Bab III Satelit Altimetri dan Pemodelan Pasut
III.1 Satelit Altimetri
Sebelum adanya satelit altimetri, stasiun pasut (tide gauge) merupakan sumber data utama untuk memperoleh nilai pasut. Pengukuran yang dihasilkan dari stasiun pasut memiliki beberapa keterbatasan, yang disebabkan oleh jarangnya kerangka stasiun pasut global dan lokasinya yang berada di sepanjang pesisir pantai. Jika dibandingkan dengan stasiun pasut, kelebihan pemanfaatan data satelit altimetri adalah cakupan data yang merata di lautan serta konsistensi referensi posisinya. Namun, kelemahannya adalah pencuplikannya (sampling rate) yang hampir setiap 10 hari sekali, sedangkan pencuplikan dengan alat mistar ukur pada stasiun pasut biasanya dilakukan setiap 30 atau 60 menit sekali.
Data satelit altimetri Topex/Poseidon serta Jason-1 masih memiliki beberapa permasalahan yang menyebabkannya belum dapat menjadi stasiun pasut yang ideal, yaitu:
1. Interval pencuplikan data T/P adalah 9.915642 hari (237.975 jam) yang jauh lebih besar dibandingkan interval waktu pencuplikan (dt) data pasut pada umumnya yaitu setiap 1 jam. Hal ini menyebabkan terjadinya aliasing periode pasut diurnal dan semidiurnal menjadi periode sangat panjang .
2. Masih terdapat kesalahan pada instrumen dan yang terkait dengan media transmisi sinyal yang merupakan kesalahan acak sehingga mempengaruhi kualitas datanya .
3. Resolusi spasial yang lebar antar lintasan sebesar ±30 [Schrama, et al., 1994]. Idealnya, untuk membangun suatu model pasut diperlukan data dengan kerapatan yang lebih kecil.
Peralatan yang terinstalasi pada satelit altimetri didesain khususnya untuk daerah perairan dengan prinsip dasar menghitung waktu tempuh selama perjalanan bolak balik yang dilalui oleh pulsa radar dari antena satelit terhadap permukaan laut. Saat ini, banyak jenis satelit altimetri yang beroperasi memonitoring lautan di
seluruh dunia, bahkan satelit ICESat yang diluncurkan pada Januari 2003 mampu memantau perubahan ketebalan es di Antartika dan Greenland. Teknik satelit altimetri memungkinkan kita untuk memperoleh informasi kedudukan muka air laut di atas referensi tertentu, misalnya permukaan ellipsoid ataupun geoid. Prinsip pengukuran satelit altimetri akan dijelaskan pada sub bab berikut.
III.1.1 Prinsip pengukuran satelit altimetri
Konsep satelit altimetri pertama kali didiskusikan sebagai pemanfaatan teknik satelit untuk bidang keilmuan oseanografi dengan instrumentasi berupa radar pada kongres Williamstown tahun 1969 [http://www.aviso.oceanobs.com]. Satelit altimetri pada mulanya didesain untuk mengukur muka laut dengan memakai teknik radar (digunakan untuk mengukur jarak vertikal dari satelit ke permukaan laut) serta teknik penentuan posisi teliti. Sistem satelit altimetri mulai berkembang pada tahun 1973 dengan peluncuran satelit percobaan Skylab yang diikuti dengan peluncuran misi-misi satelit altimetri lainnya seperti Geosat, ERS-1, ERS-2, Topex/Poseidon(T/P),GFO, Jason-1, ENVISAT, dan lain sebagainya.
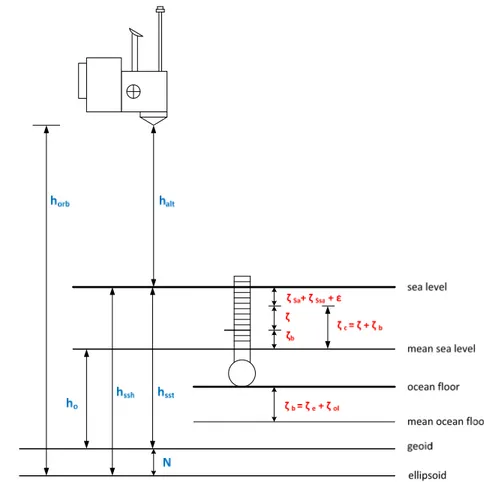
Pada prinsipnya satelit altimetri bertugas mengukur jarak vertikal dari satelit ke permukaan laut. Karena tinggi satelit di atas permukaan ellipsoid referensi diketahui maka tinggi muka laut (sea surface height SSH atau ) saat pengukuran dapat ditentukan sebagai selisih antara tinggi satelit ( ) dengan jarak vertikal ( ). Nilai SSH yang diperoleh akan bervariasi setiap saat sesuai dengan waktu pengukuran dan masih mengandung efek variasi periode pendek seperti pasang surut, loading tide, dan lain sebagainya .
