RANCANGAN ALAT PENGUKUR KECEPATAN KENDERAAN DI
JALAN TOL BERBASIS MIKROKONTROLER AT89S51
Oleh :
Drs. Bisman Perangin-angin, M. Eng.Sc NIP : 19560918 198503 1 002
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
HALAMAN PENGESAHAN
Judul Penelitian :
RANCANGAN ALAT PENGUKUR KECEPATAN KENDERAAN DI
JALAN TOL BERBASIS MIKROKONTROLER AT89S51
Medan, September 2008
Dikatahui Oleh :
Dekan FMIPA- USU
KATA PENGANTAR
Dengan mengucapkan puji dan syukur kehadirat Tuhan Yang Maha Esa, kegiatan penulisan makalah ilmiah ini dapat diselesaikan dengan baik. Untuk itu saya juga mengucapkan banyak terimakasih kepada seluruh pendukung serta fasilitas yang diberikan baik laboratorium maupun referensi yang banyak mendukung dalam
penulisan makalah ilmiah ini.
Ucapan terima kasih juga saya ucapkan kepada seluruh staf pengajar FMIPA-USU yang telah berkenan memberikan informasi pengetahuan untuk mendukung penulisan makalah ini.
Kami menyadari masih banyak kelemahan dan kekurangan dalam makalah ilmiah ini, untuk itu kami mengharapkan saran dari pembaca agar penulisan makalah ini dapat ditingkatkan pada hari yang akan dating.
Akhir kata dengan penulisan makalah ini diharapkan dapat menghasilkan suatu manfaat untuk meningkatkan ilmu pengetahuan dan teknologi di USU khususnya dan di Indonesia pada umumnya.
Medan, September 2008 Penulis
DAFTAR ISI
II.1. Arsitektur Mikrokontroler AT89S51 ... 2
II.2. Memori Program dan Memori Data ... 3
II.3. Mikrokontroler AT89C2051 ... 6
III. METODE PENELITIAN ... 8
III.1. Diagram Blok Peralatan ... 8
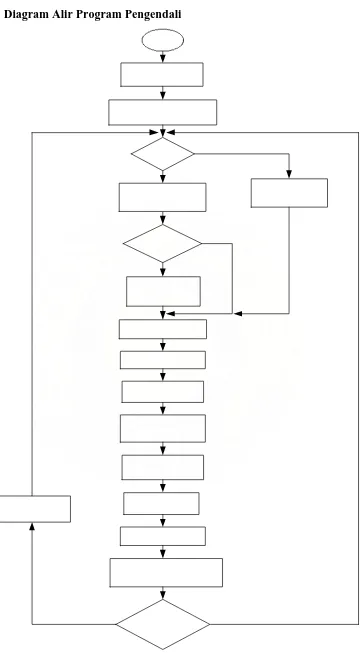
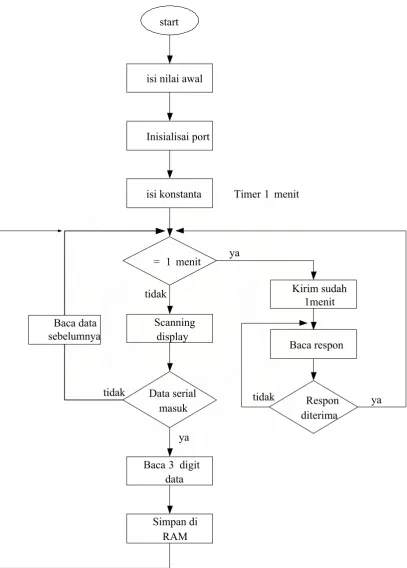
III.1.1 Diagram Alir Program Pengendali ... 9
III.1.2 Rangkaian Catu Daya (PSA) ... 12
III.1.3 Rangkaian Minimum AT89S51 ... 13
III.1.4 Sistem Sensor ... 14
III.1.5 Rangkaian Buzzer ... 15
III.1.6 Rangkaian Display Seven Segmen ... 15
III.1.7 Rangkaian Keypad ... 17
III.2. Metode Pengambilan Data ... 19
IV. HASIL DAN PEMBAHASAN ... 23
IV.1. HASIL ... 23
IV.2. PEMBAHASAN ... 24
V. KESIMPULAN DAN SARAN ... 26
Intisari
Telah dirancang dan direalisasikan sebuah sistem pengukur kecepatan kenderaan berbasis Mikrokontroler AT89S51 yang dilengkapi dengan 2 sensor inframerah sebagai pendeteksi kecepatan kenderaan. Sensor_1 berfungsi untuk start menghitung waktu. Sementara sensor_2 untuk menghentikan penghitungan waktu pada sensor_1. Jarak antara sesor_1 dan sensor_2 dibuat konstan yaitu 50 cm. Kemudian rangkaian ini dihubungkan dengan mikrokontroler AT89S51 dan data yang masuk akan diolah dan ditampilkan pada tujuh segmen. Mikrokontroler sebagai pengendali utama dirancang untuk membaca kecepatan kenderaan setiap 1 ms. Selain untuk mengukur kecepatan kenderaan alat ini juga diprogram untuk mendeteksi kenderaan yang melebihi batas kecepatan serta menghitung jumlah kenderaan.
