commit to user
SISTEM PEMANTAUAN KETINGGIAN AIR
BERBASIS MIKROKONTROLER AT89S51
TUGAS AKHIR
Diajukan Untuk Memenuhi Salah Satu Syarat Mencapai Gelar Ahli Madya Program Diploma III Ilmu Komputer
Diajukan oleh :
MUSTIKA AYU PERMATA NIM. M3308019
PROGRAM DIPLOMA III ILMU KOMPUTER
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SEBELAS MARET
commit to user
HALAMAN PERSETUJUAN
SISTEM PEMANTAUAN KETINGGIAN AIR
BERBASIS MIKROKONTROLER AT89S51
Disusun Oleh
MUSTIKA AYU PERMATA
NIM. M3308019
Tugas Akhir ini telah disetujui untuk dipertahankan Di hadapan dewan penguji
commit to user ABSTRACT
MUSTIKA AYU PERMATA. M3308019. WATER LEVEL MONITORING
BASED ON MIKROKONTROLER AT89S51. Final Project D3 Computer Sience
Program Surakarta: Faculty of Mathematics and Natural Sciences, University of Sebelas Maret Surakarta, 2011.
This final report explains designing a water level monitoring system that based on microcontroller AT89S51 used ultrasonic wave. It is important to build the system because many disasters are caused by water, such as flood, tsunami, etc.
SRF04 sensor is used the echo sounder principle to detect the water level. The time duration for transmitting and receiving the ultrasonic wave is multiplied by the sound velocity in the water to get the spacing point. It is done by assembly program that is stored in microcontroller memory.
The result of water level is display on LCD and transmits to the receiver the
system uses wireless FM and uses speakers for sound indicators.
commit to user INTISARI
MUSTIKA AYU PERMATA. M3308019. SISTEM PEMANTAUAN
KETINGGIAN AIR BERBASIS MIKROKONTROLLER AT89S51. Tugas
Akhir, Surakarta: Fakultas Matematika dan Ilmu Pengetahuan Alam, Universitas Sebelas Maret Surakarta, 2011.
Tugas Akhir ini menjelaskan tentang bagaimana membuat suatu sistem pemantauan ketinggian air dengan memanfaatkan gelombang ultrasonik berbasis mikrokontroler AT89S51 Hal ini perlu dilakukan mengingat banyaknya bencana alam yang disebabkan oleh air, seperti banjir dan tsunami.Sensor
SRF04 dengan memanfaatkan prinsip pantulan suara digunakan untuk mengukur ketinggian air. Selang waktu yang diperlukan untuk memancarkan dan menerima pantulan gelombang ultrasonik dikalikan dengan cepat rambat suara dalam air guna memperoleh nilai jarak. Hal ini dilakukan oleh program assembly yang disimpan
dalam memori mikrokontroler.
Hasil ketinggian air yang diperoleh ditampilkan pada LCD dan dikirim ke penerima menggunakan wireless FM dan menggunakan bel/speaker untuk indikatornya.
commit to user
KATA
PENGANTARRasa syukur dan pujian tertinggi hanyalah untuk Allah SWT yang telah melimpahkan rahmat-Nya dan karunia-Nya kepada alam semesta. Shalawat dan salam penulis ucapkan untuk Nabi Muhammad SAW yang telah menyempurnakan
kemuliaan akhlak dan melepaskan umat manusia dari segala bentuk kejahiliahan.
Alhamdulillah, penulis telah menyelesaikan penulisan Tugas Akhir yang berjudul
“Sistem Pemantauan Ketinggian Air BerbasisMikrokontroler AT89S51”. Dalam
penyusunan Tugas Akhir ini, penulis mendapatkan banyak bimbingan dan bantuan dari berbagai pihak. Secara khusus, penulis mengucapkan terima kasih kepada Bapak
Drs. Syamsurizal yang telah membimbing penulis dalam penulisan Tugas Akhir ini. Selanjutnya penulis juga mengucapkan terima kasih kepada:
1. Bapak Drs. Y. S. Palgunadi, M.Sc, selaku Ketua Program Diploma III Ilmu Komputer Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sebelas Maret Surakarta.
2. Keluarga yang telah memberikan dukungan dan dorongan baik mental maupun materi.
3. Teman – teman Teknik Komputer 2008. 4. Semua pihak yang telah membantu.
Penulis berharap semoga karya sederhana ini dengan segala kekurangannya dapat memberikan manfaat bagi pembacanya.
Boyolali, Juni 2011
commit to user
DAFTAR TABEL
Tabel 1. Kecepatan Bunyi Berbagai Macam Bahan……… Tabel 2. Fungsi PIN LCD……… Tabel 3. Hasil pengukuran jarak dengan sensor ultrasonik SRF04. Tabel 4. Perbandingan Pengukuran Jarak………
commit to user
DAFTAR GAMBAR
Gambar 1. Bentuk Fisik SRF04 Davantech ……….. Gambar 2. Kaki IC AT89S51 ………...
Gambar 3. Bentuk fisik LCD 2x16 karakter……….. Gambar 4. Diagram Blok Umum Sistem………..…
Gambar 11. Diagram Alir cara Kerja Sensor Ketinggian Air………… Gambar 12. Rangkaian Catu Daya 5V/1A dan 9V/1A DC………
commit to user BAB 1
PENDAHULUAN
1.1 Latar Belakang Masalah
Musibah dan bencana alam yang banyak terjadi belakangan ini tidak hanya
menyebabkan kerugian material saja, tetapi juga mengakibatkan banyaknya korban jiwa yang berjatuhan. Banyak cara untuk mengantisipasi dan meminimalisasi kerugian dan jumlah korban, salah satunya adalah dengan menerapkan berbagai alat pendeteksi yang digunakan sebagai indikator dari suatu peringatan dini, bila terjadi fenomena alam yang tidak biasa.
Saat ini terdapat banyak alat pendeteksi yang digunakan sebagai indikator sistem peringatan dini untuk mendeteksi berbagai macam fenomena alam (fisik), seperti perubahan iklim dan cuaca (arah dan kecepatan angin, curah hujan, temperatur ), kekuatan dan lokasi dari pusat gempa, aktivitas dari gunung berapi, ketinggian permukaan air, dan lain sebagainya. Ketinggian permukaan air merupakan suatu
parameter yang banyak dipantau dan dianalisa perubahannya, terutama pada musim dan keadaan tertentu. Hal ini berkaitan erat dengan banyaknya bencana alam yang mungkin disebabkan olehnya, seperti banjir, tsunami dan lain sebagainya. Selama ini pemantauan ketinggian air sungai yang dilakukan masih menggunakan alat-alat
manual berupa skala ketinggian air yang diletakkan di pinggiran sungai. Hal ini memiliki keterbatasan dalam mengetahui ketinggian air dari atas sungai.
Mengingat akan pentingnya pemantauan terhadap ketinggian air sungai, penulis mencoba merancang dan membuat sistem pemantauan ketinggian air secara elektronik
yang dapat digunakan untuk memantau perubahan ketinggian air. Dengan memanfaatkan sensor ultrasonik sebagai detektor guna mendeteksi jarak. Sensor ini bekerja berdasarkan prinsip pantulan gelombang suara, dimana sensor memancarkan gelombang suara yang kemudian menangkapnya kembali dengan perbedaan waktu
commit to user
diharapkan dapat menjadi suatu cara alternatif untuk memantau ketinggian air sungai/ waduk, guna mengantisipasi dan peringatan dini terjadinya bencana banjir.