Prinsip pengukuran satelit altimetri secara sederhana terlihat pada persamaan (3.1) berikut ini :
Tinggi satelit altimetri dapat diketahui dari sejumlah teknik penjejakan (tracking) yang terpasang pada badan satelit altimetri, misalnya seperti DORIS, SLR, PRARE dan GPS. Altimeter radar memancarkan pulsa-pulsa gelombang elektromagnetik ke permukaan laut, pulsa-pulsa tersebut dipantulkan oleh permukaan laut dan diterima kembali oleh antena penerima pada satelit. Jarak vertikal dari satelit altimetri terhadap permukaan laut diukur dengan menghitung selisih waktu antara saat pemancaran gelombang dan saat pengembalian gelombang elektromagnetik tersebut, seperti pada persamaan (3.2) berikut :
∆
(3.2)
dimana:
: jarak vertikal antara satelit altimetri dengan permukaan laut sesaat : kecepatan perambatan sinyal
∆ : perbedaan waktu tempuh saat pemancaran dan saat penerimaan sinyal
Pada pengamatan dengan satelit altimetri yang teramati saat pengukuran adalah topografi muka laut sesaat yang mengandung komponen statik dan komponen dinamik, sedangkan yang ingin diketahui pada umumnya adalah komponen statik dari topografi muka laut. Dengan demikian untuk mendapatkannya maka komponen dinamik harus dihilangkan dari topografi muka laut sesaat dengan cara mengeliminir efek gelombang,pasang surut, dan variasi tekanan udara.
III.1.2 Koreksi terhadap pengukuran satelit altimetri
Persamaan (3.1) hanya berlaku jika keadaannya ideal dengan asumsi bahwa tidak ada kesalahan pada orbit satelit dan pengukuran jarak altimetri. Tetapi dalam kenyataannya, karena ketidakakurasian model yang diterapkan dalam penentuan orbit, seperti misalnya model gravity dan semua jenis model perturbasi dan kesalahan dalam berbagai sistem penjejakan, tinggi satelit ( ) harus diberikan koreksi untuk menghilangkan pengaruh kesalahan orbit sebelum digunakan untuk memperoleh nilai . Pada tesis ini tidak didiskusikan masalah kesalahan orbit dan diasumsikan merupakan tinggi satelit dengan kesalahan orbit yang cukup kecil diperhitungkan untuk kepentingan pengekstrakan model koreksi pasut dari altimetri.
Jarak dalam persamaan (3.1) seharusnya merupakan jarak sebenarnya dari satelit altimetri terhadap kedudukan muka laut sesaat. Kesalahan pada pengamatan altimetri dapat digolongkan menjadi lima bagian, yaitu [Moody et al, 1996]: kesalahan orbit, kesalahan pada satelit, kesalahan dari media transmisi, kesalahan dari media pantul dan bias geofisika. Perlu diterapkan koreksi terhadap kesalahan dan bias agar diperoleh nilai yang akurat dari satelit altimetri yang digolongkan ke dalam koreksi instrumen, koreksi media transmisi, koreksi media pantul dan koreksi geofisika.
(1) Koreksi Instrumen
Kesalahan yang terjadi pada instrumen satelit termasuk kesalahan yang bersifat acak akibat peralatan elektronik yang terpasang pada satelit altimetri.Koreksi instrumen merupakan bagian dari sistem bias yang mencakup kesalahan Doppler-shift, bias antena, kesalahan nadir, dan beberapa bias kesalahan internal. Umumnya keseluruhan pengaruh kesalahan instrumen dapat ditentukan dan dikendalikan dengan melakukan kalibrasi altimetri dengan survei yang teliti di area tertentu (ground truth).
Kesalahan Doppler-shift karena pergeseran frekuensi Doppler yang disebabkan oleh kecepatan radial satelit. Hal ini akan mengakibatkan adanya perlambatan waktu pengukuran yang pada akhirnya akan mempengaruhi jarak dari satelit altimetri terhadap kedudukan muka laut sesaat.
Center-of-mass offset akan diperhitungkan untuk perbedaan phase center pada antena satelit altimetri tempat menerima pulsa radar yang dipancarkan dan dipantulkan kembali dari permukaan laut. Penghitungan orbit satelit juga didasarkan pada pusat massa satelit ini. Pengukuran satelit altimeter mengacu pada posisi antena radar altimeter yang posisinya tidak berada pada pusat massa satelit. Jarak antara pusat massa satelit dengan posisi radar satelit dinamakan bias antena. Bias ini ditetapkan terlebih dahulu sebelum satelit diluncurkan.
Kesalahan nadir karena penyimpangan dari pancaran sinyal pada arah vertikal karena garis proyeksi titik nadir satelit ke permukaan bumi tidak selalu segaris dengan garis proyeksi tinggi satelit sehingga hasil pengukuran jarak yang didapatkan adalah jarak miring terhadap titik offset dari nadir dan tidak persis berada pada posisi yang terhitung.
(2) Koreksi Media Transmisi
Koreksi media transmisi karena adanya gangguan penjalaran sewaktu pulsa radar melewati lapisan atmosfer. Pulsa radar ini harus melalui ionosfer dan troposfer sebelum mencapai permukaan laut. Koreksi media transmisi ini meliputi koreksi ionosfer, koreksi troposfer kering serta koreksi troposfer basah. Koreksi ionosfer bergantung pada frekuensi gelombang altimetri dan tingkat ionisasi pada lapisan ionosfer. Dampak domain frekuensi 14GHz memberikan koreksi di ionosfer sekitar 5-20 cm [Lorrel, et. al., 1982]. Nilai koreksi ionosfer ini diberikan oleh instrumen yang terpasang pada satelit, misalnya pada Topex/Poseidon terdapat dua buah sensor yang bekerja secara simultan pada frekuensi 13,6 GHz (Kanal Ku) dan 5,3 GHz (Kanal C). Penggunaan dua frekuensi dalam pengukuran altimetri ini dimaksudkan untuk mereduksi bias yang disebabkan oleh lapisan ionosfer.
