PENJADWALAN PENJAGA GERBANG TOL DENGAN GOAL
PROGRAMMING: STUDI KASUS RUAS TOL
PELABUHAN JAKARTA
PUTRI PUTU PRATAMI
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT PERTANIAN BOGOR
BOGOR 2015
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Penjadwalan Penjaga Gerbang Tol dengan Goal Programming: Studi Kasus Ruas Tol Pelabuhan Jakarta adalah benar karya saya dengan arahan dari dosen pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, Mei 2015 Putri Putu Pratami NIM G54100096
ABSTRAK
PUTRI PUTU PRATAMI. Penjadwalan Penjaga Gerbang Tol dengan Goal Programming: Studi Kasus Ruas Tol Pelabuhan Jakarta. Dibimbing oleh FARIDA HANUM dan TONI BAKHTIAR.
Gerbang tol ialah awal dari pelayanan tol yaitu tempat di mana pengguna jalan atau pengemudi kendaraan bermotor berhenti dan membayar tol. Dalam karya ilmiah ini aturan dan Standard Operational Procedure pengelola jalan tol digunakan untuk mendeskripsikan masalah penjadwalan penjaga gerbang Tol Pelabuhan Jakarta dan diformulasikan dalam bentuk goal programming serta diselesaikan dengan metode nonpreemptive goal programming. Terdapat dua kendala pada metode goal programming¸ yaitu kendala utama dan tambahan dengan fungsi objektif meminimumkan kekurangan hari bekerja dan meminimumkan terjadinya pola libur-masuk-libur pada penjaga gerbang tol. Software yang digunakan dalam menyelesaikan penjadwalan penjaga gerbang tol ini adalah LINGO 11.0. Dengan menggunakan nonpreemptive goal programming, diperoleh penjadwalan penjaga gerbang tol yang hampir memenuhi semua regulasi perusahaan.
Kata kunci: nonpreemptive goal pogramming, penjadwalan, penjaga gerbang tol
ABSTRACT
PUTRI PUTU PRATAMI. Tollroad Gate Keeper Scheduling with Goal Programming: Case Study in Pelabuhan Tollroad Jakarta. Supervised by FARIDA HANUM and TONI BAKHTIAR.
Toll gate is the starting point of toll services at which travelers must stop and pay the toll. In this work, rules and standard operational procedures of management company are considered to describe gate keepers scheduling problem at Pelabuhan Tollroad, Jakarta, which then formulated in term of goal programming and solved by using nonpreemptive method. There are two types of constraint in goal programming method, namely hard and soft constraints. The objective function in this paper is to minimize the shortage of work days and minimize the number of off-on-off patterns facing by tollgate keepers. Software used in solving toll gate keeper scheduling is LINGO 11.0. By using nonpreemptive goal programming, it’s obtained the tollroad gate keeper scheduling which fulfills almost all scheduling regulations obliged by the company.
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Sains
pada
Departemen Matematika
PENJADWALAN PENJAGA GERBANG TOL DENGAN GOAL
PROGRAMMING: STUDI KASUS RUAS TOL
PELABUHAN JAKARTA
PUTRI PUTU PRATAMI
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT PERTANIAN BOGOR
BOGOR 2015
Judul Skripsi : Penjadwalan Penjaga Gerbang Tol dengan Goal Programming: Studi Kasus Ruas Tol Pelabuhan Jakarta
Nama : Putri Putu Pratami NIM : G54100096
Disetujui oleh
Dra Farida Hanum, MSi Pembimbing I Dr Toni Bakhtiar, MSc Pembimbing II Diketahui oleh Dr Toni Bakhtiar, MSc Ketua Departemen Tanggal Lulus:
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah SWT atas segala rahmat dan hidayah-Nya sehingga penulis dapat menyelesaikan karya ilmiah yang berjudul Penjadwalan Penjaga Gerbang Tol dengan Goal Programming: Studi Kasus Ruas Tol Pelabuhan Jakarta.
Penyusunan karya ilmiah ini juga tidak terlepas dari bantuan berbagai pihak, untuk itu penulis mengucapkan terimakasih kepada:
1 keluarga tercinta: Ayahanda Karsidi dan Ibunda Heryanti, kedua adikku Putri Karina Syafitri dan Arief Nurdiyantono yang selalu memberi semangat, doa, dan motivasi untuk terus belajar,
2 Ibu Dra Farida Hanum, MSi dan Bapak Dr Toni Bakhtiar, M.Sc selaku dosen pembimbing, terima kasih atas segala masukan, saran, arahan, kesabaran selama membimbing penulis, dan kepada Bapak Dr Ir Bib Paruhum Silalahi, MKom selaku dosen penguji, terima kasih atas ilmu dan sarannya
3 Bapak Pudjo selaku Kepala Divisi Operasional PT Citra Marga Nusaphala Persada Tbk, yang telah banyak membantu penulis dalam pemberian data, 4 staf Departemen Matematika: Bapak Yono, Ibu Susi, Ibu Ade, Bapak Deni atas
kesabaran dan bantuannya selama ini,
5 teman-teman Lingkar Inspirasi, Liqo Ceria, Chlorophyl, Liga Inggris, Mentoring Ceria, Harmoni 47, BEM FMIPA Kabinet FMIPA Bersatu, BEM FMIPA Kabinet Sahabat Sinergi, Wisma Balsem, Jari’10, Wisma Pelangi, 6 teman-teman satu bimbingan: Mira, Ale, Vivi, dan Fikri,
7 teman-teman Matematika 47: Ando, Anis, Betry, Dadan, Irfan, Kamil, Kikio, Komti, Murzani, Nurul, Pupu, Shovi, Sri, Vivi, Zia, dan teman-teman lainnya yang telah memberikan semangat dan doa,
8 kakak-kakak Matematika angkatan 45 dan 46 dan adik-adik Matematika angkatan 48 yang telah memberikan motivasi dan dukungan,
9 semua pihak yang telah membantu dalam penulisan karya ilmiah ini, Semoga karya ilmiah ini bermanfaat.
Bogor, Mei 2015 Putri Putu Pratami
DAFTAR ISI
DAFTAR TABEL x DAFTAR GAMBAR x DAFTAR LAMPIRAN x PENDAHULUAN 1 Latar Belakang 1 Tujuan Penelitian 3 LANDASAN TEORI 3Jalan dan Jalan Tol 3
Goal Programming 4
Nonpreemptive Goal Programming 5
DESKRIPSI DAN FORMULASI MASALAH 6
Deskripsi Masalah 6
Formulasi Masalah 8
IMPLEMENTASI MODEL 13
Fungsi Objektif 16
HASIL DAN PEMBAHASAN 16
SIMPULAN DAN SARAN 20
Simpulan 21
Saran 22
DAFTAR PUSTAKA 22
LAMPIRAN 24
DAFTAR TABEL
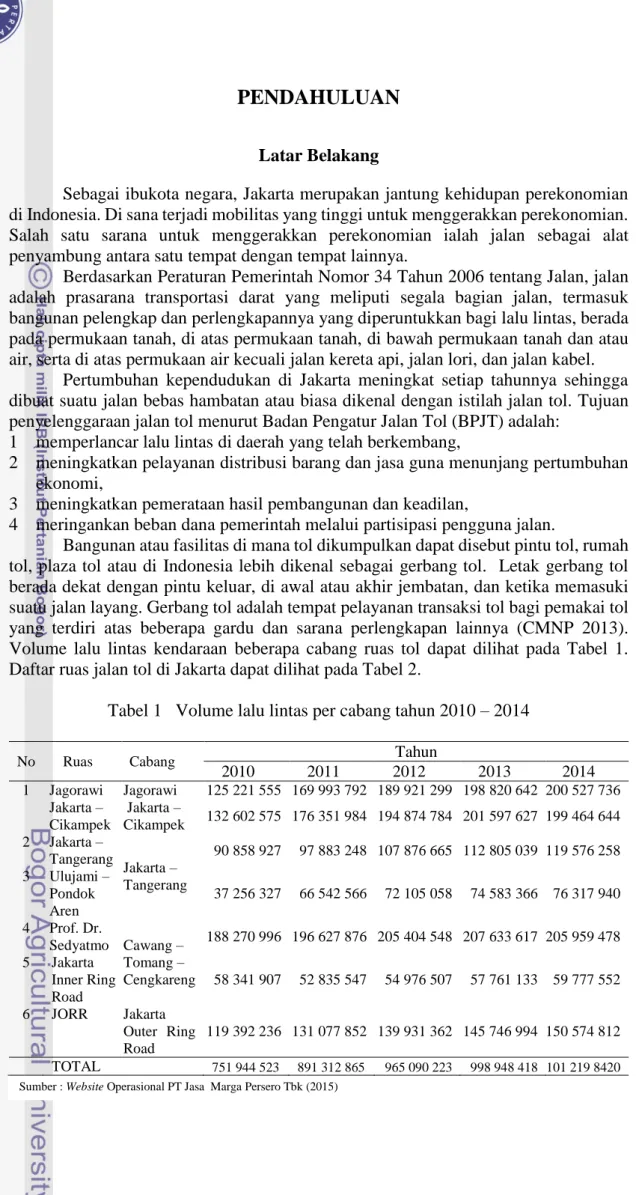
1 Volume Lalu lintas per cabang tahun 2010 – 2014
Wiyono tahun 2008 – 2013 1
2 Daftar ruas jalan tol di Jakarta 2 3 Volume lalu lintas kendaraan Ruas Tol Pelabuhan dan Tol Wiyoto 3
4 Daftar gerbang tol 14
5 Indeks, parameter, dan himpunan 15 6 Daftar shift menjaga dan libur setiap penjaga gerbang tol dengan
metode nonpreemptive goal programming 17 7 Banyaknya shift menjaga dan libur (dalam hari) untuk setiap penjaga
gerbang tol dengan metode nonpreemptive goal programming 19 8 Persentase keterpenuhan kendala penjadwalan penjaga gerbang tol
dengan menggunakan metode goal programming 21 9 Daftar rincian kendala tambahan yang tidak terpenuhi 21
DAFTAR GAMBAR
1 Ruas Jalan Tol Dalam Kota Jakarta 6 2 Solver status dari sintaks model LINGO 11.0 pada penjadwalan
penjaga gerbang tol 28
DAFTAR LAMPIRAN
1 Sintaks LINGO 11.0 untuk menyelesaikan masalah goal
programming 24
2 Sintaks LINGO 11.0 untuk menyelesaikan masalah nonpreemptive
goal programming 24
3 Sintaks LINGO 11.0 untuk menyelesaikan masalah penjadwalan penjaga gerbang tol dengan metode nonpreemptive goal programming 25 4 Daftar penjadwalan dengan metode nonpreemptive setiap gerbang
setiap hari pada shift pagi 29 5 Daftar penjadwalan dengan metode nonpreemptive setiap gerbang
setiap hari pada shift siang 30 6 Daftar penjadwalan dengan metode nonpreemptive setiap gerbang
Sumber : Website Operasional PT Jasa Marga Persero Tbk (2015)
PENDAHULUAN
Latar Belakang
Sebagai ibukota negara, Jakarta merupakan jantung kehidupan perekonomian di Indonesia. Di sana terjadi mobilitas yang tinggi untuk menggerakkan perekonomian. Salah satu sarana untuk menggerakkan perekonomian ialah jalan sebagai alat penyambung antara satu tempat dengan tempat lainnya.
Berdasarkan Peraturan Pemerintah Nomor 34 Tahun 2006 tentang Jalan, jalan adalah prasarana transportasi darat yang meliputi segala bagian jalan, termasuk bangunan pelengkap dan perlengkapannya yang diperuntukkan bagi lalu lintas, berada pada permukaan tanah, di atas permukaan tanah, di bawah permukaan tanah dan atau air, serta di atas permukaan air kecuali jalan kereta api, jalan lori, dan jalan kabel.
Pertumbuhan kependudukan di Jakarta meningkat setiap tahunnya sehingga dibuat suatu jalan bebas hambatan atau biasa dikenal dengan istilah jalan tol. Tujuan penyelenggaraan jalan tol menurut Badan Pengatur Jalan Tol (BPJT) adalah:
1 memperlancar lalu lintas di daerah yang telah berkembang,
2 meningkatkan pelayanan distribusi barang dan jasa guna menunjang pertumbuhan ekonomi,
3 meningkatkan pemerataan hasil pembangunan dan keadilan,
4 meringankan beban dana pemerintah melalui partisipasi pengguna jalan.
