LAMPIRAN A
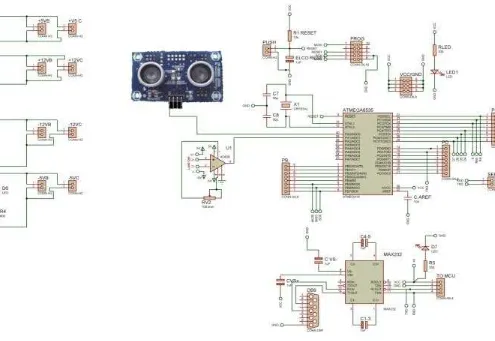
Pada gambar A. di bawah ini menjelaskan tentang layout atau susunan komponen yang mencakup semuanya alat pengukur Indeks Massa
Tubuh selanjutnya dapat di lihat pada gambar sebagai berikut :
LAMPIRAN A( Lanjutan )
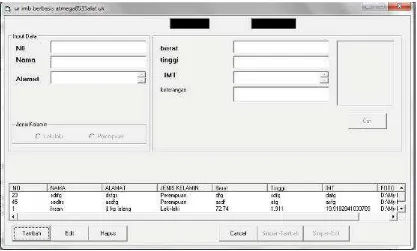
Pada gambar B di bawah ini merupakan suatu output dari sebuah alat pengukur Indeks
Massa Tubuh dapat di lihat pada form di bawah ini sebagai berikut :
LAMPIRAN A( Lanjutan )
Pada gambar C di bawah ini merupakan output Database alat pengukur Indeks Massa
Tubuh dapat di lihat pada form di bawah ini sebagai berikut :
LAMPIRAN B
Pada lampiran B ini terdapat 2 program,yaituprogram yang ada di dalam
mikrokontroller dengan menggunakan bahasa C sebagai pembaca data dari sensor
ultrasonic dan sensor load cell dan program VB yang di gunakan pada PC sebagai
output data terakhirselanjutnya dapat di perhatikan proram sebagai berikut :
Program Bahasa C ( Mikrokontroller )
/*****************************************************
This program was produced by the
CodeWizardAVR V2.05.3 Standard
Automatic Program Generator
© Copyright 1998-2011 Pavel Haiduc, HP InfoTech s.r.l.
http://www.hpinfotech.com
Project :
Version :
Date : 1/26/2013
Author : user
Company : free
Comments:
Chip type : ATmega8535
Program type : Application
AVR Core Clock frequency: 11.059200 MHz
Memory model : Small
External RAM size : 0
Data Stack size : 128
*****************************************************/
#include <mega8535.h>
#include <delay.h>
#include <stdio.h>
#define ADC_VREF_TYPE 0x40
// Read the AD conversion result
float read_adc(unsigned char adc_input)
{
ADMUX=adc_input | (ADC_VREF_TYPE & 0xff);
// Delay needed for the stabilization of the ADC input voltage
delay_us(10);
// Start the AD conversion
ADCSRA|=0x40;
// Wait for the AD conversion to complete
while ((ADCSRA & 0x10)==0);
ADCSRA|=0x10;
return ADCW;
}
// Declare your global variables here
#define SIG_out PORTB.4
#define SIG_in PINB.4
#define SIG_dir DDRB.4
float US,nilai,nil_ber,nilai3;
unsigned int i;
void tinggi(void)
{
SIG_dir = 1; // set variabel SIG sebagai output
SIG_out = 0; //memulai pengiriman pulsa
delay_us(20); //
SIG_out = 1; //
SIG_dir = 0; // set SIG pin sebagai input
while (SIG_in); // tunggu pulsa kembali
TCCR1B=0x02; //
while ((!SIG_in) && !(TIFR & 0x80)); //
TCCR1B=0x00; // hentikan timer
US = TCNT1; // simpan nilai TCNT1 ke variabel US
US = US/50; // convert to CM
US = 188-US;
}
void berat(void)
{
nil_ber=0;
for(i=0;i<=10000;i++)
{
nilai=read_adc(0);
nil_ber=nil_ber+nilai;
}
nil_ber=nil_ber/10000;
}
void kirim (void)
{
printf("%0.1f \r",nil_ber); //kirim nilai berat secara serial
printf("%0.1f \r",US); //kirim nilai tinggi secara serial
}
void main(void)
{
// Declare your local variables here
// Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTB=0x00;
DDRB=0x00;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTD=0x00;
DDRD=0x00;
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: Timer 0 Stopped
// Mode: Normal top=0xFF
// OC0 output: Disconnected
TCCR0=0x00;
TCNT0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: Timer1 Stopped
// Mode: Normal top=0xFFFF
// OC1A output: Discon.