1.2 Perumusan Masalah
Dari latar belakang yang telah diungkapkan diatas diperoleh beberapa permasalahan, diantaranya adalah sebagai berikut:
1. Bagaimana membuat alat otomatis untuk mengukur ketinggian air dengan menggunakan rangkaian elektronik.
2. Bagaimana mengolah hasil yang didapatkan antara sensor yang diolah mikrokontroler yang menghasiLkan output berupa LCD (Display) dan Bel (Alarm) dengan perantara wireless FM.
1.3 Batasan Masalah
Sistem pemantauan ketinggian air yang dibahas pada penelitian ini, merupakan
prototype suatu cara alternatif untuk memantau ketinggian air dengan memanfaatkan
gelombang ultrasonik (sensor SRF04) dan mikrokontroler sebagai media utamanya.
Sistem ini hanya diimplementasikan pada kondisi air tawar yang jernih dan tenang dengan ketinggian kurang dari 0,74 m.
1.4 Tujuan dan Manfaat
Tujuan yang ingin dicapai dalam penelitian ini adalah sebagai berikut :
1. Merancang perangkat keras dan perangkat lunak yang dapat mentransmisikan data melalui wireless FM dan output berupa bel/alarm.
2. Merancang perangkat lunak untuk meghasilkan dan mengolah hasil sensor guna
mendapatkan output berupa nilaiketinggian air.
Sedangkan manfaat yang diperoleh dari penelitian ini adalah :
1. Bagi Instansi Pemerintah dapat memantau ketinggian air sungai dengan mudah tanpa harus turun ke sungai untuk melihat ketinggian air dari alat manual pengukur
commit to user menggunakan LCD.
2. Sebagai alat antisipasi / peringatan dini jika akan terjadi banjir.
1.5 Metodologi Penelitian
1. Studi Literatur
Pada metode ini mempelajari teori-teori dasar yang menunjang, yaitu tentang
gelombang ultrasonik,sensor SRF04, mikrokontroler, LCD dan wireless FM. 2. Perancangan dan Pembuatan Hardware
Pada metode perancangan hardware, dirancang rangkaian sesuai dengan fungsi dari masing-masing blok sistem, yang terdiri atas transduser ultrasonik (sensor SRF04), mikrokontroler, penampil (LCD), dan keluaran berupa bel/alarm yang
menggunakan system pemancar dan penerima wireless FM. 3. Perancangan dan Pembuatan Software
Pada metode perancangan sofware dirancang 1 buah program yang akan diinputkan pada mikrokontroler dengan menggunakan bahasa pemrograman assembly
MCS51, yaitu program pada gelombang ultrasonik dan mengolah hasil pantulan yang
diterima menjadi nilai jarak yang kita inginkan, serta menampikan hasilnya pada LCD dan alarm/bel sebagai indikator bunyi.
4. Pengujian Masing-masing Blok dan Keseluruhan Sistem
Pada metode ini dilakukan pengujian terhadap masing-masing blok dan
keseluruhan sistem yang diperoleh pada penelitian. 5. Penyusunan Laporan
Metode ini merupakan proses akhir dari penelitian, yang meliputi penjelasan hasil penelitian yang diperoleh sesuai dengan metode dan prosedur yang digunakan dalam
perancangan dan pengujian sistem, penarikan kesimpulan, dan pemberian saran dalam bentuk laporan.
1.6 Sistematika Penulisan
commit to user
bab memiliki sub bab tersendiri. Adapun sistematika penulisannya adalah sebagai berikut:
Bab 1 Pendahuluan
Berisi latar belakang, perumusan masalah, batasan masalah, tujuan dan manfaat,
metodologi perancangan, dan sistematika penulisan. Bab 2 Tinjauan Pustaka
Berisi teori tentang gelombang ultrasonik, sensor SRF04 Davantech, mikrokontroler, LCD,wireless FM.
Bab 3 Desain Dan Perancangan
Membahas perancangan sistem secara umum, perancangan hardware (perangkat keras), serta perancangan software (perangkat lunak).
Bab 4 Implementasi Dan Analisa
Mengulas tentang hasil implementasi masing-masing blok dan keseluruhan sistem yang diperoleh pada penelitian, serta menganalisa sistem.
Bab 5 Penutup
Merupakan kesimpulan dan saran terhadap hasil yang diperoleh; Daftar Pustaka, berisi daftar buku referensi dan alamat browser yang berhubungan dengan perancangan dan pembuatan system pemantau ketinggian air.
Lampiran
Berisi foto alat yang dihasilkan dan gambar rangkaian pembeda suara busser.
BAB II
LANDASAN TEORI
commit to user
perancangan sistem. Agar pembahasan tidak menyimpang dari topik utama, maka setiap komponen hanya dibahas sesuai dengan fungsinya pada masing-masing blok
sistem Penjelasan tentang teori dasar komponen ini diharapkan dapat memberikan pemahaman terhadap prinsip kerja dari sistem tersebut.
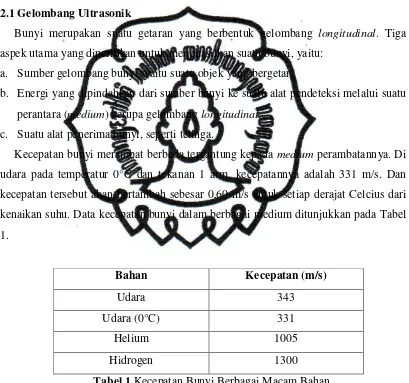
2.1 Gelombang Ultrasonik
Bunyi merupakan suatu getaran yang berbentuk gelombang longitudinal. Tiga aspek utama yang diperlukan untuk menghasilkan suatu bunyi, yaitu:
a. Sumber gelombang bunyi, yaitu suatu objek yang bergetar.
b. Energi yang dipindahkan dari sumber bunyi ke suatu alat pendeteksi melalui suatu perantara (medium) berupa gelombang longitudinal.
c. Suatu alat penerima bunyi, seperti telinga.
Kecepatan bunyi merambat berbeda tergantung kepada medium perambatannya. Di udara pada temperatur 0°C dan tekanan 1 atm, kecepatannya adalah 331 m/s. Dan kecepatan tersebut akan bertambah sebesar 0,60 m/s untuk setiap derajat Celcius dari kenaikan suhu. Data kecepatan bunyi dalam berbagaimedium ditunjukkan pada Tabel
1.
commit to user
menerima frekuensi antara 20 Hz sampai 20.000 Hz (dengan 1 Hz adalah 1 putaran per sekon). Gelombang bunyi dengan frekuensi di atas 20.000 Hz disebut ultrasonik.
Bunyi-bunyi tersebut dapat didengar oleh beberapa hewan, seperti: anjing dapat mendengar frekuensi 50.000 Hz, dan kelelawar yang dapat mendeteksi frekuensi sekitar 100.000 Hz. Sedangkan frekuensi di bawah 20 Hz disebut infrasonik. Suara-suara tersebut dapat dihasilkan oleh gempa bumi, halilintar, gunung meletus, dan
gelombang yang disebabkan oleh getaran mesin-mesin berat.
Sensor Ultrasonik bekerja berdasarkan prinsip pantulan gelombang suara, dimana sensor ini memancarkan gelombang suara yang kemudian menangkap pantulannya kembali dengan perbedaan waktu sebagai dasar penginderaannya. Perbedaan waktu antara gelombang suara dipancarkan dengan ditangkapnya kembali gelombang suara
tersebut adalah berbanding lurus dengan jarak atau tinggi objek yang memantulkannya. Jenis objek yang dapat diindera diantaranya adalah: objek padat, cair, butiran maupun tekstil (Afdhal, 2006).