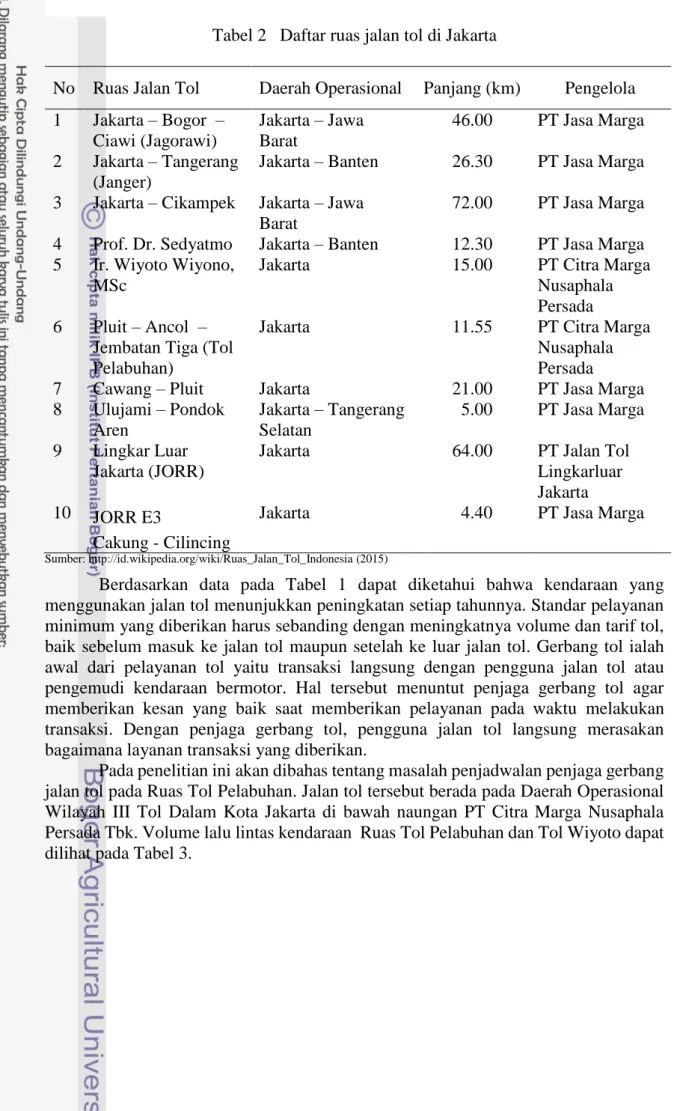
Bangunan atau fasilitas di mana tol dikumpulkan dapat disebut pintu tol, rumah tol, plaza tol atau di Indonesia lebih dikenal sebagai gerbang tol. Letak gerbang tol berada dekat dengan pintu keluar, di awal atau akhir jembatan, dan ketika memasuki suatu jalan layang. Gerbang tol adalah tempat pelayanan transaksi tol bagi pemakai tol yang terdiri atas beberapa gardu dan sarana perlengkapan lainnya (CMNP 2013). Volume lalu lintas kendaraan beberapa cabang ruas tol dapat dilihat pada Tabel 1. Daftar ruas jalan tol di Jakarta dapat dilihat pada Tabel 2.
Tabel 1 Volume lalu lintas per cabang tahun 2010 – 2014
No Ruas Cabang Tahun
2010 2011 2012 2013 2014 1 Jagorawi Jagorawi 125 221 555 169 993 792 189 921 299 198 820 642 200 527 736 Jakarta – Cikampek Jakarta – Cikampek 132 602 575 176 351 984 194 874 784 201 597 627 199 464 644 2 Jakarta – Tangerang Jakarta – Tangerang 90 858 927 97 883 248 107 876 665 112 805 039 119 576 258 3 Ulujami – Pondok Aren 37 256 327 66 542 566 72 105 058 74 583 366 76 317 940 4 Prof. Dr. Sedyatmo Cawang – Tomang – Cengkareng 188 270 996 196 627 876 205 404 548 207 633 617 205 959 478 5 Jakarta Inner Ring Road 58 341 907 52 835 547 54 976 507 57 761 133 59 777 552 6 JORR Jakarta Outer Ring Road 119 392 236 131 077 852 139 931 362 145 746 994 150 574 812 TOTAL 751 944 523 891 312 865 965 090 223 998 948 418 101 219 8420
2
Tabel 2 Daftar ruas jalan tol di Jakarta
No Ruas Jalan Tol Daerah Operasional Panjang (km) Pengelola 1 Jakarta – Bogor – Ciawi (Jagorawi) Jakarta – Jawa Barat 46.00 PT Jasa Marga 2 Jakarta – Tangerang (Janger)
Jakarta – Banten 26.30 PT Jasa Marga 3 Jakarta – Cikampek Jakarta – Jawa
Barat
72.00 PT Jasa Marga 4 Prof. Dr. Sedyatmo Jakarta – Banten 12.30 PT Jasa Marga 5 Ir. Wiyoto Wiyono,
MSc
Jakarta 15.00 PT Citra Marga
Nusaphala Persada 6 Pluit – Ancol –
Jembatan Tiga (Tol Pelabuhan)
Jakarta 11.55 PT Citra Marga
Nusaphala Persada 7 Cawang – Pluit Jakarta 21.00 PT Jasa Marga 8 Ulujami – Pondok Aren Jakarta – Tangerang Selatan 5.00 PT Jasa Marga 9 Lingkar Luar Jakarta (JORR)
Jakarta 64.00 PT Jalan Tol
Lingkarluar Jakarta 10 JORR E3
Cakung - Cilincing
Jakarta 4.40 PT Jasa Marga
Sumber: http://id.wikipedia.org/wiki/Ruas_Jalan_Tol_Indonesia (2015)
Berdasarkan data pada Tabel 1 dapat diketahui bahwa kendaraan yang menggunakan jalan tol menunjukkan peningkatan setiap tahunnya. Standar pelayanan minimum yang diberikan harus sebanding dengan meningkatnya volume dan tarif tol, baik sebelum masuk ke jalan tol maupun setelah ke luar jalan tol. Gerbang tol ialah awal dari pelayanan tol yaitu transaksi langsung dengan pengguna jalan tol atau pengemudi kendaraan bermotor. Hal tersebut menuntut penjaga gerbang tol agar memberikan kesan yang baik saat memberikan pelayanan pada waktu melakukan transaksi. Dengan penjaga gerbang tol, pengguna jalan tol langsung merasakan bagaimana layanan transaksi yang diberikan.
Pada penelitian ini akan dibahas tentang masalah penjadwalan penjaga gerbang jalan tol pada Ruas Tol Pelabuhan. Jalan tol tersebut berada pada Daerah Operasional Wilayah III Tol Dalam Kota Jakarta di bawah naungan PT Citra Marga Nusaphala Persada Tbk. Volume lalu lintas kendaraan Ruas Tol Pelabuhan dan Tol Wiyoto dapat dilihat pada Tabel 3.
3
Tujuan Penelitian Tujuan dari penelitian ini ialah:
1 memodelkan masalah penjadwalan penjaga gerbang tol menggunakan nonpreemptive goal programming,
2 mengaplikasikan masalah penjadwalan penjaga gerbang tol pada Daerah Operasi Wilayah III yaitu Ruas Tol Pelabuhan yang berada pada naungan PT Citra Marga Nusaphala Persada Tbk.
LANDASAN TEORI
Jalan dan Jalan Tol
Menurut Peraturan Pemerintah Republik Indonesia Nomor 15 Tahun 2005 tentang jalan tol berisi ketentuan umum bahwa:
1 jalan umum adalah jalan yang diperuntukkan bagi lalu lintas umum,
2 jalan tol adalah jalan umum yang merupakan bagian sistem jaringan jalan dan sebagai jalan nasional yang penggunanya diwajibkan membayar tol,
3 tol adalah sejumlah uang tertentu yang dibayarkan untuk penggunaan jalan tol, 4 pengguna jalan tol adalah setiap orang yang menggunakan kendaraan bermotor
dengan membayar tol,
5 gerbang tol adalah tempat pelayanan transaksi tol bagi pemakai tol yang terdiri atas beberapa gardu dan sarana perlengkapan lainnya
6 jalan penghubung adalah jalan yang menghubungkan jalan tol dengan jalan umum yang ada,
7 Badan Pengatur Jalan Tol yang selanjutnya disebut BPJT adalah badan yang dibentuk oleh Menteri Perhubungan, ada di bawah, dan bertanggung jawab kepada Menteri.
Tabel 3 Volume lalu lintas kendaraan Ruas Tol Pelabuhan dan Tol Wiyoto Wiyono tahun 2008 – 2013
No Tahun Volume Lalu
Lintas Terpadu 1 2008 174 946 829 2 2009 180 850 752 3 2010 188 270 988 4 2011 196 639 945 5 2012 205 665 087 6 2013 207 635 053
4
Goal Programming
Goal Programming merupakan pengembangan dari Pemrograman Linear yang diperkenalkan oleh Charles dan Cooper pada tahun 1961. Goal programming digunakan untuk menyelesaikan pemrograman linear dengan fungsi objektif majemuk atau fungsi tujuan yang lebih dari satu. Dalam kasus seperti ini kadang tidak ada titik yang fisibel yang bisa mengoptimalkan semua tujuan. Tujuan dari goal programming adalah meminimumkan penyimpangan dalam mencapai tujuan suatu masalah. Oleh karena itu, setiap goal merupakan bagian dari fungsi tujuan. Goal programming bisa berbentuk linear, integer, dan taklinear.
Pendekatan dasar dari Goal Programming adalah untuk menetapkan suatu tujuan yang dinyatakan dengan angka tertentu untuk setiap tujuan, merumuskan suatu fungsi tujuan untuk setiap tujuan, dan kemudian mencari penyelesaian yang meminimumkan jumlah (tertimbang) penyimpangan-penyimpangan dari fungsi-fungsi tujuan terhadap tujuan masing-masing (Hillier dan Lieberman 1990).
Komponen goal programming menurut Sarker dan Newton (2008) ialah: 1 variabel keputusan,
2 variabel tujuan (deviasi), 3 kendala sistem,
4 kendala tujuan (goal constraints), 5 fungsi objektif.
Variabel deviasi pada goal programming memiliki fungsi menampung penyimpangan atau deviasi yang akan terjadi pada nilai ruas kiri suatu kendala terhadap nilai ruas kanannya. Terdapat dua macam variabel deviasi, yaitu variabel 𝑑1− yang berfungsi menampung deviasi yang berada di bawah sasaran dan variabel 𝑑1+ yang berfungsi menampung deviasi yang berada di atas sasaran.
Tiga kemungkinan penyelesaian menggunakan metode goal programming (Siswanto 1993), yaitu:
1 sasaran terlampaui, apabila 𝑑𝑖+ > 0 dan 𝑑𝑖− = 0, Hasil yang diperoleh di atas sasaran,
2 sasaran tepat terpenuhi yaitu goal = 0, terjadi jika 𝑑𝑖+ = 𝑑𝑖−= 0,
3 sasaran tidak tercapai, terjadi jika 𝑑𝑖− >0 dan 𝑑1+ = 0. Hasil diperoleh di bawah sasaran.
Berikut diberikan ilustrasi contoh pemrograman linear dari goal programming. Misalkan diberikan model pemrograman linear.