I. PENDAHULUAN
Kemampuan dalam hal kecepatan bagi produk otomotif sekarang (roda empat)
menjadi salah satu andalan dalam meraih pasar. Hampir semua produk terbaru
kenderaan bermotor, kecepatan maksimalnya mengalami peningkatan. Terlebih lagi
dengan adanya jalan tol, ajang mencoba kemampuan kenderaan pun makin terbuka.
Karenanya tidaklah heran jika banyak pengemudi yang menancap pedal gas kenderaan
bermotornya hingga maksimal. Perilaku pengemudi kenderaan bermotor seperti itu
tidak dibenarkan karena jelas membahayakan keselamatan perjalanannya. Sebab
bagaimanapun sigapnya pengemudi ancaman kecelakaan tetaplah sangat besar.
Perlu diketahui, mengendarai kenderaan bermotor meskipun di jalan tol tidak
berarti kecepatannya boleh seenaknya. Jalan tol memang bebas hambatan, tetapi
terdapat juga aturan-aturan mengenai batas kecepatan di jalan tol. Misalnya untuk
kecepatan kenderaan untuk jalan tol dalam perkotaan maksimalnya adalah 80 km/jam.
Sementara kecepatan untuk kenderaan bermotor di jalan tol luar kota maksimalnya
adalah 100 km/jam.
Dalam kesempatan kali ini, penulis memanfaatkan mikrokontroler AT89S51
untuk merancang suatu alat ukur kecepatan kendaraan di jalan tol yang dilengkapi
dengan alarm. Alat ini terdiri dari dua laser pointer dan dua rangkaian penerima.
Kedua sensor ini dipasang dengan jarak 50cm dan jarak antara pemancar dengan
penerimanya adalah sesuai dengan lebar jalan tol tersebut. Rangkaian I berfungsi
untuk menentukan waktu kejadian dan untuk start menghitung waktu. Rangkaian II
untuk menghentikan penghitungan waktu pada rangkaian I. Kemudian rangkaian ini
dihubungkan dengan mikrokontroler AT89S51 dan data yang masuk akan diolah dan
ditampilkan pada tujuh segmen. Alat ini dapat diset sesuai dengan kecepatan yang
dibutuhkan. Pada kecepatan di atas kecepatan yang diset maka alarm akan berbunyi
sebagai pemberi isyarat bahwa kendaraan tersebut telah melebihi kecepatan yang
ditentukan. Rancangan ini juga dilengkapi dengan sebuah counter yang berfungsi
II. Dasar Tiori
II.1.. Arsitektur Mikrokontroler AT89S51
Mikrokontroller AT89S51 termasuk dalam keluarga mikrokontroler MCS-51 yang
merupakan versi yang dilengkapi dengan ROM (internal) yaitu berupa EPROM
(Electrical Erasable Programmabel Read Only Memory). Mikrokontroler ini adalah
low- power high perfomance CMOS 8-BIT, 4 Kbyte Flash Programmbel and
Erasabel Read Only Memory (PEROM). Mikrokontroler ini compatibel dengan
standar MCS-51 baik dari instruksi maupun dari pin-pin yang dapat diaplikasikan
sebagai embedded controller.