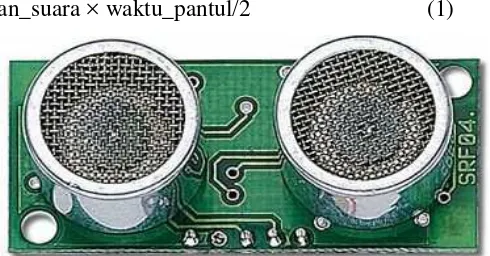
2.2SRF04 Davantech Ultrasonic Range Finder
SRF04 adalah sensor non-kontak pengukur jarak menggunakan ultrasonik. Prinsip kerja sensor ini adalah transmitter mengirimkan seberkas gelombang ultrasonik, lalu diukur waktu yang dibutuhkan hingga datangnya pantulan dari obyek. Lamanya waktu ini sebanding dengan dua kali jarak sensor dengan obyek, sehingga jarak sensor
dengan obyek dapat ditentukan persamaan (1).
jarak = kecepatan_suara × waktu_pantul/2 (1)
commit to user
Adapun spesifikasi teknis Devantech SRF04 Ultrasonic Range Finder: 1. Tegangan : 5 VDC
2. Konsumsi Arus : 30 mA (rata-rata), 50 mA (max) 3. Frekuensi Suara : 40 kHz
4. Jangkauan : 3 cm - 3 m
5. Sensitivitas : Mendeteksi benda berdiameter 3 cm dalam jarak > 2 m
6. Input Trigger : 10 mS min.
7. Pulsa Echo : Sinyal level positif, lebar berbanding proporsional dengan jarak yang dideteksi
SRF04 dapat mengukur jarak dalam rentang antara 3 cm – 3 m dengan output
panjang pulsa yang sebanding dengan jarak obyek. Sensor ini hanya memerlukan 2 pin
I/O untuk berkomunikasi dengan mikrokontroler, yaitu TRIGGER dan ECHO. Untuk mengaktifkan SRF04 mikrokontroler mengirimkan pulsa positif melalui pin TRIGGER minimal 10 µs, selanjutnya SRF04 akan mengirimkan pulsa positif melalui pin ECHO selama 100 µs hingga 18 ms, yang sebanding dengan jarak obyek. Dibandingkan dengan sensor ultrasonik lain, seperti PING, SRF04 mempunyai
kemampuan yang setara, yaitu rentang pengukuran antara 3cm – 3 m, dan output yang sama, yaitu panjang pulsa. Meski cara pengoperasiannya juga mirip, namun kedua sensor tersebut berbeda jumlah pin I/O-nya, yaitu 2 untuk SRF04 dan 1 untuk PING
(Afdhal, 2006).
2.3Mikrokontroler
Mikrokontroler dapat diartikan sebagai sebuah pengendali yang berukuran mikro, yang terlihat hampir sama dengan mikroprosesor, namun memilki beberapa perbedaan diantaranya memiliki banyak komponen yang terintegrasi di dalamnya, seperti RAM,
ROM, I/O Port, dan timer/ counter yang tidak dimiliki oleh mikroprosesor. Namun mikrokontroler hanya dapat melaksanakan tugas-tugas yang lebih spesifik dibandingkan dengan mikroprosesor yang mampu menangani pemrosesan data input
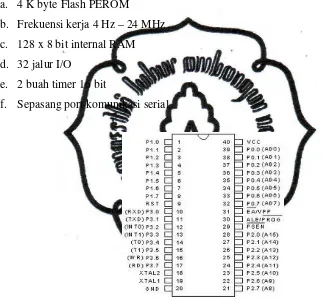
commit to user 2.3.1 Gambaran Umum AT89S51
Mikrokontroler AT89S51 memiliki beberapa keistimewaan antara lain sebagai berikut :
a. 4 K byte Flash PEROM
b. Frekuensi kerja 4 Hz – 24 MHz
c. 128 x 8 bit internal RAM d. 32 jalur I/O
e. 2 buah timer 16 bit
f. Sepasang port komunikasi serial
Gambar 2. Kaki IC AT89S51
Berikut adalah uraian singkat fungsi masing-masing kaki yang terdapat pada
mikrokontroler AT89S51.
1. GND (Ground) atau pentanahan berfungsi sebagai jalur catu negatif atau ground.
2. VCC berfungsi untuk jalur catu daya positif 5V DC untuk mikrokontroler.
3. RST/VPP merupakan jalur reset mikrokontroler dengan transisi rendah ke tinggi,
VPP digunakan sebagai tegangan catu pada saat memprogram mikrokontroler.
commit to user
(A0..A7) ke memori eksternal selama operasi normal. Menerima masukan pulsa program selama pemrograman Flash PEROM internal.
5. PSEN merupakan Program Store Enable dimana keluaran PSEN adalah sinyal kontrol yang mengijinkan atau mengaktifkan program memori eksternal (EPROM eksternal) ke bus data selama operasi normal.
6. EA/VPP (Eksternal Access Enable) adalah untuk pemilihan eksekusi program langsung dari memori eksternal atau dimulai dari memori internal kemudian baru memori eksternal. Kaki ini juga menerima 12,75 V untuk catu daya pemrograman Flash PEROM.
7. XTAL1 merupakan jalur masukan untuk penguat osilator pada mikrokontroler atau masukan sumber pulsa dari luar mikrokontroler.
8. XTAL2 merupakan jalur keluaran dari penguat osilator.
9. P0.1 – P0.7 merupakan port keluaran/masukan (I/O) bertipe open drain bidirectional (tanpa pullup internal). Port 0 dapat dikonfigurasikan sebagai bus alamat/data bagian rendah (low byte) selama proses pengaksesan memori data dan program eksternal.
10. P1.0 – P1.7 merupakan port I/O dua arah. Port 1 juga menerima alamat bagian rendah selama pemrograman.
11. P2.0 – P2.7 merupakan port I/O dua arah. Port 2 merupakan byte alamat bagian
tinggi (high byte) selama pengambilan instruksi dari memori program eksternal
dan selama pemrograman.
12. P3.0 – P3.7 merupakan port I/O dua arah. Port 3 memiliki fungsi-fungsi alternatif, diantaranya menerima sinyal-sinyal kontrol bersama-sama dengan port 2 selama pemrograman.
Mikrokontroler AT89S51 memiliki ruang alamat memori data dan program terpisah. Pemisahan memori program dan data tersebut membolehkan memori data diakses dengan alamat 8-bit, sehingga dapat dengan cepat dan mudah disimpan dan dimanipulasi oleh CPU 8-bit. Memori internal program menempati lokasi 0000h
commit to user
FFFFh. Memori data menempati suatu ruang alamat yang terpisah dari memori program (Belajar Elektronika, 2010).
2.3.2Memori
Memori berfungsi untuk menyimpan suatu infomasi, baik berupa program maupun data. Makin besar kapasitas memori yang dimiliki suatu sistem, maka kemampuannya
untuk menangani suatu program yang lebih kompleks dan mengolah data akan lebih baik. Dalam dunia mikrokontroler dikenal dua tipe memori, yaitu data memory dan
program memory. Pemisahan ini dimaksudkan untuk mempercepat proses kerja
mikrokontroler.
