dimrnjukkan pada gambar 2.
JPMS, EdisiTahun Xl, No. 1, Juni 2006
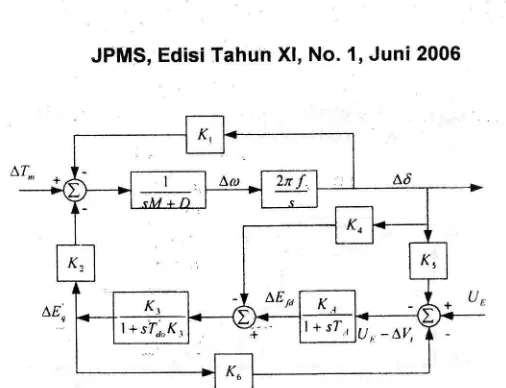
Gambar 2. Blok diagram fungsi alih sebuah mesin sinkron terhubung bus terhingga
Diagram fungsi alih pada gambar 2 tersebut terdapat 2 simpul utama yaitu simpul mekanis dan
simpul elektris. Perubahan
torsi(LTm - LTe) digunakan sebagai masukan dan sudut torsi sebagai keluaran, Simpul mekanis mempunyai dua buah blok fungsi alih, yaitu blok pertama yang 'didasarkan pada persamaan kesetimbangan torsi dan blok kedua menunjukkan hubungan kecepatan sudut rotor. Dalam simpul elektris, masukanirya adalah M,,,, dan sebagai keluarannya adalah Aeo . Blok ini terdiri dari fungsi alih yang menggambarkan rangkaian medan yang dipengaruhi oleh reaksi jangkar dan penguatan K3. Sinyal elektris ini mempunyai kontrol tambahan UE dikurangi perubahan , tegangan terminal Vt sebagai masukan dan perubahan internal Aeu sebagai keluaran.
Adanya perubahan beban mengakibatkan perubahan besar reaksi jangkar generator sinkron yang besarnya dinyatakan sebagai Ko.Diagram blok reaksi jangkar tersebut ditunjukkan pada gambar 3. Perubahan beban tersebut akan akan menimbulkan perubahan fluk bocor dan melalui K2 akan menghasilkan torsi elektrik yang terdiri dari torsi sinkronisasi dan torsi redaman. Besar torsi sinkronisasi dari gambar 3 dinyatakan:
&
At r{ffi+(l+s[J(+s{f,)
-ffifi$sfi
. . . ( l )Berdasarkan persamaan (l) torsi sinkronisasi dan torsi redaman dapat dinyatakan:
: t* h t t -I K , t . r t ;
K t -I + s l n K.
1 7 6
[image:6.612.47.563.5.755.2] [image:6.612.38.276.19.211.2]*='t^{*ffitil*hl
(3)
Gambar 3. Blok diagram reaksijangkar akibat perubahan beban
Perubahan beban selain menyebabkan adanya perubahan besar reaksi jangkar juga akan mengakibatkan terjadinya perubahan tegangan terminal yang besarnya dinyatakan sebagai Ks seperti yang ditunjukkan pada gambar 4. Tegangan yang berubah juga menyebabkan terjadinya perubahan fluk bocor dan Kr-akan menimbulkan torsi {" dan I,r. Besar nilai torsi sinkronisasi dan redaman dari gambar 14 dapat dinYatakan:
Torsi elektrik ini terdiri dari torsi sinkronisasi dan torsi redaman yang masing'masing dapat dinyatakan sebaeai:
JPMS, EdisiTahun Xl, No. 1, Juni z0oo
Gambar 4, Blok diagram perubahan tegangan terminal akibat perubahan beban,
Sistem akan stabil apabila jumlah torsi sinkronisasi dan torsi redaman bernilai positil sehingga jika salah satu atau keduanya berharga negatif maka sisitem menjadi tidak stabil. Dua besaran ini dipengaruhi oleh nilai-nilai
Tdo,To,TA,K A,Krs I dKu, dimana nilai-nilai tersebut sangat tergantung pada kondisi pembebanan sistem.