Koreksi troposfer terbagi menjadi 2 bagian, yaitu koreksi troposfer kering dan basah. Koreksi troposfer kering karena komponen udara kering dalam troposfer tidak dapat diukur langsung oleh sensor, sehingga biasanya koreksi ini menggunakan model tertentu yang sudah ada, misalnya model Saastamoinen (1972). Koreksi troposfer basah karena kadar uap air dalam troposfer dapat diukur dengan sensor microwave radiometer yang merupakan instrumen pada satelit altimetri.
(3) Koreksi Media Pantul
Koreksi sea state bias (SSB) merupakan koreksi bias dari jarak altimetri terhadap bagian yang rendah antara dua gelombang laut karena permukaan laut selalu bergelombang sehingga timbul perbedaan kekuatan pantul pulsa altimeter. Hal ini muncul dari tiga dampak yang saling berhubungan, yaitu tracker bias, skewness bias dan electromagnetic bias. Bias eletkromagnetik yaitu perbedaan antara muka laut rata-rata dengan muka pantulan rata-rata yang disebabkan oleh tingkat kekasaran muka laut yang tidak homogen sedangkan skewness bias merupakan beda tinggi antara muka pantulan rata-rata dengan muka pantulan rata-rata yang diukur oleh penjejak di satelit, yang disebabkan oleh distribusi tinggi muka laut yang tidak normal.
(4) Koreksi Geofisik
Dinamika yang terjadi di permukaan laut ini menimbulkan bias geofisika pada pangukuran yang dilakukan satelit altimetri. Koreksi geofisik ini meliputi koreksi macam-macam pasang surut yang terdiri dari pasut laut (ocean tide), pasut pembebanan (loading tide), pasut bumi padat (solid earth tide), pasut kutub (pole tide) dan pasut atmosfer.
Pasut laut merupakan suatu model gangguan pada permukaan laut yang timbul karena adanya faktor gaya tarik menarik matahari dan bulan terhadap bumi. Jika dibandingkan dengan pasut lainnya, pasut laut memberikan kontribusi yang besar dalam dinamika perubahan muka laut dan bersifat periodik terhadap waktu yang cukup singkat, yaitu semidiurnal, diurnal dan periode panjang antara ± 15 hari sampai satu tahun. Terdapat macam-macam model koreksi pasut yang ada saat ini, misalnya model global GOT (Global Ocean Tide), FES (Finite Element Solution), dan lain sebagainya
Perubahan naik turunnya permukaan air di permukaan bumi menyebabkan lapisan kerak bumi akan mengalami pembebanan atau tekanan. Jika air lautnya naik (pasang) maka beban atau tekanan di kerak bumi akan besar dan sebaliknya. Pasut ini dinamakan sebagai pasut pembebanan. Schwiderski (1980) mengaproksimasi besarnya pasut pembebanan adalah 7 % dari nilai pasut laut. Dalam hal ini diasumsikan nilai koreksi pasut pembebanan adalah 7% dari nilai koreksi pasut laut.
Pasut bumi padat adalah gangguan akibat gaya gravitasi benda langit terhadap bagian bumi padat, sedangkan pasut kutub disebabkan karena sumbu rotasi bumi berosilasi terhadap kerangka inersial dengan periode 12 sampai 14 bulan. Periode pasut kutub cukup panjang sehingga dapat dianggap setimbang terhadap pasut laut dan bumi padat Koreksi terhadap kedua pasut ini harus diterapkan pula dalam melakukan koreksi geofisik untuk memperoleh jarak altimetri yang aktual.
Jika tekanan atmosfer meningkat ataupun menurun, maka permukaan laut pun merespon secara hidrostatis naik dan turun pula. Pengaruhnya terhadap tinggi permukaan laut adalah setiap tekanan atmosfer bertambah 1 mbar maka akan menurunkan permukaan laut sebesar 1 cm. Koreksi akibat adanya pasut atmosfer ini disebut inverse barometer yang dapat dihitung besarnya dari nilai koreksi troposfer kering [Benada, 1996].
Umumnya banyak penelitian yang mengkategorikan koreksi media pantul, koreksi media transmisi serta koreksi geofisik sebagai koreksi lingkungan. Dengan mempertimbangkan semua koreksi yang telah dijelaskan sebelumnya, maka diharapkan kita memperoleh nilai topografi muka laut komponen statik yang tereduksi dari kesalahan dan bias, sehingga persamaan (3.1) ini dapat kita tuliskan kembali menjadi persamaan (3.3) berikut :
(3.3)
dimana adalah koreksi instrumen, adalah koreksi ionosfer, adalah koreksi troposfer kering, adalah koreksi troposfer basah, adalah koreksi sea state bias, adalah koreksi pasut laut, adalah koreksi pasut pembebanan, adalah koreksi pasut bumi padat, adalah koreksi pasut kutub, adalah koreksi inverse barometrik dan menandakan adanya noise dalam pengukuran.
