BAB II
TINJAUAN PUSTAKA
2.1 PENDAHULUAN
Pada bab ini akan menjelaskan tentang pengertian roket, cara kerja roket, komponen-komponen roket dan beberapa parameter yang berkaitan dengan perancangan roket. Semua karakteristik dan teori perhitungan akan dijelaskan di bab ini.
2.2 PENGERTIAN ROKET PADAT
Secara umum pengertian roket padat adalah kendaraan pembawa atau pendorong yang berisi muatan tertentu ke suatu tempat atau lokasi yang sudah ditetapkan dengan mendapat dorongan melalui pembakaran propelan padat, didalam ruang bakar motor roket padat terdapat perubahan energi kimia bahan bakar menjadi energi panas. Selanjutnya energi panas akan menghasilkan tekanan yang dapat menimbulkan gaya dorong melalui nosel roket, sehingga roket dapat bergerak ke arah berlawanan dengan arah dorong tersebut dan kemudian menghasilkan energi kinetik berupa gerakan roket meluncur ke tujuan (Bintoro, 2013, p. 8).
2.3 PRINSIP KERJA ROKET PADAT
Prinsip kerja roket padat diterapkan pada peluru kendali. Peluru kendali atau yang lebih dikenal dengan sebutan rudal adalah senjata yang dihantarkan menuju sasaran yang dihantarkan menuju sasaran melalui proses penerbangan. Untuk mendapatkan waktu mencapai sasaran yang singkat umumnya mempunyai pendorong berbasis roket. Pada sistem rudal terdapat dua cara untuk dapat mencapai sasaran yakni secara
balistik (berhubungan dengan hukum fisika tentang benda jatuh atau gravitasi) dan dengan menggunakan daya angkat aerodinamis. Cara kedua menghasilkan rudal yang lebih efisien, terutama jika menggunakan motor yang menggunakan oksigen dari atmosfer (air-breathing engine) dan mudah dikendalikan karena kecepatannya lebih rendah (Triharjanto, Sofyan, Riyadi, Marian, & Putro, 2010).
2.4 FENOMENA AERODINAMIKA
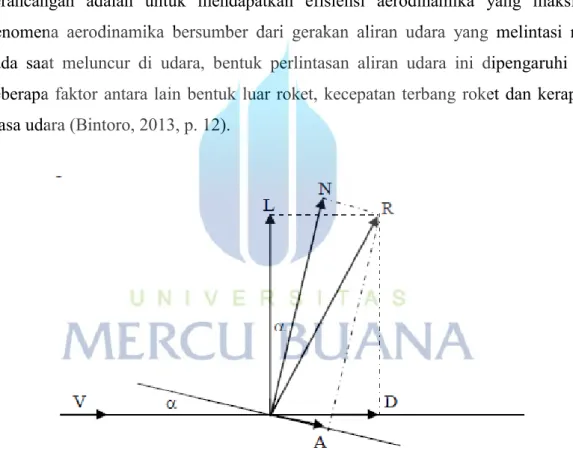
Kecepatan terbang menggunakan Mach number (1 Mach = 342 m/s). Salah satu tujuan perancangan adalah untuk mendapatkan efisiensi aerodinamika yang maksimal. Fenomena aerodinamika bersumber dari gerakan aliran udara yang melintasi roket pada saat meluncur di udara, bentuk perlintasan aliran udara ini dipengaruhi oleh beberapa faktor antara lain bentuk luar roket, kecepatan terbang roket dan kerapatan masa udara (Bintoro, 2013, p. 12).
