iii
DAFTAR ISI
Kata Pengantar Ketua LPPM UNY ...i Kata Pengantar Ketua Panitia Seminar Nasional ... ii Daftar Isi ... iii
BIDANG PENDIDIKAN
1. Pengembangan Subject Specific Pedagogy Tematik untuk Mengembangkan Karakter Siswa Sekolah Dasar
Insih Wilujeng, Muhsinatun Siasah Masruri, dan Muhammad Nur Wangid ... 1
2. Strategi Peningkatkan Kemampuan Teacherpreuner Melalui Model Partnership Guru Produktif SMK dengan DUDI
Endang Mulyatiningsih, Sugiyono, dan Sutriyati Purwanti ... 21
3. Latihan Imageri untuk Meningkatkan Keterampilan Teknik Lay-up Shoot Bola Basket
Dimyati, Sri Winarni, Tri Ani Astuti, dkk. ... 40
4. Tri Sakti sebagai Sarana Pembentuk Entrepreneurship Building (Kajian Best Practice Guru)
Dwi Ermavianti dan Wahyu Sulistyorini ... 55
5. Implementasi Model Pendidikan Wirausaha Berbasis Hypnometacreativepreneur untuk Menghasilkan Wirausaha yang Memiliki Keyakinan, Mindset, Spiritual, dan Kreativitas Positip Kompetitif
Subiyono, Sutiyono, dan Moerdiyanto ... 73
6. Pembelajaran Praktik Pemesinan Berbasis Collaborative Skill sebagai Upaya Peningkatan Mutu Lulusan Pendidikan Vokasi
Dwi Rahdiyanto, Putut Hargiyarto, Asnawi ... 93
7. Identifikasi Latihan Visualisasi Atlet Selabora Senam FIK UNY Tahun 2014
Ch. Fajar Sriwahyuniati dan Ratna Budiarti ... 108
8. Kelayakan Software ANBUSO Sebagai Alat Analisis Butir Soal bagi Guru
Ali Muhson, Barkah Lestari, Supriyanto, dan Kiromim Baroroh ... 123
9. Pengembangan Media Komik IPA Terpadu Berbasis Pendidikan Karakter untuk Peserta Didik SMP
AK Prodjosantoso, Jumadi, dan Bambang Subali ... 139
10. Standarisasi Kualitas Butir Tes Ujian Sekolah Menggunakan Teknik Equating dan Program QUEST untuk Menjamin Penilaian Portofolio pada SNMPTN
Dadan Rosana dan Sukardiyono ... 145
11. Profil Kompetensi Sosial Mahasiswa Calon Guru Universitas Negeri Yogyakarta
Suparman, A. Manap, dan M. Yamin ... 157
12. Pengembangan Bahan Ajar Sastra Karawitan Melalui Model Eksibisi Seni di SMA Negeri 9 Yogyakarta
iv
13. Program Pemantapan Penyesuaian Diri dengan Bimbingan Konseling Kelompok Rational Behaviour Therapy (REBT): Model Pendampingan Mahasiswa Baru
MM Sri Hastuti dan Juster Donal Sinaga ... 188
14. Upaya Peningkatan Kualitas Pembelajaran Sistem Robotika Melalui Pendekatan Problem Based Learning Berbantuan Robot Manipulator Dengan Neural Network Backpropagation
Nur Kholis, Moh. Khairudin, Haryanto ... 205
15. Komik Sosiologi: Jembatan untuk Memahami Realitas Sosial
Grendi Hendrastomo, Poerwanti Hadi Pratiwi ... 218
16. Pengembangan Sistem Tes Diagnostik Kesulitan Belajar Kompetensi Dasar Kejuruan Siswa SMK
Samsul Hadi, K. Ima Ismara, dan Effendie Tanumihardja ... 232
17. Pemberdayaan Lingkungan dan Teknologi untuk Mewujudkan Insan yang Unggul
Haryadi, Tadkiroatun Musfiroh, Suwardi ... 241
18. Pengembangan Multimedia Pembelajaran untuk Pendidikan Karakter di SD
C. Asri Budiningsih ... 253
19. Pengembangan Keprofesian Berkelanjutan Guru SMK Program Keahlian Ketenagalistrikan Menggunakan Multimedia Interaktif Berbasis Portal e-learning
Soeharto, Sukir, dan Ariadie Chandra Nugraha ... 277
20. Pendampingan Implementasi Kurikulum 2013 bagi Kepala SD Provinsi Jawa Tengah
Slameto ... 295
21. Pembinaan Karakter Kewargaan Multikultural dalam Program Kurikuler di Madrasah Aliyah se-Daerah Istimewa Yogyakarta
Samsuri dan Marzuki ... 316
22. Pengukuran Transferable Skills Mahasiswa Berdasarkan QAA for Higher Education
Siswandari dan Binti Muchsini ... 332
23. Studi Tingkat Kesulitan Mahasiswa dalam Menyelesaikan Skripsi Berbasis Penelitian Kualitatif (Studi Kasus Program Studi Pendidikan Seni Rupa FKIP UNS Surakarta
Slamet Subiyantoro dan Endang Widyastuti ... 350
24. Analisis Pengembangan Sistem Informasi Penilaian Kualitas E-Learning
Muhammad Munir dan Handaru Jati ... 364
25. Validitas Tes Keterampilan Bermain Futsal
Agus Susworo Dwi Marhaendro ... 373
26. Model Pembelajaran Praktik Pengayaan Motor Listrik Arus Searah Berbantuan Program DELPHI
Istanto Wahyu Djatmiko, Sunyoto, dan Deny Budi Hertanto ... 390
27. Pengembangan Model Pendidikan Karakter Sebagai Upaya Peningkatan Personal dan Social Skill bagi Anak Jalanan di Daerah Istimewa Yogyakarta
Aman, Lia Yuliana, dan Ngadirin Setiawan ... 401
v
28. Melatih Kecerdasan Majemuk Anak Usia Dini dalam Pembelajaran
Haryanto ... 433