Koreksi media transmisi, media pantul maupun geofisik dapat diamati dan diekstrak pada sinyal altimetri berdasarkan studi kajian kita. Jika kita menginginkan informasi tinggi muka laut terhadap referensi tertentu, tentunya semua data pengukuran harus dikoreksikan dan dihilangkan dari pengamatan. Untuk keperluan pemodelan pasut, informasi muka laut yang dianalisis harus masih mengandung efek pasut laut dan pasut pembebanan berdasarkan persamaan (3.3). Dalam tesis ini informasi yang diinginkan yaitu tinggi muka laut yang masih mengandung efek pasut laut murni yang terbebas dari efek pasut
pembebanan, sehingga diterapkan koreksi pasut pembebanan berdasarkan model pasut yang ada dalam basis data RADS yaitu model FES2004.
III.2 Pemodelan pasang surut laut
Berdasarkan persamaan (3.1) dan (3.3), setelah diaplikasikan koreksi instrumen dan koreksi lingkungan pada pengamatan kecuali untuk koreksi pasut laut, maka tinggi muka laut sesaat dari satelit altimetri terhadap referensi ellipsoid dapat dituliskan pada persamaan (3.4) berikut :
(3.4) Dimana topografi muka laut ( ) merupakan deviasi muka laut terhadap referensi geoid, adalah undulasi geoid yang merupakan perbedaan antara ellipsoid dan geoid, adalah sinyal pasut laut, dan adalah noise dalam pengukuran. Dalam penentuan topografi muka laut menggunakan satelit altimetri, jarak yang dihasilkan dari pengukuran satelit ke permukaan laut sesaat yang pada awalnya direferensikan terhadap ellipsoid, kini dikonversi menjadi tinggi muka laut terhadap geoid.
(3.5) Dengan demikian tinggi permukaan laut di atas geoid ( ) yang masih mengandung sinyal pasut dan noise pengukuran dapat ditentukan dengan persamaan berikut :
(3.6) Topografi dinamik permukaan laut ( ) dalam tesis ini dinyatakan relative terhadap muka laut rata-rata sebagai bidang referensi pengganti untuk menyatakan topografi muka laut di atas geoid, yang disebut MSS (mean sea surface). MSS secara geometri diasumsikan ekuivalen dengan undulasi geoid dan rata-rata Mean Dynamic Topography (MDT). Adapun MSS yang digunakan adalah CLS01 yang
tersedia pada RADS (Radar Altimeter Database System). MSS CLS01 dibangun dari data-data pengamatan satelit altimetri T/P, ERS-1, ERS-2 dan Geosat mulai tahun 1993-1999 dengan tujuan untuk memberikan informasi rata-rata tinggi muka laut dengan kepresisian yang tinggi di sepanjang groundtrack satelit altimetri serta memberikan data-data yang homogen untuk data Mean Dynamic Topography (MDT).
Satelit altimetri berkontribusi besar dalam studi pasut laut. Terdapat banyak metode untuk mendapatkan model pasut dari data satelit altimetri. Le Provost (2001) mengelompokkannya kedalam empat kelompok, yaitu:
1. Analisis langsung dari satelit altimetri.
2. Analisis dari data residu, yaitu data tinggi muka laut dari satelit setelah dikoreksi dengan model pasut awal (model pasut a priori) [Hwang, et.al., 1997].
3. Analisis data residu setelah dilakukannya ekspansi dengan fungsi Proudman.
4. Metode inverse yang menyertakan persamaan hidrodinamika yang dikendala dengan asimilasi data satelit altimetri
Pada umumnya terdapat tiga jenis metode untuk melakukan pemodelan pasut yang diaplikasikan untuk mengembangkan model pasut. Pada bagian ini akan dijelaskan gambaran singkat model pasut global yang sering digunakan berdasarkan metodologi yang digunakannya.
III.2.1 Model Hidrodinamika
Model hidrodinamika pasut diturunkan dari solusi persamaan Laplace (LTE-Laplace Tidal Equation) yang menggunakan data batimetri termasuk konfigurasi dasar laut dan garis pantai sebagai syarat batasnya. Model hidrodinamika ini termasuk kedalam pemodelan pasut secara numerik. Gaya-gaya yang ditinjau tidak hanya gaya pembangkit pasut dan gravitasi, tetapi melibatkan pula gradien tekanan dan gaya gesekan. Keuntungan pemodelan numerik ini adalah dapat memodelkan pasut bumi padat, pasut pembebanan dan pengaruhnya ke dalam
persamaan yang dinamik. Kelemahan dari model hidrodinamika yaitu masih belum tepatnya pemodelanpenghamburan energi akibat gesekan pada dasar laut. Salah satu cara untuk mengatasi kelemahan ini yaitu meningkatkan resolusi, menggunakan metode finite element yang dapat meningkatkan pemodelan terhadap perubahan kedalaman laut, penghalusan grid pada daerah perairan dangkal serta mendeskripsikan ketidakteraturan garis pantai [Le Provost, 2001]. Salah satu model hidrodinamika yang dikembangkan oleh Le Provost (1994) adalah model FES94.1. Model ini dibangun berdasarkan persamaan non linier barotropik perairan dangkal, yang pada mulanya diformulasikan oleh Le Provost dan Vincent (1986), dengan parameterisasi gesekan dasar yang akibat kecepatan pasut lokal dan gaya potensial pembangkit pasut astronomis termasuk pasut bumi padat, pasut pembebanan dan pengaruhnya. Persamaan ini kemudian diselesaikan secara numerik dengan metode finite element. Model FES94.1. meliputi seluruh dunia dengan resolusi 0.50x0.50 dengan 13 konstanta pasut, yaitu 8 konstanta utama semidiurnal dan diurnal ( , , , , 2 , , , yang didapatkan dari hasil simulasi, serta 5 konstanta lainnya yaitu ( , , , , .