Gambar 2.1 Penguraian gaya aerodinamika (Sumber: Bintoro, 2013)
Pada saat roket meluncur menembus udara dengan berat jenis ρ, terjadilah gaya aerodinamika yang dapat berupa gaya hambat, gaya angkat dan gaya tekanan. Gaya hambat ditimbulkan oleh aksi geser akibat kecepatan udara sedangkan gaya tekanan
angkat. Posisi gaya-gaya tersebut pada kondisi setimbang di titik tangkap gaya dapat diuraikan ke dalam bentuk gaya normal dan gaya aksi seperti pada gambar 2.1 diatas. Berdasarkan gambar 2.1 dapat dituliskan gaya-gaya sebagai berikut:
𝐷 = 𝐴 cos ∝ + 𝑉 sin ∝ (2.1) 𝐿 = 𝑁 cos ∝ − 𝐴 sin ∝ (2.2) 𝐴 = 𝐷 cos ∝ − 𝐿 sin ∝ (2.3) 𝑁 = 𝐿 cos ∝ + 𝐷 sin ∝ (2.4) Dengan: D = gaya hambat L = gaya angkat A = gaya aksi N = gaya normal V = kecepatan
2.5 PRESTASI KERJA ROKET
Prestasi kerja roket umumnya dilihat dari ketepatan hubungan antara gaya dorong, gaya hambat dan berat roket serta kondisi lingkungan dan cara terbang juga berpengaruh. Gaya dorong roket berhubungan dengan sistem propulsi, gaya hambat berhubungan dengan kinerja aerodinamika, sedangkan berat roket tergantung dari struktur. Masalah-masalah aerodinamika yang berhubungan erat dengan prestasi kerja roket adalah hambatan gesek (Friction Drag), hambatan tekann (Pressure Drag), hambatan interferensi dan trayektori roket (Bintoro, 2013, p. 30).
2.5.1 Hambatan Gesek (Friction Drag)
Dalam aliran kompresibel gesekan permukaan tergantung pada jenis aliran, misalnya turbulen atau laminar dan bilangan Reynold. Koefisien gesekan permukaan untuk aliran turbulen atau laminar sebagai berikut (Bintoro, 2013, p. 31).
2.5.2 Hambatan Tekanan (Pressure Drag)
Hambatan tekanan di dalam aliran subsonik secara umum kecil dan dapat diabaikan dalam studi awal perancangan. Namun di dalam aliran transonik dan supersonik, hambatan tekanan mempunyai pengaruh yang relatif besar dan terjadi secara terus menerus. Pada kecepatan transonik, sebaiknya hambatan tekanan ditentukan berdasarkan eksperimen dan dengan menggunakan bantuan perangkat lunak computer untuk kerja badan roket dan sirip roket. Hambatan tekanan pada badan roket terdiri dari tiga bagian utama yaitu hambatan gelombang hidung roket, hambatan gelombang bagian ekor dan hambatan tekanan bagian dasar badan roket (Bintoro, 2013, p. 32).
2.6 STABILITAS TERBANG ROKET
Stabilitas terbang roket salah satunya tergantung pada stabilitas aerodinamika yang ditentukan oleh letak titik pusat tekanan (Centre of Pressure = CP) dan letak titik pusat massa (Centre of Gravity = CG). CP total dari sebuah roket adalah penjumlahan dari hasil kali antara masing-masing koefisien gaya angkat total CLt dengan jarak
pusat tekanannya ji dibagi dengan koefisien gaya angkat total CLt. Sedangkan CG
total adalah penjumlahan dari hasil kali antara titik pusat massa masing-msaing komponen Wt.
Pada dasarnya stabilitas terbang roket akan tercapai apabila letak titik pusat tekanan CP berada dibelakang CG jika dilihat dari ujung hidung roket, seperti yang terlihat gambar 2.8a, sedangkan pada gambar 2.8b jika CP berada di depan CG, gerak roket akan mengalami momen yang dapat menimbulkan ketidakstabilan gerak sebagai
akibat dari ketidakmampuan gerak roket kembali pada posisi kesetimbangan (Bintoro, 2013, p. 34).
Gambar 2.2 Stabilitas terbang roket (Sumber: Bintoro, 2013) 𝐶𝑃 = ∑ 𝐽𝑖𝐶𝐿𝑖
𝐶𝐿𝑡 (2.5)
Penentuan posisi CP dan CG juga dapat dilakukan dengan menggunakan metode James Barrowman. Untuk menentukan posisi CP, metode ini dimulai dengan membagi komponen roket menjadi beberapa bagian, sedangkan untuk posisi CG dapat ditentukan dengan mengetahui posisi titik pusat bagi seluruh beban pada roket termasuk beban konstruksi, muatan dan parasut. Cara yang paling sederhana adalah dengan menggantung roket dengan benang atau tali secara horizontal dan posisi dimana roket setimbang adalah posisi CG (Bintoro, 2013, p. 36).