minimumkan 𝑧 = 𝑥 + 𝑦 terhadap kendala : 200x ≥ 1000 100x + 400y ≥ 1200 250y ≥ 800 1500x + 3000y ≤ 15000 x, y ≥ 0
Dengan menggunakan software LINGO 11.0, model pemrograman linear di atas tidak fisibel. Dalam setiap tujuan, diinginkan agar tidak terjadi penyimpangan yang terlalu besar dari targetnya. Agar model tersebut fisibel, kendala pada model tersebut dibentuk menjadi kendala utama dan kendala tambahan. Untuk itu perlu ditambahkan variabel baru yang dinamakan variabel deviasi agar pemrograman linear tersebut dapat
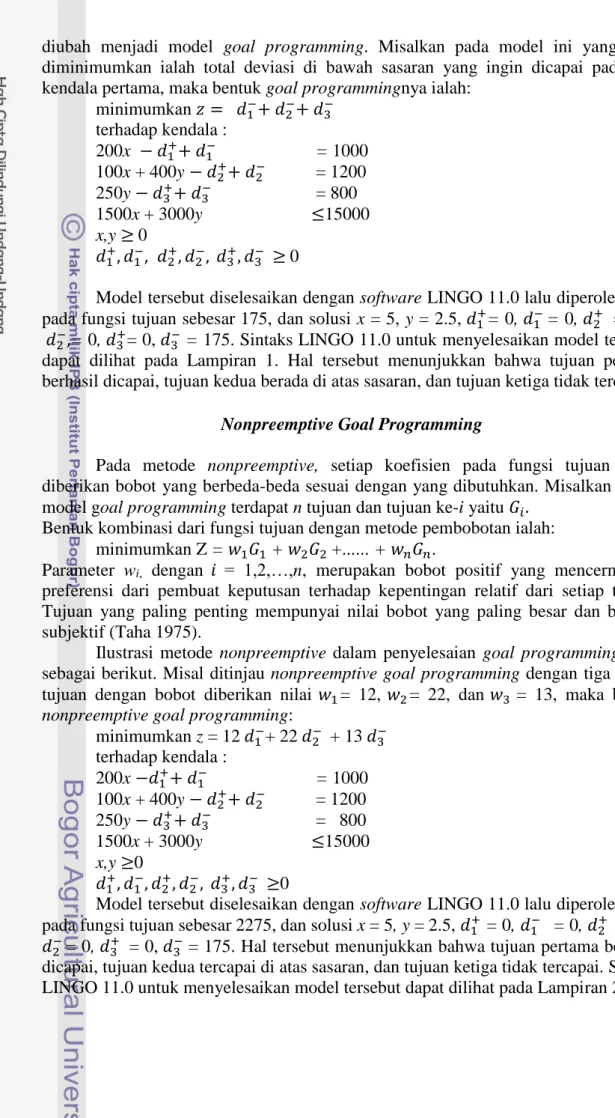
5 diubah menjadi model goal programming. Misalkan pada model ini yang akan diminimumkan ialah total deviasi di bawah sasaran yang ingin dicapai pada tiga kendala pertama, maka bentuk goal programmingnya ialah:
minimumkan 𝑧 = 𝑑1−+ 𝑑 2 −+ 𝑑 3− terhadap kendala : 200x − 𝑑1++ 𝑑1− = 1000 100x + 400y − 𝑑2++ 𝑑2− = 1200 250y − 𝑑3++ 𝑑3− = 800 1500x + 3000y ≤15000 x,y ≥ 0 𝑑1+, 𝑑1−, 𝑑2+, 𝑑2−, 𝑑3+, 𝑑3− ≥ 0
Model tersebut diselesaikan dengan software LINGO 11.0 lalu diperoleh nilai pada fungsi tujuan sebesar 175, dan solusi x = 5, y = 2.5, 𝑑1+= 0, 𝑑1− = 0, 𝑑2+ = 300, 𝑑2−,= 0, 𝑑3+= 0, 𝑑3− = 175. Sintaks LINGO 11.0 untuk menyelesaikan model tersebut dapat dilihat pada Lampiran 1. Hal tersebut menunjukkan bahwa tujuan pertama berhasil dicapai, tujuan kedua berada di atas sasaran, dan tujuan ketiga tidak tercapai.
Nonpreemptive Goal Programming
Pada metode nonpreemptive, setiap koefisien pada fungsi tujuan dapat diberikan bobot yang berbeda-beda sesuai dengan yang dibutuhkan. Misalkan dalam model goal programming terdapat n tujuan dan tujuan ke-i yaitu 𝐺𝑖.
Bentuk kombinasi dari fungsi tujuan dengan metode pembobotan ialah: minimumkan Z = 𝑤1𝐺1 + 𝑤2𝐺2 +... + 𝑤𝑛𝐺𝑛.
Parameter wi, dengan 𝑖 = 1,2,…,n, merupakan bobot positif yang mencerminkan preferensi dari pembuat keputusan terhadap kepentingan relatif dari setiap tujuan. Tujuan yang paling penting mempunyai nilai bobot yang paling besar dan bersifat subjektif (Taha 1975).
Ilustrasi metode nonpreemptive dalam penyelesaian goal programming ialah sebagai berikut. Misal ditinjau nonpreemptive goal programming dengan tiga fungsi tujuan dengan bobot diberikan nilai 𝑤1= 12, 𝑤2= 22, dan 𝑤3 = 13, maka bentuk
nonpreemptive goal programming: minimumkan z = 12 𝑑1−+ 22 𝑑 2 − + 13 𝑑 3 − terhadap kendala : 200x −𝑑1++ 𝑑1− = 1000 100x + 400y − 𝑑2++ 𝑑2− = 1200 250y − 𝑑3++ 𝑑 3 − = 800 1500x + 3000y ≤15000 x,y ≥0 𝑑1+, 𝑑1−, 𝑑2+, 𝑑2−, 𝑑3+, 𝑑3− ≥0
Model tersebut diselesaikan dengan software LINGO 11.0 lalu diperoleh nilai pada fungsi tujuan sebesar 2275, dan solusi x = 5, y = 2.5, 𝑑1+ = 0, 𝑑1− = 0, 𝑑2+ = 300, 𝑑2− = 0, 𝑑3+ = 0, 𝑑3− = 175. Hal tersebut menunjukkan bahwa tujuan pertama berhasil dicapai, tujuan kedua tercapai di atas sasaran, dan tujuan ketiga tidak tercapai. Sintaks LINGO 11.0 untuk menyelesaikan model tersebut dapat dilihat pada Lampiran 2.
6
DESKRIPSI DAN FORMULASI MASALAH
Deskripsi Masalah
Jalan Tol Dalam Kota Jakarta (Jakarta Intra Urban Tollroad/ JIUT) adalah jalan tol yang dioperasikan oleh PT Citra Marga Nusaphala Persada (CMNP) Tbk dan PT Jasa Marga. Ruas Tol Dalam Kota Jakarta di bawah naungan PT Jasa Marga ialah Ruas Tol Cawang – Pluit dengan rincian gerbang tol sebanyak 19 gerbang dan Tol Prof. Soedyatmo dengan rincian jumlah gerbang tol sebanyak 4 gerbang. Ruas Tol Dalam Kota Jakarta di bawah naungan PT CMNP Tbk ialah Ruas Tol Wiyoto Wiyono dengan rincian gerbang tol sebanyak 9 gerbang dan Tol Pelabuhan dengan rincian gerbang tol sebanyak 7 gerbang. Gambar Ruas Jalan Tol Dalam Kota Jakarta dapat dilihat pada Gambar 1.
Dalam penelitian ini, ruas tol yang digunakan dalam penjadwalan penjaga gerbang tol ialah Ruas Tol Pelabuhan yang berada pada naungan PT CMNP, Tbk. Aturan-aturan dan Standard Operational Procedure (SOP) yang tercantum dalam Peraturan Disiplin Tugas Pengumpul Tol berdasarkan SK Direksi PT Citra Marga Nusaphala Persada tentang Peraturan Disiplin Tugas Pengumpul Tol Nomor 833 Pasal 2 diperlukan untuk mendeskripsikan masalah penjadwalan penjaga gerbang Tol Dalam Kota Jakarta. Salah satu contoh peraturannya ialah shift yang diberlakukan. Pada umumnya penjadwalan pekerja sebanyak tiga shift yaitu shift pagi, shift siang, dan shift malam. Namun, beberapa perusahaan menerapkan dua shift karena faktor sumber daya manusia dan tingkat kesulitan kerja. Penjadwalan yang menerapkan tiga shift biasanya berdurasi delapan jam sedangkan penjadwalan yang menerapkan dua shift berdurasi 12 jam. Selain shift kerja pada penjadwalan penjaga gerbang tol, hal yang harus diketahui
7 ialah banyaknya penjaga gerbang tol yang tersedia dan banyaknya penjaga gerbang yang dibutuhkan dalam penjadwalan setiap shift. Penjaga gerbang tol wanita hanya dijadwalkan pada shift pagi karena perusahaan mengedepankan faktor kemanusiaan dan keamanan pada shift tersebut.
Pekerjaan terlaksana secara efektif, efisien, dan sistematis agar tujuan tercapai adalah hal yang diinginkan oleh manajemen perusahaan. Berdasarkan Pedoman Tugas Pengumpul Tol pada SK Direksi PT Citra Marga Nusaphala Persada, Tbk tentang Peraturan Disiplin Tugas Pengumpul Tol Nomor 831 Tahun 2013, PT Citra Marga Nusaphala Persada Tbk sebagai penyelenggara jalan tol dalam kota ruas Cawang – Tanjung Priok – Pluit bertanggung jawab dalam memenuhi pelayanan jasa dalam tol. Salah satu pedoman tugas ialah melaksanakan pelayanan pengumpulan tol dalam hal transaksi di gerbang tol.
Beberapa peraturan berdasarkan SK Direksi PT Citra Marga Nusaphala Persada, Tbk tentang Peraturan Disiplin Tugas Pengumpul Tol Nomor 833 Tahun 2013 pada Pasal 2, yaitu:
a gardu atau gerbang tol ialah ruang tempat bekerja pengumpul tol untuk melaksanakan pelayanan dan transaksi tol kepada pemakai jalan tol,
b shift tugas adalah pembagian waktu tugas dalam 24 jam, yang terdiri atas tiga shift, c waktu kerja shift ialah waktu kerja bergilir yang ditetapkan sebagai berikut :
Shift pagi pukul 05.30 s.d. 13.30, Shift siang pukul 12.30 s.d. 20.30, Shift malam pukul 19.30 s.d. 06.30.
Data pada penjadwalan penjaga gerbang tol diperoleh dari peraturan tetap dan data sekunder PT CMNP, Tbk. Ketentuan-ketentuan untuk masalah penjadwalan petugas gerbang tol, yaitu:
1 penjaga gerbang pada shift pagi hanya boleh diisi oleh penjaga wanita dan penjaga gerbang pada shift siang dan malam hanya boleh diisi oleh penjaga pria. Ketentuan ini bertujuan untuk mengedepankan faktor keamanan khususnya untuk penjaga wanita ketika menjaga pada shift malam,
2 sistem kerja penjaga gerbang tol yaitu sistem beberapa hari kerja dan beberapa hari libur namun disesuaikan setiap shiftnya,
3 terjadi perbedaan jumlah penjaga gerbang tol yang dibutuhkan setiap shiftnya. Hal ini disesuaikan dengan volume kendaraan pada shift tersebut sehingga mempengaruhi jumlah gerbang yang dibuka setiap shift,
4 petugas pengganti cuti tidak dimasukkan dalam penjadwalan. Petugas tersebut hanya digunakan ketika penjaga gerbang tol tidak bisa bertugas di suatu hari, 5 penjaga gerbang tol yang hari ini mendapat shift pagi tidak bertugas pada shift
siang atau shift malam, begitu pula sebaliknya,
6 penjaga gerbang yang menjaga suatu gerbang di hari ini keesokan harinya mendapatkan gerbang yang lain, artinya pada hari berikutnya tidak boleh berada pada gerbang yang sama
Saat ini, pembuatan jadwal penjaga gerbang tol dilakukan secara manual oleh Divisi OperasionalPT. CMNP, Tbk menggunakan bantuan aplikasi Microsoft Excel. Penjadwalan yang dibuat secara manual tersebut mungkin memenuhi kebutuhan yang ada pada penjadwalan namun belum tentu mampu memenuhi kebutuhan dan keinginan
8
baik dari perusahaan maupun dari pihak penjaga gerbang tol. Kendala utama ialah kendala yang harus dipenuhi sedangkan kendala tambahan merupakan kendala yang sebaiknya dipenuhi.
Pembentukan peraturan disiplin tugas pengumpul tol ini dilakukan untuk memaksimalkan pelayanan yang diberikan dan menghasilkan jadwal yang optimal tanpa melupakan faktor kemanusiaan. Dengan menggunakan metode goal programming, penjadwalan penjaga gerbang tol diharapkan dapat memenuhi aturan-aturan yang ada dan mempertimbangkan batasan lain yang mungkin diperlukan.