III.2.2 Model Empirik
Model empirik mulai banyak berkembang sejak diluncurkannya berbagai misi satelit altimetri. Model ini diturunkan dengan mengekstrak sinyal pasut dari data pengamatan satelit altimetri. Model empirik pasut yang didapatkan adalah total pasut geosentrik yang mencakup juga pasut pembebanan. Model ini secara langsung dapat digunakan sebagai koreksi pasut pada data altimetri. Pada umumnya terdapat dua cara untuk mendapatkan nilai model koreksi pasut tersebut, yaitu analisis langsung dari data altimetri yang digunakan atau analisis langsung dari data residu altimetri. Pada metode pertama, solusi pasut didapatkan dengan menganalisis data dari altimetri tanpa menerapkan model pasut awal (a priori), sedangkan pada model kedua residu tinggi muka laut didapat setelah menerapkan model pasut awal pada data pengamatan altimetri, yang biasanya dsebut “residual tide solution”. Data residu ini kemudian dianalisis kemudian hasilnya ditambahkan kembali ke dalam model koreksi pasut awal yang
digunakan untuk mendapatkan nilai model koreksi pasutnya. Pada tesis ini dilakukan metode pertama dengan menganalisis data altimetri yang masih mengandung sinyal pasut laut.
Model empirik pertama yang diturunkan dari satelit altimetri adalah model yang dibuat oleh Cartwright dan Ray (1990, 1991) berdasarkan analisis satelit Geosat selama kurun waktu 2,5 tahun menggunakan analisis response method. Terdapat lebih dari 20 model global pasut yang telah dikembangkan dari data satelit altimetri. Beberapa model tersebut antara lain :
Model DW95 merupakan model empirik murni yang dibuat oleh Desai dan Wahr (1995,1997) dengan versi terbarunya yaitu 7.0 dibuat dengan menggunakan data pengamatan satelit T/P cycle 10-229. Analisis yang digunakan adalah response method, yang menghasilkan komponen pasut semidiurnal, diurnal, komponen periode panjang (monthly, fortnightly dan termensual). Analisisnya menghasilkan informasi pasut dengan resolusi bujur 2.8340 dan resolusi lintang 10 kemudian dilakukan smoothing menjadi 10x10 dengan cakupan wilayah ±660 yang sesuai dengan karakteristik cakupan wilayah satelit altimetri T/P. Untuk wilayah diluar ±660 digunakan model pasut Schwiderski.
Model CSR4.0 merupakan revisi dari versi CSR3.0 yang dibuat oleh Eanes dan Bettadpur (1995). Model ini dibangun demgan menggunakan data satelit T/P selama 6,4 tahun dengam menggunakan orthotide method. Resolusi model pasut yang diberikan adalah grid berukuran 30x30 yang kemudian dilakukan smoothing dengan cara konvolusi 2-D Gaussian sehingga dihasilkan output grid berukuran 0,50x0,50.
Model GOT99.2 merupakan versi revisi dari model yang dikembangkan oleh NASA-GSFC, atau lebih dikenal dengan SR94 (Schrama dan Ray, 1994), SR95.0/.1, dan versi lainnya. Sebanyak 232 cycle data altimetri T/P digunakan untuk mendapatkan solusi 8 komponen utama konstanta pasut semidiurnal dan diurnal ( , , , , , , , . Versi terbaru dari model ini yaitu GOT00.2
yang melibatkan 286 cycle data pengamatan satelit T/P ditambah dengan 81 cycle data satelit ERS-1/2 periode 35 hari dengan menggunakan proses asimilasi untuk mengisi data di wilayah perairan dangkal dan wilayah kutub. Selain menggunakan model FES94.1 sebagai model a priori , model ini menggunakan juga beberapa model hidrodinamika lokal (ftp://iliad.gsfc.nasa.gov/ray/GOT00.2). Model pasut GOT00.2 ini memberikan resolusi grid 0,50x0,50.
III.2.3 Model Asimilasi
Berbeda dengan model hidrodinamika, model empirik tidak memerlukan informasi batimetri, geometri garis pantai, ataupun asumsi mengenai penghamburan energi, koefisien gesekan dasar laut serta menyelesaikan solusi persamaan hidrodinamika. Model empirik diturunkan langsung dari data pengamatan satelit altimetri. Walaupun demikian terdapat beberapa kelemahan dalam membuat model pasut secara empirik, diantaranya adalah timbulnya masalah aliasing karena periode pencuplikan data dari satelit altimetri, keterbatasan cakupan spasial, dan resolusi spasial pencuplikan data yang berbeda-beda tiap misi satelit altimetri. Khususnya untuk perairan dangkal yang dekat dengan daerah pesisir, data satelit altimetri memiliki resolusi yang tidak akurat. Disisi lain, pemodelan pasut menggunakan model hidrodinamika akan memberikan hasil yang baik untuk daerah perairan dangkal jika tersedia informasi data batimetri, koefisisn gesekan dasar laut, dan parameter lainnya yang. Oleh karena itu dikembangkan metode asimilasi yang dapat menyelesaikan persamaan hidrodinamika dengan asimilasi data stasiun pasut dan data altimetri. Berikut diberikan berapa contoh model asimilasi dan penjelasan ringkasnya.