Gambar 2.3 Pengukuran posisi CG (Sumber: Bintoro, 2013)
Penentuan posisi CG juga dapat ditentukan melalui perhitungan persamaan: 𝐶𝐺 = 𝑋̅̅̅̅̅ = 𝐶𝐺 ∑ 𝑋𝑊𝑖𝑊𝑘𝑖
𝑡 (2.6)
Dengan mengetahui posisi CP dan CG, maka tingkat kestabilan terbang roket atau static margin (SM) roket dapat diketahui yakni dengan melalui cara perhitungan persamaan:
Relatif stabil jika 𝑆𝑀 = (𝐶𝑃𝐶𝐺) > 1 (2.7) Tidak stabil jika 𝑆𝑀 = (𝐶𝑃𝐶𝐺) < 1 (2.8)
2.7 KOMPONEN UTAMA ROKET PADAT
Komponen utama roket terdiri dari empat bagian yaitu rangka (structure system), muatan (payload system), sistem pemandu (guidance system) dan sistem propulsi (propulsion system).
2.7.1 Rangka (Structure System)
Rangka roket terbagi atas beberapa bagian antara lain:
a. Hidung Roket (Nose Cone)
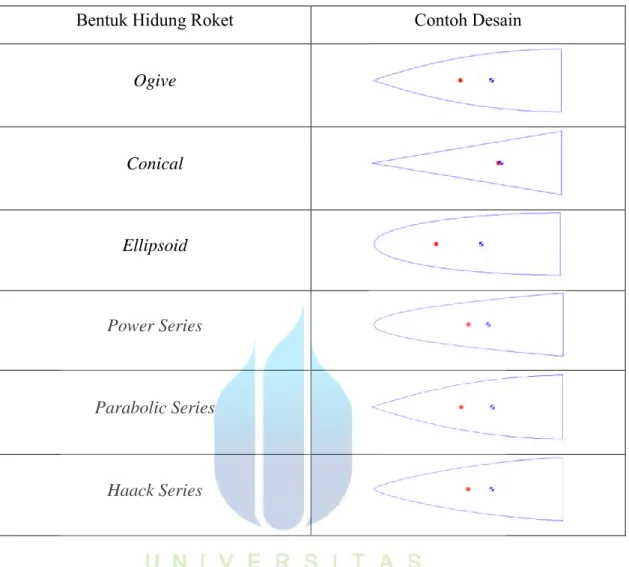
Hidung roket merupakan komponen roket yang berada paling depan dan berfungsi untuk menembus aliran udara pada saat terbang dan akan menerima fenomena aerodinamika yang paling awal baik pada kecepatan subsonik ataupun supersonik (Bintoro, 2013, p. 14).
Tabel 2.1 Jenis-jenis hidung roket
Bentuk Hidung Roket Contoh Desain
Ogive Conical Ellipsoid Power Series Parabolic Series Haack Series
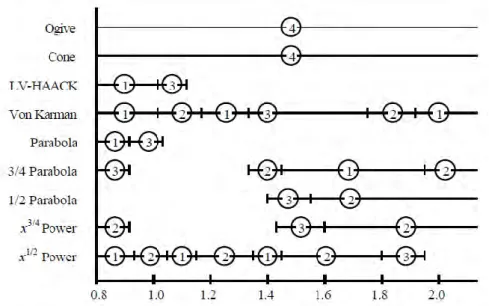
Pada gambar 2.1 dibawah, kita dapat melihat perbandingan antara jenis-jenis hidung roket dengan kualitasnya. Angka 1 menunjukan kualitas sangat baik, angka 2 menunjukan kualitas baik, angka 3 menunjukan kualitas cukup dan angka 4 menunjukan kualitas rendah.
Gambar 2.4 Perbandingan hidung roket dengan mach number (Sumber: Crowell, 2006)
Pada gambar 2.2 dibawah, kita dapat melihat bentuk-bentuk hidung roket power series dengan radius dan axial tertentu.