29. Efektivitas Trainer Digital Berbasis Mikrokontroler dengan Model Briefcase Sebagai Sarana Pembelajaran Praktik di SMK
Umi Rochayati dan Suprapto ... 447
30. Penggunaan Program Differential Reinforcement of Other Behavior (DRO) untuk Mengurangi Perilaku Mengganggu Anak Tunarungu Saat Pembelajaran (Studi Kasus A+B di Kelas VII SLB B YRTRW Surakarta
Grahita Kusumastuti ... 464
31. Implementasi Model Pembelajaran Jigsaw untuk Meningkatkan Keaktifan Berpendapat dan Ketuntasan Belajar IPS
Kiswanti ... 477
32. Pengembangan Pedoman Ruang Ramah Anak (Child Friendly Space) Berbasis Kearifan Lokal untuk Fasilitas Pendidikan Anak Usia Dini
Hajar Pamadhi, Dwi Retno Ambarwati, Eni Puji Astuti ... 490
33. Pengembangan Model Pendidikan Karakter Pada Anak Usia Dini Melalui Lagu dan Dolanan
Mami Hajaroh, Rukiyati, Sudaryanti, Joko Pamungkas ... 509
34. Budaya dan Kearifan Lokal sebagai Modal Penyelenggaraan Pendidikan Multikultural di Kabupaten Poso Sulawesi Tengah
Saliman, Taat Wulandari, dan Mukminan... 522
35. Model Modifikasi Perilaku Terintegrasi Pembelajaran Untuk Mengurangi Perilaku Bermasalah Saat Pembelajaran pada Siswa dengan Gangguan Emosi dan Perilaku
Edi Purwanta, Aini Mahabbati, dan Pujaningsih ... 535
36. Penerapan Metode Pembelajaran Tari Bambu dalam Meningkatkan Keaktifan dan Hasil Belajar IPS
Sri Purwanti ... 551
37. Upaya Meningkatkan Ketrampilan Mencolet dan Hasil Belajar Membatik Melalui Metode Pembelajaran Contextual Teaching and Learning Berbantuan Video
Endriyani ... 561
38. Studi Analisis Proses Penyusunan dan Implementasi Rencana Pengembangan Sekolah pada Sekolah Berbasis Multikultural: Studi Kasus di SMA Selamat Pagi Indonesia Batu
Nunuk Hariyati ... 570
39. Aktivitas Kolaboratif dan Faktor yang Mempengaruhinya: Studi Pada Pembekalan Profesionalisme Calon Guru Kimia
Antuni Wiyarsi, Sumar Hendayana, Harry Firman, Sjaeful Anwar ... 587
40. Prestasi Belajar Akuntansi Keuangan Menengah 1 Ditinjau dari Partisipasi Mahasiswa dalam Organisasi Mahasiswa dan Kemandirian Belajar Mahasiswa Pendidikan Ekonomi Akuntansi Fakultas Keguruan dan Ilmu Pendidikan Universitas Muhammadiyah Surakarta Angkatan 2012
vi
41. Pembelajaran Etika Bisnis Menggunakan Pendekatan Framework-Based Untuk Mencegah Creative Accounting
Ratna Candra Sari, Dhyah Setyorini, Mimin Nur Aisyah, Annisa Ratna Sari ... 608
42. Rekayasa CNC Turning sebagai Media Pembelajaran CNC
Bambang Setiyo Hari Purwoko ... 623
43. Muatan Pendidikan Karakter dalam Buku Teks Pelajaran Bahasa Inggris
Sugirin, Agus Widyantoro, Siti Sudartini ... 638
44. Pengembangan Model Pembelajaran Entrepreneurship Untuk Anak Usia Dini
Martha Christianti, Nur Cholimah, dan Bambang Suprayitno ... 652
45. Uji Penggunaan Aplikasi Physics Mobile Learning Ditinjau dari Hasil Belajar Peserta Didik
Sabar Nurohman, Suyoso ... 662
46. Pengembangan Kosakata Siswa SMK Menggunakan Mobile Phone
Sugirin, Joko Priyana, Ella Wulandari, Nunik Sugesti, Lusi Nurhayati ... 676
47. Kesiapan Guru SMK Program Keahlian Teknik Bangunan di Daerah Istimewa Yogyakarta dalam Mengimplementasikan Kurikulum 2013
Amat Jaedun, V. Lilik Hariyanto dan Nuryadin, E.R. ... 701
48. Pengembangan Model Praktik Mengajar Reflektif: Upaya Meningkatkan Kompetensi Pedagogik dan Membentuk Karakter Pendidik Profesional Mahasiswa PGSD ... 718
Haryono, Hardjono, Budiyono, dan Yuli Utanto
49. Kemampuan Mahasiswa PJKR FIK UNY dalam Menyusun Rencana Pelaksanaan Pembelajaran pada Pengajaran Mikro Tahun 2014
Tri Ani Hastuti, Nur Rohmah Muktiani dan A. Erlina Listyarini ... 732
50. Peran Self-Assessment pada Pembelajaran Praktek Menjahit
Emy Budiastuti ... 751
51. Pengembangan Modul Perangkat Pembelajaran Robot Intelligent Direction Detector dengan Pendekatan Student Centered Learning Berbasis Masalah Untuk Pembelajaran Sistem Kendali Fuzzy
Haryanto ... 761
52. Pengembangan Model Rekayasa Mitigasi Bencana Geologi Berorientasi pada Emergency Preparedness dan Disaster Awarness untuk Menumbuhkan Karakter Tanggap Bencana dalam Pembelajaran IPA di Sekolah Dasar
Woro Sri Hastuti, Pujianto, dan Supartinah ... 780
53. Pembentukan Karakter Berpikir Kritis Mahasiswa Melalui Pembelajaran Pendidikan Konsumen Berbasis Masalah Sebagai Asesmen Alternatif
Sri Wening ... 796
54. Keterampilan Proses Sains untuk Anak Anak Berkebutuhan Khusus
vii
55. Analisis Pedagogic Content Knowledge (PCK) terhadap Buku Pegangan Guru IPA SMP/MTs Kelas VIII pada Implementasi Kurikulum 2013