Model NAO99.b merupakan model pasut global yang dikembangkan oleh Matsumoto et. al. (2000). Program bernama naotide dibuat untuk memprediksi tinggi pasut laut berdasarkan waktu dan lokasi dengan menggunakan model pasut yang dikembangkan dengan asimilasi 5 tahun data altimetri T/P (cycle 10-198) ke dalam model barotropik hidrodinamik. Model jangka pendek pasut dalam naotide digunakan untuk menghasilkan 16 konstanta pasut, yaitu
pasut dan resolusinya diberikan pada tabel 3.1. Komponen pasut terdiri dari model tersebut mencakup komponen utama semidiurnal (M2, S2, N2, K2), diurnal (K1, O1, P1), periode panjang (Mf, Mm, Ssa), dan komponen tambahan perairan dangkal (2SM2, MNS2, MK3, M4, MS4).
Tabel III.1 Karakteristik model pasut NAO.99b
Model Area Resolusi
Model Global (NAO.99b) 00-3600 BT, 900LU-900LS 0.50
Model Regional sekitar Jepang (NAO.99Jb) 1100BT-1650BT, 200LU-650LS 5’
Model TPXO.6.2 adalah model global pasut yang dikembangkan oleh Egbert et al. (1994, 2002) menggunakan skema inverse OTIS (Oregon State University Tidal Inversion Software) untuk mengasimilasi data pengamatan ke dalam persamaan hidrodinamik. Model pasut yang dihasilkan adalah model global dengan resolusi spasial 0.250x0.250 yang meliputi 8 komponen pasut utama ( , , , , , , , serta 2 komponen periode panjang 15 harian dan bulanan , .
Model FES99 merupakan pengembangan dari model sebelumnya FES98 (Lefevre et al., 2000) yang mengasimilasi data stasiun pasut, tidak termasuk data altimetri. Tetapi kemudian pada model FES99 mulai digunakan asimilasi dari data stasiun pasut dan data dari berbagai misi satelit altimetri untuk meningkatkan akurasi model pasut yang dihasilkan. Seri terbarunya adalah FES2004 yang memperbaharui model FES2002 dan FES99 dihitung dari persamaan hidrodinamika serta asimilasi data satelit altimetri dan stasiun pasut. Stasiun pasut yang digunakan dalam asimilasi ini memiliki kualitas yang baik, seperti data set dari World Ocean Circulation Experiment (WOCE), terdiri dari 400 stasiun pasut berlokasi di sepanjang pantai dan pulau, data set dari IAPSO yang terdiri dari 352 stasiun pasut berlokasi di wilayah perairan dalam terutama di perairan Atlantik Utara dan Samudera Pasifik, dan data set dari stasiun pasut ST102 yang ada di perairan dalam.
Resolusi model FES99 adalah grid 0.250 x 0.250 dan model FES2004 menjadi lebih baik yaitu grid 0.1250 x 0.1250. Dengan semakin banyaknya data stasiun pasut yang digunakan maka resolusi spasial model pasutnya untuk perairan pesisir pun menjadi lebih baik, yaitu dari 10 km dari garis pantai pada FES99 menjadi 7.5 km pada FES2004. Sampai saat ini model FES2004 menjadi model global yang paling akurat [Lyard, et. al., 2006]. Terdapat 20 konstanta pasut yang dianalisis untuk data altimetri T/P dan 19 konstanta pasut untuk data altimetri ERS termasuk komponen semidiurnal, diurnal dan komponen perairan dangkal. Untuk komponen periode panjang tidak dihitung dari data asimilasi dengan alasan bahwa terdapat nilai signal-to-noise ratio yang kurang baik dari data pengamatan muka laut. Pada periode ini biasanya masih mengandung sinyal non-tidal. Konstanta harmonik yang didapatkan dari analisis tersebut tidak terlalu berarti untuk digunakan dalam pemodelan global kecuali untuk konstanta harmonik yang dominan di area perairan tropis [Ponchaut et al. 2001].
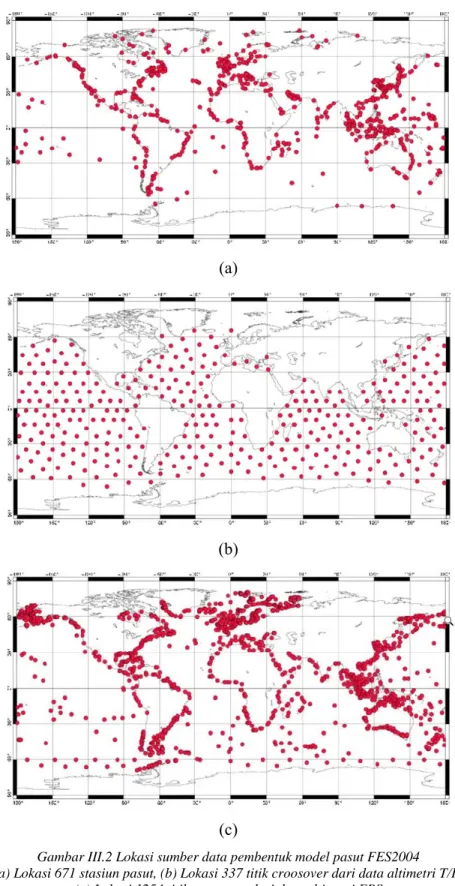
Berikut diperlihatkan posisi 671 stasiun pasut, 337 titik crossover dari data altimetri T/P, dan 1254 titik crossover dari data altimetri ERS yang digunakan dalam asimilasi pembentukan model FES2004.