2.3.2.1 Data Memory
Data memory befungsi untuk menyimpan data, terbagi 2 berdasarkan lokasinya,
yaitu internal data memory dan external data memory. Internal sehingga berjumlah
256 bytes. Sedangkan external data memory berupa IC RAM atau ROM yang dapat
ditambahkan hingga 64 KB.
2.3.2.2 Program Memory
Program memory berfungsi untuk menyimpan program, terbagi menjadi 2 lokasi
sama seperti data memory. Hanya saja setiap interupsi memiliki jeda 8 byte terdiri dari
3 timer. Lokasi interupsi pada port serial.
2.3.3 Timer/ Counter
Mikrokontroler AT89S51 yang merupakan salah satu IC keluarga MCS- 51
dilengkapi dengan dua perangkat Timer/ Counter, yang masing-masing dinamakan sebagai timer 0 dan timer 1. Pada dasarnya sarana input yang satu ini merupakan seperangkat pencacah biner (binary counter). Jika pencacah tersebut bekerja dengan frekuensi tetap yang sudah diketahui besarnya, maka dikatakan sebagai timer, karena
commit to user
Namun jika pencacah tersebut bekerja dengan frekuensi yang tidak tetap, maka dikatakan sebagai counter, karena kedudukan pencacah tersebut hanyalah menyatakan
banyaknya pulsa yang sudah diterima pencacah. Pencacah biner pembentuk Timer/Counter MCS51 merupakan pencacahbiner menaik (count up binary counter) yang mencacah dari $0000 sampai $FFFF, saat kedudukan pencacah berubah dari $FFFF kembali ke $0000 akan timbul sinyal limpahan.
Untuk mengakses Timer/ Counter tersebut, diperlukan register khusus yang dikenal sebagai SFR di dalam memori data internal. Pencacah biner untuk Timer 0
dibentuk oleh register TL0 (Timer 0 Low Byte) dan register TH0 (Timer 0 HighByte). Sedangkan pencacah biner untuk Timer 1 dibentuk oleh register TL1 (Timer 1 Low
Byte) dan register TH1 (Timer 1 High Byte). (Nurul Afdhal, 2006)
2.4Liquid Crystal Display (LCD)
LCD merupakan salah satu komponen penting dalam pembuatan tugas akhir ini karena LCD dapat menampilkan perintah-perintah yang harus dijalankan oleh pemakai. LCD mempunyai kemampuan untuk menampilkan tidak hanya angka, huruf
abjad, kata-kata tapi juga simbol-simbol. Jenis dan ukuran LCD bermacam-macam, antara lain 2x16, 2x20, 2x40, dan lain-lain. LCD mempunyai dua bagian penting yaitu
backlight yang berguna jika digunakan pada malam hari dan contrast yang berfungsi
untuk mempertajam tampilan (Petra, 2009).
commit to user
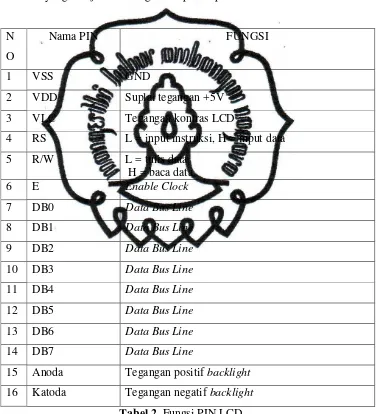
Berikut Tabel yang menjelaskan fingsi setiap kaki pada LCD :
N
15 Anoda Tegangan positif backlight
16 Katoda Tegangan negatif backlight
Tabel 2. Fungsi PIN LCD
Fungsi dari masing – masing pin pada LCD adalah pin pertama dan kedua
commit to user
ditambahkan resistor variabel 4K7 atau 5K ke pin ini sebagai pengatur kontras tampilan yang diinginkan. Pin keempat berfungsi untuk memasukkan input command
atau input data, jika ingin memasukkan input command maka pin 4 diberikan logic
low (0), dan jika ingin memasukkan input data maka pin 4 diberikan logic high (1). Fungsi pin kelima untuk read atau write, jika diinginkan untuk membaca karakter data atau status informasi dari register (read) maka harus diberi masukan high (1), begitu
pula sebaliknya untuk menuliskan karakter data
(write) maka harus diberi masukan low (0). Pada pin ini dapat dihubungkan ke ground
bila tidak diinginkan pembacaan dari LCD dan hanya dapat digunakan untuk mentransfer data ke LCD. Pin keenam berfungsi sebagai enable, yaitu sebagai
pengatur transfer command atau karakter data ke dalam LCD. Untuk menulis ke dalam LCD data ditransfer waktu terjadi perubahan dari high ke low, untuk membaca dari LCD dapat dilakukan ketika terjadi transisi perubahan dari low ke high. Pin-pin dari nomor 7 sampai 14 merupakan data 8 bit yang dapat ditransfer dalam 2 bentuk yaitu 1 kali 8 bit atau 2 kali 4 bit, pin-pin ini aka langsung terhubung ke pin-pin
mikrokontroler sebagai input/output. Untuk pin nomor 15- 16 berfungsi sebagai
backlight (Petra, 2009).
2.5 Wireless Frequency Modulation
Jaringan Nirkabel atau dikenal dengan nama wireless, merupakan salah satu media transmisi yang menggunakan gelombang radio sebagai media transmisinya. Data-data digital yang dikirim melalui wireless akan dimodulasikan ke dalam gelombang elektromagnetik tersebut. Media transmisi wireless memiliki keunggulan dan
kelemahan, diantaranya sebagai berikut. Adapun keunggulan dari media transmisi
wireless :
1. Biaya pemeliharannya murah (hanya mencakup stasiun sel bukan seperti pada jaringan kabel yang mencakup keseluruhan kabel).
commit to user
3. Mudah & murah untuk direlokasi.
Sedangkan kelemahan yang terletak pada media transmisi wireless :
1. Biaya peralatan mahal (kelemahan ini dapat dihilangkan dengan mengembangkan dan memproduksi teknologi komponen elektronika sehingga dapat menekan biaya jaringan).
2. Delay yang besar, adanya masalah propagasi radio seperti terhalang, terpantul dan banyak sumber interferensi (kelemahan ini dapat diatasi dengan teknik modulasi, teknik antena diversity, teknik spread spectrum dan lain-lain ). (Wicahyo, 2010)
Modulasi adalah pengubahan parameter suatu isyarat (isyarat pembawa/ carrier
signal) oleh isyarat lain atau disebut juga penumpangan isyarat pemodulasi/ informasi
ke isyarat pembawa. (Warsun, 2009)
Perbedaan amplitudo modulasi dengan frekuensi modulasi sebagai berikut : a. Amplitudo Modulasi
Ampiltudo modulasi adalah salah satu bentuk modulasi dimana amplitudo sinyal pembawa di variasikan secara proposional berdasarkan sinyal pemodulasi (sinyal informasi). Frekuensi sinyal pembawa tetap konstan.