Kondisi yang sering terjadi pada saat beban puncak adalah nilai:Ks .berharga negatif sedangkan
K yang lain bernilai positif. 4t yung bernilai positif akan menstabilkan sistem yang mempunyai delta kecil, sebaliknya torsi redaman yang bernilai negatif akan menjadikan'sistem menjadi tidak stabii. Permasalahan ini sebenamya dapat diatasi dengan dengan memperkecil penguatan AVR, namun karena penguatan ini digunakan untuk membangkitkan torsi sinkronisasi yang besar maka metode tersebut tidak dilaksanakan.
3. Power System Stabilizer
Blok diagram power system stabilizer terdiri dari rangkaian washout dan kompensator seperti ditunjukkan pada gambar 5. Rangkaian washout diperlukan untuk mengeleminasi bias pada kondisi mantap keluaran PSS, sedangkan kompensator diberikan untuk derajat mendahului (lead).
p c Q
Gambar 5. Blok diagram PSS
' t
m rMm
I iril
&
1[
rt
i@
l.
iff
.(4)
6,
A
[br
I + sI..,
| + sTnoK ,
T* merupakan konstanta waktu washout, Kc reempakan penguat PSS, T1 dan Tz merupakan konstanta waktu derajat lead, Latmerupakan sinyal masukan untuk PSS berupa perubahan kecepatan rc'tor, dan Us merupakan sinyal keluaran PSS yang ,iimasukan ke dalam sistem eksitasi sebagai sinyal :ambahan (supplementary control). Menurut Yu .1983), prosedur mendesain dari PSS adalah sebagai herikut:
t Menentukan alndari loop mekaniknya sendiri. Dengan mengabaikan peredaman' persamaan loop mekanisnya dapat ditulis:
'--t,1s2 + atu Krl=0
Dan solusinya adalah: s = * ( D r i @ n =
JPMS, EdisiTahun Xl, No. 1, Juni 2006
lead (yang mendahului) diberikan oleh sebuah blok kompensasi yaitu sekitar 34o untuk s :j2nradls sama.dengan 1 Hz.
Mendesain sebuah penguat K" untuk eksitasi tambahan.
Untuk mendesain kontrol eksitasi ini, D* dan D diabaikan. Sebuah pilihan yang layak untuk koefisien ' redaman -'{, dari persamaan karakteristik yang dinormalisasikan berkisar 0,1 sampai 0,3 p.u. Pengabaian Drdan D, akan diperoleh:
D,, =2(,at,M
Dengan demikian diperoleh:
K c = 2{,at,M (t2)
rc.rlc,.(i
at,\lc
,,(i, ^\
e. Mendesain sebuah blok reset untuk ?.1'
Kontrol eksitasi tambahan akan bekerja hanya apabila osilasi ,.frekwensi rendah mulai berkembang dan secara otomatis akan berhenti bila sistem berhenti berosilasi. Hal ini tidak akan berpengaruh,'lterhadap fungsi normal eksitasi selama operasi stabil pada frekwensi sistem. Oleh karena itu 'suatu blok reset dibutuhkan, yang kemunskinan berbentuk:
d .
rsi
rif.
rya
ha i|ai hrt hn
krn b. Menentukan
sudut ketinggalan fasa lG,
u,,dan e, dari loop elektris. Fungsi alih
uodan eq, memasukkan pengaruh umpan
Kuyakni:
antara antara balik ;itif
dta
pf Iti. E n
tcll
rsi
i|r
K nKt c
u u =
s I
u H r , s l , l = , * , , - ( 1 4 )
diri
lrt: n$
dfu;r
Itr
jy D
c. Mendesain kompensasi sudut fasa lead untuk sudut fasa /ag (ketinggalan) lGr'. Bila La dipilih sebagai masukan tarnbahan eksitasi, maka akan diperoleh:
l G r , + l G u - 0 ; l G o ( 0 . . . " . . . ( 1 0 )
Kompensasi sudut fasa lead (yang mendahului) dapat direalisasikan dengan memakai op-amp dan fungsi alih yang paling sederhana dapat dipilih dalam bentuk:
r t k
G - = l l n t T i I d i m a n a k : I a t a u 2 , 7 , > r,..'.'.-.(ll) ' [ + s r , I
Ada batas sudut fasa agar sebuah blok kompensasi dapat ditetapkan dan Z, tidak bisa terlalu kecil. Sebagai contoh untuk Tz=0,2secon dan Tr =10T2, dan sudut fasa
f. Menganalisis nilai eigen pada sistem (sistem dengan sinyal tambahan dan sistem tidak dengan sinyal tambahan u,. ).