Mikrokontroler sebagai suatu terobosan teknologi mikrokontoler dan
mikrokomputer, hadir memenuhi kebutuhan pasar (market need) dan teknologi baru.
Sebagai teknologi baru, yaitu teknologi semikonduktor dengan kandungan transistor
yang lebih banyak namun hanya membutuhkan ruang kecil serta dapat diproduksi
secara massal (dalam jumlah banyak) sehingga harga menjadi lebih murah
(dibandingkan mikroprosesor). Sebagai kebetuhan pasar, mikrokontroler hadir untuk
memenuhi selera industri dan para konsumen akan kebutuhan dan keinginan alat-alat
bantu dan mainan yang lebih canggih.
Tidak seperti sistem komputer, yang mampu menangani berbagai macam
program aplikasi (misalnya pengolah kata, pengolah angka dan lain sebagainya),
mikrokontroler hanya bisa digunakan untuk satu aplikasi tertentu saja. Perbedaan
lainnya terletak pada perbandingan RAM-nya dan ROM. Pada system komputer
perbandingan RAM dan ROM-nya besar, artinya program-program pengguna
disimpan dalam ruang RAM yang relative besar, sedangkan rutin-rutin antarmuka
perangkat keras disimpan dalam ruang ROM yang kecil. Sedangkan pada
mikrokontroler, perbandingan ROM dan RAM-nya yang besar artinya program
control disimpan dalam ROM (bisa Masked ROM atau Flash PEROM) yang
ukurannya relatif lebih besar, sedangkan RAM digunakan sebagai tempat
II.2. Memori Program dan Memori Data
Memori program atau ROM (Read Only Memory) adalah tempat menyimpan data
yang permanen. Memori program bersifat non volatile artinya tanpa di catu, data-data
tidak akan hilang. Memori program hanya dapat dibaca saja. Setelah di reset maka
eksekusi dimulai dari alamat 000H. Setiap instruksi memiliki lokasi tetap dalam
program. Instruksi menyebabkan CPU melompat ke lokasi tersebut dimana pada
lokasi tersebut terdapat subrutin yang harus dikerjakan. Port 0 dan Port 2 digunakan
untuk menghubungi EEPROM, digunakan untuk Bus Data dan Bus Alamat. Port 0
memultipleks alamat data.
Port ini mengirimkan byte dari Program Counter (PC). Sebagai suatu alamat
dan kemudian port ini akan berada pada keadaanmengambang menunggu datangnya
kode byte dari memori program. Selama waktu rendah dari PC valid pada Port 0,
sinyal ALE dikirimkan sehingga byte rendah PC akan ditahan.
Memori data atau RAM (Random Acces Memori) adalah suatu komponen memori
yang dapat ditulis maupun dibaca dengan mudah, namun komponen ini mempunyai
keterbatasan dalam kemampuan penyimpanan data maupun program secara permanen.
Memori yang dimiliki adalah bersifat volatile yaitu data yang akan hilang bila catu
daya ditiadakan. Gambar 2.3. menunjukan konfigurasi hardware untuk mengakses
Gambar 2.3 Pengaksesan AT89S51 Terhadap RAM Eksternal.