Formulasi Masalah
Berdasarkan deskripsi masalah, maka dapat dibuat model penjadwalan penjaga gerbang tol dengan menggunakan metode goal programming. Berikut ini diberikan indeks, parameter, himpunan, variabel keputusan, variabel deviasi, dan fungsi objektif dalam model umum masalah penjadwalan penjaga gerbang tol dapat diformulasikan sebagai berikut :
Indeks
𝑖 = indeks penjaga gerbang tol, i = 1,2,...,𝑚 𝑘 = indeks hari, k=1,2,..., 𝑛
𝑏 = indeks gerbang tol, b = 1,2,..., 𝑎
Parameter
𝑛 = banyaknya hari pada satu periode penjadwalan, 𝑚 = banyaknya penjaga gerbang tol yang tersedia,
𝑎 = banyaknya gerbang tol yang tersedia,
𝑒 = maksimum banyaknya hari bekerja pada shift pagi dalam satu periode penjadwalan,
𝑓 = maksimum banyaknya hari bekerja pada shift siang dalam satu periode penjadwalan,
𝑔 = maksimum banyaknya hari bekerja pada shift malam dalam satu periode penjadwalan,
ℎ = minimum banyaknya hari bekerja pada shift pagi dalam satu periode penjadwalan,
𝑗 = minimum banyaknya hari bekerja pada shift siang dalam satu periode penjadwalan,
𝑙 = minimum banyaknya hari bekerja pada shift malam dalam satu periode penjadwalan,
𝑟 = maksimum banyaknya hari bagi setiap penjaga untuk menjaga satu gerbang tertentu dalam satu periode penjadwalan,
SPk = banyaknya penjaga gerbang tol yang dibutuhkan pada shift pagi pada hari k, k = 1,2,..,n
SSk = banyaknya penjaga gerbang tol yang dibutuhkan pada shift siang pada hari k, k = 1,2,...,n
SMk = penjaga gerbang tol yang dibutuhkan pada shift malam pada hari k, k = 1,2,...,n
9 JM = jumlah hari maksimal penjaga gerbang tol bekerja secara
berturut-turut. Himpunan
B1 = himpunan gerbang tol yang dibuka pada shift pagi,
B2 = himpunan gerbang tol yang dibuka pada shift siang,
B3 = himpunan gerbang tol yang dibuka pada shift malam,
𝐼1 = himpunan penjaga gerbang wanita, 𝐼2 = himpunan penjaga gerbang pria,
𝐼 = himpunan penjaga gerbang tol, 𝐼 = 𝐼1 ∪ 𝐼2 Variabel Keputusan
𝑋𝑆𝑃𝑖,𝑏,𝑘 = {1 ; jika penjaga 𝑖 menjaga gerbang 𝑏 pada 𝑠ℎ𝑖𝑓𝑡 pagi di hari 𝑘 0 ; selainnya 𝑋𝑆𝑆𝑖,𝑏,𝑘 = {1 ; jika penjaga 𝑖 menjaga gerbang 𝑏 pada 𝑠ℎ𝑖𝑓𝑡 siang di hari 𝑘 0 ; selainnya 𝑋𝑆𝑀𝑖,𝑏,𝑘 = {1 ; jika penjaga 𝑖 menjaga gerbang 𝑏 pada 𝑠ℎ𝑖𝑓𝑡 malam di hari 𝑘
0 ; selainnya 𝑋𝐽𝐿𝑖,𝑘 = {
1 ; jika penjaga 𝑖 libur pada hari 𝑘 0 ; selainnya dengan : 𝑖= 1,2,…,𝑚, 𝑏= 1,2,…,𝑎, 𝑘= 1,2,…,𝑛
Variabel Deviasi
𝑑𝑝𝑖 + = nilai yang berada di atas sasaran untuk goal ke-p untuk penjaga i, 𝑑𝑝𝑖− = nilai yang berada di bawah sasaran untuk goal ke-p untuk penjaga i, 𝑑𝑝𝑖𝑘+ = nilai yang berada di atas sasaran untuk goal ke-p untuk penjaga i
pada hari k,
𝑑𝑝𝑖𝑘− = nilai yang berada di bawah sasaran untuk goal ke-p untuk penjaga i pada hari k,
Fungsi Objektif
Penjadwalan penjaga gerbang tol memiliki fungsi objektif untuk meminimumkan kelebihan dan/atau kekurangan (deviasi) secara total. Proses meminimumkan deviasi tersebut berlaku untuk sasaran yang ingin dicapai. Fungsi objektif pada masalah penjadwalan penjaga gerbang tol pada penelitian ini ialah:
min 𝑧 = ∑ 𝑤𝑝 𝑑𝑝
𝒚
𝒑=𝟏
,
dengan wp merupakan bobot pada tujuan ke-p, p = 1,2,....,y dan 𝑑𝑝 bisa berbentuk 𝑑𝑝𝑖+, 𝑑𝑝𝑖−, 𝑑𝑝𝑖𝑘+ , atau 𝑑𝑝𝑖𝑘− .
10
Formulasi Kendala Kendala Utama
1 Kebutuhan penjaga gerbang setiap shiftnya terpenuhi setiap hari.
∑ ∑ 𝑋𝑆𝑃𝑖,𝑏,𝑘 ≥ 𝑏 ∈ 𝐵1 𝑖 ∈ 𝐼1 𝑆𝑃𝑘 𝑘 = 1,2,…,n ∑ ∑ 𝑋𝑆𝑆𝑖,𝑏,𝑘 ≥ 𝑏 ∈ 𝐵2 𝑖 ∈ 𝐼2 𝑆𝑆𝑘 𝑘= 1,2,…,n ∑ ∑ 𝑋𝑆𝑀𝑖,𝑏,𝑘 ≥ 𝑏 ∈ 𝐵3 𝑖 ∈ 𝐼2 𝑆𝑀𝑘 𝑘= 1,2,…,n
2 Penjaga gerbang pria tidak boleh bertugas pada shift pagi.
∑ ∑ 𝑋𝑆𝑃𝑖,𝑏,𝑘 =
𝑏 ∈ 𝐵1
𝑖 ∈ 𝐼2
0 𝑘= 1,2,…,n
3 Penjaga gerbang wanita tidak boleh bertugas pada shift siang. ∑ ∑ 𝑋𝑆𝑆𝑖,𝑏,𝑘 =
𝑏 ∈ 𝐵2
𝑖 ∈ 𝐼1
0, 𝑘= 1,2,…,n
4 Penjaga gerbang wanita tidak boleh menjaga pada shift malam.
∑ ∑ 𝑋𝑆𝑀𝑖,𝑏,𝑘 =
𝑏 ∈ 𝐵3
𝑖 ∈ 𝐼1
0 𝑘= 1,2,…,n
5 Gerbang yang ditutup pada shift tertentu di hari k tidak perlu dijaga.
𝑋𝑆𝑃𝑖,𝑏,𝑘 = 0, b B1, 𝑘= 1,2,…,n, 𝑖= 1,2,…,𝑚
𝑋𝑆𝑆𝑖,𝑏,𝑘 = 0, b B2, 𝑘= 1,2,…,n,𝑖= 1,2,…,𝑚
𝑋𝑆𝑀𝑖,𝑏,𝑘 = 0, b B3 𝑘= 1,2,…,n, 𝑖= 1,2,…,𝑚
6 Penjaga gerbang tol tidak boleh menjaga gerbang lebih dari JM hari beturut-turut. 𝑋𝐽𝐿𝑖,𝑘+ 𝑋𝐽𝐿𝑖,𝑘+1+ 𝑋𝐽𝐿𝑖,𝑘+2+ ⋯ + 𝑋𝐽𝐿𝑖,𝑘+𝐽𝑀 ≥ 1 , i, k = 1,2,...,n –JM
7 Setiap penjaga gerbang tol hanya bisa mendapatkan satu shift setiap harinya, yaitu shift tugas atau libur.
𝑋𝐽𝐿𝑖,𝑘 + ∑ 𝑋𝑆𝑃𝑖,𝑏,𝑘 𝒂 𝒃=𝟏 + ∑ 𝑋𝑆𝑆𝑖,𝑏,𝑘 𝒂 𝒃=𝟏 + ∑ 𝑋𝑆𝑀𝑖,𝑏,𝑘 𝒂 𝒃=𝟏 = 1, 𝑘= 1,2,…,n, 𝑖= 1,2,…,𝑚
8 Setiap penjaga gerbang maksimum mendapatkan satu gerbang setiap harinya.
∑ 𝑋𝑆𝑃𝑖,𝑏,𝑘 ≤ 1,
𝑏 ∈ 𝐵1
11 ∑ 𝑋𝑆𝑆𝑖,𝑏,𝑘 ≤ 1, 𝑏 ∈ 𝐵2 𝑘= 1,2,…,n, 𝑖 ∈ I2 ∑ 𝑋𝑆𝑀𝑖,𝑏,𝑘 ≤ 1, 𝑏 ∈ 𝐵3 𝑘= 1,2,…,n, 𝑖 ∈ I2
9 Setiap gerbang tol maksimum dijaga oleh satu penjaga gerbang setiap harinya. ∑ 𝑋𝑆𝑃𝑖,𝑏,𝑘 ≤ 1, 𝑖 ∈𝐼1 𝑘= 1,2,…,n, 𝑏 ∈ 𝐵1 ∑ 𝑋𝑆𝑆𝑖,𝑏,𝑘 ≤ 1, 𝑖 ∈𝐼2 𝑘= 1,2,…,n, 𝑏 ∈ 𝐵2 ∑ 𝑋𝑆𝑀𝑖,𝑏,𝑘 ≤ 1, 𝑖 ∈𝐼2 𝑘= 1,2,…,n, 𝑏 ∈ 𝐵3
10 Penjaga gerbang tol tidak boleh bekerja melebihi batas yang sudah ditetapkan selama satu periode penjadwalan.
∑ ∑ 𝑋𝑆𝑃𝑖,𝑏,𝑘 𝑏 ∈ 𝐵1 𝑛 𝑘=1 ≤ 𝑒 i ∈ I1 ∑ ∑ 𝑋𝑆𝑆𝑖,𝑏,𝑘 𝑏 ∈ 𝐵2 𝑛 𝑘=1 ≤ 𝑓 i ∈ I2 ∑ ∑ 𝑋𝑆𝑀𝑖,𝑏,𝑘 𝑏 ∈ 𝐵3 𝑛 𝑘=1 ≤ 𝑔 i ∈ I2
11 Setiap penjaga mendapat maksimum 𝑟 hari menjaga satu gerbang tertentu dalam satu periode penjadwalan.
∑ 𝑋𝑆𝑃𝑖,𝑏,𝑘 ≤ 𝑟 𝒏 𝒌=𝟏 i ∈ I1, b ∈ 𝐵1 ∑ 𝑋𝑆𝑆𝑖,𝑏,𝑘 ≤ 𝑟 𝒏 𝒌=𝟏 i ∈ I2, b ∈ 𝐵2 ∑ 𝑋𝑆𝑀𝑖,𝑏,𝑘 ≤ 𝑟 𝒏 𝒌=𝟏 i ∈ I2, b ∈ 𝐵3
12 Kendala variabel keputusan
XSPi,b, k ∈ {0,1} ; 𝑖= 1,2,…,𝑚, 𝑏= 1,2,…,𝑎, 𝑘= 1,2,…,𝑛 XSSi,b, k ∈ {0,1} ; 𝑖= 1,2,…,𝑚, 𝑏= 1,2,…,𝑎, 𝑘= 1,2,…,𝑛 XSMi,b, k ∈ {0,1} ; 𝑖= 1,2,…,𝑚, 𝑏= 1,2,…,𝑎, 𝑘= 1,2,…,𝑛 XJLi,k ∈ {0,1} ; 𝑖= 1,2,…,𝑚, 𝑘= 1,2,…,𝑛
12
Kendala tambahan
1 Penjaga gerbang tol diharapkan tidak bekerja kurang dari batas yang sudah ditetapkan selama satu periode penjadwalan.
∑ ∑ 𝑋𝑆𝑃𝑖,𝑏,𝑘 ≥ ℎ 𝒏 𝒌=𝟏 𝒂 𝒃=𝟏 , i ∈ I1, ∑ ∑ 𝑋𝑆𝑆𝑖,𝑏,𝑘 ≥ 𝒏 𝒌=𝟏 𝒂 𝒃=𝟏 𝑗, i ∈ I2, ∑ ∑ 𝑋𝑆𝑀𝑖,𝑏,𝑘 ≥ 𝒏 𝒌=𝟏 𝒂 𝒃=𝟏 𝑙, i ∈ I2.
2 Penjaga gerbang diharapkan tidak memiliki pola libur-masuk-libur.
𝑋𝐽𝐿𝑖,𝑘+ ∑ 𝑋𝑆𝑃𝑖,𝑏,𝑘+1 𝑎 𝑏=1 + 𝑋𝐽𝐿𝑖,𝑘+2 ≤ 2, 𝑖 ∈ 𝐼1 ,𝑘 = 1,2, … , 𝑛, 𝑋𝐽𝐿𝑖,𝑘+ ∑ 𝑋𝑆𝑆𝑖,𝑏,𝑘+1 𝑎 𝑏=1 + ∑ 𝑋𝑆𝑀𝑖,𝑏,𝑘+1 𝑎 𝑏=1 + 𝑋𝐽𝐿𝑖,𝑘+2 ≤ 2, 𝑖 ∈𝐼2 , 𝑘= 1,2,…,𝑛. Kendala tambahan pada penjadwalan penjaga gerbang tol tidak harus terpenuhi, sehingga kendala tersebut akan diberi variabel deviasi yang dapat diminimumkan kekurangan/kelebihannya. Kendala tambahan setelah diberikan variabel deviasi menjadi:
1 Penjaga gerbang tol diharapkan tidak bekerja kurang dari batas yang sudah ditetapkan selama satu periode penjadwalan.
∑ ∑ 𝑋𝑆𝑃𝑖,𝑏,𝑘 −𝑑1+𝑖+ 𝑑1−𝑖 = ℎ 𝒏 𝒌=𝟏 , 𝒂 𝒃=𝟏 i ∈ I1 ∑ ∑ 𝑋𝑆𝑆𝑖,𝑏,𝑘 −𝑑2+𝑖 + 𝑑2−𝑖 𝒏 𝒌=𝟏 𝒂 𝒃=𝟏 = 𝑗, i ∈ I2, ∑ ∑ 𝑋𝑆𝑀𝑖,𝑏,𝑘 −𝑑3+𝑖+ 𝑑3−𝑖 = 𝒏 𝒌=𝟏 𝒂 𝒃=𝟏 𝑙. i ∈ I2.