Maryati dan Susilowati ... 826
56. Efektifitas Penggunaan Media Gambar untuk Peningkatan Kosa Kata Benda Pada Siswa Tuna Rungu di SLB B Dena Upakara Wonosobo
Eko Hari Parmadi , Priyo Widiyanto, dan Ratri Sunar Astuti ... 846
57. Evaluasi Program Kewirausahaan Masyarakat Bidang Boga di Daerah Istimewa Yogyakarta
Marwanti ... 861
58. Upaya Meningkatkan Kreativitas, Minat Belajar, dan Hasil Belajar Sosiologi Menggunakan Software Autoplay Media Studio
Afiri N Kurniawan ... 878
59. Antara Konstruksi Nasionalisme dan Pengembangan Model Pembelajaran Ilmu Pengetahuan Sosial (IPS) (Studi Kasus Peranan Pembelajaran IPS Sekolah Menengah Pertama (SMP) dalam Rangka Membangun Konstruksi Nasionalisme Generasi Muda di Surabaya
Sarmini ... 893
60. Efektivitas Pembelajaran PAI dengan Pendekatan Social Emotional Learning (SEL) untuk Memperbaiki Karakter dan Akhlak Mulia
Akif Khilmiyah ... 914
61. Strategi Membangun Learning Organization Sebagai Upaya Peningkatan Mutu Pembelajaran dan Kinerja Sekolah Menengah Kejuruan
Giri Wiyono ... 929
62. Pengembangan Model Evaluasi Diklat Orientasi Dampak (MEDOK) dengan Referensi Diklat Nasional Penguatan Kompetensi Pengawas SMK di Daerah Istimewa Yogyakarta
Sutarto HP, Husaini Usman, dan Amat Jaedun ... 942
63. Keefektifan Model Pembelajaran Berbasis Budaya (PBB) untuk Meningkatkan Hasil Belajar IPS
Firosalia Kristin ... 957
64. Pengaruh Pendekatan Project Based Learning terhadap Kreativitas Belajar IPS Mahasiswa Calon Guru SD
Naniek Sulistya Wardani ... 971
65. Pemetaan Capaian Standar PAUD Fullday di DIY
205
UPAYA PENINGKATAN KUALITAS PEMBELAJARAN SISTEM ROBOTIKA MELALUI PENDEKATAN PROBLEM BASED LEARNING BERBANTUAN
ROBOT MANIPULATOR
DENGAN NEURAL NETWORK BACKPROPAGATION Nur Kholis, Moh. Khairudin, dan Haryanto
Universitas Negeri Yogyakarta,
email:[email protected], [email protected], [email protected] Abstrak
Tujuan penelitian ini adalah untuk: 1) mengembangkan perangkat keras robot manipulator dengan sistem kendali keseimbangan gerak menggunakan NN model backpropagation; 2) mengembangkan perangkat dan panduan pembelajaran sistem kendali robot manipulator; 3) mengetahui efektivitas metode problem based learning berbantuan robot manipulator dalam upaya meningkatkan penguasaan kompetensi mahasiswa bidang robotika.
Kegiatan penelitian ini dilakukan dalam waktu 3 tahun di Jurusan Pendidikan Teknik Elektro (JPTE) FT UNY. Langkah-langkah dalam penelitian meliputi: 1) Tahun
Pertama Pengembangan perangkat robot manipulator dengan keras sistem kendali
keseimbangan gerak menggunakan neural network (NN) model backpropagation yang meliputi hardware dan software yang akan digunakan sebagai media pembelajaran pada matakuliah Sistem Robotika. 2) Tahun kedua, mengembangkan perangkat pembelajaran robot manipulator dengan sistem kendali keseimbangan menggunakan NN model backpropagation yang berupa rencana program pembelajaran (RPP), modul, hand-out, job-sheet, panduan pembelajaran berbasis problem based learning, dan panduan pembelajaran yang berpusat pada mahasiswa. 3) Tahun ketiga, implementasi pembelajaran dengan strategi pembelajaran yang berpusat pada mahasiswa, dengan metode problem based learning pada studi sistem kendali kesimbangan robot manipulator menggunakan NN model backpropagation untuk memperoleh pembelajaran yang efektif. Penelitian dilakukan pada Program Studi Pendidikan Mekatronika FT UNY untuk matakuliah Robotika. Teknik pengambilan data dilakukan dengan observasi/pengamatan, tes, dokumentasi dan kuesioner. Teknik analisis data yang digunakan adalah deskriptif kualitatif dan statistik inferensial untuk megetahui efektivitas media pembelajaran robot.
Hasil penelitian pada tahun pertama adalah: (1) telah diperoleh skala laboratorium robot manipulator dengan sistem kendali kesimbangan menggunakan NN model backpropagation. Selanjutnya untuk tahun ke-2 direncanakan diperolehnya perangkat dan panduan pembelajaran sistem kendali robot manipulator untuk pembelajaran Robotika. Pada tahun ke-3 direncanakan diperoleh gambaran bukti peningkatan kemampuan mahasiswa yang ditunjukkan dengan peningkatan pencapaian kompetensi mahasiswa dalam perkuliahan.
Kata Kunci: media pembelajaran, NN model backpropagation, problem based learning, sistem kendali, robot manipulator.