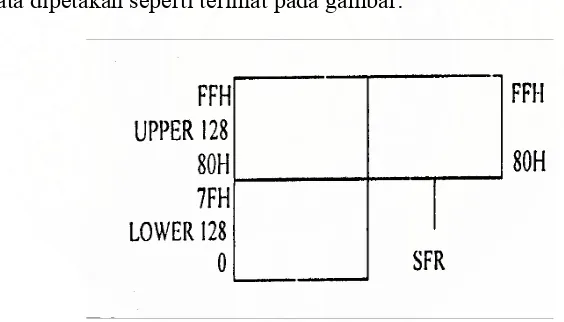
Sedangkan gambar 2.4. merupakan pemetaan data memori internal. Dalam
keadaan ini CPU mengakses program dari internal ROM. Port 0 sebagai multipleks
bus alamat / data RAM, dan 3 jalur data digunakan untuk memberi halaman pada
RAM. Memori eksternal dialamati dengan lebar 1 atau 2 byte. Bagian bawah internal
memori data dipetakan seperti terlihat pada gambar:
Gambar 2.4 Memori Data Internal
Ruang memori pada 3 blok, yang disebut sebagai lower 128, upper 128 dan
ruang SFR. Internal memori data dialamati dengan lebar 1. lower 128 (alamat
FFH
80 FH
(b) 0 FH
2 FH
1 FH
17H
07H
(a)
7 FH
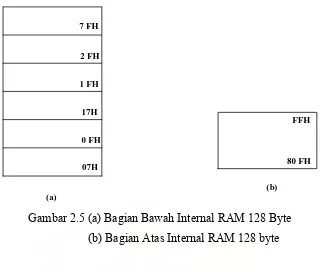
Gambar 2.5 (a) Bagian Bawah Internal RAM 128 Byte
(b) Bagian Atas Internal RAM 128 byte
Gambar 2.6. merupakan bagian atas dari internal RAM. Sebanyak 32 byte
terendah terbagi atas 4 bank dari 8 register disebut sebagai R0-R7. dua bit dari register
PSW memilih bank mana yang digunakan. Kemudian 16 byte diatas bank register
membentuk blok memori yang dapat dialamati per-bit. Special Function Register atau
SFR adalah register yang berfungsi khusus misalnya latch port, timer, control,
pheipheral dan sebagainya.
II.3 Mikrokontroler AT89C2051
Mikrokontroler AT89S51 merupakan salah satu keluarga dari MCS-51 keluaran
Atmel. Jenis mikrokontroler ini pada prinsipnya dapat digunakan untuk mengolah data
per bit ataupun data 8 bit secara bersamaan.Mikrokontroler dapat beroperasi dalam
tegangan antara 4,0 V sampai 5,0 V. Beberapa fasilitas yang dimiliki mikrokontroler
AT89C2051 adalah sebagai berikut:
1. Kompatibel dengan produk MCS-51
2. Flash memori 2 Kbyte dengan ketahanan1000 kali ditulis ulang atau dihapus
3. Batas operasi antara 2,7V-6V
4. Fully Static Operation : 0 Hz sampai 24 MHz
5. Dua (2) level kunci memori progam
6. 128 x 8 bit RAM internal
7. 16 jalur I/O
8. Dua 16 bit Timer/Counter
9. Enam (6) sumber interrupt
10. Jalur serial dengan UART
Deskripsi pin pada mikrokontroler AT89C2051:
Port 1 merupakan port parallel 2 arah. P 1.2 – P1.7 sebagai internal pull-ups. P1.0 dan
P1.1 sebagai eksternal pull-ups. Port 1 juga menerima kode data melalui flash
programming.
Port 3
Port (Pin) Fungsi
P3.0 (Pin 2) RXD (port input serial)
P3.1 (Pin 3) TXD (port output serial)
P3.2 (Pin 6) INT0 (interup eksternal 0)
P3.3 (Pin 7) INT1 (interup internal 1)
P3.4 (Pin 8) T0 (input eksternal timer 0)
P3.5 (Pin 9) T1 (input eksternal timer
Tabel 2.3 Fungsi pin pada port 3 Mikrokontroler AT89S51
RST
Untuk mereset isi register dan memori pada saat sistem dihidupkan. Reset akan aktif
dengan memberikan input high selama 2 cycle.