2 Penjaga gerbang diharapkan tidak memiliki pola libur-masuk-libur.
𝑋𝐽𝐿𝑖,𝑘+ ∑ 𝑋𝑆𝑃𝑖,𝑏,𝑘+1
𝑎
𝑏=1
+ 𝑋𝐽𝐿𝑖,𝑘+2 −𝑑4+𝑖,𝑘+ 𝑑4−𝑖,𝑘 = 2,
13
𝑋𝐽𝐿𝑖,𝑘+ ∑𝑎𝑏=1𝑋𝑆𝑆𝑖,𝑏,𝑘+1+ ∑𝑎𝑏=1𝑋𝑆𝑀𝑖,𝑏,𝑘+1+ 𝑋𝐽𝐿𝑖,𝑘+2 −𝑑5+𝑖,𝑘 + 𝑑5−𝑖,𝑘 = 2,
𝑖 ∈ 𝐼2 𝑘= 1,2,…,𝑛.
Karena kendala tambahan pertama semula berbentuk pertaksamaan ≥ , maka variabel deviasi yang diminimumkan ialah 𝑑1−𝑖, 𝑑2−𝑖, dan 𝑑3−𝑖, sedangkan untuk kendala tambahan dengan pertaksamaan ≤, maka variabel deviasi yang diminimumkan ialah 𝑑4𝑖,𝑘+ dan𝑑5𝑖,𝑘+ .
IMPLEMENTASI MODEL
Model matematika untuk masalah penjadwalan penjaga gerbang tol tersebut diimplementasikan pada masalah penjadwalan penjaga gerbang tol dengan data berasal dari PT. CMNP, Tbk. Gerbang tol pada Jalan Tol Dalam Kota Jakarta di bawah naungan PT CMNP berjumlah 19 gerbang utama, yaitu Kebon Nanas, Pedati, Jatinegara, Rawamangun, Pulomas, Cempaka Putih, Sunter, Podomoro, Tanjung Priok 1, Tanjung Priok 2, Kemayoran, Ancol Timur, Ancol Barat, Gedong Panjang 1, Gedong Panjang 2, Jembatan Tiga 1, Jembatan Tiga 2, Pluit 2, dan Kapuk dengan jumlah total dari semua gardu tol yang ada ialah sebanyak 39 gardu tol.
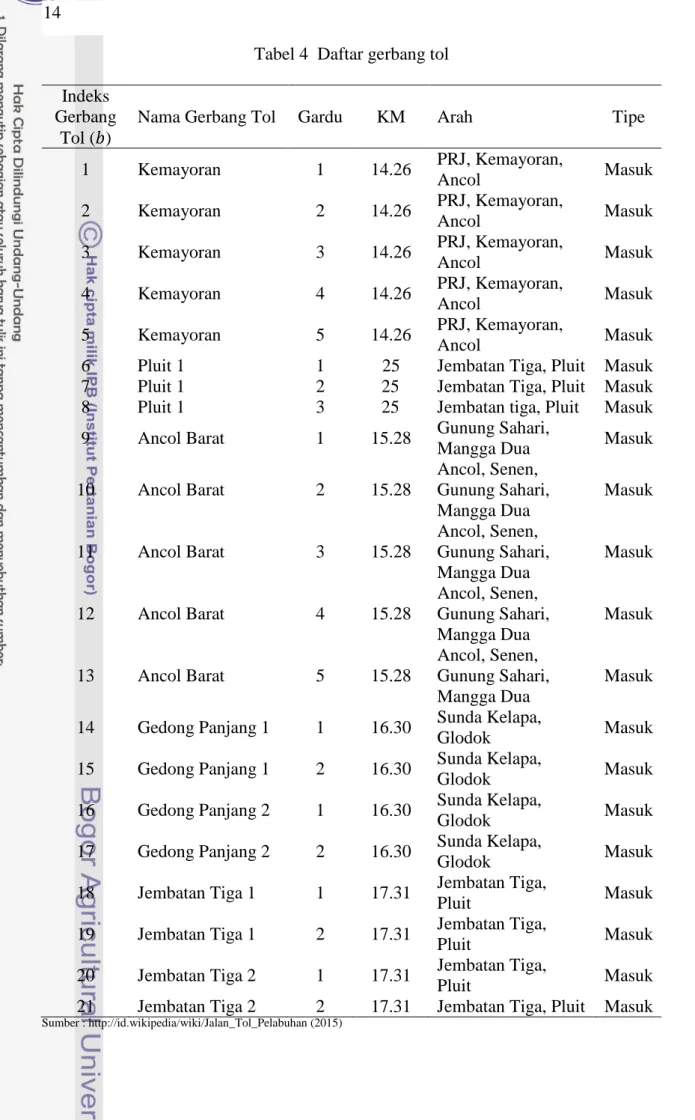
Tidak semua ruas tol digunakan dalam penelitian ini. Daerah yang digunakan pada penelitian ialah Daerah Operasi Wilayah III yaitu Ruas Tol Pelabuhan yang berada dalam naungan PT Citra Marga Nursaphala Persada Tbk dengan rincian tercantum pada Tabel 4. Gerbang tol yang digunakan ialah Pluit 1, Jembatan Tiga 1, Jembatan Tiga 2, Ancol Barat, Gedong Panjang 1, Gedong Panjang 2, dan Kemayoran dengan jumlah gardu tol sebanyak 21 gardu tol. Penjaga gerbang yang dibutuhkan untuk satu periode penjadwalan ialah sebanyak 78 penjaga gerbang tol dengan rincian 26 penjaga wanita bertugas pada shift pagi dan 52 penjaga pria bertugas pada shift siang dan malam. Pada penelitian ini, banyaknya hari dalam satu periode penjadwalan ialah sebanyak 31 hari. Keterangan indeks, parameter, dan himpunan pada studi kasus ini dapat dilihat di Tabel 5. Sintaks LINGO 11.0 untuk menyelesaikan model dengan metode nonpreemptive pada simulasi ini dapat dilihat pada Lampiran 3.
14
Tabel 4 Daftar gerbang tol Indeks
Gerbang Tol (𝑏)
Nama Gerbang Tol Gardu KM Arah Tipe
1 Kemayoran 1 14.26 PRJ, Kemayoran, Ancol Masuk 2 Kemayoran 2 14.26 PRJ, Kemayoran, Ancol Masuk 3 Kemayoran 3 14.26 PRJ, Kemayoran, Ancol Masuk 4 Kemayoran 4 14.26 PRJ, Kemayoran, Ancol Masuk 5 Kemayoran 5 14.26 PRJ, Kemayoran, Ancol Masuk
6 Pluit 1 1 25 Jembatan Tiga, Pluit Masuk
7 Pluit 1 2 25 Jembatan Tiga, Pluit Masuk
8 Pluit 1 3 25 Jembatan tiga, Pluit Masuk
9 Ancol Barat 1 15.28 Gunung Sahari,
Mangga Dua Masuk
10 Ancol Barat 2 15.28 Ancol, Senen, Gunung Sahari, Mangga Dua Masuk 11 Ancol Barat 3 15.28 Ancol, Senen, Gunung Sahari, Mangga Dua Masuk 12 Ancol Barat 4 15.28 Ancol, Senen, Gunung Sahari, Mangga Dua Masuk 13 Ancol Barat 5 15.28 Ancol, Senen, Gunung Sahari, Mangga Dua Masuk 14 Gedong Panjang 1 1 16.30 Sunda Kelapa,
Glodok Masuk
15 Gedong Panjang 1 2 16.30 Sunda Kelapa,
Glodok Masuk
16 Gedong Panjang 2 1 16.30 Sunda Kelapa,
Glodok Masuk
17 Gedong Panjang 2 2 16.30 Sunda Kelapa,
Glodok Masuk
18 Jembatan Tiga 1 1 17.31 Jembatan Tiga,
Pluit Masuk
19 Jembatan Tiga 1 2 17.31 Jembatan Tiga,
Pluit Masuk
20 Jembatan Tiga 2 1 17.31 Jembatan Tiga,
Pluit Masuk
21 Jembatan Tiga 2 2 17.31 Jembatan Tiga, Pluit Masuk
15 Tabel 5 Indeks, parameter, dan himpunan
Indeks Keterangan Nilai
𝑖 Indeks penjaga gerbang tol 1,2,3,…,78
𝑏 Indeks gerbang tol 1,2,3,…,21
𝑘 Indeks hari 1,2,3,…,31
Parameter
𝑛 Banyaknya hari pada satu periode penjadwalan
31 hari 𝑚 Banyaknya penjaga gerbang tol
yang tersedia
78 penjaga 𝑎 Banyaknya gerbang tol yang
tersedia
21 e Maksimum banyaknya hari
bekerja pada shift pagi dalam satu periode penjadwalan
22
f Maksimum banyaknya hari bekerja pada shift siang dalam satu periode penjadwalan
13
𝑔 Maksimum banyaknya hari bekerja pada shift malam dalam satu periode penjadwalan
13
ℎ Minimum banyaknya hari bekerja pada shift pagi dalam satu periode penjadwalan
21
𝑗 Minimum banyaknya hari bekerja pada shift siang dalam satu periode penjadwalan
11
𝑙 Minimum banyaknya hari bekerja pada shift malam dalam satu periode penjadwalan
9
𝑟 Maksimum banyaknya hari bagi setiap penjaga untuk menjaga satu gerbang tertentu dalam satu periode penjadwalan
2
SPk Banyaknya penjaga gerbang tol yang dibutuhkan pada shift pagi
18 SSk Banyaknya penjaga gerbang tol
yang dibutuhkan pada shift siang
20 SMk Banyaknya penjaga gerbang tol
yang dibutuhkan pada shift malam
14
JM Jumlah hari maksimal penjaga gerbang tol bekerja secara berturut-turut
16
Tabel 5 Indeks, parameter, dan himpunan (lanjutan)
Himpunan Keterangan Nilai
𝐵1 Himpunan gerbang tol yang dibuka pada
shift pagi {
1,2,3,4,5,8,9,10,11,12, 13,14,15,16,17, 18, 19,
20
} 𝐵2 Himpunan gerbang tol yang dibuka pada
shift siang {
1,2,3,4,5,6,7,8,9,10, 11,12,13,14,15,16,17,
18,19,20
} 𝐵3 Himpunan gerbang tol yang dibuka pada
shift malam {
1,2,3,6,8,9,12,14,15,16, 17,19,20,21 } 𝐼1 Himpunan penjaga gerbang wanita {1,2,3, … ,26} 𝐼2 Himpunan penjaga gerbang pria {27,28,29, … ,78} 𝐼 Himpunan penjaga gerbang tol {1,2,3, … ,78}
Fungsi Objektif
Pada metode nonpreemptive, setiap koefisien pada fungsi tujuan dapat diberikan bobot yang berbeda-beda sesuai dengan yang dibutuhkan. Metode ini bertujuan meminimumkan kekurangan/kelebihan deviasi pada sasaran yang ingin dicapai pada kendala tambahan yaitu meminimumkan kekurangan hari bekerja pada penjaga gerbang tol dan meminimumkan kelebihan deviasi agar penjaga tidak memiliki pola libur-masuk-libur (LML). Fungsi objektif pada metode ini ialah sebagai berikut: Minimumkan z = 𝑤1∑ 𝑑1−𝑖 𝑚 𝑖=1 + 𝑤2∑ 𝑑2−𝑖 𝑚 𝑖=1 + 𝑤3∑ 𝑑3−𝑖 𝑚 𝑖=1 + 𝑤4 ∑ ∑ 𝑑4+𝑖,𝑘 𝑛 𝑘=1 𝑚 𝑖=1 + 𝑤5 ∑ ∑ 𝑑5+𝑖,𝑘 𝑛 𝑘=1 𝑚 𝑖=1 . Misalkan bobot pada masalah ini ialah 𝑤1= 4, 𝑤2= 3, 𝑤3= 3, 𝑤4 = 2, dan 𝑤5 = 2, maka fungsi objektif setelah diberikan bobot yaitu:
Minimumkan z = 4 ∑ 𝑑1−𝑖 78 𝑖=1 + 3 ∑ 𝑑2−𝑖 78 𝑖=1 + 3 ∑ 𝑑3−𝑖 78 𝑖=1 + 2 ∑ ∑ 𝑑4+𝑖,𝑘 31 𝑘=1 𝑖 ∈ 𝐼1 + 2 ∑ ∑ 𝑑5+𝑖,𝑘 31 𝑘=1 𝑖 ∈ 𝐼2 .