Kelemahannya:
1. Dapat terganggu olehgangguan atmosfir.
2. Bandwith yang sempit juga membatasi kualitas suara yang dapat dipancarkan. b. Frekuensi Modulasi
Frekuensi modulasi adalah suatu bentuk modulasi dimana frekuensi sinyal pembawa divariasikan secara proposional berdasarkan amplitudo sinyal input. Amplitudo sinyal pembawa tetap konstan. Adapun kelebihan frekuensi modulasi adalah sebagai berikut :
1. Modulasi frekuensi memerlukan bandwidth yang lebih lebar daripada modulasi amplitudo.
2. FM lebih tahan terhadap gangguan sehingga di pilih untuk sebagai modulasi standart untuk frekuensi tinggi.
commit to user 4. Daya yang dibutuhkan lebih kecil
(Nirwan, 2008)
2.6 Bahasa Assembly MCS51
Bahasa pemrograman generasi kedua adalah bahasa assembly. Bahasa rakitan (bahasa Inggris: assembly language) adalah bahasa pemrograman komputer tingkat
rendah. Bahasa assembly merupakan notasi untuk bahasa mesin yang dapat dibaca oleh manusia dan berbeda-beda tergantung dari arsitektur komputer yang digunakan. Berbeda dengan bahasa pemrograman tingkat tinggi, bahasa assembly atau rakitan biasanya memiliki hubungan 1-1 dengan instruksi bahasa mesin. Misalnya, tiap julukan (mnemonic) yang ditulis di program dengan bahasa rakitan akan
diterjemahkan menjadi tepat satu kode operasi yang dapat dimengerti langsung oleh komputer. Pada bahasa tingkat tinggi, satu perintah dapat diterjemahkan menjadi beberapa kode operasi dalam bahasa mesin. Proses pengubahan bahasa rakitan ke bahasa mesin dilakukan oleh assembler, dan proses balikannya dilakukan oleh disassembler. Setiap arsitektur komputer memiliki bahasa mesin yang berbeda-beda
sehingga bahasa rakitannya pun berbeda-beda.
Pemrograman AT89S51 bahasa Assembly. Bahasa Assembly adalah bahasa pemrograman tingkat rendah. Dalam pemrograman komputer dikenal dua jenis tingkatan bahasa, jenis yang pertama adalah bahasa pemrograman tingkat tinggi (high
level language) dan jenis yang kedua adalah bahasa pemrograman tingkat rendah (low
level language). Bahasa pemrograman tingkat tinggi lebih berorientasi kepada
manusia yaitu bagaimana agar pernyataan-pernyataan yang ada dalam program mudah ditulis dan dimengerti oleh manusia. Sedangkan bahasa tingkat rendah lebih
berorientasi ke mesin, yaitu bagaimana agar komputer dapat langsung mengintepretasikan pernyataan-pernyataan program.
Kelebihan Bahasa Assembly sebagai berikut : 1. Ketika di-compile lebih kecil ukuran
commit to user 3. Lebih cepat dieksekusi
Kesulitan Bahasa Assembly sebagai berikut :
1. Baris program relatif lebih panjang dibanding bahasa tingkat tinggi
2. Lebih sulit untuk dipahami terutama jika jumlah baris sudah terlalu banyak 3. Lebih sulit dalam melakukan pekerjaan rumit, misalnya operasi matematis
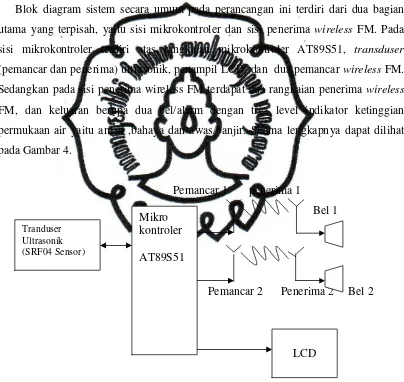
commit to user sisi mikrokontroler terdiri atas rangkaian mikrokontroler AT89S51, transduser
(pemancar dan penerima) ultrasonik, penampil LCD, dan dua pemancar wireless FM. Sedangkan pada sisi penerima wireless FM terdapat dua rangkaian penerima wireless
FM, dan keluaran berupa dua bel/alarm dengan tiga level indikator ketinggian
permukaan air yaitu aman ,bahaya dan awas/banjir. Skema lengkapnya dapat dilihat pada Gambar 4.
Pemancar 1 penerima 1
Bel 1
Pemancar 2 Penerima 2 Bel 2
Gambar 4. Diagram Blok Umum Sistem
commit to user
ping. Pemicuan oleh mikrokontroler ini, menyebabkan sensor ping akan memancarkan gelombang suara 40 KHz (ultrasonik), yang kemudian merambat melalui air.
Gelombang suara ini akan menghasilkan pantulan setelah mengenai permukaan air dan kembali ke sensor. Selama waktu pemancaran sinyal suara ini, kita lakukan penundaan pada mikrokontroler agar tidak langsung menerima interferensi sinyal yang dipancarkan, sekaligus menyiapkan mikrokontroler untuk menerima sinyal informasi
pantulan dari sensor.
Selanjutnya bila sensor menerima sinyal pantulan, maka ia akan mengirimkan pulsa rendah melalui kaki SIG (I/O pin) ke pin P1.1 mikrokontroler. Mikrokontroler akan menghitung, selang waktu antara pemancaran dan pantulan sinyal ini, kemudian dikalikan dengan nilai cepat rambat suara di air, guna memperoleh jarak dasar air dari
sensor tersebut (ketinggian air). Hasilnya ditampilkan pada penampil LCD di lapangan dan juga dikirimkan melalui pemancar wireless FM lalu diterima oleh penerima
wireless FM data diolah sehingga menjadi keluaran berupa bel/alarm 1, bel/alarm 2
dan 1-2 secara bersamaan.
Jika bel/alarm 1 berbunyi menandakan ketinggian permukaan air dalam keadaan
aman mengeluarkan suara level 1, Jika bel/alarm 2 berbunyi menandakan ketinggian air bahaya mengeluarkan suara level 2 dan jika bel/alarm 1-2 mengeluarkan suara level 3 yaitu berbunyi secara bersamaan dan ketinggian air sudah sudah melebihi batas normal sebagai peringatan dini akan terjadi banjir.
3.2 Komponen Perangkat Keras
Pada sub bab ini akan dijelaskan tentang komponen perangkat keras yang digunakan dalam perancangan sistem ini. Perangkat keras ini merupakan bagian dari
tiap-tiap blok diagram sistem yang saling mendukung satu dengan yang lainnya.
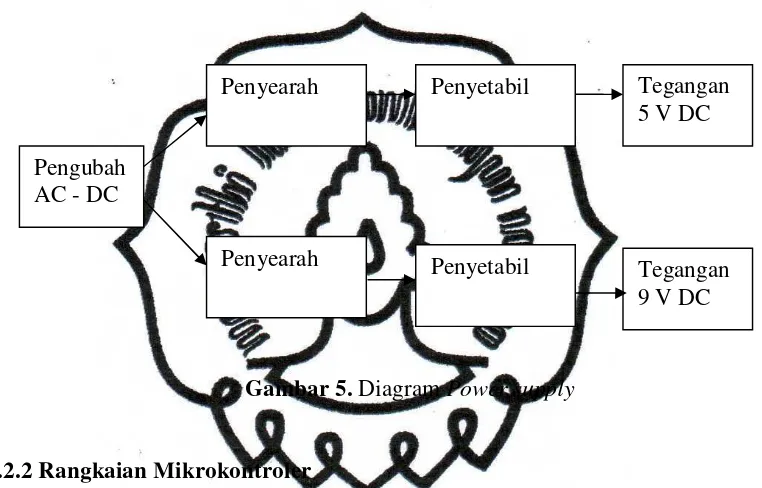
3.2.1 Rangkaian power supply
Rangkaian power supply digunakan untuk menurunkan tegangan yang masuk,
commit to user
menjadi tegangan yang dibutuhkan. Terdapat regulator yang berfungsi agar tegangan menjadi stabil dan transformator yang berfungsi sebagai pengubah tegangan dari AC
ke DC. Power supply ini mengubah tegangan dari 220 VAC ke 5 V DC dan 9 V DC serta menstabilkan tegangan yang ada. Diagram blok power supply ditunjukkan pada Gambar 5.