XTAL1
Masukan inverting penguat osilator
XTAL2
III. METODE PENELITIAN
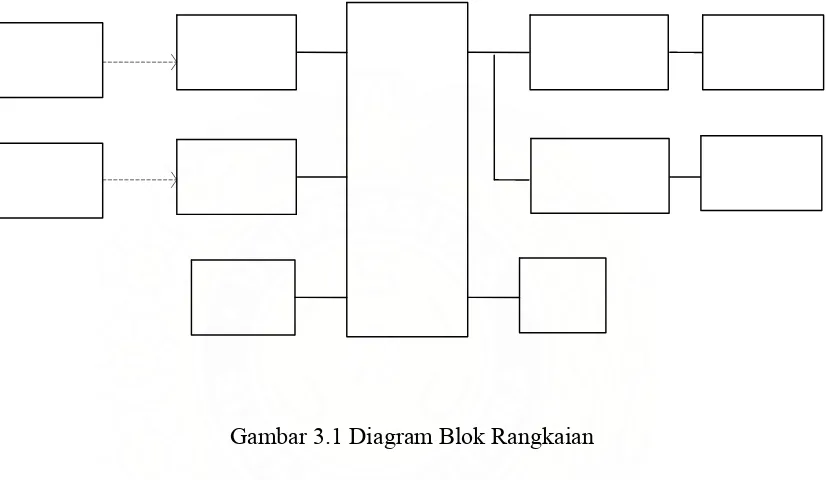
III.1 Diagram Blok Peralatan
Adapun diagram blok dari sistem yang dirancang adalah seperti yang diperlihatkan
pada gambar di bawah ini:
Gambar 3.1 Diagram Blok Rangkaian
Fungsi dan kegunaan masing-masing blok adalah seperti dijelaskan berikut ini
1. Display berfungsi untuk menampilkan kecepatan kendaraan dan jumlah kendaraan
yang melalui jalan tol tersebut.
2. Sensor mengirimkan sinyal ke mikrokontroler AT89S51 pada saat kendaraan
melewati sensor.
3. Mikrokontroler AT89S51 berfungsi menerima sinyal dari sensor sekaligus
pengendali utama rangkaian.
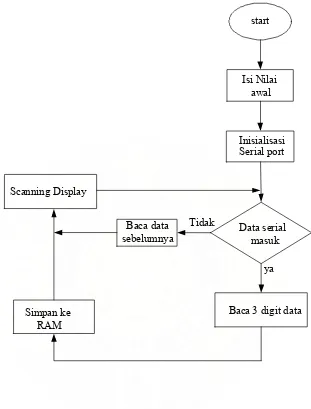
start
Isi Nilai awal
Inisialisasi Serial port
Baca 3 digit data ya
Tidak Data serial
masuk Scanning Display
Simpan ke RAM
Baca data sebelumnya
start
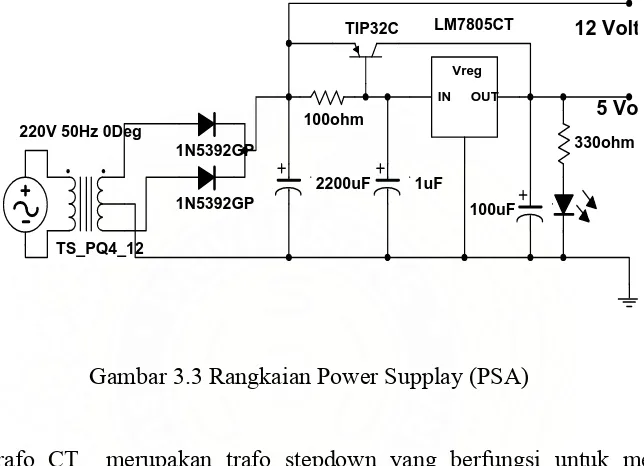
III.1.2 Rangkaian Catu Daya (PSA)
Rangkaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan 12 volt,
keluaran 5 volt digunakan untuk menghidupkan seluruh rangkaian, sedangkan
keluaran 12 volt digunakan untuk menghidupkan buzzer. Rangkaian tampak seperti
gambar 3.3 di bawah ini.
Vreg
Gambar 3.3 Rangkaian Power Supplay (PSA)
Trafo CT merupakan trafo stepdown yang berfungsi untuk menurunkan
tegangan dari 220 volt AC menjadi 12 volt AC. Kemudian 12 volt AC akan
disearahkan dengan menggunakan dua buah dioda, selanjutnya 12 volt DC akan
diratakan oleh kapasitor 2200 μF. Regulator tegangan 5 volt (LM7805CT) digunakan
agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan
masukannya. LED hanya sebagai indikator apabila PSA dinyalakan. Transistor PNP
TIP 32 disini berfungsi untuk mensupplay arus apabila terjadi kekurangan arus pada
rangkaian, sehingga regulator tegangan (LM7805CT) tidak akan panas ketika
rangkaian butuh arus yang cukup besar. Tegangan 12 volt DC langsung diambil dari
keluaran 2 buah dioda. Tegangan ini digunakan untuk mensupplay tegangan ke
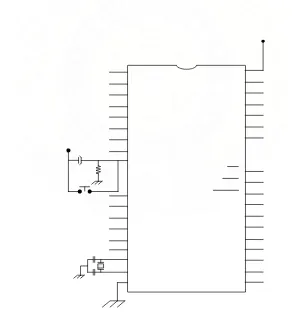
III.1.3 Rangkaian Minimum AT89S51
Rangkaian mikrokontroler ini merupakan pusat pengolahan data dan pusat
penegendali alat. Di dalam rangkaian mikrokontroler ini terdapat emat buah port yang
digunakan untuk menampung input atau output data yang terhubung langsung oleh
rangkaian-rangkaian dari alat penegendali.