HASIL DAN PEMBAHASAN
Hasil penjadwalan penjaga gerbang tol dengan menggunakan metode nonpreemptive goal programming didapatkan hasil solusi global optimum. Data dan kendala tersebut diolah dengan bantuan software LINGO 11.0. Nilai fungsi objektif pada penjadwalan penjaga gerbang sebesar 102 dengan solusi yang optimal yaitu
𝑑1 𝑖− = 0, 𝑑2 𝑖− = 0, 𝑑3 𝑖− ≥ 0, 𝑑4 𝑖,𝑘+ = 0, dan 𝑑5 𝑖,𝑘+ = 0 dengan i = 1,2,3,…,78, b = 1,2,3,...,21, dan k = 1,2,3,4,…,31.
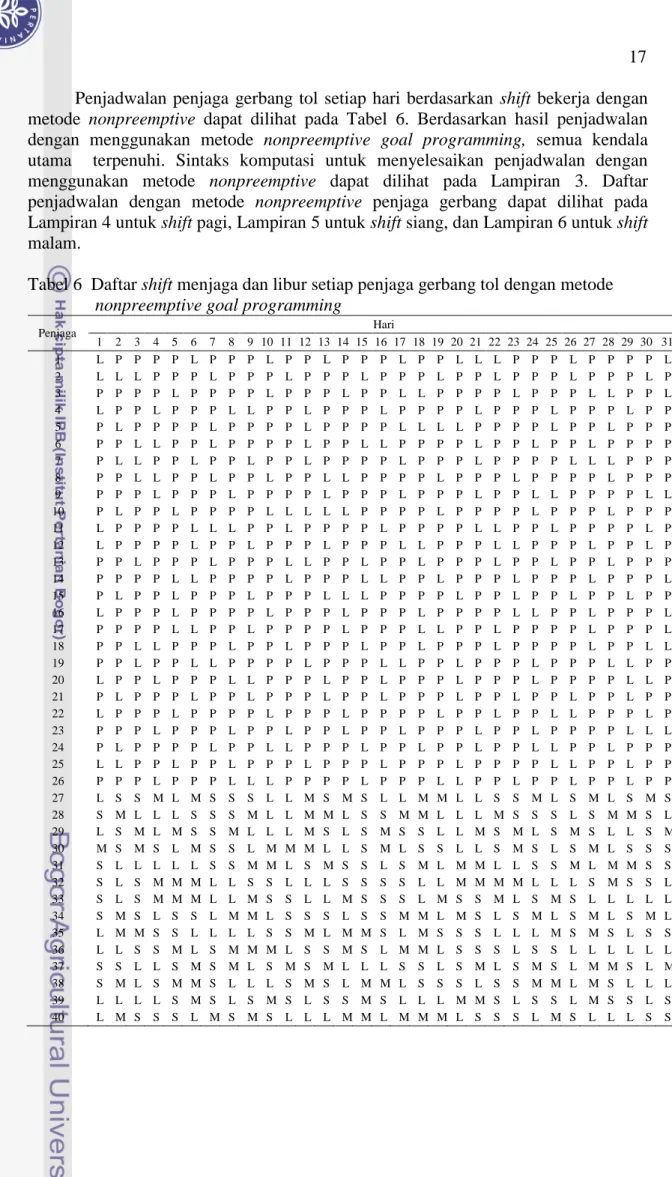
17 Penjadwalan penjaga gerbang tol setiap hari berdasarkan shift bekerja dengan metode nonpreemptive dapat dilihat pada Tabel 6. Berdasarkan hasil penjadwalan dengan menggunakan metode nonpreemptive goal programming, semua kendala utama terpenuhi. Sintaks komputasi untuk menyelesaikan penjadwalan dengan menggunakan metode nonpreemptive dapat dilihat pada Lampiran 3. Daftar penjadwalan dengan metode nonpreemptive penjaga gerbang dapat dilihat pada Lampiran 4 untuk shift pagi, Lampiran 5 untuk shift siang, dan Lampiran 6 untuk shift malam.
Tabel 6 Daftar shift menjaga dan libur setiap penjaga gerbang tol dengan metode nonpreemptive goal programming
Penjaga Hari 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 1 L P P P P L P P P L P P L P P P L P P L L L P P P L P P P P L 2 L L L P P P L P P P L P P P L P P P L P P L P P P L P P P L P 3 P P P P L P P P P L P P P L P P L L P P P P L P P P L L P P L 4 L P P L P P P L L P P L P P P L P P P P L P P P L P P P L P P 5 P L P P P P L P P P P L P P P P L L L L P P P P L P P L P P P 6 P P L L P P L P P P P L P P L L P P P P L P P L P P L P P P P 7 P L L P P L P P L P P L P P P P L P P P L P P P P L L L P P P 8 P P L L P P L P P L P P L L P P P P L P P P L P P P P L P P P 9 P P P L P P P L P P P P L P P P L P P P L P P L L P P P P L L 10 P L P P L P P P P L L L L L P P P P L P P P P L P P P L P P P 11 L P P P P L L L P P L P P P P L P P P P L L P P L P P P P L P 12 L P P P P L P P L P P P L P P P L L P P P L L P P P L P P L P 13 P P L P P P L P P P L L P P L P P L P P P L P P L P P L P P P 14 P P P P L L P P P P L P P P L L P P L P P P L P P P L P P P L 15 P L P P L P P P L P P P L L L P P P P L P P L P P L P P L P P 16 L P P P L P P P P L P P P L P P P L P P P P L L P P L P P P L 17 P P P P L L P P L P P P P L P P P L L P P L P P P P L P P P L 18 P P L L P P P L P P L P P P L P P L P P P L P P P P L P P L L 19 P P L P P L L P P P P L P P P L L P P L P P P L P P P L L P P 20 L P P L P P P L L P P P L P P L P P P L P P P L P P P P L L P 21 P L P P P L P P L P P P L P P L P P P L P P L P P L P P L P P 22 L P P P L P P P P L P P P L P P P P L P P L P P L L P P P L P 23 P P P L P P P L P P L P P L P P L P P P L P P L P P P P L L L 24 P L P P P P L P P L L P P P L P P L P P L P P L L P P L P P P 25 L L P P L P P L P P P L P P P L P P P L P P P P L L P P L P P 26 P P P L P P P L L L P P P P L P P P L L P P L P P L P P L P P 27 L S S M L M S S S L L M S M S L L M M L L S S M L S M L S M S 28 S M L L L S S S M L L M M L S S M M L L L M S S S L S M M S L 29 L S M L M S S M L L L M S L S M S S L L M S M L S M S L L S M 30 M S M S L M S S L M M M L L S M L S S L L S M S L S M L S S S 31 S L L L L L S S M M L S M S S L S M L M M L L S S M L M M S S 32 S L S M M M L L S S L L L S S S S L L M M M M L L L S M S S L 33 S L S M M M L L M S S L L M S S S L M S S M L S M S L L L L L 34 S M S L S S L M M L S S S L S S M M L M S L S M L S M L S M L 35 L M M S S L L L L S S M L M M S L M S S S L L L M S M S L S S 36 L L S S M L S M M M L S S M S L M M L S S S L S S L L L L L L 37 S S L L S M S M L S M S M L L L S S L S M L S M S L M M S L M 38 S M L S M M S L L L S M S L M M L S S S L S S M M L M S L L L 39 L L L L S M S L S M S L S S M S L L L M M S L S S L M S S L S 40 L M S S S L M S M S L L L M M L M M M L S S S L M S L L L S S
18
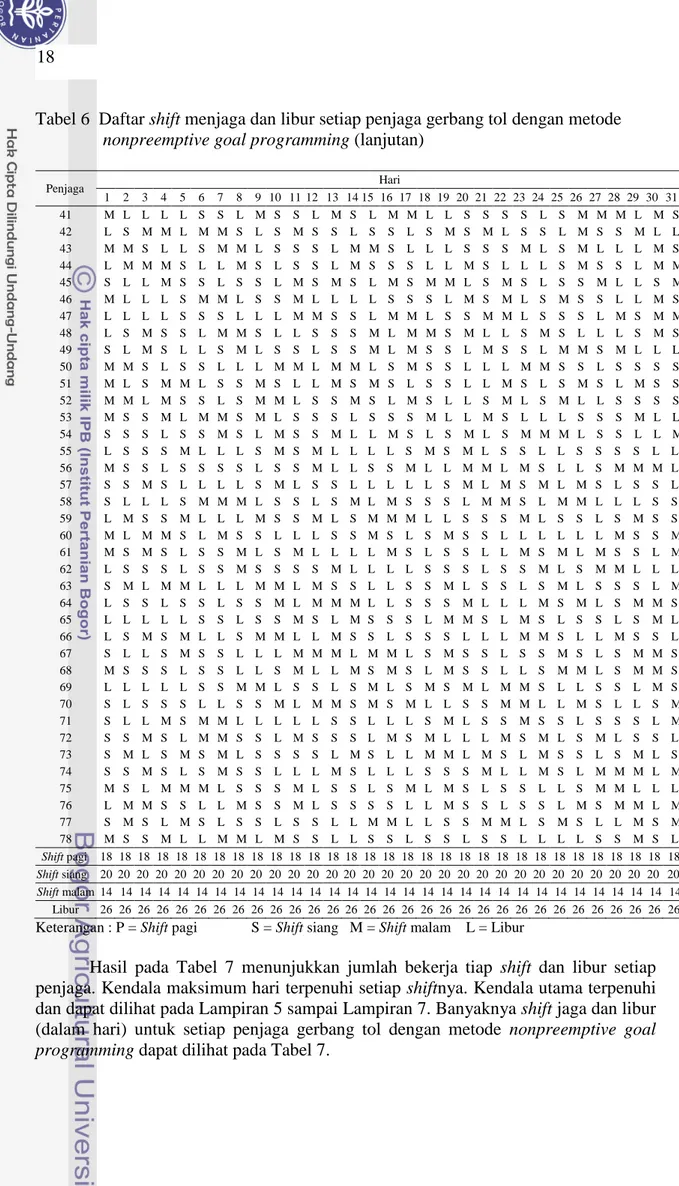
Tabel 6 Daftar shift menjaga dan libur setiap penjaga gerbang tol dengan metode nonpreemptive goal programming (lanjutan)
Penjaga Hari 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 41 M L L L L S S L M S S L M S L M M L L S S S S L S M M M L M S 42 L S M M L M M S L S M S S L S S L S M S M L S S L M S S M L L 43 M M S L L S M M L S S S L M M S L L L S S S M L S M L L L M S 44 L M M M S L L M S L S S L M S S S L L M S L L L S M S S L M M 45 S L L M S S L S S L M S M S L M S M M L S M S L S S M L L S M 46 M L L L S M M L S S M L L L L S S S L M S M L S M S S L L M S 47 L L L L S S S L L L M M S S L M M L S S M M L S S S L M S M M 48 L S M S S L M M S L L S S S M L M M S M L L S M S L L L S M S 49 S L M S L L S M L S S L S S M L M S S L M S S L M M S M L L L 50 M M S L S S L L L M M L M M L S M S S L L L M M S S L S S S S 51 M L S M M L S S M S L L M S M S L S S L L M S L S M S L M S S 52 M M L M S S L S M M L S S M S L M S L L S M L S M L L S S S S 53 M S S M L M M S M L S S S L S S S M L L M S L L L S S S M L L 54 S S S L S S M S L M S S M L L M S L S M L S M M M L S S L L M 55 L S S S M L L L S M S M L L L L S M S M L S S L L S S S S L L 56 M S S L S S S S L S S M L L S S M L L M M L M S L L S M M M L 57 S S M S L L L L S M L S S L L L L L S M L M S M L M S L S S L 58 S L L L S M M M L S S L S M L M S S S L M M S L M M L L L S S 59 L M S S M L L L M S S M L S M M M L L S S S M L S S L S M S S 60 M L M M S L M S S L L L S S M S L S M S S L L L L L L M S S M 61 M S M S L S S M L S M L L L L M S L S S L L M S M L M S S L M 62 L S S S L S S M S S S S M L L L L S S S L S S M L S M M L L L 63 S M L M M L L L M M L M S S L L S S M L S S L S M L S S S L M 64 L S S L S S L S S M L M M M L L S S S M L L L M S M L S M M S 65 L L L L L S S L S S M S L M S S S L M M S L M S L S S L S M L 66 L S M S M L L S M M L L M S S L S S S L L L M M S L L M S S L 67 S L L S M S S L L L M M M L M M L S M S S L S S M S L S M M S 68 M S S S L S S L L S M L L M S M S L M S S L L S M M L S M M S 69 L L L L L S S M M L S S L S M L S M S M L M M S L L S S L M S 70 S L S S S L L S S M L M M S M S M L L S S M M L L M S L L S M 71 S L L M S M M L L L L L S S L L L S M L S S M S S L S S S L M 72 S S M S L M M S S L M S S S L M S M L L L M S M L S M L S S L 73 S M L S M S M L S S S S L M S L L M M L M S L M S S L S M L S 74 S S M S L S M S S L L L M S L L L S S S M L L M S L M M M L M 75 M S L M M M L S S S M L S S L S M L M S L S S L L S M M L L L 76 L M M S S L L M S S M L S S S S L L M S S L S S L M S M M L M 77 S M S L M S L S S L S S L L M M L L S S M M L S M S L L M S M 78 M S S M L L M M L M S S L L S S L S S L S S L L L L S S M S L Shift pagi 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 Shift siang 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 Shift malam14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 Libur 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26
Keterangan : P = Shift pagi S = Shift siang M = Shift malam L = Libur
Hasil pada Tabel 7 menunjukkan jumlah bekerja tiap shift dan libur setiap penjaga. Kendala maksimum hari terpenuhi setiap shiftnya. Kendala utama terpenuhi dan dapat dilihat pada Lampiran 5 sampai Lampiran 7. Banyaknya shift jaga dan libur (dalam hari) untuk setiap penjaga gerbang tol dengan metode nonpreemptive goal programming dapat dilihat pada Tabel 7.