(a)
(b)
(c)
Gambar III.2 Lokasi sumber data pembentuk model pasut FES2004 (a) Lokasi 671 stasiun pasut, (b) Lokasi 337 titik croosover dari data altimetri T/P,
3.3 Tidal Aliasing
3.3.1 Tidal aliasing pada satelit altimetri
Orbit satelit T/P telah didesain agar frekuensi komponen pasut tidak teralias menjadi nol, setengah tahunan atau bahkan tahunan. Interval pencuplikan data T/P adalah 9.9156 hari (237.975 jam) yang jauh lebih besar dibandingkan interval waktu pencuplikan (dt) data pasut pada umumnya yaitu setiap 1 jam. Dengan pengamatan dt =1 jam akan mencerminkan karakter fenomena pasut, sedangkan jika dt 1 jam maka semakin tidak menggambarkan fenomena pasut sebenarnya. Hal ini dikatakan sebagai fenomena aliasing frekuensi komponen pasut, yaitu berubahnya frekuensi asli komponen pasut menjadi frekuensi palsu (alias) yaitu nol, setengah tahunan, maupun tahunan. Gelombang pasut diurnal dan semidiurnal ter-aliaskan kedalam gelombang berfrekuensi rendah, ketika dicuplik dengan interval satelitnya, selalu lebih besar dari 1 hari. Satelit T/P telah dibentuk dengan tujuan untuk meminimalisasi masalah aliasing terutama pada komponen utama pasut agar tidak ter-aliasing ke dalam gelombang frekuensi rendah.
Periode atau frekuensi alias dapat dihitung dengan menggunakan banyak metode, diantaranya adalah metode pelipatan (folding) atau metode Phase Advance. Nilai frekuensi hasil pelipatan atau frekuensi alias sebanding dengan frekuensi aslinya. Pembuktian mengenai hal ini dapat dilihat dalam Emery et al, 1997. Kedua metode penentuan frekuensi alias, baik metode pelipatan (folding) maupun metode yang meninjau perubahan fase setelah satu kali revolusi (phase advance) memberikan hasil yang mirip.
Frekuensi alias adalah frekuensi yang menyamar sebagai frekuensi lain. Dikretisasi yang buruk terhadap data time series mengakibatkan terjadinya aliasing suatu frekuensi menjadi frekuensi alias atau palsu. Ilustrasinya, untuk suatu data diskrit dengan interval waktu (dt) yang sama maka hanya komponen frekuensi yang ada dalam kisaran frekuensi utama yang dapat ditentukan. Kisaran frekuensi utama tersebut adalah sebagai berikut [Emery, et. al., 1997]:
, , 0 (3.7) , , 0 (3.8) dengan :
∆ dan ∆
= frekuensi Nyquist (frekuensi utama) = 0
Frekuensi yang dapat dianalisis adalah frekuensi komponen pasut yang berada dalam kisaran frekuensi nol sampai frekuensi Nyquist. Jika frekuensi komponen pasut berada diluar kisaran tersebut maka tidak dapat dianalisis. Pencuplikan data dengan dt yang makin besar akan menghasilkan grafik tinggi pasut yang kurang periodik sehingga tidak mencerminkan fenomena pasang surut yang periodik. Selain itu, semakin besar dt, maka akan semakin sempit kisaran frekuensi utama dan frekuensi komponen yang akan dianalisis menjadi semakin jauh dari kisaran frekuensi utama. Agar dapat dianalisis, frekuensi yang berada di luar kisaran frekuensi utama harus ditentukan frekuensi aliasnya yang berada di dalam kisaran frekuensi utama dengan cara folding (pelipatan) balik (ke kiri).