Rangkaian ini tersusun atas asilator kristal 11,059 MHz yang berfungsi untuk
membangkitkan pulsa internal dan dua buah kapasitor sebesar 10pF yang berfungsi
untuk menstabilkan frekuensi. Kapasitor 4,7 F dan resistor 8K2 berfungsi untuk reset
sebelum program yang terdapat pada mikrokontroler dijalankan. Pin 20 merupakan
ground yang dihubungkan dengan ground pada power supply. Pin 40 merupakan
sumber tegangan positif yang dihubungkan dengan +5V dari power supply.
III.1.4 Sistem Sensor
Gambar 3.5 Sistem sensor
Cara kerja rangkaian sensor yaitu pada saat tidak adanya penghalang antara
laser pointer infra merah dengan photodioda (cahaya langsung mengenai photodioda),
maka photodioda akan terhubung. Hal ini mengakibatkan TR1 mendapat bias mundur
dimana arus dari V1 dan TR1 mengalir menuju ground melalui photodioda. Sementara
TR2 akan mendapat bias maju dari V2 sehingga led akan menyala dan P1.0
berlogika 1 (high).
Sebaliknya apabila photodioda terhalang, maka photodioda akan terputus
sehingga TR1 mendapat bias maju dari V1. Sedangkan arus dari TR2 mengalir
melalui TR1 menuju ground. Pada keadaan ini TR2 mendapat bias mundur sehingga
III.1.5 Rangkaian Buzzer
Rangkaian buzzer adalah rangkain yang berfungsi untuk mengaktifkan buzzer
sehingga menghasilkan bunyi. Rangkaian buzzer ini dikendalikan oleh P2.7. Pada
saat rangkaian mendapatkan logika 1 (high) maka buzzer akan aktif. Keadaan ini
didapat ketika kecepatan kendaraan melebihi batas kecepatan kendaraan yang telah
diset melalui keypad.
Gambar 3.6 Rangkaian Buzzer
III.1.6 Rangkaian Display Seven Segmen
Hasil pengukuran kecepatan kendaraan dan jumlah kendaraan yang terdeteksi oleh
sensor akan ditampilkan pada seven segmen. Rangkaian seven segmen tampak seperti
1 RST VCC 20
Gambar 3.7 Rangkaian Display Seven Segmen
Display terdiri terdiri dari dua bagian yaitu bagian pertama untuk
menampilkan kecepatan kendaraan dan bagian yang kedua untuk menampilkan
jumlah kendaraan. Setiap bagian rangkaian display dikendalikan oleh sebuah
mikrokontroler AT89C2051 yang berfungsi sebagai driver display seven segmen.
Rangkaian ini dihubungkan secara parallel dengan mikrokontroler AT89S51 melalui
P2.3 dan P2.4 serta sebuah masukan enable pada P3.1
Seven segmen yang digunakan adalah aktip low, ini berarti segmen akan hidup
jika diberi data low (0) dan segmen akan mati jika diberi data high (1). Untuk
menampilkan angka pada seven segmen, maka data yang harus diberikan adalah
sebagai berikut:
a. Untuk menampilkan angka nol, data yang harus dikirim adalah 011h.