19 Tabel 7 Banyaknya shift jaga dan libur (dalam hari) untuk setiap penjaga gerbang tol
dengan metode nonpreemptive goal programming Penjaga Shift
pagi
Shift
siang
Shift
malam Kerja Libur LML MLM
1 21 0 0 21 10 0 5 2 21 0 0 21 10 0 7 3 22 0 0 22 9 0 4 4 22 0 0 22 9 0 6 5 22 0 0 22 9 0 4 6 22 0 0 22 9 0 5 7 21 0 0 21 10 0 5 8 22 0 0 22 9 0 5 9 22 0 0 22 9 0 5 10 21 0 0 21 10 0 5 11 21 0 0 21 10 0 4 12 21 0 0 21 10 0 5 13 22 0 0 22 9 0 7 14 22 0 0 22 9 0 4 15 21 0 0 21 10 0 7 16 22 0 0 22 9 0 5 17 22 0 0 22 9 0 4 18 21 0 0 21 10 0 4 19 21 0 0 21 10 0 5 20 21 0 0 21 10 0 9 21 22 0 0 22 9 0 6 22 22 0 0 22 9 0 6 23 21 0 0 21 10 0 7 24 21 0 0 21 10 0 6 25 21 0 0 21 10 0 6 26 21 0 0 21 10 0 5 27 0 12 9 21 10 0 3 28 0 11 9 20 11 0 2 29 0 11 9 20 11 0 3 30 0 13 9 22 9 0 5 31 0 11 9 20 11 0 4 32 0 11 8 19 12 0 1 33 0 11 8 19 12 0 3 34 0 13 9 22 9 0 8 35 0 12 8 20 11 0 3 36 0 11 7 18 13 0 5 37 0 12 9 21 10 0 5 38 0 11 9 20 11 0 5 39 0 13 6 19 12 0 5 40 0 11 9 20 11 0 4 41 0 11 9 20 11 0 5 42 0 13 9 22 9 0 6 43 0 11 9 20 11 0 3 44 0 11 9 20 11 0 3 45 0 13 9 22 9 0 5 46 0 11 8 19 12 0 3 47 0 11 9 20 11 0 4 48 0 12 9 21 10 0 2
20
Tidak memenuhi minimum hari
Tabel 7 Daftar banyaknya shift menjaga dan libur setiap penjaga gerbang tol dengan metode nonpreemptive goal programming (lanjutan)
Penjaga Shift pagi
Shift
siang
Shift
malam Kerja Libur LML MLM
49 0 12 8 20 11 0 6 50 0 12 9 21 10 0 4 51 0 13 9 22 9 0 5 52 0 13 9 22 9 0 5 53 0 13 8 21 10 0 3 54 0 13 9 22 9 0 5 55 0 13 5 18 13 0 1 56 0 12 9 21 10 0 3 57 0 11 6 17 14 0 4 59 0 13 9 22 9 0 3 60 0 11 8 19 12 0 3 61 0 11 9 20 11 0 5 62 0 13 5 18 13 0 3 63 0 11 9 20 11 0 6 64 0 12 9 21 10 0 4 65 0 13 6 19 12 0 6 66 0 11 8 19 12 0 1 67 0 13 9 22 9 0 3 68 0 13 9 22 9 0 3 69 0 11 8 19 12 0 5 70 0 12 8 20 11 0 2 71 0 11 7 18 13 0 3 72 0 13 9 22 9 0 5 73 0 13 9 22 9 0 7 74 0 11 9 20 11 0 3 75 0 11 9 20 11 0 6 76 0 13 9 22 9 0 4 77 0 12 9 21 10 0 4 78 0 13 6 19 12 0 3
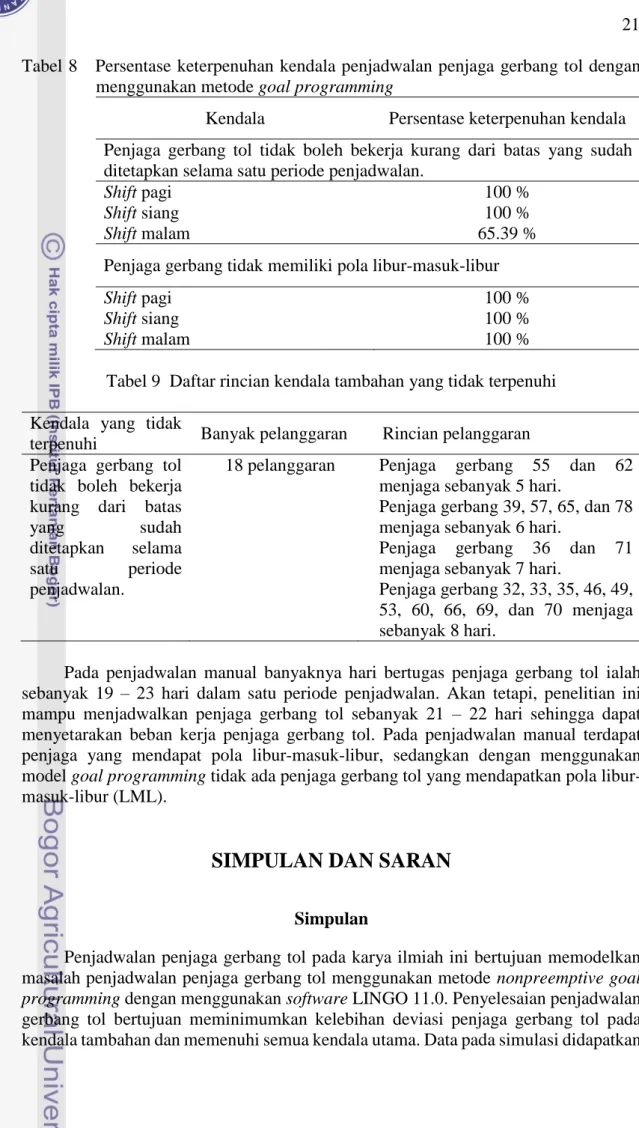
Model dalam masalah ini hanya mengatur kendala tentang libur-masuk-libur (LML). Karena keterbatasan komputasi, kendala masuk-libur-masuk (MLM) tidak dimasukkan ke dalam model, sehingga masih banyak penjaga yang mendapat pola masuk-libur-masuk (MLM) dalam satu periode penjadwalan. Dari hasil nilai variabel deviasi 𝑑, kendala tambahan pertama, kedua, keempat dan kelima berhasil terpenuhi sedangkan pada kendala tiga tidak terpenuhi. Berikut tabel persentase keterpenuhan kendala tambahan yang terdapat pada Tabel 8 sedangkan rincian kendala tambahan yang tidak terpenuhi dapat dilhat pada Tabel 9.
21 Tabel 8 Persentase keterpenuhan kendala penjadwalan penjaga gerbang tol dengan
menggunakan metode goal programming
Kendala Persentase keterpenuhan kendala Penjaga gerbang tol tidak boleh bekerja kurang dari batas yang sudah ditetapkan selama satu periode penjadwalan.
Shift pagi 100 %
Shift siang 100 %
Shift malam 65.39 %
Penjaga gerbang tidak memiliki pola libur-masuk-libur
Shift pagi 100 %
Shift siang 100 %
Shift malam 100 %
Tabel 9 Daftar rincian kendala tambahan yang tidak terpenuhi Kendala yang tidak
terpenuhi Banyak pelanggaran Rincian pelanggaran Penjaga gerbang tol
tidak boleh bekerja kurang dari batas
yang sudah
ditetapkan selama satu periode penjadwalan.
18 pelanggaran Penjaga gerbang 55 dan 62 menjaga sebanyak 5 hari.
Penjaga gerbang 39, 57, 65, dan 78 menjaga sebanyak 6 hari.
Penjaga gerbang 36 dan 71 menjaga sebanyak 7 hari.
Penjaga gerbang 32, 33, 35, 46, 49, 53, 60, 66, 69, dan 70 menjaga sebanyak 8 hari.
Pada penjadwalan manual banyaknya hari bertugas penjaga gerbang tol ialah sebanyak 19 – 23 hari dalam satu periode penjadwalan. Akan tetapi, penelitian ini mampu menjadwalkan penjaga gerbang tol sebanyak 21 – 22 hari sehingga dapat menyetarakan beban kerja penjaga gerbang tol. Pada penjadwalan manual terdapat penjaga yang mendapat pola libur-masuk-libur, sedangkan dengan menggunakan model goal programming tidak ada penjaga gerbang tol yang mendapatkan pola libur-masuk-libur (LML).
SIMPULAN DAN SARAN
Simpulan
Penjadwalan penjaga gerbang tol pada karya ilmiah ini bertujuan memodelkan masalah penjadwalan penjaga gerbang tol menggunakan metode nonpreemptive goal programming dengan menggunakan software LINGO 11.0. Penyelesaian penjadwalan gerbang tol bertujuan meminimumkan kelebihan deviasi penjaga gerbang tol pada kendala tambahan dan memenuhi semua kendala utama. Data pada simulasi didapatkan
22
dari data sekunder penjadwalan Divisi Operasional PT. CMNP, Tbk pada bulan Juli – Agustus 2013. Kendala yang terdapat pada penjadwalan diambil dari peraturan dan SOP karyawan. Peraturan tersebut harus dipenuhi pada kendala utama. Akan tetapi, kendala tambahan bersifat sebaiknya dipenuhi supaya terjadi kenyamanan antara perusahaan dengan penjaga gerbang dan tidak ada kecemburuan antara sesama penjaga gerbang tol.
Berdasarkan hasil yang didapat, diperoleh penjadwalan penjaga gerbang tol yang memenuhi semua kendala utama. Kendala tambahan yang dipenuhi yaitu waktu bekerja pada penjaga gerbang tol shift I dan II terpenuhi dan penjaga gerbang tol tidak mendapat pola libur-masuk-libur sehingga penjadwalan penjaga gerbang tol dapat dimodelkan menggunakan metode nonpreemptive goal programming. Akibatnya, penjadwalan penjaga gerbang tol menggunakan metode ini dapat diaplikasikan pada PT CMNP, Tbk.
Saran
Data pada karya ilmiah ini berasal dari data sekunder PT CMNP, Tbk Jakarta. Akan lebih baik apabila meneliti lebih lanjut apa keinginan penjaga gerbang. Misal, memperhatikan pergantian masalah cuti, memiliki shift yang sama dengan penjaga gerbang yang lain, permintaan hari libur dan harinya. Hasil komputasi penjadwalan pada karya ilmiah ini harus ditulis ulang secara manual dan memiliki data yang cukup banyak. Gerbang dari hasil karya ilmiah ini tidak berurutan, sebaiknya dibuat model agar penjaga gerbang yang menjaga gerbang b di suatu hari mendapatkan gerbang b +1 agar lebih mudah membaca penjadwalannya, dan diadakan sistem 4 hari kerja 2 hari libur berturut-turut sesuai dengan keinginan dari perusahaan. Kemudian, lebih baik dibuat dengan permasalahan tidak ada sistem masuk-libur-masuk pada penjadwalan penjaga gerbang tol. Dalam karya ilmiah ini, hubungan antara shift siang dan shift malam hanya terkait penjaga gerbang tol yang sama, sebaiknya dibuat hubungan tentang hari kerja di antara mereka. Misalkan, penjaga gerbang menjaga 2 hari pada shift siang, 2 hari pada shift malam, dan 2 hari libur.
DAFTAR PUSTAKA
Azaiez MN & Al Sharif SS. 2005. A 0-1 goal programming model for nurse scheduling. Computer & Operations Research. 32:491-507. doi: 10.1016/S0305-0548(03)00249-1.
[CMNP] Citra Marga Nusaphala Persada. 2013. Peraturan Disiplin Tugas Pengumpul Tol SK Direksi Nomor 833 Tahun 2013. Jakarta (ID): CMNP.
Hillier FS, Lieberman JG. 1990. Pengantar Riset Operasi. Edisi kelima. Jakarta (ID): Penerbit Erlangga.