4. Kendali Proportional Integral Derivative
(PrD)
1'r8
galat yang mendekati nol. Persamaan kendali dengan aksi gabungan itu diberikan oleh persamaan:
JPMS, EdisiTahun Xl, No. 1, Juni 2006
perancang mengetahui data kuantitatif tentang hubungan masukan dan keluaran seperti yang diperlukan dalam metode konvensional. Metode pengaturan dengan logika kabur merupakan metode pengaturan yang menyamakan cara berpikir manusia dengan melibatkan ketidakpastian pada sistem fisik. Pengendali kabur membuat keputusan sebagai sinyal atur berdasarkan masukan dan keluaran yang telah terjadi dalam bentuk variabel linguistik dengan menggunakan aturan yang dijabarkan secara umum dalam bentuk:
Jika e dan de, maka u
e : kesalahan keluaran sistem
de : perubahan kesalahan keluaran sistem u : sinyal atur pengendali kabur
Aturan yang disusun pada sistem pengendali kabur bersifat bebas asalkan menjamin konsekwensi logis dari hubungan antar variabel yang terlibat. Struktur logika kabur yang digunakan dapat digambarkan seperti ditunjukkan dalam gambar 7.
[image:8.612.35.277.59.187.2] [image:8.612.37.284.320.529.2]dAco
Gambar 7: Struktur pengendali FPIDPSS
C. Perancangan Kendali Logika Kabur Sebagai Pengganti PIDPSS
Data yang akan digunakan sebagai pijakan dalam perancangan kendali logika fuzzy untuk meningkatkan kendali PID ini merujuk pada data buku Electric Power System Dynamic (Yu, 1983). yaitu:
Generator : M : 9,26; T' 6o: 7,76; D = 0; X 6 = 0 , 9 7 3 I x'd = 0,190 ; xo: 0,550
Sistem Eksitasi : Kn: 50; Ta:0,05 Saluran transmisi dan beban :R = -0,034
X = 0,997:' B = 0,262 Kondisi Awal : Pro: 1,0 ; Qro = 0,015 ;
V,o = 1,05
Berdasarkan data tersebut maka diperoleh nilai: Kr : 0,5442; Kz = 1 ,212;Kt = 0,6584; Kq= 0,'7037 I K:: -0,0945 ; dan Ko = 0,815, dan parameter PSS adalah T = 3,0; Tr : 0,6581i Tz = 0,1 i Kc = 7,0911.
sd
ffi
ry
u(t)
= y,"1,,
*
f' I"tt'tat
* x,r,
#
ll
dimana , K, : penguatan proporsional; -Ti = waktu integral;
r, = waktu turunan
Kendali proportional akan memberikan efek mengurangi waktu naik, tetapi tidak menghilangkan kesalahan keadaan tunak. Kendali integral akan memberikan efek menghilangkan kesalahan keadaan tunak, tetapi berakibat memburuknya respon transient. Kendali derivative akan mernberikan efek meningkatnya stabilitas sistem, mengurangi overshoot, dan menaikkan respon transfer.
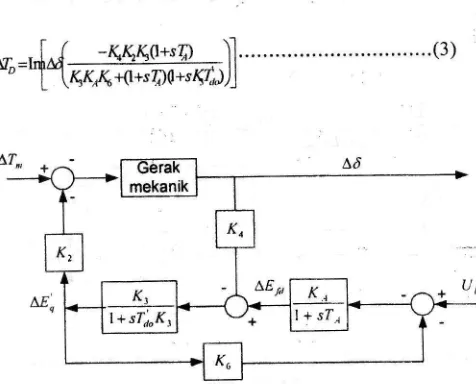
Diagram fungsi alih dari sinyal PIDPSS dapat dinyatakan seperti pada gambar 6.
Gambar 6. Blok diagram PIDPSS
5. Pengaturan dengan Logika Kabur
Rancangan pengaturan dengan metode konvensional menghadapi permasalahan penurunan model matematik dalam mendeskripsikan sistem sehingga memerlukan pemahaman yang mendalam mengenai proses fisis dinamika sistem beserta variabel-variabel yang terlibat. Metode tidak selalu mudah terlebih lagi jika sistem sangat kompleks dan rumit.