PENDAHULUAN
Perkembangan teknologi semakin menuntut dunia pendidikan untuk dapat meningkatkan relevansinya. Dengan kata lain dunia pendidikan perlu banyak upgrade tentang kualitas dan kuantitas pertumbuhannya. Dampaknya terhadap proses pendidikan adalah diperlukan pembelajaran yang menuntut adanya upaya pengembangan kapasitas
206 dan kualitas para pelaku pendidikan (mahasiswa, dosen, masyarakat pengguna pendidikan) secara optimal dan kreatif dalam memanfaatkan lingkungan sekitar.
Berdasarkan tuntutan ini maka perlu adanya migrasi model pembelajaran dari mulai pembelajaran egosentris (teacher centered learning) kepada pembelajaran yang berorientasi pada kreatifitas dan aktifitas mahasiswa (student centered learning, SCL). Perlu banyak perubahan paradigma saat ujicoba migrasi menuju SCL ini. Pada sisi mahasiswa sangat dituntut kedewasaan dan kemapanan dalam berfikir dan bertindak sehingga mampu beradaptasi dengan kecerdasan emosional, intellektual dan mental/spiritual. Di sisi lain dosen perlu ekstra mengusahakan pembelajaran agar mahasiswa dapat secara yang aktif dalam proses pencarian pengetahuan sehingga akan sangat membekas dalam diri mahasiswa.
Bertumpu pada stressing point perlu adanya proses belajar mengajar (PBM) yang aktif dari dosen dan mahasiswa maka dalam penelitian ini mengangkat satu mata kuliah yang relatif sulit untuk kalangan mahasiswa Jurusan Pendidikan Teknik Elektro (JPTE), FT, UNY yaitu matakuliah Sistem Robotika. Pada kenyataannya kondisi yang ideal belum sepenuhnya terpenuhi, pembelajaran Sistem Robotika belum bisa menghasilkan mahasiswa yang berkapasitas dan berkualitas dalam intelektual dan emosional. Hal ini dimungkinkan karena proses dan model pembelajaran belum sepenuhnya menggunakan SCL mengingat untuk itu sangat diperlukan media pendidikan atau media pembelajaran yang dekat dengan lingkungan belajar mahasiswa sehingga mampu menginspirasi dan mengasah kemampuannya. Oleh sebab itulah dalam penelitian ini mengusulkan pengembangan media pendidikan yang sarat dan akrab dengan kondisi lingkungan mahasiswa sehingga dimungkinkan pembelajaran akan berjalan dengan aktif, inovatif, kreatif, efektif dan menyenangkan.
Sehubungan dengan permasalahan seperti yang dijelaskan di atas, metode pembelajaran yang diusulkan untuk diterapkan dalam matakuliah Sistem Robotika adalah problem based learning. Alasan utama pembelalajaran problem based learning dalam perkuliahan ini adalah (1) Pembelajaran memerlukan ilustrasi langsung terhadap masalah yang dihadapi dalam dunia sesungguhnya sehingga terdapat korelasi dengan buku teks, (2) Pembelajaran berbasis kuliah saja seringkali membosankan, (3) Proses belajar yang efektif adalah yang melibatkan refleksi (double loop learning). Diharapkan dengan melibatkan mahasiswa dalam proses problem based learning, mahasiswa akan memiliki pemahaman yang lebih baik.
Fasilitas dan infrastruktur untuk pembelajaran mata kuliah Sitem Robotika seperti kit modul untuk demontrasi dalam mata kuliah teori Sistem Robotika maupun kit modul aplikasi dalam mata kuliah Sistem Robotika di JPTE masih kurang. Hal ini merupakan
207 salah satu faktor yang menyebabkan sangat minimnya kemampuan mahasiswa dalam mengembangkan ide untuk mengaitkan kemampuannya dengan permasalahan dunia nyata. Hal yang riil mahasiswa masih relatif kesulitan menggali ide untuk dapat mengerjakan project akhir kuliah, padahal mata kuliah Sistem Robotika adalah matakuliah pengembangan perangkat keras bagi project akhir kuliah di JPTE. Oleh karena itu pada penelitian ini akan dirancang media pendidikan berupa sistem kendali keseimbangan robot manipulator menggunakan Neural Network (NN) dengan fungsi aktivasi backpropagation.
Ketidakseimbangan gerakan lengan robot pada robot manipulator pada saat membawa barang bawaan yang bervariasi selalu akan terjadi. Hal ini mengakibatkan susah untuk mendapatkan posisi tujuan yang ditargetkan. Oleh karena itu perlu dilakukan pengembangan sistem kendali keseimbangan yang cerdas menggunakan NN dengan fungsi aktivasi backpropagation, agar diperoleh gerakan robot yang handal terhadap semua keseimbangan gerakan saat terjadi perubahan barang bawaan. Sistem kendali cerdas menggunakan NN dengan fungsi aktivasi backpropagation yang akan dilakukan dalam penelitian ini adalah untuk menjaga keseimbangan gerakan pada saat terjadi perubahan variasi beban.
Berdasarkan uraian di atas maka dapat dirumuskan permasalahan penelitian sebagai berikut: (1) bagaimanakah robot manipulator dengan sistem kendali keseimbangan menggunakan NN dengan fungsi aktivasi backpropagation yang baik, yang dapat digunakan untuk media pembelajaran matakuliah Sistem Robotika agar mahasiswa dapat mengembangkan kecerdasan intelektual dan emosional? (dilakukan pada tahun pertama), (2) bagaimanakah perangkat pembelajaran dan panduan media pembelajaran sistem kendali keseimbangan robot manipulator yang dapat diterapkan untuk pembelajaran berbasis problem based learning dan pembelajaran yang berpusat pada aktivitas mahasiswa guna meningkatkan kecerdasan intelektual dan emosional mahasiswa terhadap matakuliah Sistem Robotika? (dilakukan pada tahun kedua), (3) bagaimanakah pengaruh penerapan metode pembelajaran berbasis problem based learning dengan permasalahan yang ada pada sistem kendali keseimbangan robot manipulator dengan sistem kendali cerdas NN terhadap efektifitas pembelajaran matakuliah Sistem Robotika? (dilakukan pada tahun ketiga).