[PU] Kementerian Pekerjaan Umum. 2005. Peraturan Pemerintah Republik Indonesia Nomor 15 Tahun 2005 tentang Jalan Tol. Jakarta (ID): KPU.
[PU] Kementerian Pekerjaan Umum. 2006. Peraturan Pemerintah Nomor 34 Tahun 2006 tentang Jalan. Jakarta (ID): KPU.
Sarker RA, Newton CS. 2008. Optimization Modelling : A Practical Approach. New York (US) : CRC Pr.
23 Siswanto. 1993. Goal Programming Menggunakan Lindo. Jakarta (ID): PT Elex Media
Komputindo.
24
Lampiran 1 Sintaks LINGO 11.0 untuk menyelesaikan masalah goal programming
!fungsi tujuan; min = d1m + d2m + d3m; !kendala constraints; 200*x - d1p + d1m = 1000; 100*x + 400*y - d2p + d2m =1200; 250*y - d3p + d3m = 800; 1500*x + 3000*y <= 15000; x>=0;y>=0;
Global optimal solution found.
Objective value: 175.0000 Infeasibilities: 0.000000 Total solver iterations: 3
Variable Value Reduced Cost
D1M 0.000000 0.3750000 D2M 0.000000 1.000000 D3M 175.0000 0.000000 X 5.000000 0.000000 D1P 0.000000 0.6250000 Y 2.500000 0.000000 D2P 300.0000 0.000000 D3P 0.000000 1.000000
Row Slack or Surplus Dual Price
1 175.0000 -1.000000 2 0.000000 -0.6250000 3 0.000000 0.000000 4 0.000000 -1.000000 5 0.000000 0.8333333E-01 6 5.000000 0.000000 7 2.500000 0.000000
Lampiran 2 Sintaks LINGO 11.0 untuk menyelesaikan masalah nonpreemptive goal programming
!fungsi tujuan;
min = 12*d1m + 22*d2m + 13*d3m;
!kendala;
25 100*x + 400*y - d2p + d2m =1200; 250*y - d3p + d3m = 800; 1500*x + 3000*y <= 15000; x>=0; y>=0;
Global optimal solution found.
Objective value: 2275.000 Infeasibilities: 0.000000 Total solver iterations: 3
Variable Value Reduced Cost
D1M 0.000000 3.87500 D2M 0.000000 22.00000 D3M 175.0000 0.000000 X 5.000000 0.000000 D1P 0.000000 8.125000 Y 2.500000 0.000000 D2P 300.0000 0.000000 D3P 0.000000 13.00000 Row Slack or Surplus Dual Price 1 2275.000 -1.000000 2 0.000000 -8.125000 3 0.000000 0.000000 4 0.000000 -13.00000 5 0.000000 1.083333 6 5.000000 0.000000 7 2.500000 0.000000
Lampiran 3 Sintaks LINGO 11.0 untuk menyelesaikan masalah penjadwalan penjaga gerbang tol dengan metode nonpreemptive goal programming
!penjadwalan penjaga gerbang tol; !metode non preemptive
MODEL UMUM; sets: penjaga/1..78/:d3m,d3p,d1m,d1p,d2m,d2p; hari/1..31/:sp,ss,sm; gerbang/1..21/; link(penjaga,hari):xjl,d4m,d4p,d5m,d5p; link_1(penjaga,gerbang,hari):xsp,xss,xsm; link_2(gerbang,hari);
26
gerbangpagi(gerbang)/1,2,3,4,5,8,9,10,11,12,13,14,15,16,1 7,18,19,20/;!gerbang pagi itu subset dari gerbang;
gerbangsiang(gerbang)/1,2,3,4,5,6,7,8,9,10,11,12,13,14,15 ,16,17,18,19,20/;!gerbang siang subset dari gerbang;
gerbangmalam(gerbang)/1,2,3,6,8,9,12,14,15,16,17,18,19,20 ,21/; endsets data: sp = 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18; ss = 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20; sm = 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14 14; enddata !fungsi objektif; min = 4*@sum(penjaga(i):d1m(i))+3*@sum(penjaga(i):d2m(i))+3*@su m(penjaga(i):d3m(i))+2*@sum(link(i,k):d4p(i,k))+2*@sum(li nk(i,k):d5p(i,k)); @for(link_1(i,b,k):@bin(xsp(i,b,k))); @for(link_1(i,b,k):@bin(xss(i,b,k))); @for(link_1(i,b,k):@bin(xsm(i,b,k))); @for(link(i,k):@bin(xjl(i,k))); !kendala Utama; !1;@for(hari(k):@sum(penjaga(i)|i#le#26:@sum(gerbang(b):x sp(i,b,k)))>=sp(k)); !2;@for(hari(k):@sum(penjaga(i)|i#gt#26:@sum(gerbang(b):x ss(i,b,k)))>=ss(k)); !3;@for(hari(k):@sum(penjaga(i)|i#gt#26:@sum(gerbang(b):x sm(i,b,k)))>=sm(k)); !4;@for(hari(k):@sum(penjaga(i)|i#gt#26:@sum(gerbang(b):x sp(i,b,k)))=0); !5;@for(hari(k):@sum(penjaga(i)|i#le#26:@sum(gerbang(b):x ss(i,b,k)))=0); !6;@for(hari(k):@sum(penjaga(i)|i#le#26:@sum(gerbang(b):x sm(i,b,k)))=0); !7;@for(hari(k):@for(penjaga(i):xsp(i,6,k)=0));@for(hari( k):@for(penjaga(i):xsp(i,7,k)=0));@for(hari(k):@for(penja ga(i):xsp(i,21,k)=0)); !8;@for(hari(k):@for(penjaga(i):xss(i,21,k)=0)); !9;@for(hari(k):@for(penjaga(i):xsm(i,4,k)=0));!9;@for(ha ri(k):@for(penjaga(i):xsm(i,5,k)=0));!9;@for(hari(k):@for
27 (penjaga(i):xsm(i,7,k)=0));!9;@for(hari(k):@for(penjaga(i ):xsm(i,10,k)=0)); !9;@for(hari(k):@for(penjaga(i):xsm(i,11,k)=0));!9;@for(h ari(k):@for(penjaga(i):xsm(i,13,k)=0));!9;@for(hari(k):@f or(penjaga(i):xsm(i,18,k)=0)); !10;@for(penjaga(i):@for(hari(k)|k#le#27:xjl(i,k)+xjl(i,k +1)+xjl(i,k+2)+xjl(i,k+3)+xjl(i,k+4)>=1)); !11;@for(link(i,k):@sum(gerbang(b):xsp(i,b,k))+@sum(gerba ng(b):xss(i,b,k))+@sum(gerbang(b):xsm(i,b,k))+xjl(i,k)=1) ;
!yang berhubungan dengan shift pagi
!1a;@for(gerbang(b)|b#le#5:@for(penjaga(i)|i#le#26:@sum(h ari(k):xsp(i,b,k))<=2)); !1b;@for(gerbang(b)|b#ge#8#and#b#le#20:@for(penjaga(i)|i# le#26:@sum(hari(k):xsp(i,b,k))<=2)); !2;@for(penjaga(i)|i#le#26:@for(hari(k):@sum(gerbang(b):x sp(i,b,k))<=1)); !3;@for(gerbang(b):@for(hari(k):@sum(penjaga(i)|i#le#26:x sp(i,b,k))<=1)); !4;@for(penjaga(i)|i#le#26:@sum(gerbang(b):@sum(hari(k):x sp(i,b,k)))<=22);
!yang berhubungan dengan shift siang
!1a;@for(gerbang(b)|b#le#20:@for(penjaga(i)|i#gt#26:@sum( hari(k):xss(i,b,k))<=2)); !2;@for(penjaga(i)|i#gt#26:@for(hari(k):@sum(gerbang(b):x ss(i,b,k))<=1)); !3;@for(gerbang(b):@for(hari(k):@sum(penjaga(i)|i#gt#26:x ss(i,b,k))<=1)); !4;@for(penjaga(i)|i#gt#26:@sum(gerbang(b):@sum(hari(k):x ss(i,b,k)))<=13);
!yang berhubungan dengan shift malam
!1a;@for(gerbang(b)|b#ne#4:@for(penjaga(i)|i#gt#26:@sum(h ari(k):xsm(i,b,k))<=2)); !1a;@for(gerbang(b)|b#ne#5:@for(penjaga(i)|i#gt#26:@sum(h ari(k):xsm(i,b,k))<=2)); !1a;@for(gerbang(b)|b#ne#7:@for(penjaga(i)|i#gt#26:@sum(h ari(k):xsm(i,b,k))<=2)); !1a;@for(gerbang(b)|b#ne#10:@for(penjaga(i)|i#gt#26:@sum( hari(k):xsm(i,b,k))<=2)); !1a;@for(gerbang(b)|b#ne#11:@for(penjaga(i)|i#gt#26:@sum( hari(k):xsm(i,b,k))<=2)); !1a;@for(gerbang(b)|b#ne#13:@for(penjaga(i)|i#gt#26:@sum( hari(k):xsm(i,b,k))<=2)); !1a;@for(gerbang(b)|b#ne#18:@for(penjaga(i)|i#gt#26:@sum( hari(k):xsm(i,b,k))<=2));
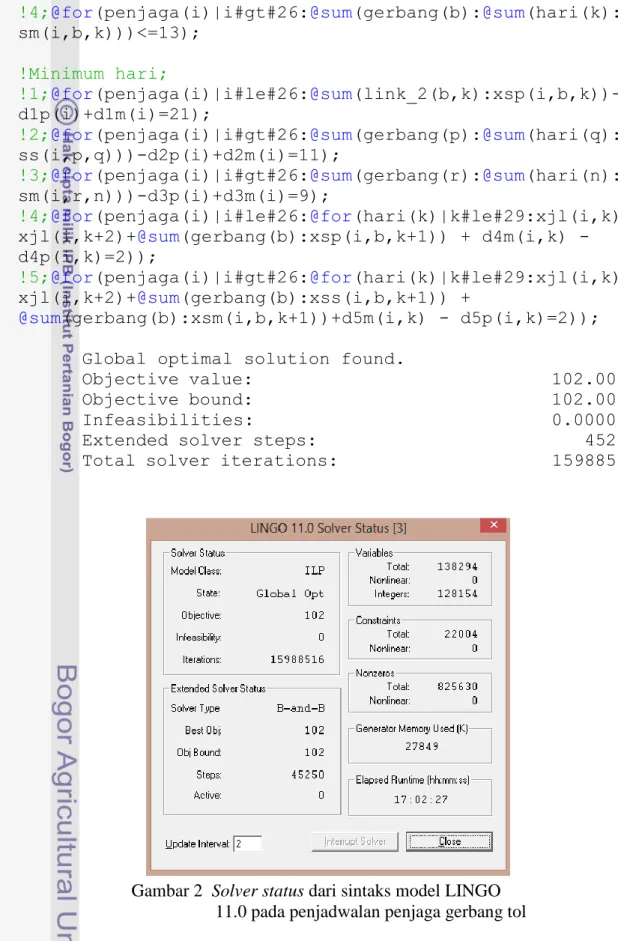
28 !2;@for(penjaga(i)|i#gt#26:@for(hari(k):@sum(gerbang(b):x sm(i,b,k))<=1)); !3;@for(gerbang(b):@for(hari(k):@sum(penjaga(i)|i#gt#26:x sm(i,b,k))<=1)); !4;@for(penjaga(i)|i#gt#26:@sum(gerbang(b):@sum(hari(k):x sm(i,b,k)))<=13); !Minimum hari; !1; @for(penjaga(i)|i#le#26:@sum(link_2(b,k):xsp(i,b,k))-d1p(i)+d1m(i)=21); !2;@for(penjaga(i)|i#gt#26:@sum(gerbang(p):@sum(hari(q):x ss(i,p,q)))-d2p(i)+d2m(i)=11); !3;@for(penjaga(i)|i#gt#26:@sum(gerbang(r):@sum(hari(n):x sm(i,r,n)))-d3p(i)+d3m(i)=9); !4;@for(penjaga(i)|i#le#26:@for(hari(k)|k#le#29:xjl(i,k)+ xjl(i,k+2)+@sum(gerbang(b):xsp(i,b,k+1)) + d4m(i,k) - d4p(i,k)=2)); !5;@for(penjaga(i)|i#gt#26:@for(hari(k)|k#le#29:xjl(i,k)+ xjl(i,k+2)+@sum(gerbang(b):xss(i,b,k+1)) + @sum(gerbang(b):xsm(i,b,k+1))+d5m(i,k) - d5p(i,k)=2)); Global optimal solution found.
Objective value: 102.0000 Objective bound: 102.0000 Infeasibilities: 0.000000 Extended solver steps: 45250 Total solver iterations: 15988516
Gambar 2 Solver status dari sintaks model LINGO 11.0 pada penjadwalan penjaga gerbang tol