// OC1B output: Discon.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
TCCR1A=0x00;
TCCR1B=0x00;
TCNT1H=0x00;
TCNT1L=0x00;
ICR1H=0x00;
ICR1L=0x00;
OCR1AH=0x00;
OCR1AL=0x00;
OCR1BH=0x00;
OCR1BL=0x00;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer2 Stopped
// Mode: Normal top=0xFF
// OC2 output: Disconnected
ASSR=0x00;
TCCR2=0x00;
TCNT2=0x00;
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
// INT2: Off
MCUCR=0x00;
MCUCSR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x00;
// USART initialization
// Communication Parameters: 8 Data, 1 Stop, No Parity
// USART Receiver: On
// USART Transmitter: On
// USART Mode: Asynchronous
// USART Baud Rate: 9600
UCSRA=0x00;
UCSRB=0x18;
UCSRC=0x86;
UBRRH=0x00;
UBRRL=0x47;
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80;
SFIOR=0x00;
// ADC initialization
// ADC Clock frequency: 86.400 kHz
// ADC Voltage Reference: AVCC pin
// ADC High Speed Mode: Off
// ADC Auto Trigger Source: Free Running
ADCSRA=0xA7;
SFIOR&=0x0F;
// SPI initialization
// SPI disabled
SPCR=0x00;
// TWI initialization
// TWI disabled
TWCR=0x00;
while (1)
{
tinggi();
berat();
kirim();
}
Program Visual Basic (VB 6,0)
Dim data As ListItem Dim pilih As Integer
Private Sub cmd_browse_Click() With cd
.Filter = "All Files (*.*)|*.*|Jpeg Files (*.jpg)|*.jpg|Png Files(*.*)|*.png|Bitmap Files(*.*)|*.bmp"
Private Sub cmd_operasi_Click(Index As Integer) Dim Weight, High As Double
If k >= 25.1 Then If k <= 27 Then
Text3 = "Gemuk ringan" End If
End If
If k > 27 Then
Text3 = "Gemuk berat" End If txt_alamat.Text = lv.SelectedItem.SubItems(2)
If lv.SelectedItem.SubItems(3) = opt_kel(0).Caption Then opt_kel(0).Value = True
Image1.Picture = LoadPicture(lv.SelectedItem.SubItems(7)) Label7.Caption = lv.SelectedItem.SubItems(7)
aktif
Exit Sub ed:
aktif
MsgBox "Direktori/Foto telah diPindah", vbInformation, "Pesan" Case 2 'hapus
If lv.SelectedItem.Selected = False Then
pilih = 0
del = "Delete From database where NO ='" &lv.ListItems(m).Text & "'"
MsgBox "Data yang Anda Pilih Terhapus", vbInformation, "Pesan" If txt_no.Text = "" Then
MsgBox "Isi no ", vbInformation, "Pesan" ElseIf txt_nama.Text = "" Then
MsgBox "Isi Nama anda", vbInformation, "Pesan" ElseIf txt_alamat.Text = "" Then
MsgBox "Isi Alamat anda", vbInformation, "Pesan"
ElseIf opt_kel(0).Value = False And opt_kel(1).Value = False Then MsgBox "Isi Jenis Kelamin anda", vbInformation, "Pesan" ElseIf Text2(0).Text = "" Then
MsgBox "Berat belum terisi", vbInformation, "Pesan" ElseIf Text2(1).Text = "" Then
!Jenis_kelamin = opt_kel(1).Caption
MsgBox "Isi Alamat anda", vbInformation, "Pesan"
ElseIf opt_kel(0).Value = False And opt_kel(1).Value = False Then MsgBox "Isi Jenis Kelamin anda", vbInformation, "Pesan" ElseIf Text2(0).Text = "" Then
MsgBox "Berat belum terisi", vbInformation, "Pesan" ElseIf Text2(1).Text = "" Then