Selanjutnya penelitian bertujuan sebagai berikut: (1) memperoleh media pembelajaran berupa robot manipulator dengan sistem kendali keseimbangan menggunakan NN dengan fungsi aktivasi backpropagation yang baik, (2) memperoleh perangkat pembelajaran dan panduan media pembelajaran sistem kendali keseimbangan robot manipulator untuk pembelajaran berbasis problem based learning dan pembelejaran yang
208 dapat meningkatkan prestasi mahasiswa dalam matakuliah Sistem Robotika, (2) mengetahui pengaruh penerapan metode pembelajaran berbasis problem based learning berbantuan robot manipulator dengan sistem kendali menggunakan NN terhadap efektivitas pembelajaran matakuliah Sistem Robotika.
Selain itu, manfaat penelitian yang dapat diperoleh sebagai bentuk kontribusi penelitian bagi Jurusan Pendidikan Teknik Elektro dan stakeholder UNY adalah perbaikan pada media pembelajaran, strategi proses pembelajaran matakuliah Sistem Robotika. Selanjutnya diharapkan dapat memberikan manfaat: 1) bagi mahasiswa untuk meningkatkan pemahaman materi dan hasil belajar yang sesuai dengan kondisi riil (kontekstual); 2) bagi dosen diperoleh media model robot cerdas pada robot manipulator dengan sistem kendali menggunakan NN backpropagation yang meeliputi hardware, software, manual instruction dan jobsheet serta model pembelajaran yang sesuai untuk meningkatkan kualitas pembelajaran matakuliah system robotika dan kualitas prestasi hasil belajar; 3) bagi lembaga (Jurusan Pendidikan Teknik Elektro) untuk meningkatkan kualitas layanan terhadap mahasiswa melalui proses pembelajaran yang tepat dan kualitas lulusan yang kompeten dan kompetitif.
METODE
Penelitian ini dilakukan dalam kurun waktu 3 tahun. Penelitian tahun pertama adalah mengembangkan media pembelajaran dan telah diperoleh sebuah robot manipulator dengan sistem kendali keseimbangan menggunakan NN dengan fungsi aktivasi backpropagation. Tahun kedua mengembangkan produk perangkat pembelajaran dan panduan media pembelajaran sistem kendali keseimbangan robot manipulator. Tahun ketiga adalah impelementasi produk tahun pertama dan kedua dalam proses pembelajaran.
Pada tahap implementasi produk adalah menerapkan produk robot dan produk perangkat pembelajaran serta panduan praktikum dalam proses pembelajaran dengan metode problem based learning dengan pendekatan pembelajaran yang berpusat pada mahasiswa. Pada tahap ini, tujuannya adalah untuk memperoleh bukti efektifitas proses pembelajaran dalam meningkatkan kemampuan hasil belajar.
Pada tahap pertama atau tahun pertama, penelitian ini menggunakan pendekatan Research and Development. Dalam pelaksanaannya, terdapat tiga tahap yang dilakukan yaitu, (1) tahap pengembangan produk media media pembelajaran robot manipulator dengan sistem kendali keseimbangan menggunakan NN dengan fungsi aktivasi backpropagation, (2) tahap pengembangan perangkt pembelajaran adapun langkah-langkah yang dilakukan pada intiya ada 4 langkah-langkah, yaitu: (a) analisis kebutuhan
209 perangkat lunak.pembelajaran dan perangkat keras robot, (b) desain perangkat lunak/pembelajaran dan perangkat keras, (c) pembuatan perangkat pembelajaran robot dan panduan praktikum robot, dan (d) pengujian perangkat pembelajaran dan robot manipulator dan (3) tahap implementasi produk dalam proses PBM. Pada tahap pengembangan produk, proses yang dilakukan adalah mengembangkan hardware dan software robot manipulator dengan berbagai komponen pendukungnya.
Langkah-langkah yang dilakukan dalam pengembangan produk media pembelajaran sesuai dengan yang dijelaskan oleh Pressman (1997:37) dan Rolston (1988:40) yang meliputi emilihan dan analisis kebutuhan sistem (perangkat keras dan perangkat lunak model robot). Perancangan model perangkat keras robot dan algoritma, pengujian produk. Gambar berikut ini menunjukkan blok diagram sistem secara umum pada robot manipulator yang akan dirancang.
Tahap pengembangan software Sistem Kendali Cerdas Jaringan Syaraf Tiruan (NN). Tahap ini adalah perancangan sistem kendali cerdas JST dengan metode backpropagation. Tahap ini dilakukan dengan beberapa langkah berikut ini: (a) Tahap ini dimulai dengan menentukan posisi sudut yang menjadi acuan dan target dari gerakan robot lengan manipulator. (b) Melakukan perhitungan untuk mencari Error (c) Melakukan perhitungan Feedforward pada JST untuk mencari nilai PWM (d). Memeriksa setiap pergerakan motor, Gambar 4 berikut ini menunjukan flowchart cara kerja sistem kendali JST.
Gambar 1. Diagram Blok secara Umum Robot Manipulator
PC Mikrokontroller Motor
Sensor (rotary encoder & Zero
210 Tahap selanjutnya adalah mengembangkan produk perangkat pembelajaran dan panduan media pembelajaran sistem kendali keseimbangan robot manipulator. Pada tahap ini hasil yang diharapakan meliputi hand out, jobsheet, dan prosedur penilaian untuk hasil belajar mahasiswa. Tahap ini belum dilaksanakan dan akan dilaksanakan pada tahun kedua.
Tahap implementasi produk adalah menerapkan produk robot dan produk perangkat pembelajaran serta panduan praktikum dalam proses pembelajaran dengan metode problem based learning dengan pendekatan pembelajaran student centered learning. Pada tahap ini bertujuan untuk memperoleh hasil tentang efektivitas proses pembelajaran dalam meningkatkan kemampuan hasil belajar khususnya pada ranah intelektual dan emesional mahasiswa. Tahap ini belum dilaksanakan dan akan dilaksanakan pada tahun ketiga.