Rancangan pengaturan dengan logika kabur meliputi pemodelan sistem secara kabur yang menyangkut hubungan masukan dan keluaran dan sekaligus mengumpulkan banyak parameter sistem secara bersama-sama. Pengaturan berbasis logika kabur memberikan model peranoangan baru yang sangat berguna bagi sistem yang kompleks tanpa
Aro
fr
{t rrd
EI !l
"{il {
.01
G
,
G : N ) A gv t z t r
{
:n9
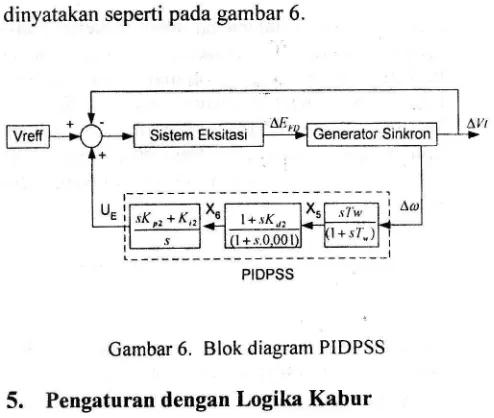
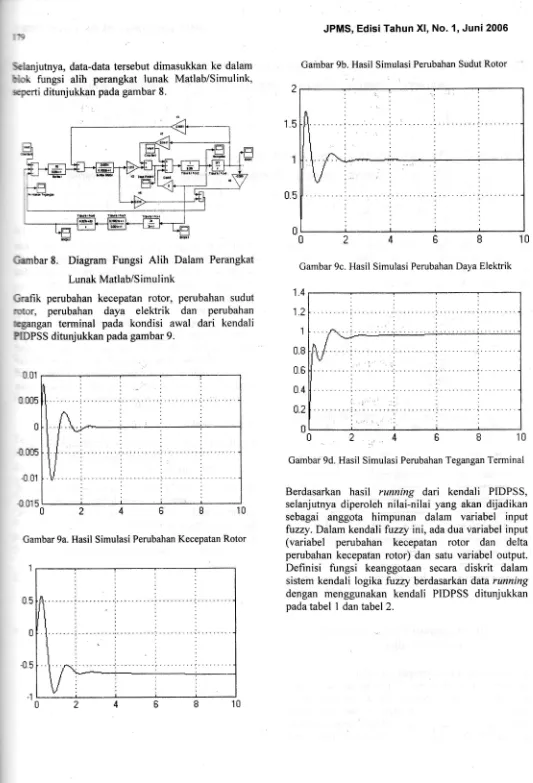
Selenjutnya, data-data tersebut dimasukkan ke dalam biok fungsi alih perangkat lunak Matlab/Simulink, scperti ditunjukkan pada gambar 8.
Cmrbar 8. Diagram Fungsi Alih Dalam Perangkat
Lunak Matlab/Simulink
Grafik perubahan kecepatan rotor, perubahan sudut ruor, perubahan daya elektrik dan perubahan bgangan terminal pada kondisi awal dari kendali PIDPSS ditunjukkan pada gambar 9.
[image:9.612.34.567.24.807.2] [image:9.612.315.562.40.477.2]JPMS, EdisiTahun Xl, No. 1, Juni 2006
Gambar 9b. Hasil Simulasi Perubahan Sudut Rotor
1 5
0 5
1 0
Gambar 9c. Hasil Simulasi Perubahan Daya Elektrik
0 2 4 6 S 1 0
Gambar 9d. Hasil Simulasi Perubahan Tegangan Terminal
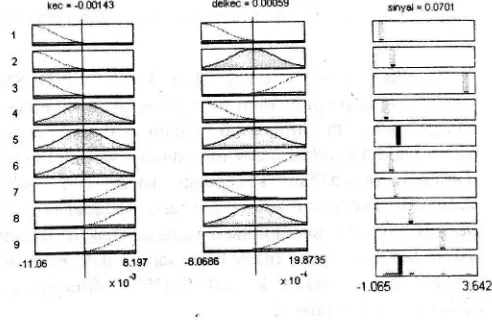
Berdasarkan hasil running dari kendali PIDPSS, selanjutnya diperoleh nilai-nilai yang akan dijadikan sebagai anggota himpunan dalam variabel input fuzzy. Dalam kendali fuzzy ini, ada dua variabel input (variabel perubahan kecepatan rotor dan delta perubahan kecepatan rotor) dan satu variabel output. Definisi fungsi keanggotaan secara diskrit dalam sistem kendali logika fuzry berdasarkan data running dengan menggunakan kendali PIDPSS ditunjukkan padatabel 1 dan tabel 2.