Gambar 5. Diagram Power supply
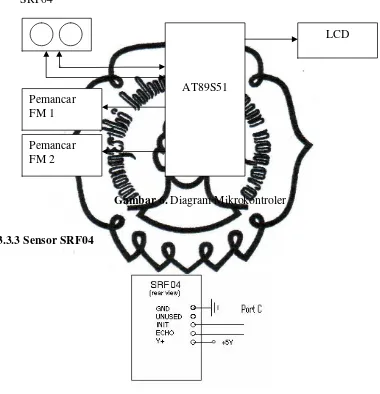
3.2.2 Rangkaian Mikrokontroler
AT89S51 merupakan komponen utama yang digunakan sebagai pemicu sensor ping untuk membangkitkan gelombang ultrasonik, pengolah data jarak yang diukur, mengontrol tampilan lcd dan pengiriman data oleh wireless FM. Pada rangkaian ini
terdapat sebuah osilator dan dua buah kapasitor yang berfungsi untuk menstabilkan frekuensi. Untuk mengaktifkan clock mikro ke CPU harus dipasang sebuah resonator
(kristal) diantara kaki-kaki X1 dan X2 pada mikrokontroler dan dua buah kapasitor yang dihubungkan ke ground Mikrokontroler AT89S51 memiliki 32 buah port I/O.
Dalam perancangan ini port-port yang digunakan adalah port P0.0 – P0.7 dan P2.5 – P2.7 yang dihubungkan ke rangkaian penampil lcd, port P2.0 – P2.2 terhubung ke rangkaian pembeda suara busser, kemudian port P1.0 mikrokontroler terhubung pada trigger sensor dan P1.1 mikrokontroler sebagai keluaran dari sensor SRF04 (pemancar
commit to user
Rangkaian ini menggunakan osilator kristal 12 MHz yang berfungsi membangkitkan sinyal clock internal. Jadi setiap satu instruksi MCS-51 akan dilaksanakan dalam
waktu 1 mikro detik. SRF04
Gambar 6. Diagram Mikrokontroler
3.3.3 Sensor SRF04
Gambar 7. Interface SRF04
Gambar 7 tidak dibahas secara detail, karena rangkaian tersebut sudah merupakan
suatu kesatuan dari hasil pabrikasi. Konfigurasi pin sensor SRF04 seperti terlihat pada gambar 7. Sensor ini memiliki 4 pin, yang masing-masingnya dihubungkan ke
AT89S51 Pemancar
FM 1
LCD
commit to user
Ground, Vcc (5V), trigger/ IN IT dihubungkan pin P1.0 dan echo dihubungkan ke P1.1 mikrokontroler.
3.3.4 Rangkaian Penampil LCD
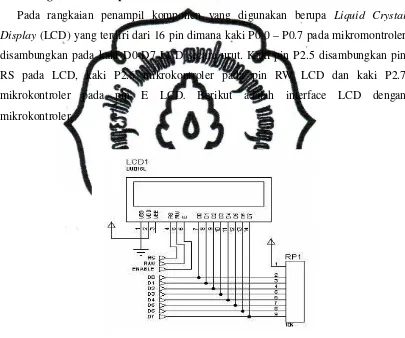
Pada rangkaian penampil komponen yang digunakan berupa Liquid Crystal
Display (LCD) yang terdiri dari 16 pin dimana kaki P0.0 – P0.7 pada mikromontroler
disambungkan pada kaki D0-D7 LCD secara urut. Kaki pin P2.5 disambungkan pin RS pada LCD, kaki P2.6 mikrokontroler pada pin RW LCD dan kaki P2.7 mikrokontroler pada pin E LCD. Berikut adalah interface LCD dengan mikrokontroler.
Gambar 8. Interface LCD
3.3.5 Rangkaian Pemancar Wireless FM
Pada rangkaian sistem umum terdapat 2 buah pemancar wireless FM, yaitu rangkaian pemancar 1 akan mengirimkan data jika lcd menyalakan angka 0,51m – 0,74m yang berarti ketinggian sungai dalam keadaan aman. Apabila lcd menyalakan
commit to user
mengirimkan sinyal ke penerima 2. Permukaan air sungai 0,03m-0,25m menandakan ketinggian sungai dalam keadaan awas/banjir yang berarti akan terjadi banjir dan
pemancar 1,2 akan mengirimkan data yang akan diterima oleh rangkaian penerima 1,2
wireless FM dan akan menghasilkan keluaran berupa bel/alarm dari kedua penerima
wireless FM. Gambar 9 merupakan gambar dari pemancar wireless FM.
antena
Pulsa/ Signal
Gambar 9. Diagram Blok Pemancar Wireless FM
Pada Gambar 9 sinyal/pulsa yang masuk ke Driver relay (yang berfungsi sebagai saklar otomatis) adalah pulsa yang dihasilkan pada mikrokontroler. Rangkaian pemancar wireless FM 1 dan 2 mendapat masukan dari kaki P2.0 – P2.2. Pada
perancangan ini, saya memanfaatkan rangkaian pada mic wireless yang dibongkar dan diambil blok exciter saja yang terdiri dari blok osilator dan blok penyangga (buffer) yang memiliki standar transmitter daya rendah. Sedangkan blok penguat daya
(booster) tidak dirakit dalam perancangan ini, hal ini dimaksudkan agar pemancar FM
yang digunakan nantinya tidak terlalu mempengaruhi gelombang FM dari stasiun pemancar lain. Frekuensi pada mic wireless berada padaa kisaran 88-108 MHz
3.3.6 Rangkaian Penerima Wireless FM
Untuk rangkaian penerima dalam perancangan ini digunakan receiver FM pada Driver
relay
transmitter osilator
commit to user
mic wireless yang banyak dijual di pasaran. Pemanfaatan rangkaian receiver yang
sudah jadi ini dilakukan untuk mendapatkan kemudahan dalam proses pembuatan
sistem perancangan keseluruhan, dikarenakan perancangan sistem yang akan dibuat ini menggunakan media transmisi gelombang radio pada jalur FM komersial (88-108MHz). Dalam hal ini penulis tidak membahas mengenai rangkaian dan jalur sistem penerimaan data secara keseluruhan, karena rangkaian yang digunakan adalah
rangkaian penerima wireless FM pada mic yang sudah memiliki jalur frekuensi yang sama dengan pemancar wireless FM. Gambar 10 adalah diagram blok dari rangkaian penerima wireless FM.
antenna (signal)
output Bel/alarm
Gambar 10. Diagram Blok Penerima Wireless FM
Dari diagram blok dapat dilihat gelombang radio ditangkap oleh antena. Kegunaan antena adalah sebagai bagian yang dapat menangkap radiasi gelombang penala.