Untuk pengembangan perangkat pembelajaran menggunakan observasi, dan angket. Pelaksanaan sebagian besar dengan cara Focus Group Design. Tim peneliti mendatangkan nara sumber yang ahli tentang media pendidikan, materi pendidikan, dan strategi pendidikan, guna memperoleh perangkat pebelajaran yang baik.
Teknik pengumpulan data dalam penelitian ini menggunakan observasi, tes dan angket. Observasi dilakukan untuk memperoleh data proses pembelajaran yang dilakukan oleh dosen maupun mahasiswa. Tes digunakan untuk mengukur kemampuan pemahaman mahasiswa terhadap materi kuliah sistem kendali keseimbangan robot yang telah dijelaskan sebelum dilakukan tes. Angket digunakan untuk menjaring data mengenai pembelajaran yang dilakukan oleh dosen.
Sedangkan instrumen yang digunakan pada penelitian ini adalah daftar check list. Instrument ini digunakan untuk mencatat dan mengamati proses pembelajaran yang
Gambar 2. Cara Kerja NN
Letakkan benda bawaan End Start Input Degree (SP) Hitung: Error=SP-PV DError= Errorn – Errorn-1
JST : FeedForward
Kirim nilai PWM & gerakan lengan Apakah
211 terjadi selama penelitian berlangsung. Tes yang berupa butir-butir pertanyaan yang digunakan untuk mengukur kemampuan pemahaman mahasiswa dalam matakuliah Sistem Robotika. Instrumen angket/kuisioner berupa pertanyaan ataupun pernyataan yang memiliki empat alternatif jawaban disusun berdasarkan skala Likert.
Teknik analisis untuk, 1) pengembangan media pembelajaran robot manipulator dengan sistem kendali keseimbangan menggunakan NN dengan fungsi aktivasi backpropagation dan pengembangan perangkat pembelajaran, serta panduan praktikum, 2) mengevaluasi pengaruh peneraan metode pembelajaran kooperatif berbasis problem based learning yang berpusat pada mahasiswa terhadap efektifitas pembelajaran mata kuliah Sistem Robotika, dilakukan secara deskriftif kualitatif dengan menelaah kesan mahasiswa, tingkat kehadiran dan sebaran nilai akhir mahasiswa. Di samping itu, dilakukan penyebaran kuesioner kepada mahasiswa peserta kuliah pada pertemuan akhir perkuliahan. Teknik analisis data untuk mengetahui efektivitas penerapan problem based learning menggunakan metode statistik korelasional.
HASIL DAN PEMBAHASAN
Pada tahun pertama ini fokus dari penelitian adalah pembuatan media pembelajaran yang berbentuk robot. Proses perakitan robot dilaksanakan dengan beberapa tahap. Tahap pertama adalah perancangan dan desain mekanik (body) robot, selanjutnya tahap kedua adalah perancangan elektronik dan yang ketiga adalah perancangan dan desain sistem software (sistem kendali) pada robot.
Desain dan Manufaktur Mekanik Robot
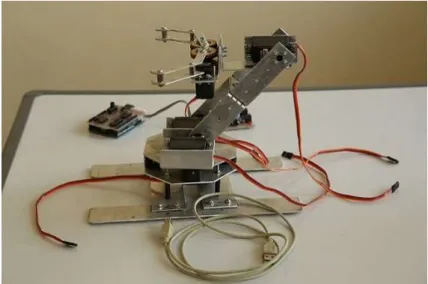
Pada tahap awal telah dilakukan desain dan perancangan secara mekanik untuk robot lengan. Adapun hasil desain dan perancangan mekanik seperti pada Gambar berikut.
Gambar 3. Desain dan Perancangan Mekanik Robot
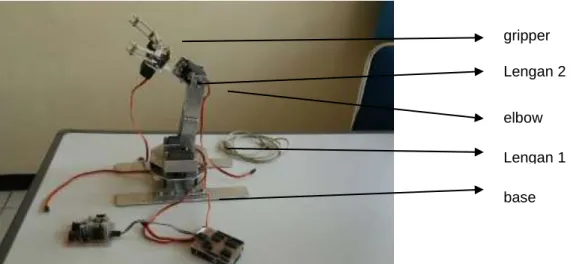
212 Desain dan rancangan mekanik meliputi: (1) base untuk robot, (2) lengan 1 robot, (3) lengan 2 robot, (4) siku robot (elbow), (5) griper robot (penjapit benda). Penjelasan bagian robot dapat dilihat seperti pada Gambar berikut ini.
Perancangan Rangkaian Elektronika
Perancangan rangkaian elektronika diperlukan sebagai interfacing antara mekanik robot dan software robot. Rangkaian elektronika yang dimaksud meliputi: (1) power supply untuk motor dan rangkaian driver serta rangkaian mikrokontroller, (2) Driver motor untuk semua penggerak bagian robot, (3) ADC dan DAC sebagai pembaca sensor.
Rangkaian power supply pada project ini dibuat dengan tiga (3) bagian. Bagian pertama untuk supply motor servo pada base robot dan griper robot dengan keluaran 12 volt, sedangkan bagian kedua adalah power supply dengan keluaran 12 volt untuk Lengan 1 dan Lengan 2 serta untuk siku robot. Adapun power supply untuk rangkaian mikrokontroller dibuat dengan voltage keluaran adalah 5 volt. Bagian kedua, rangkaian driver motor didesain untuk menggerakkan semua motor yang digunakan. Ada lima motor servo yang dipakai sebagai penggeraka base, siku, lengan 1, lengan 2 serta untuk gripper. Oleh karena itu telah dibuat rangkaian driver motor untuk kelima motor servo tersebut. Sekanjutnya, bagian ketiga yaitu rangkaian analog to digital converter (ADC) telah dirancang untuk mengkonversi bacaan encoder pada motor. Rangkaian ini berupa kombinasi mikrokontroller dan input-output dari encoder untuk dapat membaca gerakan motor terutama pada motor penggerak lengan 1 dan lengan 2. Rangkaian ini diperlukan untuk mendapatkan signal analog dari encoder sehingga akan dikonversi menjadi digital sebagai feedback dari motor. Signal Feedback ini akan digunakan sebagai bahan masukan sebagai pengurang input (reference) sehingga didapatkan signal error.