1 . 4
1 . 2
1
0.01
om5
0
{.m5
{ 0 1 {.015
0.s
0.6
0 4
0.2
10
Gambar 9a. Hasil Simulasi Perubahan Kecepatan Rotor
: :
1 ' " " ' : " " " "
t ' t .t :
t :
' { , - " "'r " " " ' I
t
[ : t : ' ' t /\:
l / \ ' +
l / :
\ / i
-0.011057 -0.008169 .0.004318 -0.00143 0.0014s8 0.005309 )-008197
P 0 0 0 0 0,3 i 1 I
7r 0 0,3 0,7 1 o 7 0,3 0
N I 4.7 0,3 0 0 0 0
[image:10.612.43.583.37.789.2]JPMS, Edisi Tahun Xl, No. 1, Juni 2006
u
1 8 0Tabel 1. Definisi Fungsi Kenggotaan untuk Variabel Input Aar
Tabel2. Definisi Fungsi Kenggotaan untuk Variabel Input dLa
Selanjutnya, dari definisi fungsi keanggotaan tersebut di atas kemudian disusun "fruty rule yang menghubungkan besaran masukan dan keluaran, seperti ditunjukkan pada tabel 3.
Tabel3. Susunan
Fuzzy
Rule
N
Z
PN
M F 1
MF4
MF7
Z
MF2
MF5
MF8
P
MF3
MF6
MF9
Visualisasi susunan fuzzy rule tersebut di atas dalam Matlab/Simulink ditunjukkan pada gambar 10.
f:----*-l
[---]
r---l
m
tr---l
t-:---l
t-.---___l
t--l---_--1
l---:-l
n : . ' _ ]
1 0€5 3.64?
Gambar 10. Visualisasi
Fuzzy Rule dalam
Matlab/Simulink
Tahap
akhir dari perancangan
kendali
fuzzy ir'i adalah
mengimplementasikan hasil rancangan ke dalam perangkat lunak simulink guna melihat hasil responnya. l{asil yang diharapkan dari rancangan sisiem kendali fuzzy yang berfungsi menggantikan kendali PIDPSS ini adalah kinerja sistem yang
semakin meningkat yang salah satunya ditunjukkan dengan waktu osilasi perubahan kecepatan rotor, perubahan sudut rotor, perubahan daya elektrik dan perubahan tegangan terminal yang semakin cepat. D. Kesimpulan
Berdasarkan ura,ian dari pembahasan tersebut dapat disimpulkan bahwa sistem kendali fuzzy dapat digunakan dan diimplementasikan sebagai pengganti kendali Proportionol Integral Derivative Power System Stabilizer pada sistem eksitasi' Kinerja dari kendali fuzzy ini sangat dipengaruhi oleh ketepatan susunan fungsi keanggotaan dan pembobotannya. Daftar Pustaka ' '
Abadi, A. M. (2004 )., Koor din as i P en gendal i Eks it qs i dan Governor. D engan Menggunakan Logika Fuzzy. Laporan BBI.
Brunelle, Patrice. (2000). Power System Blockset. Canada: Teqsim lnternastional.
Saadat, Hadi. (1999). Power System Analysis. Singapore: McGraw-Hill Co
Yao-nan Yu, ( I 983). Electric Power System Dynamics" New York: Academic Press.
-rll
u
{
nr
L G
F
3t
u
m
K!
Ih
u
,lh d
,fu
g lE
pr
sCI
K,
* ) -0.000807 -0.000539 -0.000181 0.000088 0.000346 0.000691 0.000950
P 0 0 0 0 0,3 0.7
7, 0 0,3 0 ; l 0.1 0,3 0
[image:10.612.40.286.432.599.2]