Gambar 2.5 Ilustrasi hidung roket power series (Sumber: Crowell, 2006)
Untuk menentukan radius dari hidung roket dapat dihitung melalui persamaan di bawah ini: Ogive: 𝑌 = 𝐷2𝑥 [1 − (𝑋+𝐹𝐴 )2] 𝑥 [𝐴𝑃𝐴−𝐹𝑝𝑃] (2.9) Ellipse: 𝑌 = [(𝐷2)𝑃𝑥 [1 − (𝑋𝐿)𝑃]] 1 𝑃⁄ (2.10) Power Series: 𝑌 = 𝐷2𝑥 (1 −𝑋𝐿)𝑃 (2.11) Haack Series: 𝑌 = (𝐷2) 𝑥 [𝜃− 𝑆𝑖𝑛(2𝜃) 2 +𝑃 𝑥 𝑆𝑖𝑛3𝜃 𝜋 ] 1 2⁄ (2.12) Panjang hidung roket minimal adalah 3:1 dengan diameter hidung roket dan umumnya hidung roket dirancang dengan perbandingan 5:1, ada juga yang merancang hidung roket hingga perbandingan 7:1. Perbedaan perbandingan dalam perancangan hidung roket ini berdasarkan pada ketinggian jelajah roket, kecepatan roket dan akselerasi roket. Hidung roket yang semakin panjang akan meningkatkan ketinggian jelajah dan kecepatan roket, namun akan mengurangi akselerasi roket (Ginting & Ismail, 2009).
b. Badan Roket (Body Tube)
Pada umumnya badan roket hanya berbentuk selongsong silinder. Selongsong silinder lebih menguntungkan dibanding dengan bentuk lain dan hingga saat ini belum ditemukan bentuk lain yang lebih baik dari silinder. Namun yang membedakan satu badan roket dengan badan roket yang lain ada pada komposisi material pembuatannya. Pada badan roket terdapat beberapa komponen antara lain (Niskanen, 2013):
Tabel 2.2 Komponen pada badan roket Nama
Komponen Gambar Fungsi
Transition
Bagian ini digunakan untuk menghubungkan badan roket yang berbeda diameter. Bagian ini hanya digunakan jika ingin mengurangi atau menambah diameter roket
Launch Lug
Pada saat roket akan meluncur, kecepatannya sangat rendah untuk fin dapat memperoleh aerodinamika, jadi roket harus diarahkan dengan bantuan
launch rod.
Inner Tube
Didalam badan roket terdapat tabung kecil yang mana digunakan sebagai tempat untuk menyimpan motor roket.
Engine Block
Engine block atau thrust ring
berguna untuk menahan motor untuk bergerak maju pada saat peluncuran.
Centering Ring
Berfungsi untuk menjaga posisi motor tetap berada ditengah,
centering ring ini digunakan
apabila ukuran badan roket lebih besar dibanding motor roket.
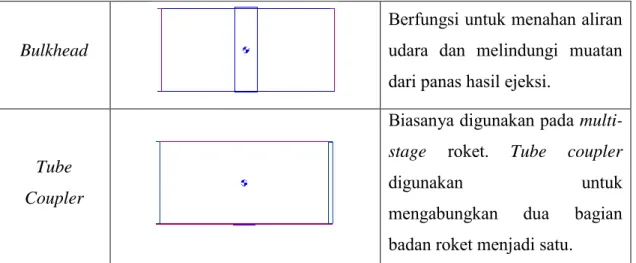
Bulkhead
Berfungsi untuk menahan aliran udara dan melindungi muatan dari panas hasil ejeksi.
Tube Coupler
Biasanya digunakan pada
multi-stage roket. Tube coupler
digunakan untuk mengabungkan dua bagian badan roket menjadi satu.
c. Sirip Roket (Fin)
Komponen roket bagian ekor biasanya terdiri dari beberapa sirip yang berfungsi sebagai pengarah terbang dan penjaga kestabilan terbang roket sehingga tidak terjadi gerakan memutar atau rolling. Gerakan memutar ini adalah salah satu alasan roket terbang keluar dari arah lintasan yang sudah ditentukan. Hal ini dikarenakan pembuatan struktur sirip roket yang tidak tepat, sehingga sirip roket tersebut tidak mampu menerima tekanan aerodinamika (Bintoro, 2013, p. 21).