Gambar 4. Penjelasan Bagian Robot
gripper Lengan 2 elbow Lengan 1 base
213
Perancangan software.
Perancangan software ini meliputi uji coba interfacing input-output robot dengan komputer menggunakan arduino software maupun menggunakan matlab. Selanjutnya telah dibuat juga software untuk sistem kendali robot lengan berbasis NN dengan metode backpropagation. Adapun software untuk pengujian akses interfacing input-output pada robot telah digunakan software arduino dengan hasil script pemrograman sebagai berikut.
#include <VarSpeedServo.h>
VarSpeedServo servo0; // motor servo aktuator base robot VarSpeedServo servo1; // motor servo1 aktuator lengan robot VarSpeedServo servo2; // motor servo2 aktuator lengan robot VarSpeedServo servo3; // motor servo aktuator siku robot VarSpeedServo servo4; // motor servo aktuator gripper robot const int servo0Pin = 0; // base
const int servo1Pin = 12; // lengan1 const int servo2Pin = 13; // lengan2 const int servo3Pin = 8; // siku/elbow const int servo4Pin = 4; // gripper void setup(){ servo0.attach(servo0Pin); // base servo1.attach(servo1Pin); // lengan1 servo2.attach(servo2Pin); // lengan2 servo3.attach(servo3Pin); // elbow servo4.attach(servo4Pin); // gripper servo0.write(0,255,true); servo1.write(0,255,true); servo2.write(0,255,true); servo3.write(0,255,true); servo4.write(0,255,true); delay(2000); } void loop(){
servo4.write(150,70,true); // gripper tutup delay(1000);
servo3.write(35,70,true); // elbow angkat delay(1000);
servo0.write(70,70,true); // base delay(1000);
servo3.write(0,70,true); // elbow turun delay(1000);
servo4.write(180,70,true); // gripper buka delay(1000);
servo0.write(178,70,true); // base delay(1000);
Script pemrograman di atas telah mampu menggerakkan semua elemen robot dari base, Lengan 1, Lengan 2, siku serta gripper robot. Adapun gerakan robot untuk setiap elemen adalah 2 gerakan putar kanan dan kiri, sehingga robot manipulator yang telah didesain ini mempunyai tiga derajat kebebasan (3 degree of freedom, 3 DOF). Dengan cara yang sama, robot dapat digerakkan menggunakan software Matlab. Adapun software ujicoba gerakan robot menggunakan matlab seperti pada script berikut ini.
214 clear a;
global a;
delete(instrfind({'Port'},{'COM1'}))
a=arduino('COM1'); % nomor port COM interface MATLAB - Arduino a.servoAttach(2); % Base robot
a.servoAttach(4); % Lengan-1 a.servoAttach(8); % Lengan-2 a.servoAttach(9); % Siku/elbow a.servoAttach(7); % Gripper while(1) % Skenario-1
a.servoWrite(2, 178) % Base putar kiri pause(1);
a.servoWrite(7, 180) % Gripper buka pause(1);
a.servoWrite(9, 35) % Siku angkat pause(1);
a.servoWrite(4, 155) % Lengan-1 maju a.servoWrite(8, 155) % Lengan-2 maju pause(1);
% Skenario-2
a.servoWrite(7, 145) % Gripper tutup -- ambil obyek pause(1);
a.servoWrite(9, 35) % Siku angkat (diam pada posisi terakhir) pause(1)
a.servoWrite(4, 180) % Lengan-1 mundur a.servoWrite(8, 180) % Lengan-2 mundur pause(1);
a.servoWrite(9, 0) % Siku turun pause(1);
a.servoWrite(2, 70) % Base putar kanan pause(1);
% Skenario-3
a.servoWrite(9, 35) % Siku angkat pause(1);
a.servoWrite(4, 155) % Lengan-1 maju a.servoWrite(8, 155) % Lengan-2 maju pause(1);
a.servoWrite(7, 180) % Gripper buka -- meletakkan obyek pause(1);
a.servoWrite(4, 180) % Lengan-1 mundur a.servoWrite(8, 180) % Lengan-2 mundur pause(1);
a.servoWrite(9, 0) % Siku turun pause(1);
a.servoWrite(2, 70) % Base putar kanan (diam pada posisi terakhir) pause(1);
215 Adapun software untuk sistem kendali berbasis NN dengan metode backpropagation seperti terlihat pada script berikut ini:
clear a; global a;
% Koneksi MATLAB - Arduino %delete(instrfind({'Port'},{'COM1'}))
a=arduino('COM1'); % --> nomor port COM interface MATLAB - Arduino
% Koneksi motor DC Servo pada board Arduino UNO a.servoAttach(2);
a.servoAttach(3); a.servoAttach(4);
% Posisi sudut servo input/target network-1
P=[a.servoRead(2) a.servoRead(3) a.servoRead(4)]; % sudut putar servo input T=[45 90 180]; % sudut putar servo target-1
% Posisi sudut servo input/target network-2
P1=[a.servoRead(2) a.servoRead(3) a.servoRead(4)]; % sudut putar servo input T1=[0 0 0]; % sudut putar servo target
while(1)
%---neural network-1 net = newff(P, T, 25);
Y = sim(net,P); % Nilai elemen matriks Y masih pecahan desimal
net.trainParam.show = 50; net.trainParam.epochs = 1000; net.trainParam.lr = 0.05; net.trainParam.goal = 1e-5;
net = init(net); % Initialize neural network net = train(net,P,T);
C = int8(Y); % mengubah nilai elemen matriks Y jadi matrik 16bit integer (bil. bulat) S = mat2str(C); % konversi matriks C jadi matriks string dgn kurung kotak []
W = eval(S); % eval menjadikan elemen matriks S tidak di dlm kurung kotak [] a.servoWrite(2,W(1,1)); pause(.5); a.servoWrite(3,W(1,2)); pause(.5); a.servoWrite(4,W(1,3)); pause(1); %---neural network-2 net1 = newff(P1, T1, 25); Y1 = sim(net1,P1); net1.trainParam.show = 50; net1.trainParam.epochs = 1000; net1.trainParam.lr = 0.05; net1.trainParam.goal = 1e-5;
net1 = init(net1); % Initialize neural network net1 = train(net1,P1,T1); C1 = int8(Y1); S1 = mat2str(C1); W1 = eval(S1); a.servoWrite(2,W1(1,1)); pause(.5); a.servoWrite(3,W1(1,2)); pause(.5); a.servoWrite(4,W1(1,3)); pause(1); %plot(P,T,'bo',P,Y1,'r*');
216 %xlabel('input');
%ylabel('Target atau Output'); %grid;
end
Pada pengujian NN didapatkan data sebagai berikut: (1) pada proses training dengan initial condition berikut ini.