Signal/pulsa yang diterima oleh antena diteruskan oleh receiver terdapat osilator yang berfungsi untuk penetap pada frekuensi dan penguat IF unuk menguatkan frekuensi. Diteruskan ke driver relay (saklar otomatis) untuk menyalakan output yang berupa bel/alarm. Pada rangkaian penerima wireless FM ini frejuensi sudah ditentukan oleh
pabri pembuat yaitu berkisar antara 88-108Mhz. osilator
Receiver Driver
Relay
commit to user 3.3 Perancangan Software
Perancangan perangkat lunak (software) dalam penelitian ini diperlukan agar sistem yang direncanakan dapat bekerja dengan baik. Dalam penelitian ini diperlukan program yang akan diinputkan pada mikrokontroler, guna mengontrol pemancaran dan penerimaan gelombang ultrasonic pada sensor SRF04, perhitungan ketinggian air
berdasarkan informasi dari sensor, menampilkan hasilnya pada lcd, dan mengirimkan informasinya dari pemancar wireless FM ke penerima wireless FM dengan output berupa bel/alarm. Program ini dibuat dengan bahasa assembly MCS-51 dan dimasukkan ke dalam mikrokontroler.
Diagram Alir Program MCS-51 yang diinputkan pada Mikrokontroler AT89S51
dapat dilihat pada gambar 11. Menggunakan software ASM51 yaitu program compiler
berbasis windows untuk mikrokontroler keluarga ATMEL.
3.3.1 Pemrograman Mikrokontroler AT89S51
Pemrograman dilakukan setelah semua komponen elektronika dan komponen
mikrokontroler terpasang dengan benar. Pemrograman dilakukan dengan menggunakan bahasa Assembler. Listing program ditulis dengan menggunakan program Notepad dan file disimpan dengan ekstensi “.asm”. Kemudian file “.asm” tersebut di- load dengan program compiler ASM51 untuk dirubah menjadi file “.hex”.
commit to user
commit to user BAB IV
IMPLEMENTASI DAN ANALISA
Bab ini berisi penjelasan tentang metode dan prosedur pengujian yang dilakukan serta hasil yang diperoleh dari masing-masing blok sistem tersebut. Pengujian dan
pembahasan dilakukan untuk mengetahui kesesuaian antara perancangan awal sistem terhadap alat yang akan dihasilkan, dapat bekerja dengan baik atau tidak. Pengujian yang dilakukan secara bertahap per blok-blok sistem dari keseluruhannya. Pengujian dimulai dengan memastikan setiap komponen yang digunakan dalam kondisi bagus (dapat bekerja dengan baik), kemudian mengecek setiap jalur yang terhubung dengan
komponen yang digunakan diatas papan PCB telah terkoneksi, dimana rangkaiannya disesuaikan dengan gambar skematiknya. Pengujian yang dilakukan meliputi pengujian catu daya, sistem minimum AT89S51, pengujian pemancar dan penerima
wireless FM dan pengujian sistem secara keseluruhan.
4.1 Pengujian Catu Daya
Pengujian rangkaian catu daya dilakukan dengan tahapan sebagai berikut : 1. Panel penunjuk multimeter diarahkan pada Volt DC.
2. Multimeter diatur nilainya sesuai dengan tegangan yang akan diukur.
3. Kabel merah pada multimeter dihubungkan dengan kutub positif trafo dan kabel hitam dihubungkan dengan kutub negatif trafo.
4. Jika jarum pada multimeter menunjukkan nilai yang tepat maka trafo dalam keadaan baik.
Pada rangkaian ini menggunakan trafo step down. Tegangan listrik rumah sebesar 220 Volt diubah menjadi 5 Volt dan 9 Volt. Tegangan 5 Volt untuk kebutuhan rangkaian mikrokontroler, lcd dan sensor, sedangkan 9 Volt tegangan yang dibutuhkan oleh rangkaian pemancar dan penerima wireless FM. Besaran tegangan yang
commit to user
menjadi tegangan DC menggunakan rangkaian penyearah. Rangkaian tersebut menggunakan empat buah dioda, digunakan dioda karena kemampuan dioda yang
hanya mengalirkan arus searah. Rangkaian catu daya ditunjukkan pada Gambar 12.
Gambar 12. Rangkaian Catu Daya 5V/1A dan 9V/1A DC
4.2 Pengujian IC AT89S51
Pengujian rangkaian mikrokontroler dilakukan dengan langkah sebagai berikut: 1. Dibuat rangkaian LED dengan anoda ke +5V dan ditambah dengan resistor 220Ω.
2. IC AT89S51 diberi tegangan +5V 3. LED dihubungkan dengan P1.0
4. Dibuat program dengan bahasa assembler. Pada port P1.0 diberikan nilai low. Listing programnya sebagai berikut :
Start : Clr P1.0
Jmp Start
End
commit to user Berikut gambar pengujian rangkaiannya :
Gambar 13. Pengujian IC AT89S51
Sistem kerja dari mikrokontroler AT89S51 antara lain :
1. Melakukan proses rutin inisialisasi, yakni proses untuk mengkondisikan informasi yang dibutuhkan sebelum proses pengambilan data jarak dilakukan sensor ultrasonik.
Adapun inisialisasi ini dilakukan terhadap display LCD.
2. Melakukan proses rutin interupsi, yakni proses pengambilan data jarak dilakukan. Urutan proses kerjanya adalah :
a. Memerintahkan sensor ultrasonik untuk melakukan pengukuran jarak. b. Mengambil data jarak dari sensor ultrasonik.
3. Melakukan proses pengolahan data yakni dengan cara : a. Menyimpan data dan mengolah data jarak.
b. Konversi data HEX ke ASCII (LCD)
commit to user
Tujuan pengujian rangkaian LCD adalah untuk mengecek apakah LCD bekerja dengan baik. Untuk mengetahui apakah LCD berfungsi dengan baik atau tidak, bisa
dilakukan dengan menghubungkannya dengan catu daya yang diberi tegangan 5 Volt. Rangkaian yang digunakan adalah sebagai berikut :
Gambar 15. Pengujian Rangkaian LCD
Pin – pin pada LCD yang dihubungkan antara lain pin VSS dihubungkan dengan
ground pada catu daya dan VDD dihubungkan dengan kutub positif +5v pada catu
daya. Untuk mengatur tingkat kecerahan atau kontras dari LCD dilakukan dengan cara
commit to user 4.4 Pengujian Rangkaian Sensor Ultrasonik SRF04
Pengujian sensor ultrasonik bertujuan untuk mengetahui jarak minimum dan
maksimum yang dapat diukur oleh sensor ultrasonik SRF04 serta membandingkan jarak sebenarnya dengan jarak hasil pengukuran menggunakan sensor ultrasonik SRF04. Untuk menguji sensor ultrasonik SRF04 dapat menggunakan rangkaian seperti pada Gambar 14.
Gambar 14. Rangkaian Modul Sensor Ultrasonik SRF04
Pengujian rangkaian sensor ultrasonik SRF04 dilakukan dengan menghubungkan antara modul sensor ultraonik SRF04 dengan rangkaian mikrokontroler AT89S51. Pin
– pin pada SRF04 yang dihubungkan antara lain pin sumber tegangan +5v dihubungkan dengan kutub positif trafo regulator +5v, Pin Trigger dihubungkan dengan P1.0, Pin Echo dihubugkan dengan P1.1 dan pin Ground dihubungkan dengan kutub negatif trafo regulator. Cara kerja dari sensor ultrasonik SRF04 adalah mula –
mula SRF04 diaktifkan melalui pin Trigger minimal 10 µs dengan mengirimkan pulsa positif dari IC mikrokontroler. Selanjutnya pin TX akan mengirim sinyal pada saat logika 1 atau high yang mengenai penghalang dan sinyal pantulan dari penghalang akan diterima oleh RX. Pada saat menerima sinyal pantulan, RX berlogika 0 atau low,
commit to user
inilah yang akan digunakan untuk pengukuran jarak. Selanjutnya adalah melakukan ujicoba pegukuran jarak sensor ultrasonik SRF04 dengan cara menempatkan sensor
ultrasonik di depan penghalang dan memvariasi jarak pengukuran. Hasil yang didapat dari pengukuran jarak dapat dilihat pada Tabel 3.