Gambar 2.6 Bentuk-bentuk sirip roket (Sumber: Bintoro, 2013)
Pada gambar 2.3 diatas, sirip roket A berbentuk persegi panjang, sirip roket B berbentuk persegi panjang terpotong miring, sirip roket C berbentuk trapesium, sirip roket D berbentuk delta dan sirip roket E berbentuk delta miring. Bentuk-bentuk sirip roket akan menghasilkan karakteristik yang berbeda jika digunakan pada kecepatan terbang yang berbeda, misalkan untuk subsonik ataupun supersonik. Selain bentuk sirip, karakteristik aerodinamika juga tergantung pada bentuk belahan airfoil dan
ukuran sudutnya pada ujung sirip. Airfoil adalah bentuk aerodinamika yang dianggap paling efektif untuk menghasilkan gaya angkat dan tenaganya berasal dari gaya dorong roket, yang besarnya lebih besar dari berat roket atau sekurang-kurangnya sama dengan berat roket (Bintoro, 2013, p. 21).
Gambar 2.7 Airfoil dan bentuk-bentuk belahan airfoil (Sumber: Bintoro, 2013)
Pada gambar 2.4a, belahan airfoil yang berbentuk depan belakang tirus, dari sisi efisiensi aerodinamika memiliki gaya hambat yang paling kecil untuk rasio tebal, sedangkan dari sisi manufaktur yang lebih mudah dikerjakan adalah bentuk modifikasi depan belakang tirus seperti yang terdapat pada gambar 2.4b. Bagian depan dan belakang yang tajam perlu diperhalus dalam bentuk tumpul melingkar (rounded), hal ini untuk mengurangi panas karena pengaruh gaya aerodinamika. Bentuk ini digunakan untuk sirip padat yang berukuran relatif kecil. Bentuk depan belakang cembung, gambar 2.4c, memiliki gaya hambat terkecil untuk setiap unit tegangan dan biasa digunakan untuk sirip yang berukuran relatif besar dengan struktur tidak padat. Sedangkan untuk bentuk bagian belakang tumpul seperti yang terdapat pada gambar
Dengan memperhatikan berbagai bentuk sirip maupun belahan airfoil seperti pada gambar diatas, sebenarnya perhitungan beban aerodinamika sirip roket relative sulit ditentukan secara pasti, karena sangat tergantung pada bentuk geometri, luasan sirip dan pengaruh fluida yang dilalui (udara nyata) pada saat terbang. Namun demikian, secara teroritis dapat dikatakan bahwa sirip roket pada saat terbang akan mengalami gaya aerodinamika, baik berupa gaya hambat maupun gaya angkat. Gaya hambat mempunyai arah sejajar dengan arah aliran udara bebas. Posisi masing-masing gaya pada sirip roket dapat dilihat pada gambar 2.11 (Bintoro, 2013, p. 23).
Gambar 2.8 Posisi dan arah gaya aerodinamika sirip roket
(Sumber: Bintoro, 2013) Dari gambar 2.8 diperoleh:
𝐶𝑋 = 𝐶𝑙sin ∝ − 𝐶𝑑cos ∝ (2.13) 𝐶2 = 𝐶𝑙cos ∝ + 𝐶𝑑sin ∝ (2.14) Keterangan gambar:
Lo = Gaya angkat
Vo = Kecepatan udara local
Do = Gaya hambat
Selain untuk kepentingan aerodinamis, fin juga memiliki peranan penting dalam menjaga kestabilan pada saat terbang. Umumnya roket yang tidak memiliki fin, posisi CP akan berada didepan CG. Dengan adanya fin, pusat tekanan akan bergeser
kebelakang CG, dengan begitu roket akan dapat terbang dengan stabil (Niskanen, 2013).