Permintaan data output Pembacaan servo2=300 Pembacaan servo3=300 Pembacaan servo4=300 Parameter training=50;
Jumlah traininng =1000 epoch; Learning rate=0.05;
Sedangkan target yang ingin dicapai dengan error=1x10-5. (2) Pada saat pembelajaran didapat hasil
Pembacaan servo2=300 Pembacaan servo3=300 Pembacaan servo4=300
Hal ini menunjukkan error adalah nol, sehingga antara target dan reference dapat tercapai dengan baik.
KESIMPULAN
Sebagaimana telah dijelaskan di atas bahwa penelitian ini direncanakan pelaksanaannya dalam tiga (3) tahap atau tiga (3) tahun. Dari ketiga tahap tersebut, proses penelitian tahap pertama telah dilakukan dengan pendekatan Research and Development. Tahap pertama menghasilkan sebuah media pebelajaran yang berupa robot manipulator dengan sistem kendali keseimbangan gerak menggunakan neural network (NN) model backpropagation yang meliputi hardware dan software skala laboratorium.
Selanjutnya rencana penelitian pada tahap kedua (tahun kedua) adalah mengembangkan perangkat pembelajaran robot manipulator lengkap beserta perangkat penilaian hasil belajarnya. Perangkat pembelajaran tersebut meliputi: silabus, RPP, modul atau diktat, labsheet, dan perangkat penilaian hasil belajar. Pendekatan yang dilakukan pada tahap kedua ini masih menggunakan Research and Development untuk pengembangan perangkat pembelajaran. Pada tahap kedua ini tim peneliti merencanakan untuk melakukan focus group discussion (FGD) dengan mendatangkan berbagai narasumber media, materi pembelajaran, dan penilaian hasil belajar. Adapun model pengembangan yang digunakan dalam penelitian ini adalah model Four-D (define, design, develop, and disseminate) yang dikembangkan oleh Sivasailam Thiagarajan, etc.
217
DAFTAR PUSTAKA
Alam, M. S. and Tokhi, M. O. 2007. Design of Command Shaper Using Gain-Delay Units and Particle Swarm Optimisation Algorithm for Vibration Control of Flexible Systems. International Journal of Acoustics and Vibration. 12(3): 99–108.
Arsyad, A. 2002. Media Pembelajaran, edisi 1. Jakarta: PT. Raja Grafindo Persada. Chong, Vincent K. 1999. Cooperative Learninng: The Role of Feedback and Use of
Lecture Active on Student’s Academic Performance.
Criticos, C. 1996. Media Selection. Plomp, T & Ely, D.P (Eds): International Encyclopedia of Educational Technology, 2nd ed. UK: Cambridge University Press. pp. 182 - 185.
Dwivedy, S. K. and Eberhard, P. 2006. Dynamic Analysis of Flexible Manipulators, a Literature Review. Journal on Mechanism and Machine Theory. 41(7): 749–777. Gagne, R.M., Briggs, L.J & Wager, W.W. 1988. Principles of Instruction Design, 3rd ed.
New York: Saunders College Publishing.
Hamalik. 1994. Media Pendidikan, cetakan ke-7. Bandung: Penerbit PT. Citra Aditya Bakti.
Handoko, Hani. 2005. Metode Kasus Dalam Pengajaran. Makalah Lokakarya Peningkatan Kemampuan Pengajaran. Semarang.
Khairudin, M., Mohamed, Z., Husain, A. R. and Ahmad, A. 2010. Dynamic Modelling and Characterisation of a Two-Link Flexible Robot Manipulator. Journal of Low Frequency Noise, Vibration and Active Control. 29(3): 207-219.
Mohamed, Z., Martin, J. M., Tokhi, M. O., Sa da Costa, J. and Botto, M. A. 2005. Vibration Control of a Very Flexible Manipulator System. Control Engineering Practice. 13(3): 267-277.
Rohmad. 2015. Desain Model Pengembangan Perangkat Pembelajaran Matematika.
Diunduh pada tanggal 6 Maret 2015 dari
http://download.portalgaruda.org/article.php?article=136826&val=5678&title=Des ain%20Model%20Pengembangan%20%20Perangkat%20Pembelajaran%20Mate matika
Sri Kusuma Dewi. 2003. Artificial intelligence (Teknik dan Aplikasinya). Graha Ilmu: Yogyakarta