Jarak penghalang (cm) Jarak Pada LCD (m)
1 0,03 = 3 cm
Tabel 3. Hasil pengukuran jarak dengan sensor ultrasonik SRF04
commit to user
Tabel 4. Perbandingan Pengukuran Jarak
Dari pengujian yang dilakukan didapatkan hasil bahwa sensor ultrasonic SRF04 mampu mengukur jarak mulai dari 0 cm sampai dengan 66 cm. Pada pengukuran jarak
yang semakin jauh didapatkan hasil yang tidak sesuai atau menyimpang dengan jarak sebenarnya, hal ini disebabkan media yang menjadi penghalang. Angka yang ditampilkan pada LCD terdapat selisih dengan jarak sebenarnya, hal ini dipengaruhi oleh beberapa factor diantaranya adalah karakteristik penghalang atau objek yang dapat memantulkan sinyal kembali ke sensor ultrasonik dan adanya sinar matahari
yang dapat mengganggu jalannya sinyal dari sensor ultrasonik. Secara teori, sensor ultrasonic SRF04 ini dapat bekerja dengan baik sesuai dengan spesifikasi dari sensor ultrasonik SRF04 yaitu dapat mengukur jarak mulai dari jarak minimum 3cm sampai dengan jarak maksimum 3 m.
4.5 Pengujian Rangkaian Pemancar Dan Penerima FM
Pada pengujian rangkaian ini, memanfaatkan rangkaian mic wireless yang sudah terkonfigurasi(frekuensinya) antara channel 1 dan channel 2 yang bisa mencapai jarak 15 meter. Pada sistem ini menggunakan dua rangkaian pemancar wireless FM yang digunakan pada kemungkinan bunyinya bel/alarm dalam tiga keadaan ketinggian
permukaaan air aman,bahaya dan awas/banjir.
commit to user
terdiri dari dua penerima dengan frekuensi yang sudah ditentukan pabrik. Bel/alarm dipasang pada penerima wireless FM dengan bantuan relay yaitu sebagai saklar
otomatis ketika menerima frekuensi yang sama oleh pemancar. Busser digunakan untuk sumber suara yang menjadi tanda ketinggian air.
Untuk menguji rangkaian wireless FM ini sama dengan membunyikan mic dengan suara kita jika suara dari mic sudah dapat di dengar pada speaker berarti penerima
wireless FM sudah dapat bekerja. Mic(transmitter) dan penerima wireless FM
(receiver) kita bongkar dan diambil rangkaian nya saja. Rangkaian pemancar dan
penerima wireless FM dapat dilihat pada Gambar 16 dan Gambar 17.
commit to user
Gambar 17. Rangkaian Penerima FM
commit to user
commit to user Penerima 1
commit to user
Gambar 19. Keseluruhan Penerima Wireless FM
Pada rangkaian keseluruhan sistem, setelah menyambungkan semua rangkaian dilanjutkan dengan menyambungkan kaki P2.2 pada mikrokontroler disambungkan pada indikator aman rangkaian pembeda suara busser (pada Lampiran) kemudian menyalakan relay yang akan mengirimkan sinyal melalui antena. Terdapat indikator
berupa LED berwarna hijau agar dapat mengetahui bahwa rangkaian sudah menyala atau belum. Begitupun pada kaki P2.1 mikrokontroler disambungkan pada indikator bahaya rangkaian pembeda suara busser (pada Lampiran). Kaki mikrokontroler P2.0 disambungkan pada indikator awas rangkaian pembeda suara busser(gambar rangkaian pada Lampiran) masing-masing kaki guna untuk menyalakan pemancar 1
dan pemancar 2 agar bel/alarm berbunyi secara bersamaan sebagai indikator ketinggian permukaan air dalam keadaan awas/banjir .
Indikator A dan B pada rangkaian pembeda suara busser (pada Lampiran) disambungkan pada rangkaian pemancar 1 dan 2. Rangkaian pemancar 1 dan 2 sudah diatur frekuensinya oleh pabrik sehingga frekuensi yang dihasilkan berbeda.
Jika angka pada LCD menunjukkan angka 0,51m – 0,74 m pemancar 1 akan 0,03m-0,25m ketinggian permukaan air dalam keadaan awas/banjir dengan indikator bel 1 dan bel 2 menyala (level 3), led nyala merah. Karena ini merupakan prototype
dari alat yang sebenarnya, maka diambil tiga kemungkinan dari keadaan aman,bahaya dan keadaan awas/banjir.
Level 1 ditandai dengan bunyi putus-putus jarang pada busser, level 2 ditandai bunyi putus-putus cepat pada busser dan level 3 ditandai dengan bunyi secara terus
commit to user BAB V
PENUTUP
5.1 Kesimpulan
Kesimpulan yang dapat diperoleh setelah megerjakan Tugas Akhir dengan judul Sistem Pemantauan Ketinggian Air Berbasis Mikrokontroler AT89S51 yaitu :
1. Telah dibuat alat elektrik yang dapat mengukur ketinggian permukaan air dengan mikrokontroler AT89S51 yang berfungsi sebagai pengendali utama pada pemrosesan data jarak permukaan air yang dihasilkan dari sensor ultrasonik. 2. Didapatkan hasil pengolahan data dari sensor ultrasonik menggunakan bahasa
assembly sehingga keluaran berupa LCD dan bel (Alarm).
5.2 Saran
Adapun saran-saran yang dianggap perlu untuk disampaikan adalah:
1. Pengembangan model Prototipe Sensor Ketinggian Air Berbasis Mikrokontroler AT89S51. Dimana alat yang dibuat tidak hanya dalam bentuk prototipe, tetapi
langsung diterapkan pada jembatan.
commit to user DAFTAR PUSTAKA
Adit, 2011, Pengertian Bahasa Assembly,
http://adt90s.blogspot.com/2011/04/pengertian-bahasa-assembly.html, diakses 12
Mei 2011 pukul 16.14 WIB.
Afdhal, Nurul, 2009, Level Water Monitoring System, Banda Aceh.
Nirwan, 2008, Perbedaan Sinyal FM-AM,
http://nirwan.blogdetik.com/index.php/2008/05/beda-sinyal-fm-am, diakses 12
Mei 2011 pukul 16.14 WIB.
Petra, 2009, Prototype Chapter3, http://digilib.petra.ac.id/prototype-capter3.pdf/2009, diakses 12 Mei 2011 pukul 16.16 WIB
Warsun, 2008, Komunikasi radio Digital dan Analog, http://www.te.ugm.ac.id/~warsun/telkom/presentasi/kom_radio/kel%202/Modulasi
%20Analog.ppt, diakses 12 Mei 2011 pukul 16.14 WIB.
Wicahyo, Deny Eka, 2010, Pengertian jaringan Wireless,
http://denyekawicahyo.cz.cc/pengertian-jaringan-wireless.html, diakses 12 Mei