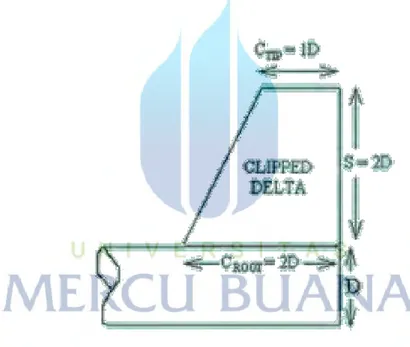
Dalam perancangan fin, perlu diperhatikan bahwa luas permukaan lebih penting dibandingkan dengan panjang fin. Berdasarkan gambar 2.3, fin yang paling baik adalah jenis clipped delta, salah satu alasannya adalah bentuknya yang sejajar dengan nosel roket sehingga dapat mengurangi benturan pada saat mendarat. Pada gambar 2.6 kita dapat melihat cara menentukan ukuran fin namun cara ini hanya berlaku untuk
clipped delta dengan jumlah fin tiga buah.
Gambar 2.9 Dimensi clipped delta (Sumber: Joyce, 2006)
d. Parasut
Parasut digunakan untuk memperlambat gerakan roket sehingga pada saat mencapai tanah, kecepatan roket berkurang sehingga tidak merusak komponen-komponennya. Pada roket, gaya hambat pada parasut (FD) harus sama besar dengan berat roket (FG).
Untuk menentukan diameter parasut, kita dapat menggunakan persamaan berikut: 𝐷 = √(3.14 𝑥 𝜌 𝑥 𝐶(8 𝑥 𝑚 𝑥 𝑔) 𝐷𝑥 𝑉2) (2.15) Dimana: D = Diameter parasut m = Berat roket
p = Massa jenis udara (1.22 kg/m3)
g = Gaya gravitasi (9.8 m/s2) CD = Koefisien hambatan
V = Kecepatan roket
2.7.2 Muatan (Payload System)
Muatan dari suatu roket tergantung dengan misi dari roket tersebut. Pada awal mulanya, muatan roket berisi kembang api untuk perayaan. Selama perang dunia kedua, kembang api digantikan dengan ribuan kilo bahan peledak, rocket V-2 dari Jerman adalah roket pertama yang membawa muatan bahan peledak. Selain kembang api dan bahan peledak, muatan roket diganti dengan satelit yang memiliki beragam macam misi seperti untuk komunikasi, memantau cuaca, kepentingan mata-mata dan eksplorasi planet-planet. Muatan yang paling penting adalah manusia, peran roket disini telah berubah dari sebuah senjata menjadi alat transportasi (Nasa, 2014).
Muatan roket dapat berupa: 1. Satelit
2. Space Probe 3. Planetary Rover
Gambar 2.10 Satelit (Sumber: Nasa, 2014)
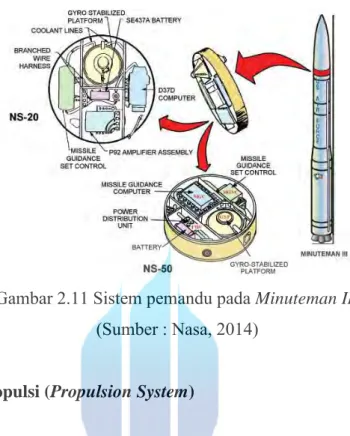
2.7.3 Sistem Pemandu (Guidance System)
Sistem pemandu adalah sebuah alat atau kumpulan dari beberapa alat yang digunakan dalam proses pengarahan dari kapal, pesawat terbang, misil, roket, satelit dan objek bergerak lainnya. Sistem pemandu ini adalah proses dari perhitungan dari perubahan posisi, kecepatan, ketinggian dan atau rotasi dari objek bergerak berdasarkan arah lintasan dan ketinggian yang sudah ditentukan. Dalam sistem pemandu ini biasanya terdiri dari alat pemandu, alat navigasi dan kontrol sistem. Contohnya seperti kompas,
GPS-receivers, Loran-C, star trackers, inertial measurement units, altimeters. Dalam
sistem pemandu, kita juga dapat mengetahui temperatur, kecepatan angin, kelembaban udara, massa dan kecepatan.