Frekuensi suatu komponen yang berada diluar kisaran frekuensi utamanya dapat ditentukan frekuensi aliasnya. Bila suatu frekuensi komponen , akibat dt yang besar, tidak berada dalam kisaran utama 0 dan , melainkan terletak pada kisaran
dan 1 , maka nilai pada kisaran 1 dan 2 diperoleh dengan menggunakan persamaan berikut [Emery, et al, 1997]:
(3.9) dengan
k = bilangan lipatan p = komponen pasut p
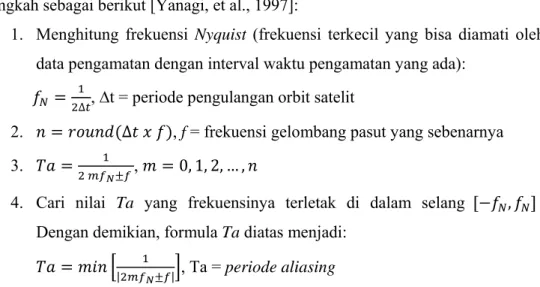
Frekuensi aliasing dihitung dengan metode folding menggunakan langkah-langkah sebagai berikut [Yanagi, et al., 1997]:
1. Menghitung frekuensi Nyquist (frekuensi terkecil yang bisa diamati oleh data pengamatan dengan interval waktu pengamatan yang ada):
∆ , ∆t = periode pengulangan orbit satelit
2. ∆ , f = frekuensi gelombang pasut yang sebenarnya
3. , 0, 1, 2, … ,
4. Cari nilai Ta yang frekuensinya terletak di dalam selang , . Dengan demikian, formula Ta diatas menjadi:
| | , Ta = periode aliasing
Berikut adalah penentuan periode ( ) dan frekuensi alias komponen pasut utama dengan cara pelipatan dengan dt = 237.975 jam (periode Topex)
Tabel III.2 Frekuensi alias komponen pasut
No Komponen Frekuensi T asli Frek_asli Frek_asli T alias Frek_ alias Frek_alias
Pasut (0/jam) (hari) (cph) (cpd) (day) (cpd) (cph)
Komponen Periode Panjang 1 Sa 0.04107 365.26033 0.00011 0.00274 365.26033 0.00274 0.00011 2 Ssa 0.08210 182.70402 0.00023 0.00547 182.70402 0.00547 0.00023 3 Mm 0.54441 27.55276 0.00151 0.03629 27.55276 0.03629 0.00151 4 Mf 1.09800 13.66120 0.00305 0.07320 36.16538 0.02765 0.00115 Komponen Diurnal 5 QI 13.39870 1.11951 0.03722 0.89325 69.39556 0.01441 0.00060 6 O1 13.94300 1.07581 0.03873 0.92953 45.71111 0.02188 0.00091 7 NO1 14.49670 1.03472 0.04027 0.96645 23.77505 0.04206 0.00175 8 P1 14.95890 1.00275 0.04155 0.99726 88.90811 0.01125 0.00047 9 S1 15.00000 1.00000 0.04167 1.00000 117.54240 0.00851 0.00035 10 K1 15.04110 0.99727 0.04178 1.00274 173.38330 0.00577 0.00024 11 J1 15.58540 0.96244 0.04329 1.03903 32.76637 0.03052 0.00127 12 OO1 16.13910 0.92942 0.04483 1.07594 14.82966 0.06743 0.00281 Komponen Semi Diurnal 13 2N2 27.89540 0.53772 0.07749 1.85969 22.53282 0.04438 0.00185 14 MU2 27.96820 0.53632 0.07769 1.86455 19.37319 0.05162 0.00215 15 N2 28.43970 0.52743 0.07900 1.89598 49.54326 0.02018 0.00084 16 NU2 28.51260 0.52608 0.07920 1.90084 65.25550 0.01532 0.00064 17 M2 28.98410 0.51753 0.08051 1.93227 62.07728 0.01611 0.00067 18 L2 29.52850 0.50798 0.08202 1.96857 19.08314 0.05240 0.00218 19 T2 29.95890 0.50069 0.08322 1.99726 50.61975 0.01976 0.00082 20 S2 30.00000 0.50000 0.08333 2.00000 58.77120 0.01702 0.00071 21 K2 30.08210 0.49864 0.08356 2.00547 86.64158 0.01154 0.00048
3.3.2 Kriteria Rayleigh dan Periode Sinodik Aliasing
Banyaknya gelombang pasut yang dapat diuraikan sangat bergantung kepada panjangnya data. Kriteria yang dipakai untuk menentukan komponen apa saja yang dapat dihitung adalah kriteria Rayleigh, yaitu dua komponen pasut A dan B hanya dapat dipisahkan satu sama lain apabila panjang datanya melebihi suatu periode tertentu yang disebut sebagai periode sinodik. Bila kecepatan dua komponen pasut adalah dan (0/jam), maka periode sinodiknya (PS) adalah sebagai berikut [Ali, et al., 1994]:
dalam jam (3.10)
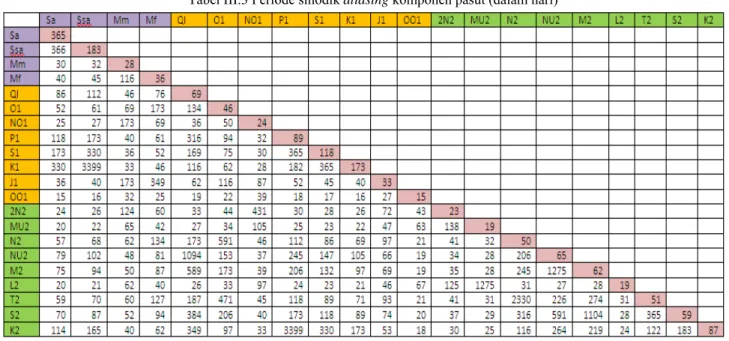
Untuk data T/P, karena periode aliasnya telah dihitung, maka penentuan periode sinodiknya dapat dihitung dengan persamaan berikut [Hwang, et al., 1997]:
.
(3.11) Dengan dan masing-masing adalah dua periode alias komponen pasut yang akan ditentukan periode sinodiknya. Berikut adalah periode sinodik komponen pasut untuk data T/P dengan dt=237.975 jam atau 9.9156 hari.