b. Untuk menampilkan angka satu, data yang harus dikirim adalah 0dbh
c. Untuk menampilkan angka dua, data yang harus dikirim adalah 038h
d. Untuk menampilkan angka tiga, data yang harus dikirim adalah 098h
e. Untuk menampilkan angka empat, data yang harus dikirim adalah 0d2h
f. Untuk menampilkan angka lima, data yang harus dikirim adalah 094h
i. Untuk menampilkan angka delapan, data yang harus dikirim adalah 010h
j. Untuk menampilkan angka sembilan, data yang harus dikirim adalah 0d0h
k. Untuk tampilan kosong (tidak ada nilai yang tampil), data yang harus dikirim
adalah 0ffh
Program untuk menampilkan angka pada display seven segmen adalah sebagai
berikut:
bilkosong equ 0ffh ; untuk tampilan kosong
III.1.7 Rangkaian Keypad
Rangkaian keypad terdiri dari 3 tombol masukan (berupa tombol push on) dengan
masing-masing tombol memiliki fungsi yang berbeda, yaitu:
a. Tombol 1 berfungsi sebagai reset.
Jika saklar sw1 ditekan, reset bekerja secara manual, aliran arus akan
mengalir dari VCC menuju RST, tegangan ini mengakibatkan RST
berlogika 1. Jika saklar dilepas aliran arus dari VCC akan terhenti dan
tegangan pada RST akan turun menuju ke nol sehingga logika pada kaki
Gambar 3.8 Skema rangkaian reset
b. Tombol 2 berfungsi sebagai masukan untuk mengeset batas kecepatan
maksimum kendaraan (skala 10 km/jam)
c. Tombol 3 berfungsi untuk start pengukuran kecepatan.
Alat pengukur kecepatan kendaraan ini akan aktif bila diberi masukan melalui
III.2. Metode Pengambilan Data
Setelah perancangan alat dan rangkaian selesai dirakit maka alat akan diuji baik
program maupun rangkaian secara keseluruhan. Untuk mengendalikan rangkaian
maka dibuatlah program sebagai berikut:
a. Program untuk subrutin delay 1 ms
Lamanya waktu tunda dapat dihitung dengan perhitungan sebagai berikut :
Kristal yang diginakan adalah 11,0592 MHz, sehingga 1 siklus mensin membutuhkan
waktu : S
= , sehingga waktu tunda untuk delay 1_mS adalah:
Delay_1mS:
Jadi waktu untuk mengeksekusi program delay 1mS adalah 1,038mS.
b. Program untuk subrutin penghitungan jumlah tundaan waktu
Sense1a:
Cjne R0,#250,Sense3 ;maximum tundaan waktu = 250 ms
Ajmp Step1
Dari program di atas dapat diketahui bahwa penghitungan waktu dimulai tepat
pada saat sensor 1 tertutup dan penghitungan akan berhenti pada saat sensor 2
tertutup. Dimana pada keadaan ini P1.0 dan P1.1 mendapatkan trigger negatif. Hal ini
dapat digambarkan pada gambar di bawah ini.
t (ms) Sensor 1
Sensor 2
Gambar 4.1 Diagram penghitungan waktu antara sensor 1 dengan sensor 2
c. Program untuk subrutin penghitungan kecepatan
Mov A,#180
Mov B,R0 ;Pembagi pindah ke B
Div AB ;Pembagian A dgn B
Push Acc ;Simpan hasil bagi di stack
Mov B,#10
Mul AB ;Hasil bagi x 10
Mov R1,A ;Simpan di R1
Mov B,R0 ;Pembagi di B
Pop Acc ;Munculkan hasil bagi pertama
Mul AB ;Kalikan hasil bagi dgn pembagi
Mov 50H,A ;simpan di Ram 50H
Push Acc ;simpan di stack
Pop Acc ;Munculkan selisih dr pembagian pertama
Div AB ;bagi dgn pembagi yg telah dibagi 10
Add A,R1 ;jumlahkan dgn hasil bagi pertama
Mov 60H,A
Ajmp Konversi ;bila selisih < 25 maka
Mov B,#10 ;
Mul AB ;kalikan selisih pembagian pertama dgn 10
Mov B,R0 ;
Div AB ;bagi selisih yang telah di x10 dgn pembagi
Add A,R1 ;jumlahkan dgn hasil bagi pertama
Mov 60H,A
d. Program untuk subrutin membunyikan alarm
Banding:
Mov A,60H
Subb A,70H
JC ADACARRY ;Setpoint diatas kec. terukur ada carry
e. Program subrutin untuk menampilkan kecepatan
Display:
Setb P3.7 ;Enablekan input display kecepatan
Acall Delay_5mS
Acall Delay_5mS
Acall Delay_5mS
Mov A,R5
Acall Serial_out ;kirim kec. melalui serial port
Mov A,R6
Acall Serial_out ;kirim kec. melalui serial port
Mov A,R7
Acall Serial_out ;kirim kec. melalui serial port
Clr P3.7 ;Disable display kecepatan
IV. HASIL DAN PEMBAHASAN
IV.1. HASIL
Untuk mengetahui ketelitian alat yang telah dirancang maka dilakukan suatu
pengujian. Hasil pengukuran kecepatan yang diperoleh dibandingkan dengan
kecepatan secara teori.