Dalam sistem pemandu terdapat tiga sub-sections: inputs, processing dan
outputs. Pada bagian inputs terdapat sensor, radio, course data, satellite links dan
sumber informasi lainnya. Pada bagian processing terdiri dari satu CPU atau lebih untuk mengintegrasikan data-data dan menentukan tindakan apa yang akan dilakukan, jika diperlukan dapat menyimpan data-data tersebut. Data-data tersebut diteruskan ke
bagian outputs yang akan mengontrol kecepatan dengan berinteraksi dengan alat seperti turbin, pompa bahan bakar, rudder dan aileron (Nasa, 2014).
Gambar 2.11 Sistem pemandu pada Minuteman III (Sumber : Nasa, 2014)
2.7.4 Sistem Propulsi (Propulsion System)
Propelan padat adalah gabungan antara bahan bakar dan oksidator. Gaya dorong pada roket didapat dari pembakaran propelan, bahan bakar padat biasanya terdiri dari bahan pembakar, bahan bakar, penyelaras laju pembakaran, katalisator dan inhibitor. Untuk memperbaiki sifat mekaniknya terkadang ditambahkan unsur binder, plasticizer atau lainnya. Dibawah ini ditampilkan beberapa jenis propelan padat beserta sifat-sifatnya (Bintoro, 2013, p. 9-10).
Table 2.3 Jenis propelan dan sifatnya
Propelan Kandungan Logam Berat (%) Densitas (lb/in3) Temper atur Bakar (oF) Isp (s) Laju bakar (in/s) Pangkat Tekanan (n) DB 0 0,058 4100 220-230 0,45 0,30 DB/AP/AI 20-21 0,965 6500 260-265 0,78 0,40
DB/AP-HMX/AI 20 0,065 6700 265-270 0,55 0,49 XLDB/AP 19 0,067 6060 269 0,35 0,50 HMX/AI 0 0,061 4600 230-240 0,45 0,38 PVC/AP 21 0,064 5600 260-265 0,45 0,35 PVC/AP/AI 0 0,062 4700 230-240 0,35 0,43 PS/AP 3 0,062 5000 240-250 0,31 0,33 PS/AP/AI 16-20 0,064 5000-6000 260-265 0,27 0,15 PU/AP/AI 19 0,067 6060 269 0,60 0,50 NEPE 16 0,064 5800 260-263 0,55 0,33 PBAN/AP/AI 15-17 0,64 5600-5800 260-265 0,45 0,40 CTPB/AP/AI 4-17 0,067 5600-5800 260-265 0,40 0,40 HTPB/AP/AI 14 0,064 5400-6000 260-263 0,32 0,35 Keterangan Tabel 2.3: Al : Aluminum AP : Ammonium Perchlorate CTPB : Carboxyl-Terminated Polybutadiene DB : Double Base HMX : Cyclotetramethylene Tetranitramine HTPB : Hydroxyl-terminated Polybutadiene
NEPE : Nitrate-ester Plasticizer
PBAN : Polybutadiene-acrylic Acid Polymer
PS : Polysulfide
PU : Polyurethane
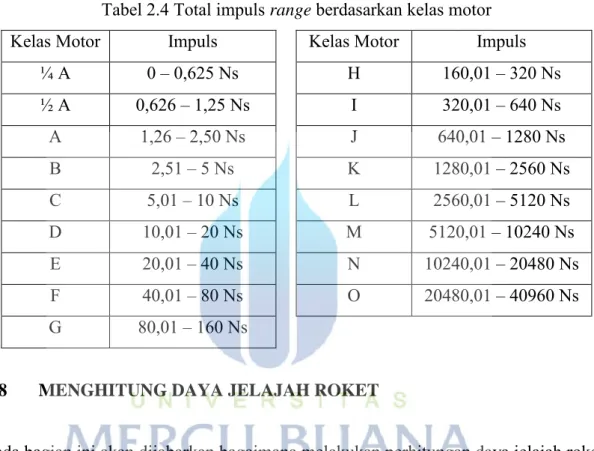
Motor roket bakar yang digunakan dalam permodelan roket dibagi berdasarkan total impuls dari motor roket tersebut. Kategori motor roket ini menjadi dasar bagi produsen motor roket dengan ¼ A untuk kategori terkecil dan O untuk kategori tertinggi, untuk penjelasan lebih detail dapat dilihat pada tabel dibawah ini (Niskanen, 2013).