Hasil dari pengujian ini ditunjukkan pada tabel 4.1.
Tabel 4.1 Pengujian alat secara keseluruhan
IV.2. PEMBAHASAN
Persamaan yang digunakan untuk perhitungan persentase (%) kesalahan adalah :
% kesalahan =
Sehingga dengan menggunakan persamaan (1) diperoleh % kesalahan untuk
pengukuran kecepatan seperti ditunjukkan pada tabel 4.2.
Set point
Tabel 4.2. Persentase (%) kesalahan pengujian alat akibat kesalahan dalam penentuan
waktu tunda 1ms
Besarnya persentase ralat akibat kesalahan dalam menentukan jarak dua sensor adalah
sebagai berikut:
a. jarak antara dua sensor secara teori = 50 cm
b. jarak antara dua sensor pada rangkaian (praktek) = 50,2 cm
Vpraktek
1 17 17,575 106,305 102,413 3,271%
2 28 28,948 64,542 62,179 3,274%
Tabel 4.3. Persentase (%) kesalahan pengujian alat akibat kesalahan dalam
menentukan waktu tunda dan jarak dua sensor
V. KESIMPULAN DAN SARAN
V.1. Kesimpulan
Berdasarkan penelitian dan uji coba maka dapat diambil beberapa kesimpulan
sebagai berikut.
1. Berdasarkan hasil yang diperoleh pada uji coba maka alat ini berfungsi dengan baik
dan sesuai dengan yang diharapkan.
2. Alat ini dapat digunakan untuk mendeteksi kecepatan kenderaan yang melebihi
kecepatan dengan mengaktifkan alarm.
3. Dari pengujian yang dilakukan diperoleh persentase (%) kesalahan rata-rata akibat
kesalahan dalam penentuan waktu tunda sebesar 3,6 %, dan persentase (%)
kesalahan rata-rata akibat kesalahan dalam penentuan waktu tunda dan jarak dua
sensor sebesar 3,2%
V.2. Saran
Setelah melakukan penelitian ini diperoleh beberapa hal yang dapat dijadikan saran
untuk dapat melakukan penelitian lebih lanjut, antara lain :
1. Untuk meningkatkan kinerja alat maka perlu ditambahkan kamera untuk mengenali
kendaraan yang melebihi batas kecepatan.
2. Untuk pengujian sebaiknya dilakukan dengan alat ukur kecepatan digital untuk
memperoleh hasil yang maksimal.
3. Penulis mengharapkan kelanjutan dari perancangan ini dapat memberi manfaat
DAFTAR PUSTAKA
Agfianto.2002. Belajar Mikrokontroler AT89C51/52/55.Yogyakarta: Gava Medan.
Budiharto,Widodo.2005.PerancanganSistemdanAplikasiMikrokontrolerJakarta:.
Daryanto, 2000, Teknik Elektronika, Edisi 1, Jakarta, PT. Bumi Aksara.
Malvino, 1981, Prinsip-prinsip Elektronika, Edisi 2, Erlangga, Jakarta.
Nalwan Paulus Andi, 2003, Teknik Antarmuka dan Pemrograman Mikrolkontroler
AT89C51, Cetakan 2, Jakarta, PT, Elexmedia Komputindo.
Suhata, 2005, Aplikasi Mikrokontroler, Jakarta, PT. Elexmedia Komputindo.