Tabel 2.4 Total impuls range berdasarkan kelas motor Kelas Motor Impuls Kelas Motor Impuls
¼ A 0 – 0,625 Ns H 160,01 – 320 Ns ½ A 0,626 – 1,25 Ns I 320,01 – 640 Ns A 1,26 – 2,50 Ns J 640,01 – 1280 Ns B 2,51 – 5 Ns K 1280,01 – 2560 Ns C 5,01 – 10 Ns L 2560,01 – 5120 Ns D 10,01 – 20 Ns M 5120,01 – 10240 Ns E 20,01 – 40 Ns N 10240,01 – 20480 Ns F 40,01 – 80 Ns O 20480,01 – 40960 Ns G 80,01 – 160 Ns
2.8 MENGHITUNG DAYA JELAJAH ROKET
Pada bagian ini akan dijabarkan bagaimana melakukan perhitungan daya jelajah roket, termasuk menghitung ketinggian maksimal dan waktu delay motor. Detail penjelasan dapat dilihat melalui persamaan matematika berikut:
𝑘 = 12𝜌𝐶𝐷𝐴 (2.16)
𝑞 = √𝑇−𝑚𝑔𝑘 (2.17)
𝑥 =2𝑘𝑞𝑚 (2.19) 𝑥 = 2 √(𝑇−𝑚𝑔)𝑘𝑚 𝑣 = 𝑞 1 − 𝑒1 + 𝑒−𝑥𝑡−𝑥𝑡 (2.20) 𝑦1 =−𝑚2𝑘 ln (𝑇−𝑚𝑔−𝑘𝑣𝑇−𝑚𝑔 2) (2.21) 𝑦𝑐 = 2𝑘𝑚ln (𝑚𝑔+ 𝑘𝑣𝑚𝑔 2) (2.22) 𝑡𝑎 =tan−1(𝑣 𝑞⁄ )𝑎 𝑞𝑏 (2.23) 𝑞𝑎 = √𝑚𝑔𝑘 (2.24) 𝑞𝑏 = √𝑔𝑘𝑚 (2.25) Dimana:
m = massa roket dalam kg
g = percepatan gravitasi 9.81 m/s2
A = luas permukaan roket dalam m2
Cd = koefisien drag (umumnya 0.75 untuk rata-rata roket)
r = massa jenis udara 1.22 kg/m3 t = waktu bakar motor dalam detik T = gaya dorong motor dalam Newton l = impuls motor dalam Ns
v = kecepatan bakar motor dalam m/s
2.9 PERANGKAT LUNAK OPENROCKET
Simulasi uji terbang roket akan menggunakan software OpenRocket. Software yang dibuat oleh Sampo Niskanen seorang peneliti dari Helsinki University of Technology ini berbasis Java. Software ini juga merupakan thesis dari Sampo Niskanen
Struktur roket terbagi atas beberapa komponen seperti hidung roket, badan roket, komponen dalam badan roket dan sirip roket. Dengan software ini kita dapat memodifikasi data simulasi dengan mengganti nilai pada kondisi peluncuran seperti kecepatan rata-rata angin, standar devisiasi, intensitas turbulensi, arah angin dan sudut peluncuran. Kita juga dapat mengubah temperatur dan tekanan udara pada saat peluncuran serta posisi peluncuran (koordinat lintang dan bujur) dan ketinggian daerah dimana peluncuran tersebut diadakan.
Selain itu hasil yang ditampilkan berupa grafik sehingga memudahkan dalam pembacaan. Data yang dihasilkan dalam simulasi ini adalah sebagai berikut:
a. Vertical motion vs time b. Total motion vs time c. Flight side profile d. Ground track e. Stability vs time
f. Drag coefficient vs Mach number g. Roll characteristics
h. Angle of attack and orientation vs time
Pada gambar 2.11 dapat kita lihat penjelasan dari Sampo Niskanen yang dibuat untuk mempermudah dalam melakukan perancangan roket, tidak hanya itu dokumentasi elektronik juga diterbitkan untuk membantu para perancang roket memahami cara kerja dari perangkat lunak OpenRocket tersebut.
Gambar 2.12 Komponen roket dan penjelasannya